Изобретение относится к области акустики (к нелинейной гидроакустики, в частности) и может быть использовано в подводных аппаратах (ПА) для обеспечения навигационной безопасности их мореплавания и всплытия на поверхность моря, в частности.
Задача, которая решается изобретением, заключается в дальнем обнаружении, идентификации и определении пространственных координат воздушных (ВО), надводных (НО) и подводных (ПО) объектов, а также параметров морского волнения (MB) по информации, содержащейся в гидроакустических высокочастотных (ВЧ) волнах накачки, излученных с ПА, рассеянных на приповерхностном пузырьковом слое (ППС), глубинном пузырьковом слое (ГПС) и донном пузырьковом слое (ДПС), в акустических и гидроакустических низкочастотных (НЧ) волнах, формируемых в процессе движения ВО, НО и ПО, а также в ВЧ волнах и комбинационных волнах, образованных в неоднородной морской среде за счет нелинейного взаимодействия гидроакустических ВЧ волн накачки и НЧ акустических и гидроакустических волн, относительно простым способом в условиях ПА для обеспечения его навигационной безопасности плавания и всплытия на поверхность моря.
Способ реализуется следующим образом.
Подводный аппарат совершает плавание в неоднородной морской среде (с ППС, ГПС и ДПС). В районе всплытия на поверхность моря возможно столкновение с ВО, НО и ПО. В этом случае акустические системы самой носовой оконечности (НОК) и самой кормовой оконечности (КОК) ПА с помощью соответствующих поворотных устройств ориентированы в пространстве таким образом, чтобы по направлениям «справа», «слева» и «вниз» обеспечивалась максимальная акустическая чувствительность: характеристики направленности (ХН) соответствующих акустических систем ПА полностью перекрывались в каждой плоскости, а по направлению «верх» обеспечивалась максимальная площадь поиска ВО - ХН соответствующих акустических систем были максимально разведены в противоположные стороны.
В специальных блоках производится формирование и усиление ВЧ сигнала накачки на частотах: ω1, соответствующей резонансной частоте ППС; ω2, соответствующей резонансной частоте ГПС; ω3=2ω2, соответствующей второй гармонике резонансной частоты ГПС, и ω4, соответствующей резонансной частоте ДПС, а с помощью соответствующих излучателей ВЧ сигнала накачки, расположенных на корпусе ПА на одинаковом угловом расстоянии в НОК и КОК, а также ориентированных определенным образом в пространстве, их направленное излучение в неоднородную морскую среду.
Рассеиваясь на неоднородностях морской среды, ВЧ сигнал накачки на частотах ω1, ω2, ω3 и ω4 модулируется по амплитуде и фазе (частоте) соответствующим НЧ полезным сигналом: Ωво - при наличии ВО, Ωно - при наличии НО, Ωпо - при наличии ПО и Ωвм - при наличии волнения моря. При этом образуются различные комбинационные частоты ωi± Ωj.
С помощью n приемников ВЧ сигнала накачки, расположенных на корпусе ПА на одинаковом угловом расстоянии в НОК и КОК, а также ориентированных определенным образом в пространстве, осуществляется направленный прием ВЧ сигнала накачки, рассеянного от различных неоднородностей морской среды. При наличии ВО, НО, ПО и волнения моря ВЧ сигнал накачки модулируется по амплитуде и фазе (частоте) соответствующим НЧ полезным сигналом. Например, для ВО: ω1± Ωво, ω1± Ωно, ω1± Ωпо и ω1± Ωвм.
С помощью коммутатора осуществляется последовательно-параллельное подключение n приемников ВЧ сигнала накачки к соответствующим блокам усиления и обработка принятого ВЧ сигнала накачки, в которых осуществляется выделение НЧ полезного сигнала Ωj из ВЧ сигнала накачки ωi методом амплитудной и фазовой (частотной) демодуляции. Далее НЧ полезный сигнал Ωj с выходов блоков усиления и обработки принятого ВЧ сигнала накачки поступает на соответствующий вход решающего устройства.
В зависимости от складывающейся обстановки с выхода решающего устройства сигнал управления подается на блок управления работой поворотных устройств, и соответствующие акустические системы ПА поворачиваются на необходимый угол в заданной плоскости. При этом:
- обнаружение объекта осуществляется по превышению сигнала над некоторым пороговым уровнем, выставленным заранее;
- определение направления на обнаруженный объект осуществляется по максимальному значению полезного сигнала, с учетом информации о гидролого-акустических характеристиках морской среды в районе плавания ПА и др.;
- определение направления движения обнаруженного объекта по отношению к ПА осуществляется по известному в акустике эффекту Доплера и др.;
- оперативная оценка класса обнаруженного объекта осуществляется по форме спектра принятого ВЧ сигнала накачки на входе блоков усиления и обработки принятого ВЧ сигнала накачки; по ожидаемой дальности обнаружения объекта; по информации, поступающей из блока определения дистанции триангуляционным способом и др.;
- идентификация обнаруженных объектов: определение классов, подклассов и самих объектов осуществляется в решающем устройстве методом сравнения с эталонными сигналами; по ожидаемой дальности обнаружения объектов; по информации, поступающей из блока определения дистанции триангуляционным способом и др.;
- определение пространственных координат обнаруженного объекта осуществляется по: направлению на него, ожидаемой дальности его обнаружения в данных гидролого-акустических условиях, соотношению сигнал-помеха на выходе соответствующего блока усиления и обработки ВЧ сигнала накачки, информации от блока определения пространственных координат триангуляционным способом и др.
При этом в решающее устройство постоянно поступают данные о вновь обнаруженных шумах и сигналах, гидролого-акустических условиях и волнении моря в данном географическом районе и др.
Известен способ обнаружения морских объектов по их первичному гидроакустическому полю, заключающийся в приеме шумов и сигналов в звуковом и ультразвуковом диапазонах частот, их усилении, спектральном анализе с целью выделения наиболее информативных классификационных признаков, сравнении их с эталонным сигналом и принятии решения об обнаружении морских объектов [1, стр.342].
К недостаткам данного способа относятся:
1. Незначительная дальность действия из-за использования звукового и ультразвукового диапазонов частот.
2. Влияние зон «акустической тени», обусловленных особенностями распространения гидроакустических волн звукового и ультразвукового диапазонов частот в неоднородной (содержащей звукорассеивающие слои, а также слои с большим градиентом температуры и др.) морской среде.
3. Ограниченный угловой сектор наблюдения, обусловленный направленностью антенны в вертикальной плоскости.
4. Наличие «мертвых» зон, обусловленных несформированностью характеристики направленности (ХН) антенны в ее ближней зоне.
