В настоящей заявке используются материалы корейской заявки №2004-81201, поданной 12 октября 2004 в Корейское бюро по защите интеллектуальной собственности, содержание этой заявки включено в настоящее описание путем ссылки.
УРОВЕНЬ ТЕХНИКИ
Область техники
Настоящее изобретение относится к роботу-уборщику пылесосного типа с автономным перемещением, а более конкретно - к способу коррекции гироскопического датчика в таком роботе-уборщике, который измеряет угол поворота с использованием гироскопического датчика.
Описание известных технических решений
Обычно робот-уборщик перемещается по контуру очищаемой им области, ограниченной стенами или препятствиями, с использованием ультразвукового датчика, установленного на корпусе уборщика, для определения очищаемой области или распознавания очищаемой области по информации, введенной пользователем. Затем робот-уборщик планирует путь, перемещаясь по которому он способен эффективно очистить распознанную область уборки. Наконец, робот-уборщик управляет своей приводной частью, чтобы следовать по запланированному пути, и управляет пылесосной частью, осуществляя уборку.
Для перемещения по запланированному пути робот-уборщик вычисляет свое текущее положение с использованием абсолютных координат или относительных координат с использованием расстояния, пройденного от базовой точки в очищаемой области, и угла поворота.
Например, при применении способа перемещения с использованием абсолютных координат робот-уборщик вычисляет текущее положение с помощью изображения потолка, полученного камерой на приборах с зарядовой связью (ПЗС-камерой). Более конкретно, робот-уборщик обнаруживает на изображении потолка объекты, например лампы накаливания, лампы дневного света или метки опознавания положения, позволяющие распознать отдельные места, с целью определения своего текущего положения, и перемещается на основе данных о текущем местоположении. Однако способ перемещения с использованием ПЗС-камеры требует наличия высокоэффективной системы и больших затрат на ее создание, поскольку необходимо осуществлять быструю обработку большого количества изображений.
Робот-уборщик, перемещающийся с использованием относительных координат, включает датчик расстояния, способный измерять пройденное расстояние, и угловой датчик, позволяющий измерять угол поворота робота-уборщика. В качестве датчика пройденного расстояния широко используется устройство, которое способно подсчитывать количество оборотов колес, а в качестве углового датчика широко используется гироскопический датчик, который может измерять относительный угол поворота. При использовании гироскопического датчика робот-уборщик при прямолинейном движении может поворачиваться на желаемые углы, и поэтому направлением перемещения робота-уборщика можно легко управлять. Однако гироскопический датчик имеет погрешность приблизительно 5˜10% от величины измеряемых углов. Погрешность возникает вследствие постоянной ошибки в результате интегрирования выходного сигнала гироскопического датчика 31 и изменения масштабного множителя в зависимости от изменения параметров внутри помещения, например температуры и влажности. Более конкретно, если количество поворотов робота-уборщика растет, и накопленный угол поворота становится большим, погрешность накапливается до таких пределов, что робот-уборщик уже не может следовать по запланированному пути. Поэтому после того, как робот-уборщик заканчивает перемещение по запланированному пути, некоторая область остается недостаточно убранной.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение призвано устранить вышеупомянутые недостатки и решить другие проблемы, присущие известным устройствам. Целью настоящего изобретения является создание такого способа коррекции гироскопического датчика для робота-уборщика пылесосного типа, чтобы, если робот-уборщик пройдет больше, чем определенное заданное расстояние, он корректировал величину выходного сигнала гироскопического датчика с целью точного следования по запланированному пути.
Для достижения вышеупомянутых целей предлагается способ коррекции гироскопического датчика для робота-уборщика, включающий переход в режим коррекции, если перемещение робота-уборщика превысит некоторый порог коррекции; и коррекцию величины выходного сигнала гироскопического датчика с использованием верхней камеры.
Порог коррекции может определяться на основе накопленного угла поворота робота-уборщика.
Коррекция включает определение пути перемещения с помощью верхней камеры с вычислением угла пути перемещения; вычисление угла пути перемещения по величине выходного сигнала гироскопического датчика в процессе движения по пути перемещения; вычисление разности между углом пути перемещения, вычисленным с использованием верхней камерой, и углом пути перемещения, вычисленным с использованием гироскопического датчика; и коррекцию величины выходного сигнала гироскопического датчика с использованием разности между этими двумя углами.
Определение пути перемещения включает выделение маркерной точки, соответствующей объектам на потолке, из изображения потолка, снятого верхней камерой, и выбор текущего положения и целевого места перемещения робота-уборщика с помощью этой маркерной точки.
