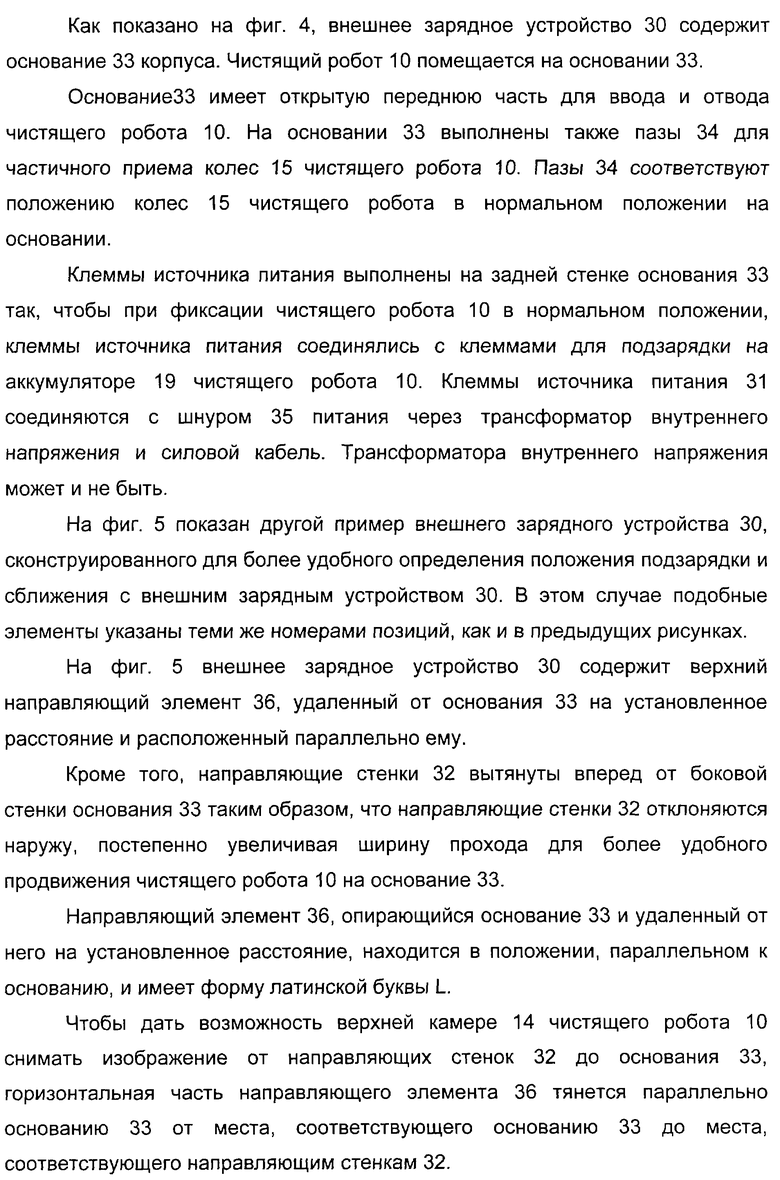
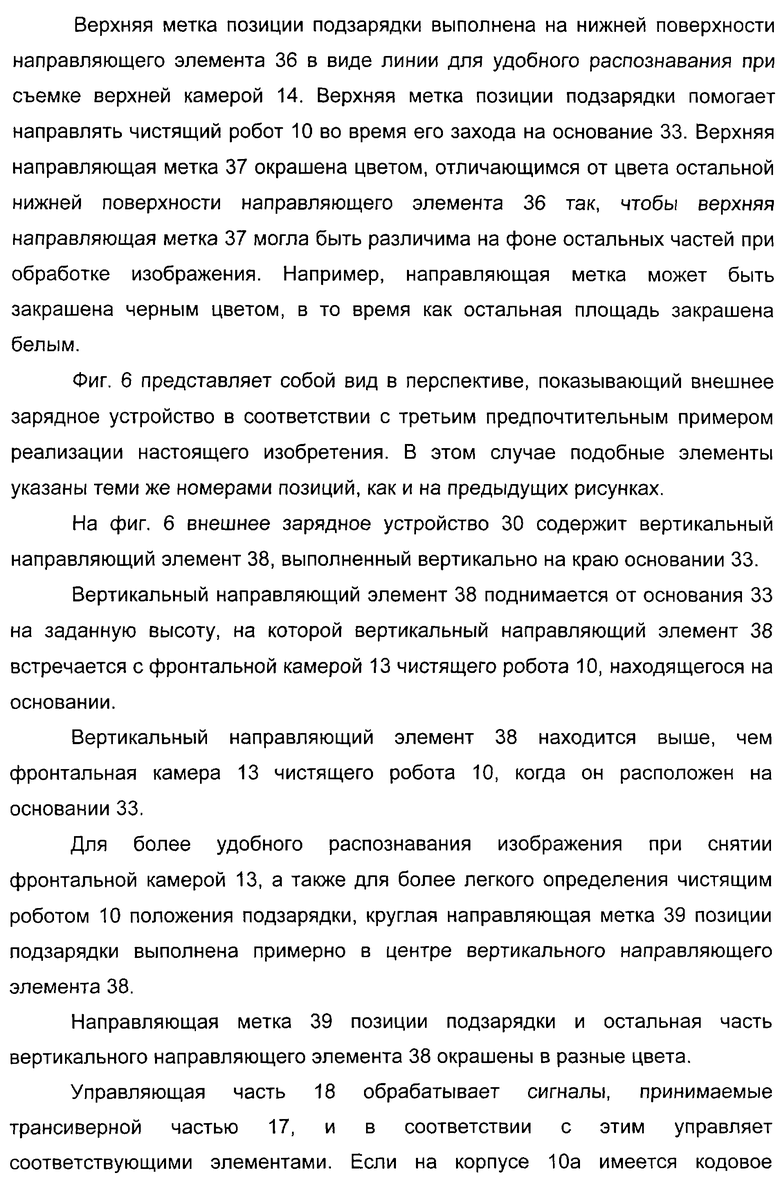
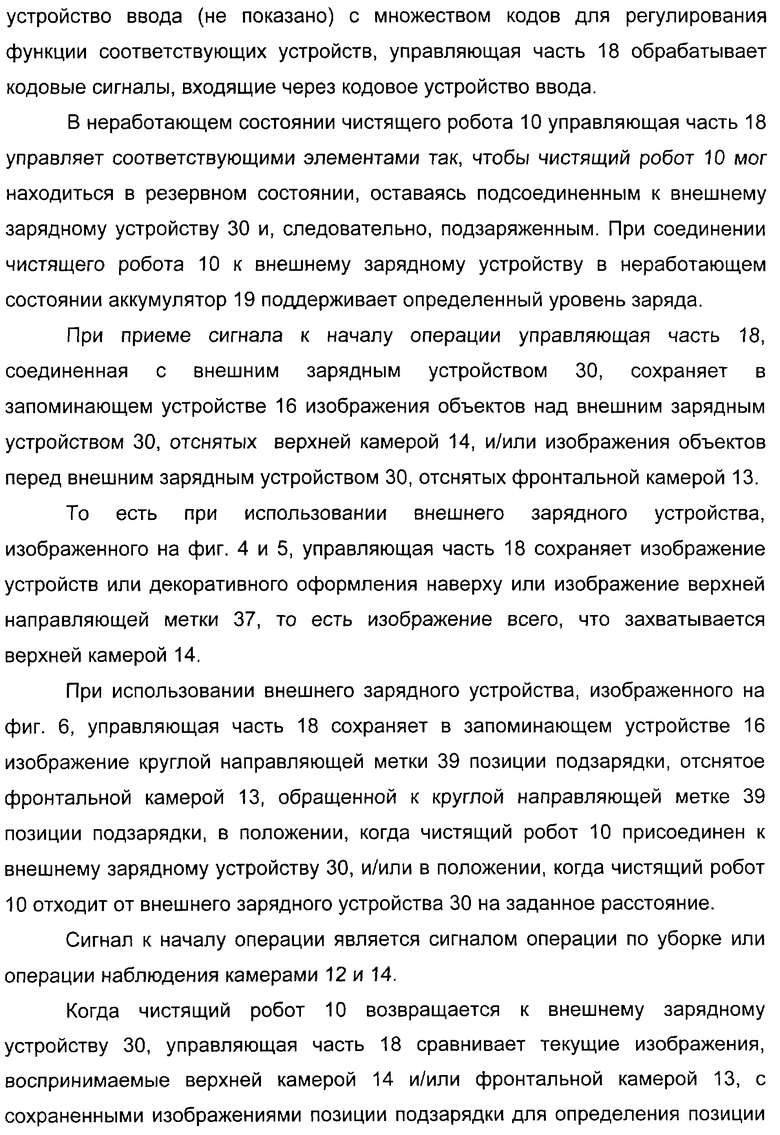
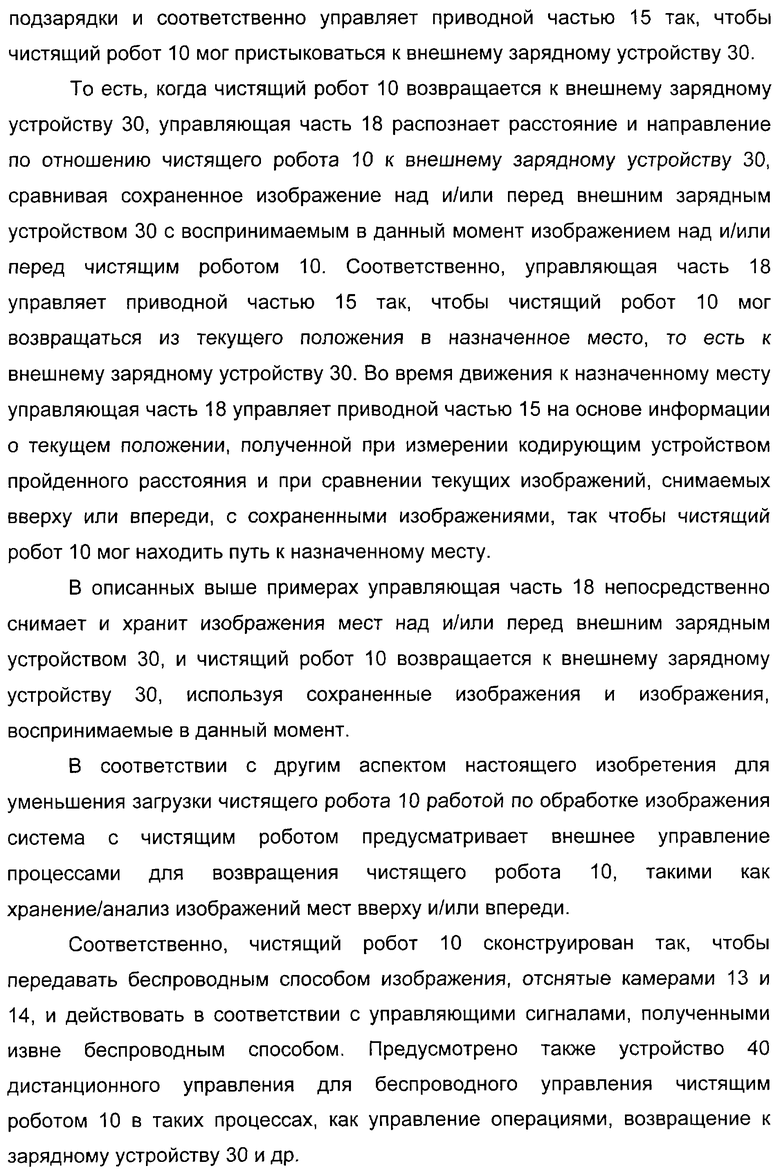
Текст описания в факсимильном виде (см. графическую часть) Т
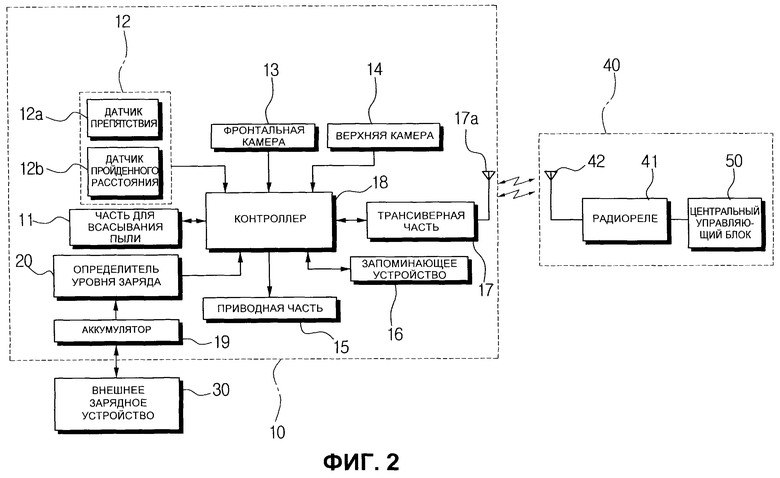
Изобретение может быть использовано для очистки различных площадей. Чистящий робот предназначен для выполнения работы при беспроводной связи с внешним устройством и содержит приводную часть для привода множества колес, по меньшей мере одну камеру для съемки внешнего окружения, установленную на корпусе чистящего робота, и контроллер для съемки изображения с помощью камеры для распознавания положения присоединения во время соединения внешнего зарядного устройства и чистящего робота и для хранения отснятого изображения, для управления приводной частью так, чтобы чистящий робот мог перемещаться от внешнего зарядного устройства к назначенному месту при получении соединенным с внешним зарядным устройством чистящим роботом сигнала к началу работы, и для отслеживания пути к положению присоединения чистящего робота к внешнему зарядному устройству во время возвращения чистящего робота к внешнему зарядному устройству путем сравнения текущего изображения, воспринимаемого камерой в настоящий момент, с сохраненным изображением положения присоединения чистящего робота к внешнему зарядному устройству. Система с чистящим роботом содержит устройство дистанционного управления, связанное беспроводным способом с чистящим роботом. Внешнее зарядное устройство для подзарядки чистящего робота, связанного с внешним зарядным устройством беспроводным способом при выполнении операций по уборке, содержит корпус, на котором установлен вывод источника питания для соединения с выводом для подзарядки на аккумуляторе чистящего робота, направляющий элемент, выполненный в определенном месте на корпусе с возможностью съемки его камерой чистящего робота, и направляющую метку позиции