5. Низкая достоверность идентификации обнаруженных объектов из-за невозможности использования инфразвукового диапазона частот.
6. Невозможность применения для обнаружения воздушных объектов (высокоскоростные суда на воздушных подушках, гидросамолеты и др.).
7. Невозможность применения в условиях подводного аппарата из-за больших размеров антенн др.
Известен способ обнаружения морских объектов по их вторичному гидроакустическому полю, заключающийся в формировании и излучении в направлении объекта поиска импульсного сигнала ультразвукового диапазона частот, полировании объекта поиска, приеме отраженного сигнала (эхо-сигнала), сравнении его с эталонным сигналом и принятие решения об обнаружении морского объекта [1, стр.91].
К недостаткам данного способа относятся:
1. Малая дальность действия, обусловленная использованием ультразвукового диапазона частот.
2. Влияние зон «акустической тени», обусловленных особенностями распространения гидроакустических волн ультразвукового диапазонов частот в неоднородной морской среде.
3. Ограниченный угловой сектор наблюдения, обусловленный направленностью антенны в вертикальной и горизонтальной плоскости.
4. Наличие «мертвых» зон, обусловленных реверберацией (послезвучанием излученного сигнала).
5. Зависимость от ракруса облучения объекта (минимальная эффективность на встречных курсах).
6. Низкая достоверность идентификации обнаруженных объектов из-за использовании информации, только содержащейся в эхо-сигнале.
7. Невозможность применения для обнаружения воздушных объектов (высокоскоростные суда на воздушных подушках, гидросамолеты и др.) и др.
Известен способ обнаружения источника НЧ гидроакустических излучений, заключающийся в формировании, усилении и излучении шумового ВЧ сигнала накачки, приеме сигналов комбинационных частот, нахождении функции корреляции между принятым сигналом накачки и задержанным случайным шумовым сигналом, формировании эквивалентной приемной антенной решетки, выделении НЧ полезного сигнала из ВЧ комбинационных частот, его спектральном анализе и сравнении с эталонным сигналом [2].
К недостаткам данного способа относится:
1. Ограниченная дальность действия из-за неиспользования инфразвукового диапазона частот, в котором сосредоточена основная энергия шумоизлучений объектов.
2. Влияние зон «акустической тени», обусловленных особенностями распространения гидроакустических волн звукового диапазона частот в неоднородной морской среде.
3. Сложность в обеспечении сканирования ХН антенны.
4. Низкая достоверность идентификации обнаруженных объектов из-за невозможности использования диапазона частот ниже 33-35 Гц.
5. Невозможность применения для обнаружения воздушных объектов (высокоскоростные суда на воздушных подушках, гидросамолеты и др.).
6. Сложность применения в условиях подводного аппарата и др.
Наиболее близким по технической сущности к заявляемому относится способ, выбранный в качестве способа-прототипа, обнаружения, идентификации и определения пространственных координат объектов при всплытии ПА, заключающийся в том, что с помощью n излучателей, расположенных на одинаковом угловом расстоянии на корпусе ПА и ориентированных определенным образом в пространстве, излучается ВЧ сигнал накачки на n частотах водную среду, при этом базовая частота ВЧ сигнала накачки соответствует резонансной частоте ППС, затем этот сигнал, будучи промодулированным по амплитуде НЧ полезным сигналом, принимается с помощью n приемников, расположенных определенным образом на корпусе ПА, при этом направленность по приему формируется за счет волновых размеров каждого из n приемников и соответствующей ему частоты ВЧ сигнала накачки, из него выделяется НЧ полезный сигнал, а определение направления на источник НЧ гидроакустических излучений осуществляется по максимальному значению полезного сигнала путем последовательного подключения к решающему устройству каждого из n приемников [3].
К недостаткам данного способа относятся:
1. Ограниченная дальность действия из-за низкой акустической чувствительности.
2. Недостаточная достоверность идентификации обнаруженных объектов даже по классам: «подводный»-«надводный».
3. Недостаточная точность при определении пространственных координат обнаруженных объектов (особенно высокоскоростных объектов).
4. Невозможность применения для обнаружения воздушных объектов (суда на воздушных подушках, гидросамолеты и др.).
5. Невозможность определения параметров морского волнения из-за использования только амплитудной модуляции.
Задача, которая решается изобретением, заключается в разработке способа, свободного от перечисленных выше недостатков.
Технический результат предложенного способа заключается в увеличении дальности действия, повышении достоверности идентификации обнаруженных объектов, повышение точности определения их пространственных координат, возможности применения для воздушных объектов, а также для определения параметров морского волнения.
Поставленная цель достигается тем, что в известном способе обнаружения, идентификации и определения пространственных координат объектов при всплытии ПА, заключающемся в формировании, усилении и излучении ВЧ сигнала накачки в водную среду на n частотах с помощью n излучателей, расположенных на одинаковом угловом расстоянии на корпусе ПА и ориентированных определенным образом в пространстве, излучается ВЧ сигнал накачки на n частотах водную среду, при этом базовая частота ВЧ сигнала накачки соответствует резонансной частоте ППС, затем этот сигнал, будучи промодулированным по амплитуде НЧ полезным сигналом, принимается с помощью n приемников, расположенных определенным образом на корпусе ПА, при этом направленность по приему формируется за счет волновых размеров каждого из n приемников и соответствующей ему частоты ВЧ сигнала накачки, из него выделяется НЧ полезный сигнал, а определение направления на источник НЧ гидроакустических излучений осуществляется по максимальному значению полезного сигнала путем последовательного подключения к решающему устройству каждого из n приемников, n излучателей и n приемников располагаются в НОК ПА, дополнительно в КОК ПА на одинаковом угловом расстоянии и ориентированные определенным образом в пространстве располагаются еще n излучателей и n приемников, идентичных тем, которые располагаются в НОК ПА, n излучатели и n приемники, расположенные в одной плоскости в НОК и КОК ПА, механически сканируют в соответствующей плоскости во всем секторе наблюдения, ВЧ сигнал накачки, излучаемый вверх, соответствует резонансной частоте ППС, ВЧ сигнал накачки, излучаемый вниз, соответствует резонансной частоте ДПС, ВЧ сигнал накачки, излучаемый вправо и влево от ПА, соответствует резонансной частоте ГПС, доминирующих на горизонте ПА, ВЧ сигнал накачки дополнительно модулирован по фазе (частоте) НЧ полезным сигналом, каждый из n приемников к решающему устройству дополнительно периодически подключается одновременно, для определения главного направления движения объекта дополнительно используется эффект Доплера, для определения координат объекта дополнительно используется триангуляционный способ.