Целевое место может быть выбрано так, чтобы находиться под некоторым углом относительно предыдущего направления перемещения робота-уборщика. Этот некоторый угол может быть меньше, чем приблизительно ±90°.
Как описано выше, согласно способу корректировки гироскопического датчика, предлагаемому в настоящем изобретении, робот-уборщик переходит в режим коррекции с целью корректировки величины выходного сигнала гироскопического датчика в случае, если робот-уборщик превысил порог коррекции. Поэтому погрешность гироскопического датчика остается меньше заданного значения, в результате чего робот-уборщик может точно следовать по запланированному пути.
В результате, если в роботе-уборщике используется способ коррекции гироскопического датчика согласно настоящему изобретению, будут отсутствовать неочищенные области, обусловленные погрешностями гироскопического датчика, как имело бы место в известных технических решениях.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Вышеупомянутые аспекты и признаки настоящего изобретения станут понятнее из описания некоторых вариантов его выполнения со ссылками на сопровождающие чертежи, где:
на фиг.1 показан вид в перспективе робота-уборщика согласно одному из вариантов выполнения настоящего изобретения;
на фиг.2 показана блок-схема с функциональными блоками робота-уборщика, изображенного на фиг.1;
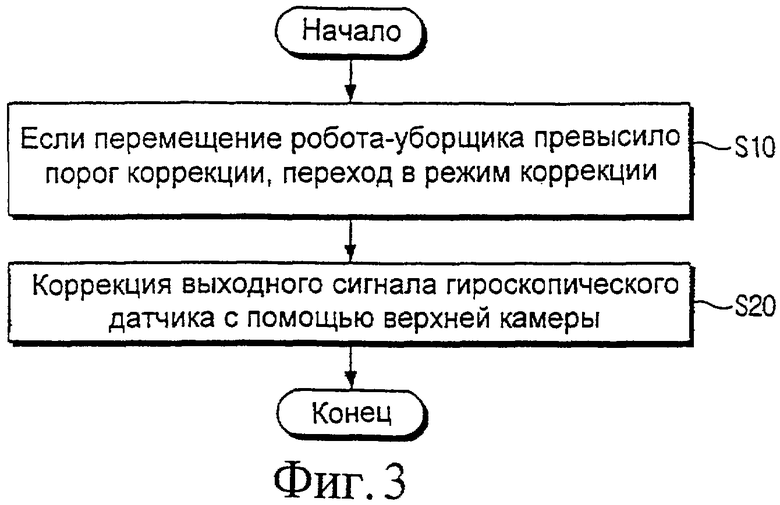