подзарядки, выполненную в определенном месте на направляющем элементе с возможностью съемки ее камерой чистящего робота. Согласно способу возвращения чистящего робота к внешнему зарядному устройству при получении соединенным с внешним зарядным устройством чистящим роботом сигнала к началу работы осуществляют съемку камерой чистящего робота изображения для распознавания позиции подзарядки, для распознавания чистящим роботом положения присоединения, в котором чистящий робот соединен с внешним зарядным устройством, выполняют заданную работу при передвижении чистящего робота и при необходимости подзарядки чистящего робота или при завершении заданной работы отслеживают путь к внешнему зарядному устройству посредством сравнения текущего изображения, воспринимаемого камерой, с сохраненным изображением для распознавания позиции подзарядки и возвращение чистящего робота к внешнему зарядному устройству. Изобретения обеспечивают точное положение робота при его стыковке с зарядным устройством. 4 с. и 16 з.п. ф-лы, 7 ил.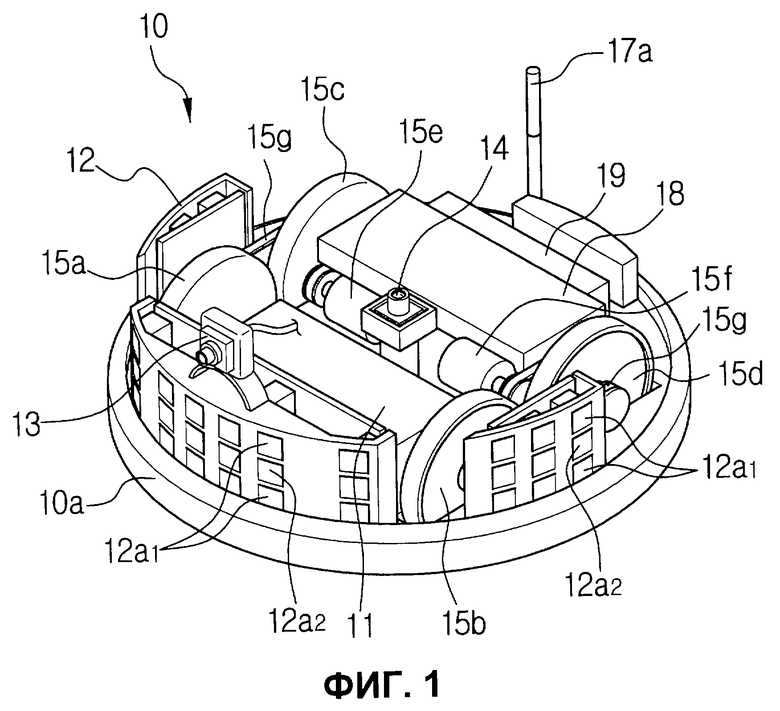
1. Чистящий робот для выполнения работы при беспроводной связи с внешним устройством, содержащий приводную часть для привода множества колес, по меньшей мере одну камеру для съемки внешнего окружения, установленную на корпусе чистящего робота, и контроллер для съемки изображения с помощью камеры для распознавания положения присоединения во время соединения внешнего зарядного устройства и чистящего робота и для хранения отснятого изображения, для управления приводной частью так, чтобы чистящий робот мог перемещаться от внешнего зарядного устройства к назначенному месту при получении соединенным с внешним зарядным устройством чистящим роботом сигнала к началу работы, и для отслеживания пути к положению присоединения чистящего робота к внешнему зарядному устройству во время возвращения чистящего робота к внешнему зарядному устройству путем сравнения текущего изображения, воспринимаемого