Увеличение дальности действия способа достигается за счет повышения акустической чувствительности путем:
1. Повышения эффективности преобразования акустической энергии ВЧ волн накачки в акустическую энергию ВЧ волн комбинационных частот путем излучения ВЧ сигнала накачки на резонансных частотах рассеивателей звука, доминирующих в соответствующей области взаимодействия ВЧ волны накачки и НЧ полезного сигнала.
2. Путем механического сканирования n излучателей и n приемников, расположенных в одной плоскости в НОК и КОК ПА (т.е. суммирование НЧ полезного сигнала по каждой из характеристик направленности).
Повышение достоверности идентификации обнаруженных объектов достигается за счет:
1. Повышения эффективности преобразования акустической энергии ВЧ волн накачки в акустическую энергию ВЧ волн комбинационных частот.
2. Использования информации, содержащейся в форме спектров ВЧ волн комбинационных частот, а также в форме спектров НЧ полезного сигнала.
3. Использование информации только о водных лучах, принятых n приемниками, расположенными слева и справа по борту ПА - для идентификации подводных объектов и т.д.
4. Использование эффекта Доплера для оперативного распознавания скоростных объектов и т.д.
5. Использование информации о пространственных координатах, определенных триангуляционным методом и др.
Повышение точности при определении пространственных координат обнаруженных объектов достигается за счет того, что:
1. N излучатели и n приемники расположены в НОК и КОК ПА, что позволяет реализовать триангуляционный метод.
2. N излучатели и n приемники механически сканируют в соответствующей плоскости во всем секторе наблюдения, что повышает точность определения координат высокоскоростных объектов.
3. Повышается разрешающая способность по направлению и точность пеленгования объектов за счет более высокого соотношения сигнал/помеха, которое достигается:
- повышением эффективности преобразования акустической энергии ВЧ волн накачки в акустическую энергию ВЧ волн комбинационных частот;
- суммированием НЧ полезного сигнала по каждой из характеристик направленности путем механического сканирования n излучателей и n приемников, расположенных в одной плоскости в НОК и КОК ПА, и др.
Возможность применения для обнаружения воздушных объектов (суда на воздушных подушках, гидросамолеты и др.) достигается за счет того, что:
1. Повышается акустическая чувствительность.
2. N излучатели и n приемники расположены в самой носовой и самой кормовой оконечностях ПА.
3. N излучатели и n приемники механически сканируют в соответствующей плоскости во всем секторе наблюдения.
Возможность определения параметров морского волнения достигается за счет того, что:
1. Дополнительно используется фазовая (частотная) модуляция ВЧ сигнала накачки НЧ полезным сигналом.
2. Повышается акустическая чувствительность.
Отличительными от прототипа признаками способа являются:
1. N излучатели и n приемники расположены в НОК ПА.
2. В КОК ПА на одинаковом угловом расстоянии и ориентированные определенным образом в пространстве расположены дополнительные n излучатели и n приемники, идентичные тем, которые расположены в НОК ПА.
3. N излучатели и n приемники, расположенные в одной плоскости в НОК и КОК ПА, механически сканируют в соответствующей плоскости во всем секторе наблюдения.
4. ВЧ сигнал накачки, излучаемый вверх, соответствует резонансной частоте ППС, ВЧ сигнал накачки, излучаемый вниз, соответствует резонансной частоте ДПС, ВЧ сигнал накачки, излучаемый вправо и влево от ПА, соответствует резонансной частоте ГПС, доминирующих на горизонте ПА.
5. ВЧ сигнал накачки дополнительно модулирован по фазе (частоте) НЧ полезным сигналом.
6. Каждый из n приемников к решающему устройству дополнительно периодически подключается одновременно.
7. Для определения главного направления движения объекта дополнительно используется эффект Доплера.
8. Для определения координат объекта дополнительно используется триангуляционный способ.
Наличие отличительных от прототипа признаков позволяет сделать вывод о соответствии заявляемого способа критерию "новизна".
Анализ известных технических решений с целью обнаружения в них указанных отличительных признаков показал следующее.
Признаки 1-4 и 6 являются новыми. В то же время признаки 1 и 6 используются в прикладной гидроакустике.
Признаки 5, 7 и 8 являются известными в гидроакустике.
Таким образом, наличие новых существенных признаков, в совокупности с известными, обеспечивает появление у заявляемого решения нового свойства, не совпадающего со свойствами известных технических решений - обнаруживать ВО, НО и ПО на большом расстоянии от ПА, с высокой достоверностью идентифицировать обнаруженные объекты, с высокой точностью определять их пространственные координаты, а также определять параметры морского волнения.
В данном случае мы имеем новую совокупность признаков и их новую взаимосвязь, причем не простое объединение новых признаков и уже известных в гидроакустике, а именно выполнение операций в предложенной последовательности и приводит к качественно новому эффекту.
Данное обстоятельство позволяет сделать вывод о соответствии разработанного способа критерию "существенные отличия".
На фиг.1 представлена функциональная схема устройства, с помощью которой реализуется разработанный способ обнаружения, идентификации и определения пространственных координат ВО, НО и ПО, а также параметров морского волнения при плавании ПА и всплытии его на поверхность моря.