на фиг.3 показана последовательность операций способа коррекции гироскопического датчика робота-уборщика согласно одному из вариантов выполнения настоящего изобретения;
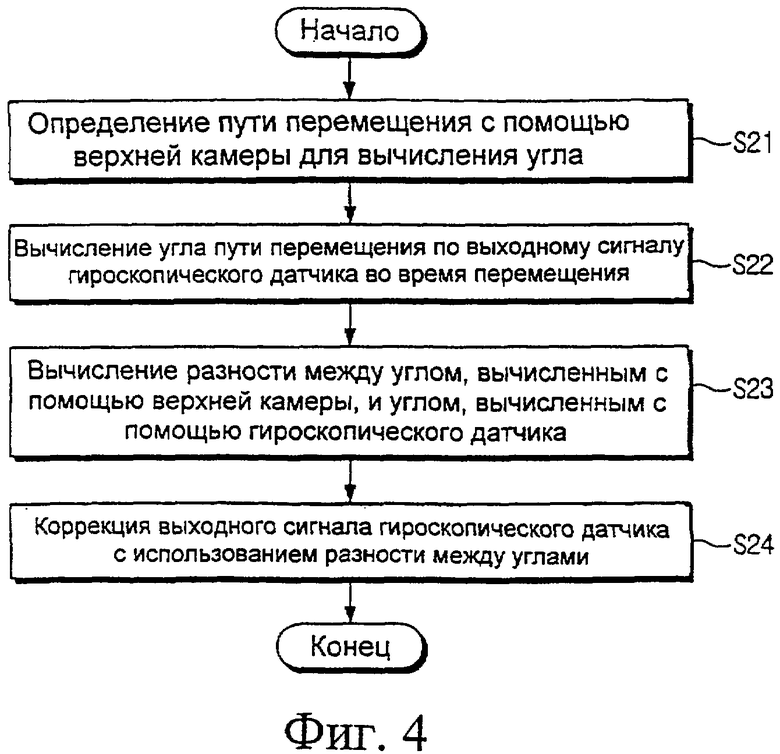
на фиг.4 показана последовательность операций при выполнении коррекции в одном из вариантов выполнения способа коррекции гироскопического датчика для робота-уборщика, изображенного на фиг.3; и
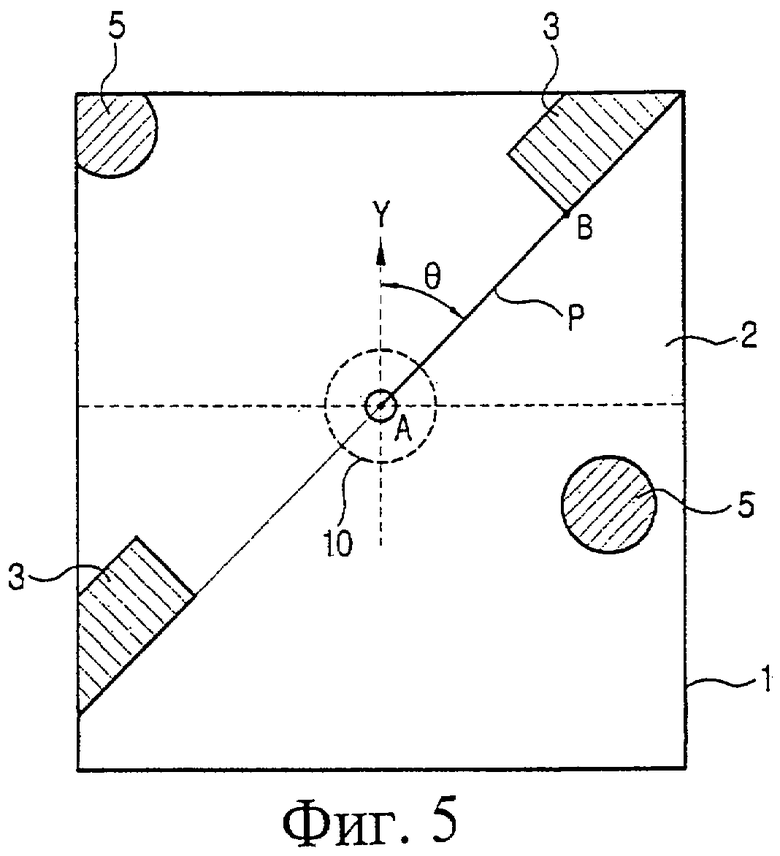
на фиг.5 показано изображение потолка, полученное верхней камерой робота-уборщика.
ПОДРОБНОЕ ОПИСАНИЕ ПРИМЕРОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Ниже некоторые варианты выполнения настоящего изобретения описаны более подробно со ссылками на сопровождающие чертежи.
В последующем описании одинаковые элементы на разных чертежах обозначены одинаковыми позициями. Объекты, определенные в настоящем описании, например детализированная конструкция и элементы, даны только для лучшего понимания настоящего изобретения. Таким образом, понятно, что настоящее изобретение может быть осуществлено без этих конкретных объектов. Кроме того, известные функции или конструкции не описываются подробно, поскольку они помешали бы изложению изобретения ненужными подробностями.
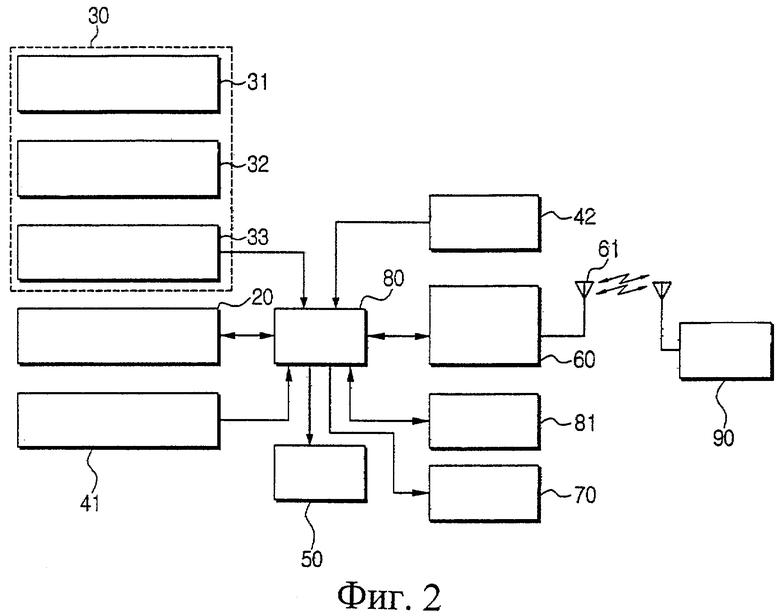
На фиг.1 показан вид в перспективе робота-уборщика согласно одному из вариантов выполнения настоящего изобретения, а на фиг.2 показана блок-схема с функциональными блоками робота-уборщика, изображенного на фиг.1.