камерой в настоящий момент, с сохраненным изображением положения присоединения чистящего робота к внешнему зарядному устройству.2. Чистящий робот по п.1, в котором камера является верхней камерой, установленной на корпусе чистящего робота для съемки объекта, находящегося в вертикальном положении над чистящим роботом по направлению движения, при этом контроллер получает изображение места над внешним зарядным устройством от верхней камеры присоединенного к внешнему зарядному устройству чистящего робота для фиксации изображения и хранения полученного изображения в качестве изображения положения присоединения и для отслеживания пути к внешнему зарядному устройству при возвращении чистящего робота к внешнему зарядному устройству с помощью сравнения воспринимаемого верхней камерой изображения с сохраненным изображением положения присоединения.3. Чистящий робот по п.1, который содержит определитель уровня заряда для определения уровня заряда аккумулятора, установленного в корпусе с возможностью соединения и разъединения с внешним зарядным устройством, при этом контроллер останавливает работу при получении от определителя уровня заряда сигнала о необходимости подзарядки сигнала и управляет приводной частью таким образом, чтобы чистящий робот возвратился к внешнему зарядному устройству.4. Чистящий робот по п.1, в котором контроллер управляет приводной частью таким образом, чтобы робот возвратился к внешнему зарядному устройству при завершении роботом своей работы.5. Чистящий робот по п.1, который содержит установленную на корпусе чистящего робота фронтальную камеру для съемки изображения перед чистящим роботом в направлении движения, при этом контроллер получает отснятое фронтальной камерой изображение места перед внешним зарядным устройством, сохраняет полученное изображение в качестве изображения положения присоединения чистящего робота к внешнему зарядному устройству и отслеживает путь к внешнему зарядному