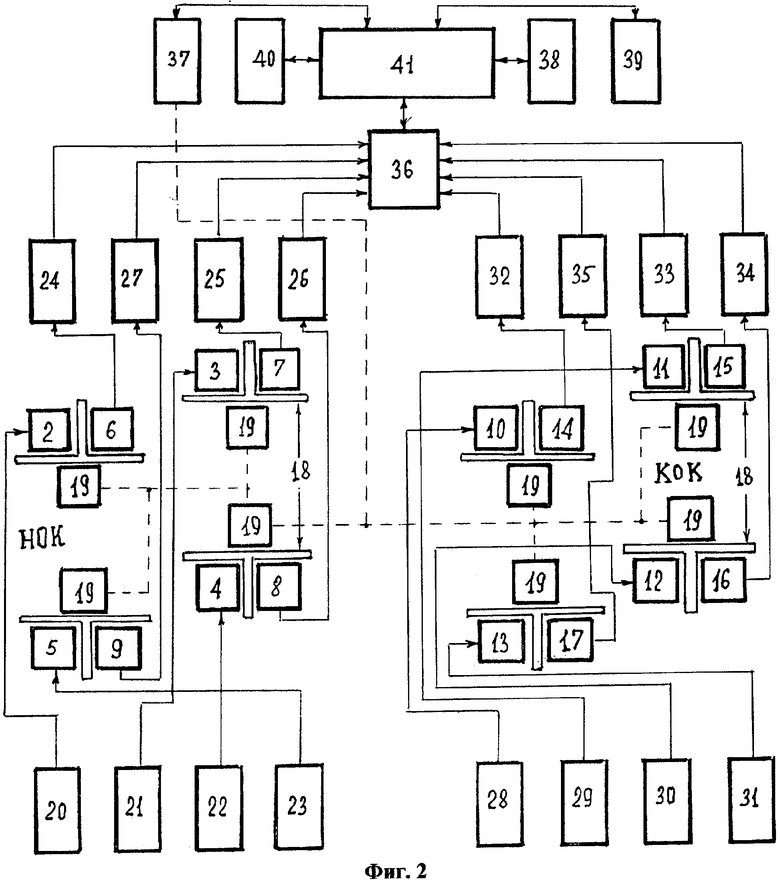
На фиг.2 представлена структурная схема устройства, с помощью которого реализуется разработанный способ. Устройство содержит ПА (1), n излучателей (2-5) ВЧ сигнала накачки и n приемников (6-9) ВЧ сигнала накачки, расположенных на корпусе ПА (1) на одинаковом угловом расстоянии в НОК ПА и ориентированных определенным образом в пространстве (излучатель 2 - в сторону поверхности моря, излучатель 3 - вправо от ПА, излучатель 4 - влево от ПА, излучатель 5 - в направлении дна моря). Излучатель ВЧ сигнала накачки и соответствующий ему приемник ВЧ сигнала накачки объединены в одну акустическую систему: 2-6, 3-7, 4-8 и 5-9.
Устройство содержит n излучателей (10-13) ВЧ сигнала накачки и n приемников (14-17) ВЧ сигнала накачки, расположенных на корпусе ПА (1) на одинаковом угловом расстоянии в КОК ПА и ориентированных определенным образом в пространстве (излучатель 10 - в сторону поверхности моря, излучатель 11 - вправо от ПА, излучатель 12 - влево от ПА, излучатель 13 - в направлении дна моря). Излучатель ВЧ сигнала накачки и соответствующий ему приемник ВЧ сигнала накачки объединены в одну акустическую систему: 10-14, 11-15, 12-16 и 13-17.
Каждая акустическая система (2-6, 10-14 и т.д.) расположена на своей технической площадке (18), которая имеет поворотное устройство (19) для механического сканирования акустической системы в соответствующей плоскости во всем секторе наблюдения. При этом каждая техническая площадка (18) обеспечивает экранировку излучателя ВЧ сигнала накачки от приемника ВЧ сигнала накачки, а также всей акустической системы от корпуса ПА.
Вход каждого из n излучателей (2-5) акустических систем НОК подключен к выходу соответствующего блока (20-23) формирования и усиления излучаемого ВЧ сигнала накачки (2 к 20, 3 к 21 и т.д.), а выход каждого из n приемников (6-9) подключен к входу соответствующего блока (24-27) усиления и обработки принятого ВЧ сигнала накачки (6 к 24, 7 к 25 и т.д.). А вход каждого из n излучателей (10-13) акустических систем КОК подключен к выходу соответствующего блока (28-31) формирования и усиления излучаемого ВЧ сигнала накачки (10 к 28, 11 к 29 и т.д.), а выход каждого из n приемников (14-17) подключен к входу соответствующего блока (32-35) усиления и обработки принятого ВЧ сигнала накачки (14 к 32, 15 к 33 и т.д.).
Устройство содержит коммутатор (36) последовательно-параллельного подключения блоков усиления и обработки принятого ВЧ сигнала накачки (6-9, 14-17), блок (37) управления работой поворотных устройств (19), блок (38) хранения эталонных сигналов ВО, НО и ПО, блок (39) хранения гидролого-акустических характеристик морской среды в районе плавания ПА, блок (40) определения пространственных координат ВО, НО и ПО триангуляционным способом, а также решающее устройство (41).
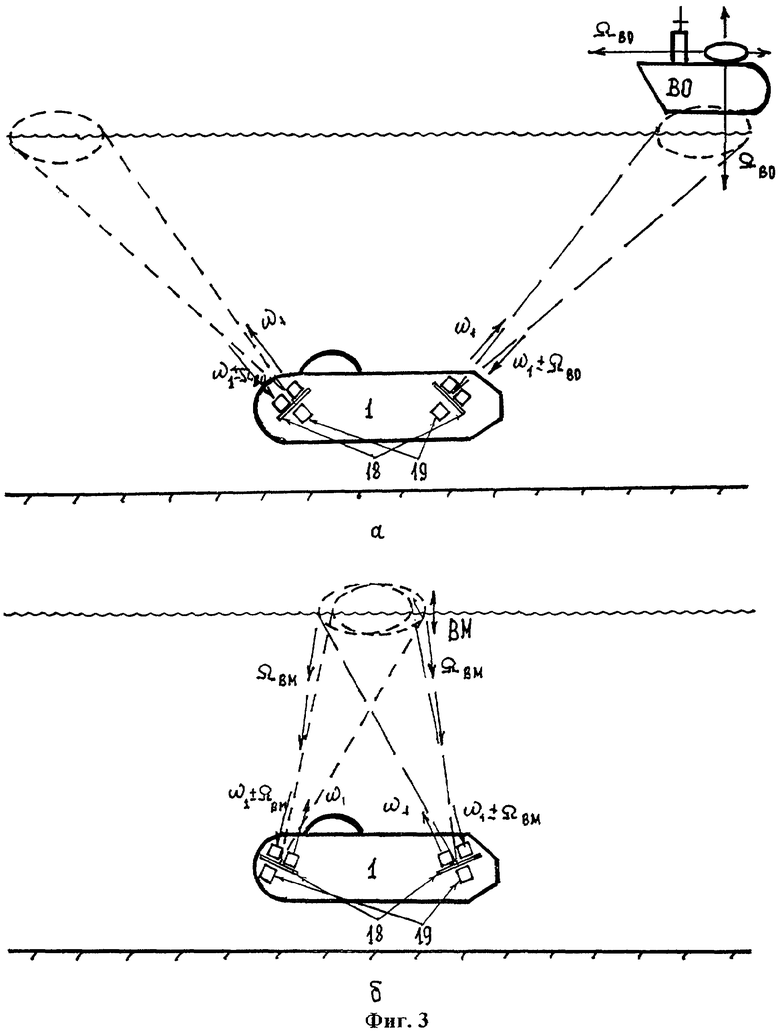
На фиг.3, для примера, представлена функциональная схема устройства, с помощью которого реализуется разработанный способ при обнаружении ВО (фиг.3а) и при определении параметров морского волнения (фиг.3б).