На фиг.1 и 2 изображен робот-уборщик 10, который содержит пылесосную часть 20, блок 30 датчиков, переднюю камеру 41, верхнюю камеру 42, приводную часть 50, передающую/приемную часть 60, силовую часть 70, запоминающее устройство 81 и управляющую часть 80, установленные в основном корпусе 11 в соответствующих местах.
Пылесосная часть 20 может быть различного типа, она обеспечивает втягивание содержащего пыль воздуха с очищаемого пола. Например, пылесосная часть 20 может просто содержать двигатель для всасывания, щетку для всасывания, которая втягивает воздух с пылью с использованием силы всасывания двигателя, и пылеуловительную камеру, расположенную между двигателем для всасывания и щеткой для всасывания. Пылеуловительная камера имеет всасывающее отверстие и выходное отверстие, связанные по потоку с щеткой и двигателем. Воздух втягивается через всасывающее отверстие и, отделенный от пыли выходит через выходное отверстие.
Блок 30 датчиков включает гироскопический датчик, предназначенный для измерения угла поворота робота-уборщика, датчик 32 пройденного расстояния, предназначенный для измерения пройденного расстояния, и датчик 33 обнаружения препятствий, предназначенный для обнаружения препятствий, например стен.
Гироскопический датчик 31 используется в случае, когда роботу-уборщику 10 требуется изменить направление движения. Перед изменением направления движения гироскопический датчик 31 определяет угол поворота, то есть угол относительно самого последнего направления движения (в дальнейшем именуемого "текущим направлением движения"). Как правило, гироскопический датчик 31 имеет погрешность измеренного угла приблизительно 5-10%. Погрешность возникает вследствие постоянной ошибки в результате интегрирования выходного сигнала гироскопического датчика 31 и изменения масштабного множителя в зависимости от изменения параметров внутри помещения, например температуры и влажности. Гироскопический датчик 31 определяет угол поворота относительно определенного направления, например текущего направления движения, и поэтому, если углы поворота робота-уборщика 10 накапливаются, погрешность угла поворота робота-уборщика в процессе работы возрастает. Поэтому, чтобы робот-уборщик 10 точно следовал по запланированному пути, эту погрешность необходимо корректировать.
В качестве датчика 32 пройденного расстояния можно использовать датчик измерения оборотов, который измеряет количество оборотов колес. В качестве датчика измерения оборотов можно использовать, например, устройство преобразования угол-код, которое измеряет количество оборотов вала двигателя. Управляющая часть 80 вычисляет расстояние, пройденное роботом-уборщиком 10, по количеству оборотов, измеренному устройством преобразования.
Датчик 33 обнаружения препятствий включает инфракрасный светоизлучающий элемент и инфракрасный светоприемный элемент, предназначенный для приема отраженного инфракрасного луча, эти элементы расположены попарно вдоль внутренней поверхности по внешнему периметру корпуса 11 и направлены по существу перпендикулярно корпусу. С другой стороны, датчик 33 обнаружения препятствий может быть ультразвуковым датчиком, который испускает ультразвуковую волну и принимает отраженную ультразвуковую волну. Датчик 33 обнаружения препятствий может использоваться для измерения расстояния до препятствия или стены.
Верхняя камера 42 установлена на основном корпусе 11 для получения изображения пространства над роботом-уборщиком 10 и подачи полученных изображений в управляющую часть 80. Передняя камера 41 установлена на основном корпусе 11 для получения изображения пространства перед роботом-уборщиком 10 и подачи полученных изображений в управляющую часть 80. Передняя камера 41 не является обязательной, а устанавливается при необходимости. Например, передняя камера 41 может использоваться для обнаружения препятствия впереди или опознавательных меток (не показаны) станции 100 подзарядки. В качестве передней камеры 41 и верхней камеры 42 могут использоваться ПЗС-камеры.
