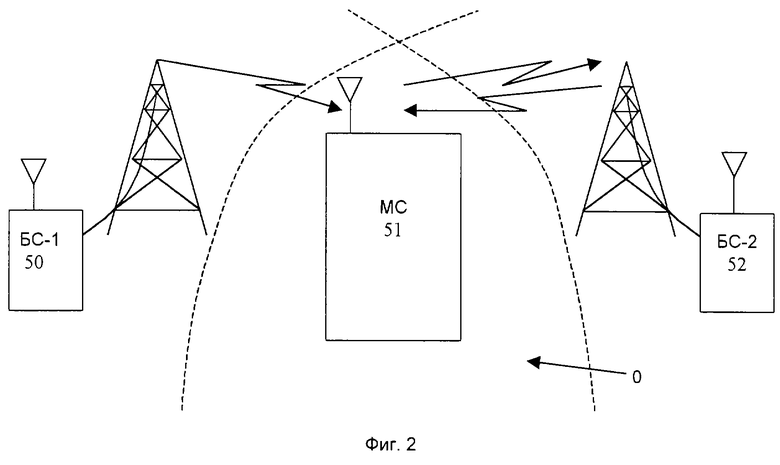
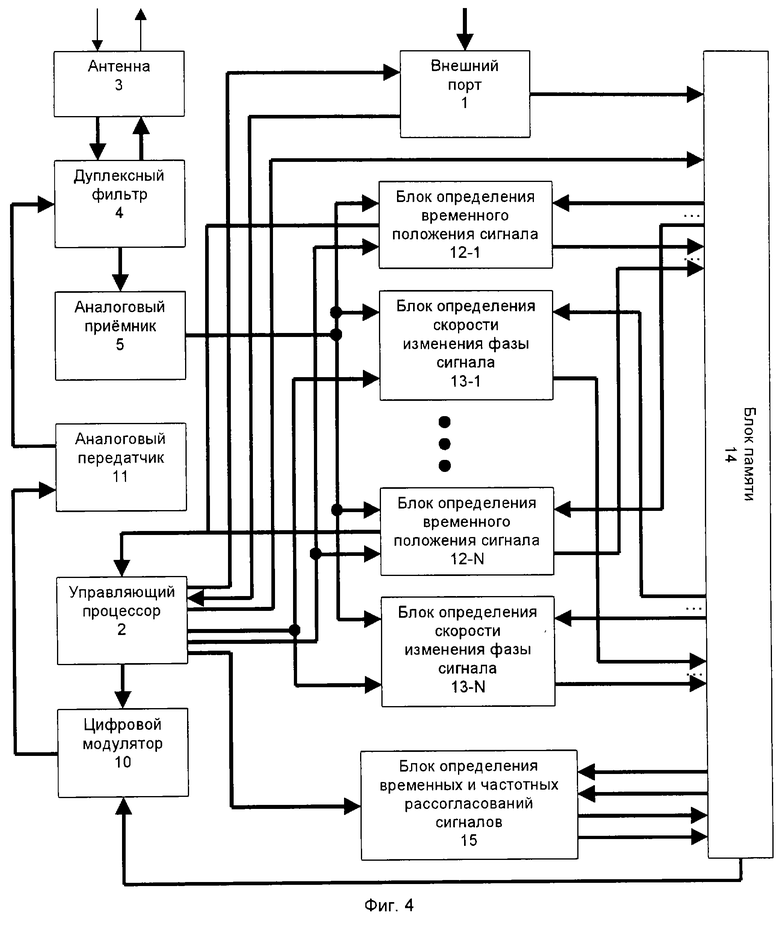
Изобретение относится к области радиотехники, в частности к способу и устройству определения временного и частотного рассогласования сигналов базовых станций и может использоваться в системах радиосвязи для синхронизации сигналов базовых станций. Технический результат заключается в повышении точности определения временного и частотного рассогласования сигналов базовых станций. Для этого размещают устройства определения временного и частотного рассогласования сигналов между N базовых станций таким образом, что есть прямые лучи от каждой из N базовых станций до устройства определения временного и частотного рассогласования сигналов, определяют временные позиции максимумов корреляционных функций с точностью, существенно превосходящей период дискретизации, достигаемой за счет использования оценок производных корреляционных функций, определяют разности частот несущих базовых станций с высокой точностью путем анализа приращений фазовых сдвигов и передачи полученного значения разности частот на одну из базовых станций. В устройство определения временного и частотного рассогласования сигналов базовых станций, содержащее внешний порт, управляющий процессор, антенну, дуплексный фильтр, аналоговый приемник, N узлов поиска сигнала, цифровой модулятор, аналоговый передатчик, согласно изобретению дополнительно введены N блоков определения временного положения сигнала, N блоков определения скорости изменения фазы сигнала, блок памяти и блок определения временных и частотных рассогласований сигналов. 2 с. и 2 з.п. ф-лы, 9 ил.