Устройство функционирует следующим образом (фиг.1-фиг.3).
ПА (1) совершает плавание в море с ППС, наличие которого обусловлено перемешиванием верхнего слоя воды под воздействием ветрового волнения, ГПС, наличие которого обусловлено жизнедеятельностью морских биологических объектов, а также ДПС, наличие которого обусловлено физическими процессами в земной коре и жизнедеятельностью морских биологических объектов на дне моря.
В районе плавания встречаются ВО, НО и ПО. Однако, для примера, наибольшую опасность для безопасности всплытия ПА (1) представляют ВО (например, быстроходные суда на воздушной подушке). В этом случае, перед всплытием ПА на поверхность моря, акустические системы НОК и КОК ПА с помощью (19) ориентированы в пространстве таким образом, чтобы по направлениям «справа», «слева» и «вниз» обеспечивалась максимальная акустическая чувствительность: ХН соответствующих акустических систем НОК и КОК ПА полностью перекрывались в заданной плоскости, а по направлению «верх» обеспечивалась максимальная площадь поиска ВО ХН соответствующих акустических систем были максимально разведены в противоположные стороны.
В блоках (20-23), а также (28-31) производится формирование и усиление до необходимого уровня ВЧ сигналов накачки на частотах: ω1 (блоки 20 и 28), соответствующей резонансной частоте ППС; ω2 (блоки 21 и 29), соответствующей резонансной частоте ГПС; ω3=2ω2 (блоки 22 и 30), соответствующей второй гармонике резонансной частоты ГПС, и ω4 (блоки 23 и 31), соответствующей резонансной частоте ДПС, а с помощью соответствующих излучателей (2-5 и 10-14) ВЧ сигнала накачки, расположенных на корпусе ПА (1) на одинаковом угловом расстоянии в НОК и КОК соответственно, а также ориентированных определенным образом в пространстве (излучатели 2 и 10 - в сторону поверхности моря, излучатели 3 и 11 - вправо от ПА, излучатели 4 и 12 - влево от ПА, излучатели 5 и 13 - в направлении дна моря) их направленное излучение в неоднородную морскую среду.
Рассеиваясь на неоднородностях морской среды (ППС, ГПС и ДПС), ВЧ сигнал накачки на частотах ω1, ω2, ω3 и ω4 модулируется по амплитуде и фазе (частоте) соответствующим НЧ полезным сигналом: Ωво - при наличии ВО, Ωно - при наличии НО, Ωпо - при наличии ПО и Ωвм - при наличии волнения моря. При этом образуются различные комбинационные частоты ωi± Ωj.
Например, для ω1 (при наличии ВО, НО, ПО сверху ПА и волнения моря): ω1± Ωво, ω1± Ωно, ω1± Ωпо и ω1± Ωвм.
С помощью n приемников (6-9 и 14-17) ВЧ сигнала накачки, расположенных на корпусе ПА (1) на одинаковом угловом расстоянии в НОК и КОК соответственно, а также ориентированных определенным образом в пространстве (приемники 6 и 14 - в сторону поверхности моря, приемники 7 и 15 - вправо от ПА, приемники 8 и 16 - влево от ПА, приемники 9 и 17 - в направлении дна моря), осуществляется направленный прием ВЧ сигнала накачки, рассеянного от различных (ППС, ГПС и ДПС) неоднородностей морской среды. При наличии ВО, НО, ПО и волнения моря ВЧ сигнал накачки модулируется по амплитуде и фазе (частоте) соответствующим НЧ полезным сигналом. Например, для ω1 (ПО сверху ПА): ω1± Ωво, ω1± Ωно, ω1± Ωпо и ω1± Ωвм.
С помощью коммутатора (36) осуществляется последовательно-параллельное подключение n приемников (6-9 и 14-17) ВЧ сигнала накачки к соответствующим блокам (24-27 и 32-35) усиления и обработки принятого ВЧ сигнала накачки, в которых осуществляется выделение НЧ полезного сигнала Ωj из ВЧ сигнала накачки ωi методом амплитудной и фазовой (частотной) демодуляции. Далее НЧ полезный сигнал Ωj с выходов блоков (24-27 и 32-35) усиления и обработки принятого ВЧ сигнала накачки поступает на соответствующий вход решающего устройства (41).
В зависимости от складывающейся обстановки (например, для слежения за быстро перемещающимся ВО и т.д.) с выхода решающего устройства сигнал управления подается на блок (37) управления работой поворотных устройств (19), и соответствующие акустические системы поворачиваются на необходимый угол в заданной плоскости. При этом:
- обнаружение объекта (ВО, НО и ПО) осуществляется по превышению сигнала над некоторым пороговым уровнем, выставленным заранее;
- определение направления на обнаруженный объект (ВО, НО и ПО) осуществляется по максимальному значению полезного сигнала, с учетом информации о гидролого-акустических характеристик морской среды в районе плавания ПА, находящейся в блоке (39), и др.;
- определение направления движения обнаруженного объекта (ВО, НО и ПО) по отношению к ПА (сближение, удаление, движение на постоянной дистанции и т.д.) осуществляется по известному в акустике эффекту Доплера др.;
- оперативная оценка класса обнаруженного объекта (ВО, НО и ПО) осуществляется по форме спектра принятого ВЧ сигнала накачки (ВО - «треугольник» с вершиной вверх от ВЧ сигнала, НО - «полочка» в области ВЧ сигнала, ПО - «треугольник» с прилегающей стороной к ВЧ сигналу) на входе блоков (24-27 и 32-35) усиления и обработки принятого ВЧ сигнала накачки; по ожидаемой дальности обнаружения объекта; по информации, поступающей из блока (40) определения дистанции триангуляционным способом и др.;
- идентификация обнаруженных объектов: определение классов (ВО, НО и ПО), подклассов (ВО: гидросамолет, судно на воздушной подушке и т.д.) и самих объектов (с конкретным бортовым номером) осуществляется в решающем устройстве (41) методом сравнения с эталонными сигналами, хранящимися в блоке (38) хранения эталонных сигналов ВО, НО и ПО; по ожидаемой дальности обнаружения объектов; по информации, поступающей из блока (40) определения дистанции триангуляционным способом и др.;
- определение пространственных координат обнаруженного объекта (ВО, НО и ПО) осуществляется по: направлению на него, ожидаемой дальности его обнаружения в данных гидролого-акустических условиях, соотношению сигнал-помеха на выходе соответствующего блока усиления и обработки ВЧ сигнала накачки, информации от блока (40) определения пространственных координат ВО, НО и ПО триангуляционным способом и др.