устройству при возвращении чистящего робота к внешнему зарядному устройству, сравнивая воспринимаемое фронтальной камерой изображение с сохраненным изображением положения присоединения чистящего робота к внешнему зарядному устройству.6. Система с чистящим роботом, содержащая устройство дистанционного управления, связанное беспроводным способом с чистящим роботом, имеющим образованную множеством колес приводную часть и по меньшей мере одну камеру для съемки внешнего окружения, установленную на корпусе чистящего робота, и предназначенное для получения изображения от камеры для распознавания положения присоединения чистящего робота к внешнему зарядному устройству и хранения полученного изображения, для управления приводной частью для возможности передвижения чистящего робота от внешнего зарядного устройства к назначенному месту при получении соединенным с внешним зарядным устройством чистящим роботом сигнала к началу работы и для управления чистящим роботом так, чтобы он мог присоединяться к внешнему зарядному устройству, сравнивая текущее изображение, воспринимаемое камерой, с сохраненным изображением положения присоединения чистящего робота к внешнему зарядному устройству.7. Система с чистящим роботом по п.6, содержащая установленную на корпусе чистящего робота верхнюю камеру для съемки изображения в вертикальном направлении над чистящим роботом по направлению движения, при этом устройство дистанционного управления получает от верхней камеры изображение места над внешним зарядным устройством, снятое во время соединения чистящего робота с внешним зарядным устройством, и сохраняет полученное изображение в качестве изображения положения присоединения для подзарядки.8. Система с чистящим роботом по п.6, содержащая определитель уровня заряда для определения уровня заряда аккумулятора, установленного на чистящем роботе с возможностью соединения и разъединения с внешним зарядным устройством, при этом устройство