Приводная часть 50 включает два ведущих колеса, расположенных по бокам спереди, и два ведомых колеса, расположенных по бокам сзади, два приводных двигателя для вращения двух ведущих колес 52, соответственно, и трансмиссионное средство, предназначенное для передачи движущей силы от ведущих колес к ведомым колесам. Трансмиссионное средство может включать зубчатый ремень и шкив. Кроме того, трансмиссионное средство 55 может содержать шестерни. Ведущие колеса установлены в нижней части корпуса 11 так, что их центральные оси расположены на одной линии. Каждый из приводных двигателей приводной части 50 вращается вперед или назад независимо, в соответствии с управляющим сигналом из управляющей части 80. Направление движения можно менять путем соответствующего управления скоростями вращения приводных двигателей 51.
Передающая/приемная часть 60 посылает данные через антенну 61 и передает сигнал из антенны 61 в управляющую часть 80. Соответственно, робот-уборщик 10 может передавать сигналы во внешнее устройство 90 и получать сигналы оттуда. Внешнее устройство 90 может включать компьютерную систему с программой, обеспечивающей контроль и управление перемещением робота-уборщика 10, или удаленный контроллер, предназначенный для дистанционного управления роботом-уборщиком. Для уменьшения объема обработки в управляющей части 80 робота-уборщика 10 внешнее устройство 90, например компьютерная система, может выполнять вычисления для коррекции величины выходного сигнала гироскопического датчика 31 с использованием данных изображения, полученных верхней камерой 42. В такой системе управляющая часть 80 робота-уборщика 10 посылает данные изображения из верхней камеры 42 через передающую/приемную часть 60 во внешнее устройство 90 и получает из внешнего устройства 90 результат обработки для коррекции величины выходного сигнала гироскопического датчика 31.
Силовая часть 70 содержит аккумуляторную батарею, в которой запасена электроэнергия, поступающая из станции подзарядки (не показана), и снабжает электроэнергией все компоненты робота-уборщика 10, так что робот-уборщик 10 может перемещаться и производить уборку автономно.
Управляющая часть 80 обрабатывает сигналы, полученные из передающей/приемной части 60, и так управляет каждым компонентом робота-уборщика 10, чтобы последний выполнял предписанные работы. Управляющая часть 80 определяет рабочую область для робота-уборщика 10 путем перемещения вдоль стен или препятствий с использованием датчика 32 обнаружения препятствий и запоминает определенную рабочую область в запоминающем устройстве 81; альтернативно, рабочая область робота-уборщика может также быть введена в запоминающее устройство 81 пользователем. Затем управляющая часть 80 вычисляет путь, по которому робот-уборщик 10 способен эффективно перемещаться в рабочей области, хранимой в запоминающем устройстве 81. Затем управляющая часть 80 управляет приводной частью 50 и пылесосной частью 20 с использованием датчика 33 пройденного расстояния и углового датчика 31, так что робот-уборщик 10 перемещается вдоль рассчитанного пути и производит уборку. Когда уборка закончена или когда необходима подзарядка, управляющая часть 80 управляет приводной частью 50 так, чтобы робот-уборщик 10 смог возвратиться в базовую точку или к станции 100 подзарядки. Другими словами, управляющая часть 80 управляет роботом-уборщиком 10 так, чтобы он возвратился в базовую точку или к станции подзарядки, путем идентификации местоположения с использованием передней камеры 41, верхней камеры 42 или ультразвукового датчика. Это не будет описываться подробно, поскольку не является существенной частью настоящего изобретения.
Управляющая часть 80 определяет, превысил ли робот-уборщик 10 в процессе уборки порог коррекции. Если это имеет место, управляющая часть 80 прекращает уборку и переходит в режим коррекции для коррекции величины выходного сигнала гироскопического датчика 31. Порог коррекции, который задает период коррекции для гироскопического датчика 31, может быть определен на основе различных базовых величин. Например, за основу может быть взято время, прошедшее с момента, когда робот-уборщик 10 покинул станцию подзарядки и приступил к уборке, или все пройденное роботом-уборщиком 10 расстояние в процессе уборки. Однако для коррекции гироскопического датчика 31 порог коррекции может базироваться на накопленном угле поворота робота-уборщика 10 в процессе уборки. Альтернативно, пользователь может сам ввести порог коррекции в управляющую часть 80 с учетом точности гироскопического датчика 31 или отклонения робота-уборщика 10 при повороте.
Когда робот-уборщик 10 переходит в режим коррекции, управляющая часть 80 с помощью верхней камеры 42 делает снимок потолка над роботом-уборщиком 10, определяет путь перемещения робота-уборщика 10 для коррекции с использованием данных снятого изображения, и корректирует величину выходного сигнала гироскопического датчика 31 с использованием этого пути перемещения.