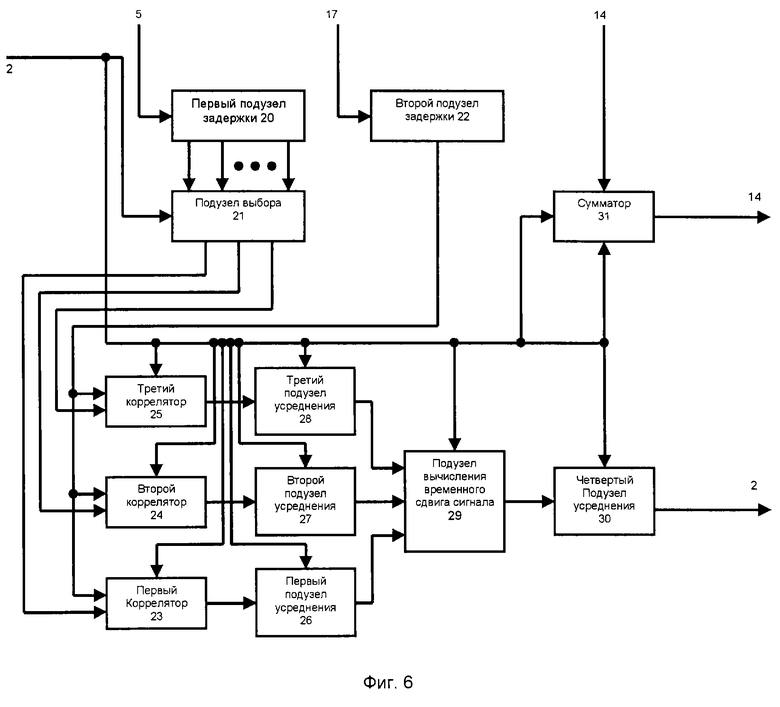
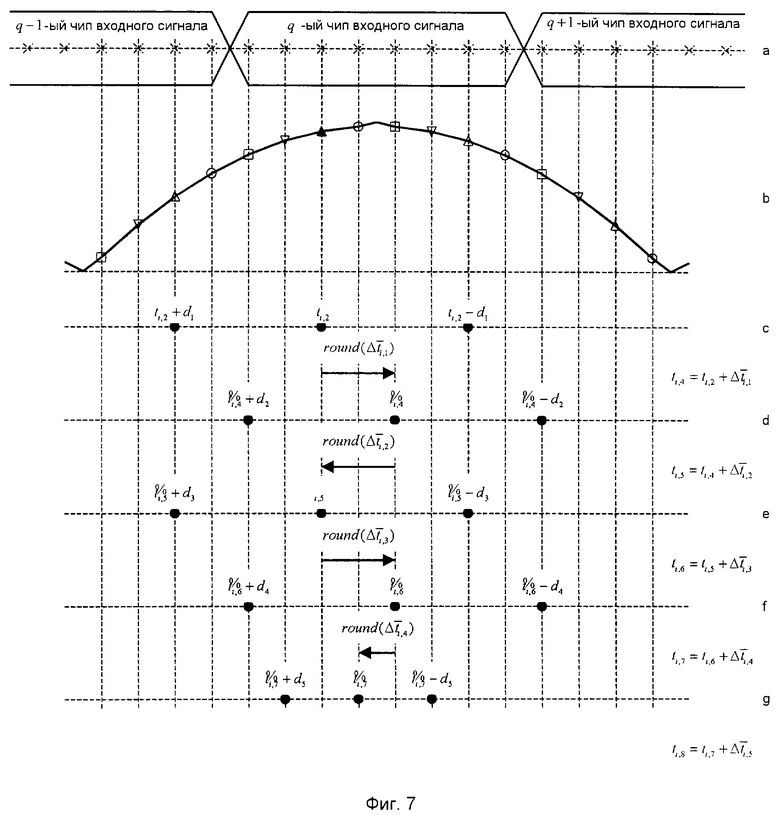
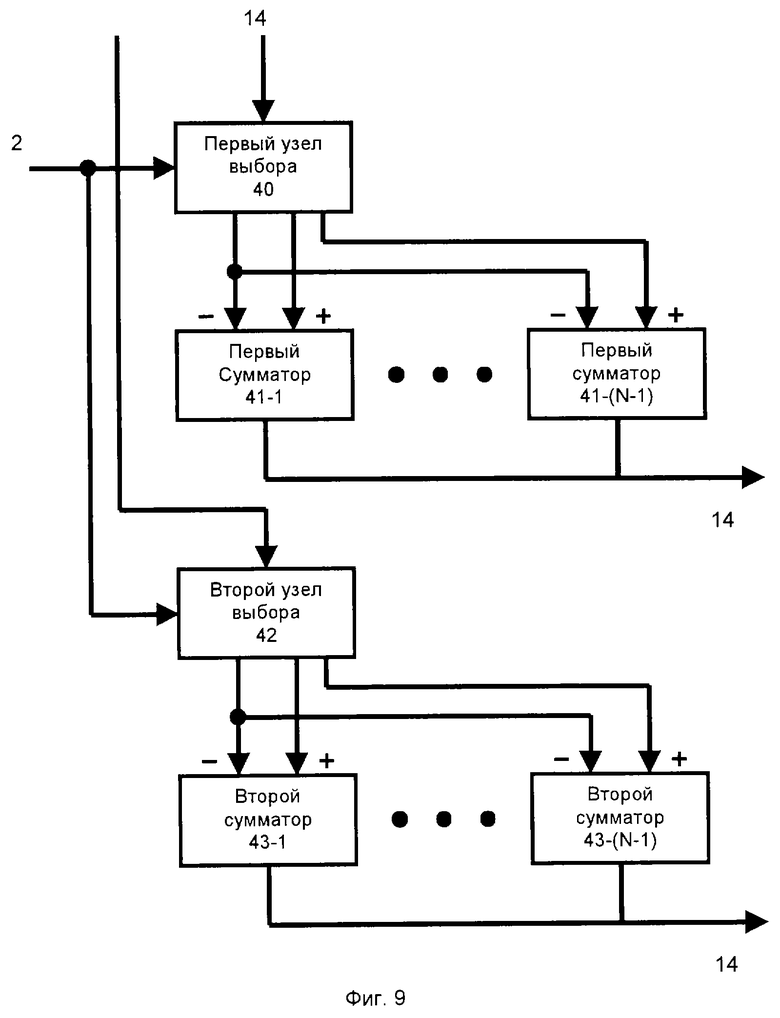
1. Способ определения временного и частотного рассогласования сигналов базовых станций, при котором размещают устройство определения временного и частотного рассогласования сигналов базовых станций между N базовых станций, где N принимает значения от 2 и более, определяют расстояние от каждой из N базовых станций до устройства определения временного и частотного рассогласования сигналов базовых станций, каждое значение определенного расстояния из N значений используют для вычисления времени на прямое распространение сигнала от соответствующей базовой станции до устройства определения временного и частотного рассогласования сигналов базовых станций, записывают идентификаторы N базовых станций в устройство определения временного и частотного рассогласования сигналов базовых станций, причем в качестве идентификатора i-й базовой станции, где i - номер базовой станции, принимающий значения от 1 до N, используют номер базовой станции в системе связи, начальный временной сдвиг ti,0 псевдослучайной последовательности (ПСП) базовой станции и время на прямое распространение сигнала от данной базовой станции до устройства определения временного и частотного рассогласования сигналов базовых станций ti,1 заключающийся в том, что посредством устройства определения временного и частотного рассогласования сигналов базовых станций осуществляют поиск сигнала первой базовой станции, при поиске используют записанный номер первой базовой станции, находят время задержки t1,2 сигнала первой базовой станции и значение текущего времени t1,3 первой базовой станции, отличающийся тем, что размещают устройство определения временного и частотного рассогласования сигналов базовых станций между N базовых станций таким образом, что есть прямые лучи от (устройство находится в пределах прямой видимости) каждой из N базовых станций до него, используют дополнительно номер ПСП базовой станции в качестве идентификатора каждой базовой станции, при поиске сигнала первой базовой станции дополнительно используют номер ПСП первой базовой станции и одновременно с поиском сигнала первой базовой станции осуществляют поиск сигналов остальных N-1 базовых станции, при этом используют записанные номера базовых станций и номера ПСП этих базовых станций, запоминают время задержки t1,2 сигнала первой базовой станции и значение текущего