дистанционного управления останавливает чистящий робот при получении сигнала о необходимости подзарядки, вырабатываемого определителем уровня заряда и передаваемого от чистящего робота.9. Система с чистящим роботом по п.6, в котором устройство дистанционного управления управляет чистящим роботом при завершении чистящим роботом своей работы так, чтобы чистящий робот мог вернуться к внешнему зарядному устройству.10. Внешнее зарядное устройство для подзарядки чистящего робота, связанного с внешним зарядным устройством беспроводным способом при выполнении операций по уборке и имеющего камеру для съемки внешнего окружения, содержащее корпус, на котором установлен вывод источника питания для соединения с выводом для подзарядки на аккумуляторе чистящего робота, направляющий элемент, выполненный в определенном месте на корпусе с возможностью съемки его камерой чистящего робота, и направляющую метку позиции подзарядки, выполненную в определенном месте на направляющем элементе с возможностью съемки ее камерой чистящего робота.11. Внешнее зарядное устройство по п.10, в котором корпус содержит основание, в котором выполнены пазы для приема части колес чистящего робота, находящегося в положении, когда вывод для подзарядки чистящего робота соединен с выводом источника питания.12. Внешнее зарядное устройство по п.11, в котором направляющий элемент сформирован на определенной высоте от основания параллельно ему, а направляющая метка позиции подзарядки выполнена на нижней поверхности направляющего элемента.13. Внешнее зарядное устройство по п.12, содержащее проходящую от основания до определенной высоты направляющую стенку для перемещения чистящего робота на основание и отвода робота с основания, при этом направляющий элемент и направляющая метка позиции подзарядки продлены на установленное расстояние, соответствующее расстоянию от направляющей стенки до основания, для возможности съемки камерой чистящего робота.14. Внешнее зарядное