При этом в решающее устройство (41) постоянно поступают данные о вновь обнаруженных сигналах ВО, НО и ПО, гидролого-акустических условиях и волнении моря в данном географическом районе и др. (т.е. решающее устройство является адаптивной системой - приспосабливается к изменяющимся внешним условиям, а при принятии решения учитывает текущие параметры окружающей среды, а также самообучающей системой - постоянно совершенствует алгоритм принятия решения).
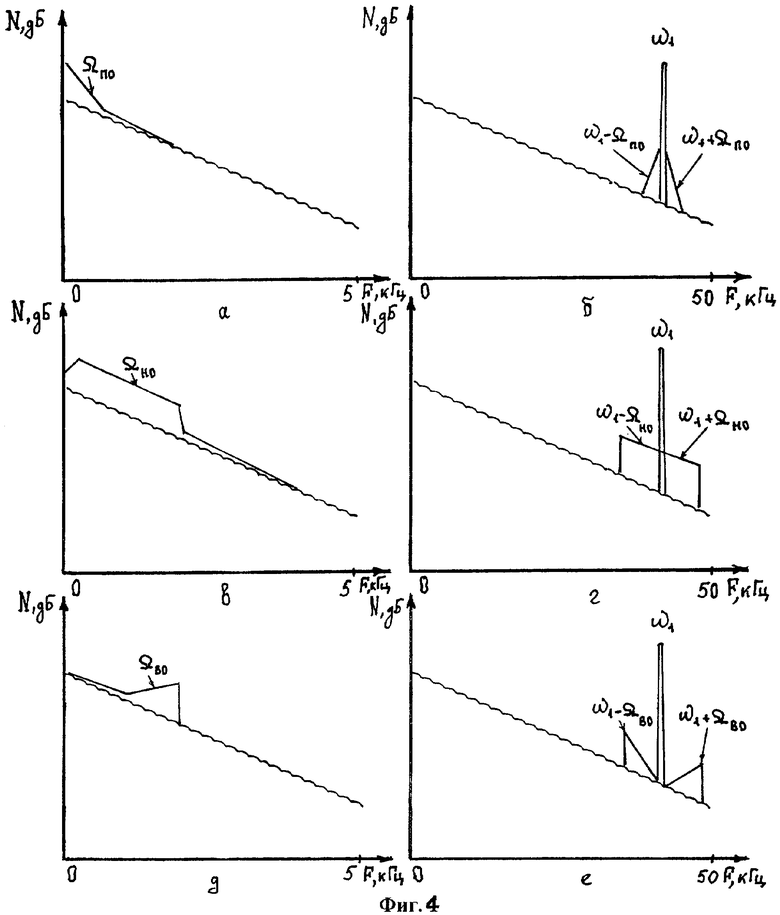
На фиг.4 представлены типовые спектрограммы сигналов от ПО (фиг.4а), НО (фиг.4в) и ВО (фиг.4д), которые регистрируются на выходе блока усиления и обработки ВЧ сигналов накачки. Как видно из фиг.4, формы спектров сигналов от ПО, НО и ВО даже визуально существенно отличаются друг от друга. При этом в спектре сигнала от ПО преобладают НЧ составляющие (форма сигнала «Треугольник с тупым углом»), в спектре сигнала от НО НЧ и ВЧ составляющие распределены приблизительно одинаково (форма сигнала «Прямоугольник»), а в спектре сигнала от ВО преобладают ВЧ составляющие (форма сигнала «Треугольник с острым углом»).
На фиг.4 также представлены типовые спектрограммы сигналов от ПО (фиг.4б), НО (фиг.4г) и ВО (фиг.4е), которые регистрируются уже на входе блока усиления и обработки ВЧ сигналов накачки. Как видно из фиг.4, форма спектров сигналов от ПО, НО и ВО даже без всякой обработки ВЧ сигнала накачки также существенно отличаются друг от друга. При этом в спектре ВЧ сигнала накачки при наличии ПО преобладают модуляционные составляющие близкие по частоте к ВЧ сигналу накачки (форма сигнала «Треугольник, в вершине которого ВЧ сигнал накачки»), при наличии НО модуляционные составляющие сосредоточены в более широком спектре частот (форма сигнала «Прямоугольник, в центре которого ВЧ сигнал накачки»), а при наличии ВО преобладают модуляционные составляющие, существенно отличающиеся по частоте от ВЧ сигнала накачки (форма сигнала «Треугольники, в основании которых ВЧ сигнал накачки»).
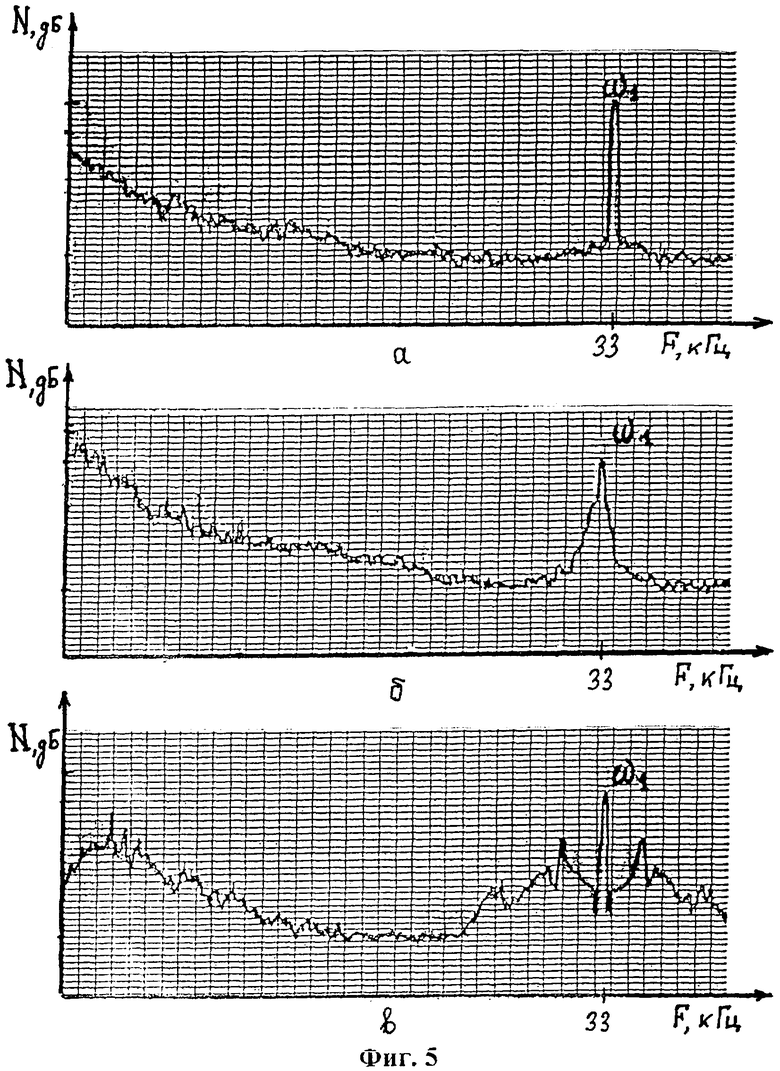
На фиг.5, для примера, представлены реальные спектрограммы ВЧ сигнала накачки (ω1=33 кГц, зарегистрированные на входе блока усиления и обработки ВЧ сигнала накачки при отсутствии ВО, НО и ПО (фиг.5а), а также при наличии ПО (фиг.5б) и при наличии ВО (фиг.5в).