времени t1,3 первой базовой станции, находят и запоминают для каждой из N-1 базовых станций время задержки ti,2, ее сигнала и значение текущего времени ti,3, данной базовой станции, формируют для каждой из N базовых станций опорный сигнал с использованием номера ее ПСП и найденного значения времени задержки ti,2 ее сигнала, одновременно для каждой из N базовых станций уточняют время задержки ti,2 ее сигнала в Р последовательных этапов, где Р - целое число, большее или равное 1, по окончании Р-го этапа получают уточненное время задержки ti,P+3 сигнала данной базовой станции, причем, уточняя время задержки ti,2 сигнала данной базовой станции, на каждом из Р последовательных этапов используют сформированный для нее опорный сигнал, вычисляют для каждой из N базовых станций временное положение ti ее сигнала, при этом из найденного значения уточненного времени задержки ti,р+3, ее сигнала вычитают значение начального временного сдвига ti,0 ее ПСП и значение ti,1 времени на прямое распространение ее сигнала до устройства определения временного и частотного рассогласования сигналов базовых станций, полученную величину суммируют со значением текущего времени ti,3 данной базовой станции и запоминают вычисленное временное положение ti ее сигнала определяют для каждой базовой станции, кроме первой, временное рассогласование ее сигнала относительно сигнала первой базовой станции путем вычитания из значения временного положения ее сигнала tj, где j принимает значения от 2 до N, значения временного положения сигнала t1 первой базовой станции, полученные N-1 значений временных рассогласований сигналов N базовых станций запоминают, определяют одновременно для каждой из N базовой станции скорость изменения фазы ее сигнала Δfi время, равное длительности интервала квазикогерентности входного сигнала Т, при определении скорости изменения фазы сигнала данной базовой станции используют найденное значение уточненного времени задержки ее сигнала ti,P+3 определяют для каждой базовой станции, кроме первой, частотное рассогласование ее сигнала относительно сигнала первой базовой станции путем вычитания из значения скорости изменения фазы ее сигнала Δfj, где j принимает значения от 2 до N, значения скорости изменения фазы сигнала Δf1 первой базовой станции, полученные N-1 значений частотных рассогласований сигналов N базовых станций запоминают, передают полученные значения временных и частотных рассогласований сигналов N базовых станций на одну из этих базовых станций. 