устройство по п.13, в котором направляющая метка позиции подзарядки проходит по линии, имеющей определенную длину.15. Внешнее зарядное устройство по п.11, в котором направляющий элемент сформирован на корпусе вертикально по отношению к корпусу до определенной высоты, а направляющая метка позиции подзарядки выполнена на направляющем элементе в месте, где направляющая метка может быть снята фронтальной камерой чистящего робота.16. Внешнее зарядное устройство по п.15, в котором направляющий элемент выполнен обращенным к фронтальной камере чистящего робота, находящегося на основании.17. Внешнее зарядное устройство по п.15, в котором направляющая метка позиции подзарядки выполнена в форме круга.18. Способ возвращения чистящего робота к внешнему зарядному устройству, включающий следующие этапы: а) при получении соединенным с внешним зарядным устройством чистящим роботом сигнала к началу работы осуществление съемки камерой чистящего робота изображения для распознавания позиции подзарядки, для распознавания чистящим роботом положения присоединения, в котором чистящий робот соединен с внешним зарядным устройством, б) выполнение заданной работы при передвижении чистящего робота и в) при необходимости подзарядки чистящего робота или при завершении заданной работы отслеживание пути к внешнему зарядному устройству посредством сравнения текущего изображения, воспринимаемого камерой, с сохраненным изображением для распознавания позиции подзарядки и возвращение чистящего робота к внешнему зарядному устройству.19. Способ по п.18, согласно которому на этапе а) чистящий робот, соединенный с внешним зарядным устройством, снимает с помощью камеры и сохраняет изображение места над внешним зарядным устройством для распознавания позиции подзарядки.20. Способ по п.18, согласно которому на этапе а) чистящий робот снимает с помощью камеры и сохраняет изображение места перед внешним зарядным устройством для распознавания позиции подзарядки.