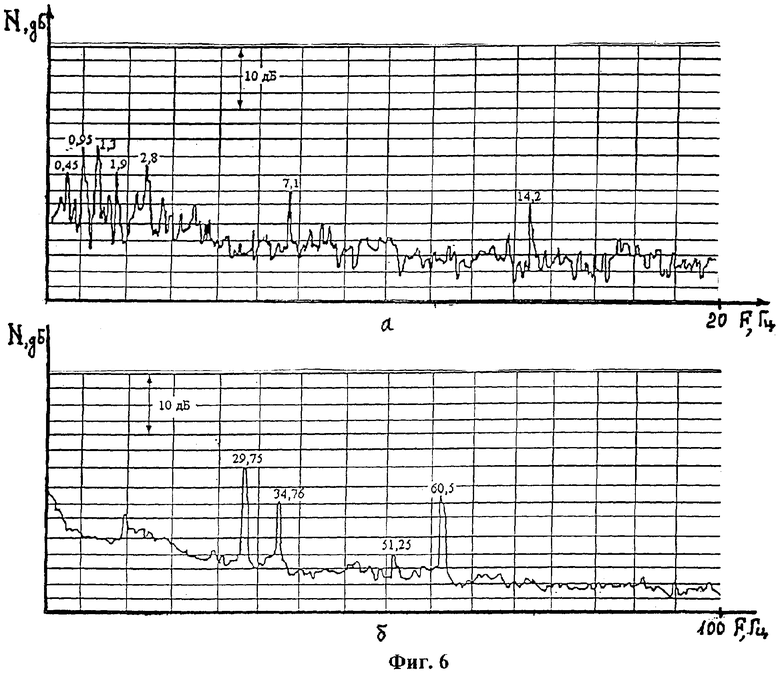
На фиг.6 представлены спектрограммы сигналов от ПО, зарегистрированные на выходе блока усиления и обработки ВЧ сигнала накачки и иллюстрирующие сигналы вально-лопастного звукоряда ПО (фиг.6а) и его некоторых механизмов (фиг.6б). Как видно из фиг.6а, при реализации разработанного способа удается регистрировать сигналы в диапазоне частот от долей Гц (в частности, 0,45 Гц на фиг.6а), в то время как у ближайшего аналога только выше 33-35 Гц [3].
На фиг.7 иллюстрируется внешний вид некоторых блоков, реализующих разработанный способ.
При проведении морских испытаний [4] использовалась параметрическая приемная антенная решетка (ППАР), состоящая из восьми пар ВЧ гидроакустических преобразователей (ВЧ излучателей и ВЧ приемников) от станции МГ-7, имеющих в своей амплитудно-частотной характеристике несколько резонансов в диапазоне частот от 16,5 кГц до 198 кГц.
Увеличение дальности действия, по сравнению со способом-прототипом, достигнуто за счет повышения акустической чувствительности путем:
1. Повышения эффективности преобразования акустической энергии ВЧ волн накачки в акустическую энергию ВЧ волн комбинационных частот путем излучения ВЧ сигнала накачки на резонансных частотах рассеивателей звука, доминирующих в соответствующей области взаимодействия ВЧ волны накачки и НЧ полезного сигнала (ППС, ГПС и ДПС).
2. Механического сканирования n излучателей и n приемников, расположенных в одной плоскости в НОК и КОК ППАР (т.е. суммирование НЧ полезного сигнала по каждой из ХН).
Повышение достоверности идентификации обнаруженных объектов достигнуто за счет:
1. Повышения эффективности преобразования акустической энергии ВЧ волн накачки в акустическую энергию ВЧ волн комбинационных частот.
2. Использования информации, содержащейся в форме спектров ВЧ волн комбинационных частот, а также в форме спектров НЧ полезного сигнала.
3. Использование информации о НЧ сигнале, принятого только по водным лучам (траекториям распространения акустической энергии, не касающимся дна и поверхности моря), принятым n приемниками, расположенными слева и справа по борту ППАР - для оперативной идентификации ПО и т.д.
4. Использование эффекта Доплера (изменения частоты сигнала в зависимости от взаимных направлениях и скоростях движения объектов) для оперативного распознавания скоростных объектов, приближения опасного (в навигационном отношении) объекта и т.д.
5. Использование информации о пространственных координатах обнаруженного объекта, определенных триангуляционным методом и др.
Повышение точности при определении пространственных координат обнаруженных объектов достигнуто за счет того, что:
1. N излучатели и n приемники были расположены в НОК и КОК ППАР, что позволило реализовать триангуляционный метод определения координат.
2. N излучатели и n приемники механически сканировали в соответствующей плоскости во всем секторе наблюдения, что повысило точность определения координат высокоскоростных объектов.
3. Были повышены разрешающая способность по направлению и точность пеленгования объектов за счет более высокого соотношения сигнал/помеха, которое было достигнуто путем:
- повышения эффективности преобразования акустической энергии ВЧ волн накачки в акустическую энергию ВЧ волн комбинационных частот;
- суммирования НЧ полезного сигнала по каждой из ХН путем механического сканирования n излучателей и n приемников, расположенных в одной плоскости в НОК и КОК ППАР и др.
Возможность применения для обнаружения воздушных объектов (суда на воздушных подушках, гидросамолеты и др.) достигнута за счет того, что:
1. Была повышена акустическая чувствительность.
2. N излучатели и n приемники были расположены в НОК и КОК ППАР.
3. N излучатели и n приемники механически сканировали в соответствующей плоскости во всем секторе наблюдения.
Возможность определения параметров морского волнения достигнута за счет того, что:
1. Дополнительно использовалась фазовая (частотная) модуляция ВЧ сигнала накачки НЧ полезным сигналом.
2. Была повышена акустическая чувствительность.