2. Способ по п. 1, отличающийся тем, что на каждом из Р последовательных этапов для каждой из N базовых станций осуществляют одновременное уточнение времени задержки ti,2 ее сигнала таким образом, что на р-м этапе, где р - номер текущего этапа, принимающий значения от 1 до Р, формируют оценку временного сдвига  положения максимума корреляционной функции сигнала данной базовой станции относительно найденного значения времени задержки ti,2 ее сигнала при значении р, равном 1, и относительно значения времени задержки ti,p+2 ее сигнала, найденного на предыдущем этапе, при значении р, большем 1, при этом вычисляют корреляцию входного сигнала с опорным сигналом данной базовой станции на L1•L2, где L1 равно 1 или более, L2 равно 1 или более, последовательных интервалах квазикогерентности входного сигнала, длительность каждого из которых равна Т, в трех временных позициях сигнала - центральной, задержанной и опережающей, значение центральной временной позиции сигнала при значении р, равном 1, равно найденному значению времени задержки ti,2 сигнала данной базовой станции, а при значении р, большем 1, равно значению времени задержки ti,p+2 сигнала данной базовой станции, найденному на предыдущем этапе, задержанная временная позиция сигнала задержана относительно центральной на временной сдвиг dp, опережающая временная позиция сигнала опережает центральную на временной сдвиг dp, получая значение корреляции в центральной временной позиции
положения максимума корреляционной функции сигнала данной базовой станции относительно найденного значения времени задержки ti,2 ее сигнала при значении р, равном 1, и относительно значения времени задержки ti,p+2 ее сигнала, найденного на предыдущем этапе, при значении р, большем 1, при этом вычисляют корреляцию входного сигнала с опорным сигналом данной базовой станции на L1•L2, где L1 равно 1 или более, L2 равно 1 или более, последовательных интервалах квазикогерентности входного сигнала, длительность каждого из которых равна Т, в трех временных позициях сигнала - центральной, задержанной и опережающей, значение центральной временной позиции сигнала при значении р, равном 1, равно найденному значению времени задержки ti,2 сигнала данной базовой станции, а при значении р, большем 1, равно значению времени задержки ti,p+2 сигнала данной базовой станции, найденному на предыдущем этапе, задержанная временная позиция сигнала задержана относительно центральной на временной сдвиг dp, опережающая временная позиция сигнала опережает центральную на временной сдвиг dp, получая значение корреляции в центральной временной позиции  значение корреляции в задержанной временной позиции