Ниже со ссылками на фиг.З-5 описан способ коррекции гироскопического датчика робота-уборщика согласно одному из вариантов выполнения настоящего изобретения.
Вначале робот-уборщик 10 находится в ждущем состоянии в базовой позиции, совпадающей с местоположением станции подзарядки. Робот-уборщик 10 заносит в память область, которую необходимо очистить, и производит расчет пути для эффективной уборки намеченной области.
При получении сигнала пуска робот-уборщик 10 покидает базовую позицию, перемещается по запланированному пути и производит уборку.
Управляющая часть 80 определяет, превысил ли робот-уборщик 10 в процессе уборки порог коррекции. Если это имеет место, управляющая часть 80 прерывает работу робота-уборщика 10 и переходит в режим коррекции (S10). Порог коррекции представляет собой накопленный угол поворота робота-уборщика 10, равный сумме углов поворота в процессе уборки. Пользователь вводит порог коррекции для накопленных углов поворота в запоминающее устройство 81 с помощью клавишного устройства ввода (не показано) или внешнего устройства 90.
Когда робот-уборщик 10 переходит в режим коррекции, управляющая часть 80 корректирует величину выходного сигнала гироскопического датчика 31 с помощью верхней камеры 42. Ниже подробно описан шаг проведения управляющей частью 80 коррекции гироскопического датчика 31 (S20) с помощью верхней камеры 42.
Сначала управляющая часть 80 управляет приводной частью 50 так, чтобы остановить робота-уборщика 10. Верхняя камера 42 получает изображение 1 потолка 2. Управляющая часть 80 определяет текущее положение робота-уборщика 10 с помощью данных изображения, полученных от верхней камеры 42, и определяет путь Р, который необходимо пройти для коррекции гироскопического датчика 31. Для определения пути Р по данным изображения управляющая часть 80 может использовать различные известные способы обработки изображений. Например, управляющая часть 80 может выделить из данных изображения маркерные точки и по ним определить путь Р. Маркерные точки могут быть оборудованием, например лампами дневного света, датчиками пожарной сигнализации и лампами накаливания. Альтернативно, маркерными точками могут быть идентификационные метки, выполненные специально для идентификации положения робота-уборщика с помощью камеры. Для выделения маркерных точек из полученного изображения можно использовать различные известные способы. Например, полученное изображение можно преобразовать в уровни серого, соединить пиксельные точки с одинаковой яркостью, а затем в качестве маркерной точки взять пиксельную область, яркость которой отличается от яркости окружающих областей. Кроме того, вид распределения данных изображения для маркерных точек можно заранее запомнить, и в качестве маркерной точки определять область изображения, имеющую аналогичное распределение.
На фиг.5 показан пример изображения 1, полученного верхней камерой 42. Управляющая часть 80 выделяет маркерные точки из полученного изображения 1 с использованием вышеизложенного способа обработки изображения, и с помощью маркерной точки выбирает текущее положение и целевое положение, которое находится на некотором расстоянии от текущего положения робота-уборщика 10. На фиг.5 точка В, соответствующая краю лампы 3 дневного света, выбрана в качестве целевого положения. Целевое положение В выбрано так, что линия Р (в дальнейшем называемая "путем перемещения"), соединяющая целевое положение В и текущую точку А положения робота-уборщика 10, и предыдущее направление Y перемещения робота-уборщика 10 образуют некоторый угол. Угол между путем Р перемещения и направлением Y перемещения робота-уборщика 10 может быть меньше, чем приблизительно ±180°, а предпочтительно меньше, чем приблизительно ±90°. Управляющая часть 80 запоминает в запоминающем устройстве 81 угол θ, под которым путь Р перемещения направлен относительно предыдущего направления Y перемещения робота-уборщика 10 (S21).
Управляющая часть 80 управляет приводной частью 50 так, чтобы робот-уборщик двигался в целевое положение В. Управляющая часть 80 определяет, достиг ли робот-уборщик 10 целевого положения В с помощью данных изображения, полученных верхней камерой 42. Управляющая часть 80 считывает величину выходного сигнала гироскопического датчика 31 в процессе перемещения робота-уборщика 10 и вычисляет угол θ′ пути Р перемещения с помощью гироскопического датчика 31 (S22).