Литература
1. Роберт Дж. Урик. Основы гидроакустики. - Л.: Судостроение, 1978, 445 с.
2. Патент США №3882444, кл. G01S 9/66, 1975.
3. Бахарев С.А. Патент РФ №2215304 по заявке №2002102298 от 25.01.02 г.
4. Бахарев С.А. и др. Исследования влияния гидрофизических параметров морской среды на акустическое поле в морской шельфовой зоне. Отчет о НИР «Акватория». - Минрыбхоз. - Владивосток. - Дальрыбвтуз, 1998, 167 с.
Изобретение относится к области гидроакустики и может быть использовано в подводных аппаратах (ПА) для обеспечения навигационной безопасности их мореплавания и всплытия на поверхность моря, в частности. Техническим результатом изобретения является увеличение дальности действия, повышение достоверности идентификации обнаруженных объектов, повышение точности определения их пространственных координат, возможность определения параметров морского волнения. В предложенном способе дальнее обнаружение, идентификация и определение пространственных координат объектов, а также параметров морского волнения осуществляется по информации, содержащейся в акустических высокочастотных (ВЧ) волнах накачки, излученных с ПА и рассеянных на приповерхностном пузырьковом слое, глубинном пузырьковом слое и донном пузырьковым слое, в акустических низкочастотных (НЧ) волнах, формируемых в процессе движения объектов, а также в ВЧ комбинационных волнах, образованных в неоднородной морской среде за счет нелинейного взаимодействия гидроакустических ВЧ волн накачки и НЧ акустических волн. 7 ил.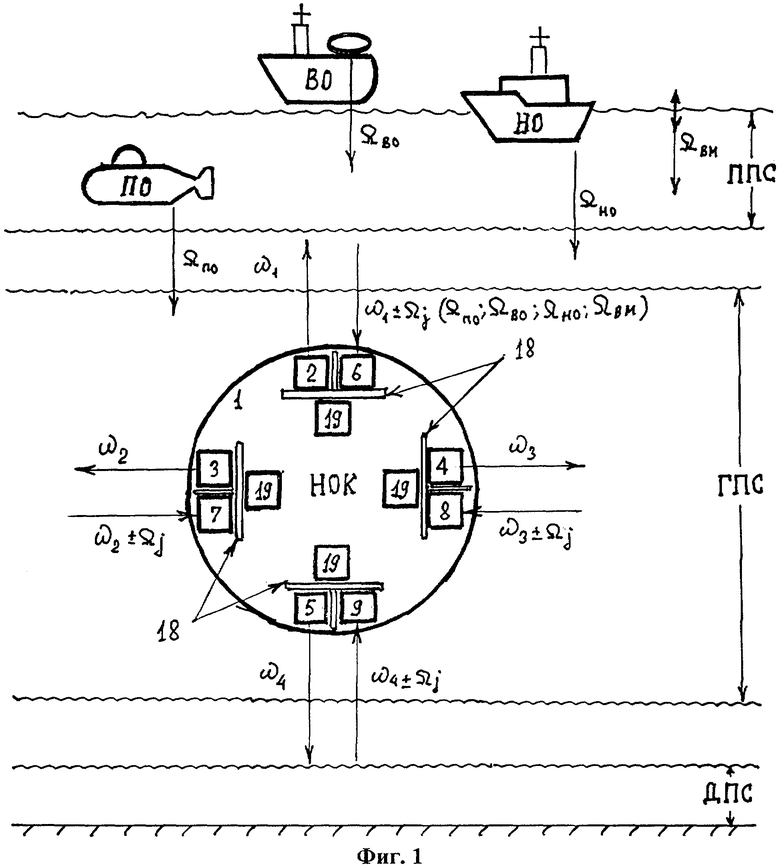
Способ обнаружения, идентификации и определения пространственных координат объектов при всплытии подводного аппарата, заключающийся в формировании, усилении и излучении высокочастотного сигнала накачки в водную среду на n частотах с помощью n излучателей, расположенных на одинаковом угловом расстоянии на корпусе подводного аппарата и ориентированных определенным образом в пространстве, излучается высокочастотный сигнал накачки на n частотах в водную среду, при этом базовая частота высокочастотного сигнала накачки соответствует резонансной частоте приповерхностного пузырькового слоя, затем этот сигнал, будучи промодулированным по амплитуде низкочастотным полезным сигналом, принимается с помощью n приемников, расположенных определенным образом на корпусе подводного аппарата, при этом направленность по приему формируется за счет волновых размеров каждого из n приемников и соответствующей ему частоты высокочастотного сигнала накачки, из него выделяется низкочастотный полезный сигнал, а определение направления на источник низкочастотных гидроакустических излучений осуществляется по максимальному значению полезного сигнала путем последовательного подключения к решающему устройству каждого из n приемников, отличающийся тем, что n излучателей и n приемников располагаются в самой носовой оконечности подводного аппарата, дополнительно в самой кормовой оконечности подводного аппарата на одинаковом угловом расстоянии и ориентированные определенным образом в пространстве располагаются еще n излучателей и n приемников, идентичных тем, которые располагаются в самой носовой оконечности подводного аппарата, n излучатели и n приемники, расположенные в одной плоскости в самой носовой и самой кормовой оконечностях подводного аппарата, механически сканируют в соответствующей плоскости во всем секторе наблюдения, сигнал накачки, излучаемый вверх, соответствует резонансной частоте приповерхностного пузырькового слоя, сигнал накачки, излучаемый вниз, соответствует резонансной частоте придонного звукорассеивающего слоя, сигнал накачки, излучаемый вправо и влево от подводного аппарата, соответствует резонансной частоте рассеивателей звука, доминирующих на горизонте подводного аппарата, сигнал накачки дополнительно модулирован по фазе (частоте) низкочастотным полезным сигналом, каждый из n приемников к решающему устройству дополнительно периодически подключается одновременно, для определения главного направления движения объекта дополнительно используется эффект Доплера, для определения координат объекта дополнительно используется триангуляционный способ.
| Устройство для передачи на расстояние показаний об изменении уровня воды в морских паровых котлах | 1931 |
|
SU24736A1 |
| ГИДРОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ, ДВИЖУЩИХСЯ С МАЛОЙ РАДИАЛЬНОЙ СКОРОСТЬЮ В КОНТРОЛИРУЕМОЙ АКВАТОРИИ, И ГИДРОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА, РЕАЛИЗУЮЩАЯ ЭТОТ СПОСОБ | 2002 |
|
RU2242021C2 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1978 |
|
RU713278C |
| US 5790474 А, 04.08.1998 | |||
| ЕР 0214525 А1, 18.03.1987. | |||