С помощью уравнения (1) управляющая часть 80 вычисляет разность (Δθ) между углом θ пути Р перемещения, вычисленным по данным изображения, полученным верхней камерой 10, и углом θ′ пути Р перемещения, вычисленным с помощью гироскопического датчика 31, результат записывается в запоминающее устройство (S23).

Если угол θ пути Р перемещения, вычисленный с помощью верхней камеры 42, больше угла θ′ пути Р перемещения, вычисленного с помощью гироскопического датчика 31, разность Δθ между этими углами является положительной, а если угол θ пути Р перемещения, вычисленный с помощью верхней камеры 42, меньше угла θ′ пути Р перемещения, вычисленного с помощью гироскопического датчика 31, разность Δθ между этими углами является отрицательной.
Управляющая часть 80 устанавливает хранимую в памяти разность Δθ между обоими углами пути Р перемещения в качестве величины коррекции для гироскопического датчика 31 (S24). В результате, когда управляющая часть 80 вычисляет угол поворота робота-уборщика 10 с помощью гироскопического датчика 31, управляющая часть 80 всегда рассматривает эту величину в качестве фактического угла поворота робота-уборщика 10, полученного вычитанием хранимой в памяти разности Δθ между обоими углами из угла, вычисленного по значению выходного сигнала гироскопического датчика 31.
Управляющая часть 80 управляет приводной частью 50 робота-уборщика 10 так, чтобы возвратить робота-уборщика 10 в положение, в котором робот-уборщик 10 прервал выполнение работы и направился к целевому положению В. Если робот-уборщик 10 возвратился к предыдущему рабочему положению А, управляющая часть 80 выходит из режима коррекции робота-уборщика 10 и продолжает нормальную работу.
Через определенные интервалы времени управляющая часть 80 определяет, превышен ли в процессе работы робота-уборщика 10 порог коррекции. Если это имеет место, робот-уборщик 10 прерывает свою работу и вновь переходит в режим коррекции (S10).
Как описано выше, согласно способу коррекции гироскопического датчика 31 в рамках настоящего изобретения, робот-уборщик 10 переходит в режим коррекции для коррекции угловой погрешности гироскопического датчика 31, если робот-уборщик 10 переместился больше, чем составляет порог коррекции. Поэтому погрешность гироскопического датчика 31 не накапливается, и точность перемещения повышается. Кроме того, отсутствуют области, не убранные роботом-уборщиком 10 вследствие неточности его перемещения.
Вышеописанный вариант выполнения настоящего изобретения и достигаемые с его помощью преимущества служат просто примером и не должны рассматриваться как ограничение настоящего изобретения. Изобретение может быть легко применено к другим типам устройств. Кроме того, описание вариантов выполнения настоящего изобретения служит лишь иллюстрацией, а не ограничивает изобретение, сформулированное в формуле изобретения, в то время как специалистам в данной области техники очевидны различные варианты, изменения и модификации настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОРРЕКЦИИ КООРДИНАТ РОБОТА-УБОРЩИКА И АВТОМАТИЧЕСКАЯ СИСТЕМА УБОРКИ С ИСПОЛЬЗОВАНИЕМ ЭТОГО СПОСОБА | 2005 |
|
RU2283750C1 |
| РОБОТ-УБОРЩИК (ВАРИАНТЫ), РОБОТОТЕХНИЧЕСКАЯ СИСТЕМА-УБОРЩИК И СПОСОБ УПРАВЛЕНИЯ ИМИ | 2003 |
|
RU2242159C1 |
| СИСТЕМА РОБОТА -ПЫЛЕСОСА С ВНЕШНИМ ЗАРЯДНЫМ УСТРОЙСТВОМ (ВАРИАНТЫ) И СПОСОБ СТЫКОВКИ РОБОТА -ПЫЛЕСОСА С ВНЕШНИМ ЗАРЯДНЫМ УСТРОЙСТВОМ | 2003 |
|
RU2262880C2 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ РОБОТОМ | 2005 |
|
RU2293647C1 |
| СИСТЕМА С ЧИСТЯЩИМ РОБОТОМ, ВЫПОЛНЕННАЯ С ИСПОЛЬЗОВАНИЕМ МОБИЛЬНОЙ СЕТИ СВЯЗИ | 2001 |
|
RU2212995C2 |
| РОБОТ-ПЫЛЕСОС И СИСТЕМА РОБОТА-ПЫЛЕСОСА | 2003 |
|
RU2262878C2 |
| РОБОТ-УБОРЩИК И УСТРОЙСТВО УПРАВЛЕНИЯ РОБОТОМ-УБОРЩИКОМ | 2006 |
|
RU2313269C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УБОРКИ И СПОСОБ ВОЗВРАТА РОБОТА-УБОРЩИКА К ВНЕШНЕМУ ЗАРЯДНОМУ УСТРОЙСТВУ | 2005 |
|
RU2303387C2 |
| РОБОТ-УБОРЩИК С ФУНКЦИЕЙ ДЕЗИНФЕКЦИИ ПОЛА | 2004 |
|
RU2272557C2 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ УБОРКИ, РОБОТ-УБОРЩИК И СПОСОБ УПРАВЛЕНИЯ РОБОТОМ-УБОРЩИКОМ | 2014 |
|
RU2620236C1 |
Изобретение относится к роботу-уборщику пылесосного типа с автономным перемещением, а более конкретно к способу коррекции гироскопического датчика робота-уборщика. Способ коррекции гироскопического датчика для робота-уборщика включает переход в режим коррекции, если перемещение робота-уборщика превышает некоторый порог коррекции, и коррекцию величины выходного сигнала гироскопического датчика с использованием верхней камеры, установленной на основном корпусе робота-уборщика. Порог коррекции представляет собой сумму поворота робота-уборщика. Коррекция включает определение пути перемещения с помощью верхней камеры с вычислением угла пути перемещения; вычисление угла пути перемещения по величине выходного сигнала гироскопического датчика в процессе движения по пути перемещения; вычисление разности между углом пути перемещения, вычисленным с использованием верхней камерой, и углом пути перемещения, вычисленным с использованием гироскопического датчика; и коррекцию величины выходного сигнала гироскопического датчика с использованием разности между этими двумя углами. Определение пути перемещения включает выделение маркерной точки, соответствующей объектам на потолке, из изображения потолка, снятого верхней камерой, и выбор текущего положения и целевого места перемещения робота-уборщика с помощью этой маркерной точки. Техническим результатом изобретения является способ коррекции гироскопического датчика для робота-уборщика пылесосного типа, осуществляющий коррекцию величины выходного сигнала гироскопического датчика с целью точного следования по запланированному пути. 2 н. и 11 з.п. ф-лы, 5 ил.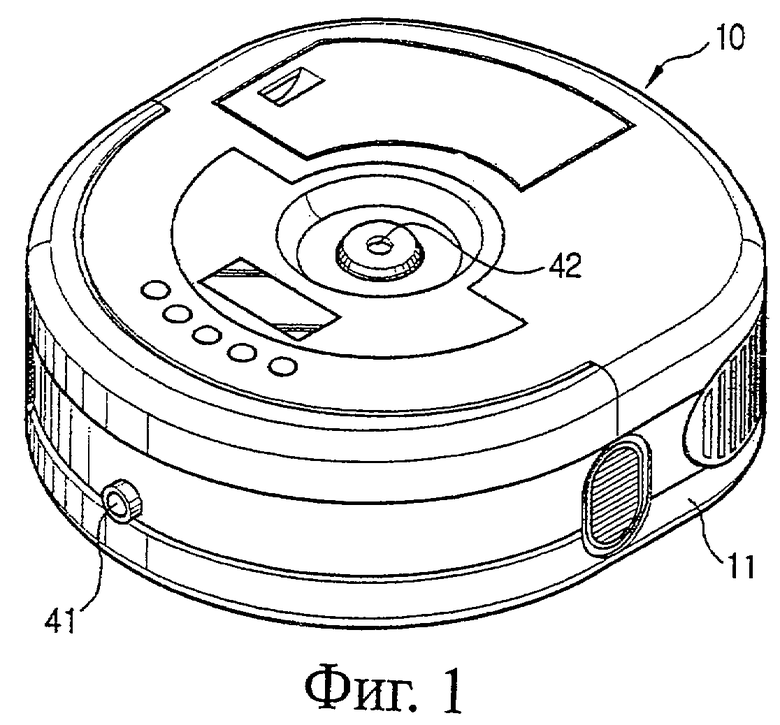
| К.МАГНУС | |||
| Гироскоп | |||
| Теория и применение | |||
| - М.: Мир, 1974, с.363-367 | |||
| Устройство для испытания гироприборов | 1975 |
|
SU711361A1 |
| US 5646494 А, 08.07.1997 | |||
| УСТРОЙСТВО для ЖИДКОСТНОЙ ОБРАБОТКИ ЖГУТОВ ХИМИЧЕСКОГО ВОЛОКНА | 0 |
|
SU364353A1 |