значение корреляции в задержанной временной позиции  и значение корреляции в опережающей временной позиции
и значение корреляции в опережающей временной позиции  , где l1 принимает значения от 1 до L1, l2 принимает значения от 1 до L2, причем временные сдвиги задержанной и опережающей временных позиций сигнала относительно центральной временной позиции сигнала на одном этапе равны между собой и одинаковы для всех базовых станций, а от этапа к этапу уменьшаются или не изменяются, усредняют полученные значения корреляций входного сигнала с опорным сигналом данной базовой станции
, где l1 принимает значения от 1 до L1, l2 принимает значения от 1 до L2, причем временные сдвиги задержанной и опережающей временных позиций сигнала относительно центральной временной позиции сигнала на одном этапе равны между собой и одинаковы для всех базовых станций, а от этапа к этапу уменьшаются или не изменяются, усредняют полученные значения корреляций входного сигнала с опорным сигналом данной базовой станции 
в задержанной, центральной и опережающей временных позициях сигнала соответственно, образуя накопления сигнала данной базовой станции 
в задержанной, центральной и опережающей временных позициях сигнала соответственно, находят L2 временных сдвигов  положения максимума корреляционной функции сигнала данной базовой станции относительно центральной временной позиции по формуле:
положения максимума корреляционной функции сигнала данной базовой станции относительно центральной временной позиции по формуле:

где 
разность между значениями накоплений сигнала данной базовой станции на р-м этапе в опережающей и центральной временных позициях сигнала;
разность между значениями накоплений сигнала данной базовой станции на р-м этапе в задержанной и центральной временных позициях сигнала,
усредняют найденные значения временных сдвигов  положения максимума корреляционной функции сигнала данной базовой станции, получая оценку временного сдвига
положения максимума корреляционной функции сигнала данной базовой станции, получая оценку временного сдвига  положения максимума корреляционной функции сигнала данной базовой станции, суммируют полученное значение оценки временного сдвига
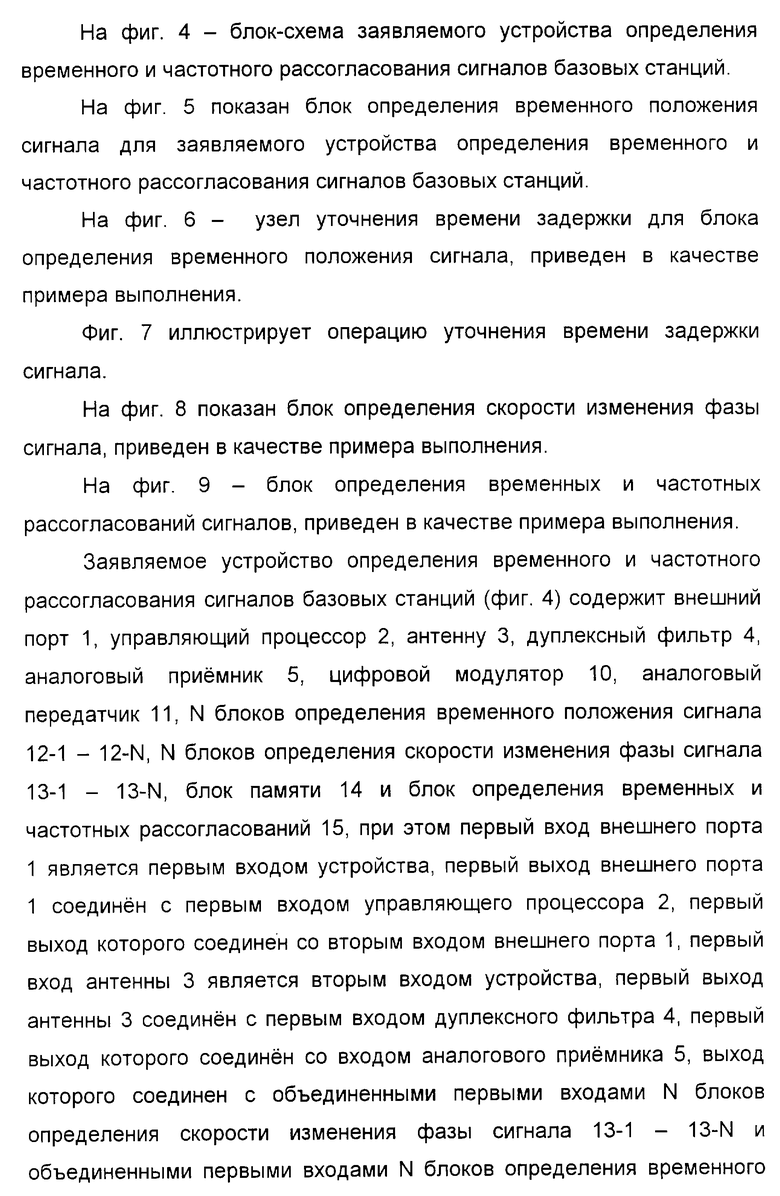
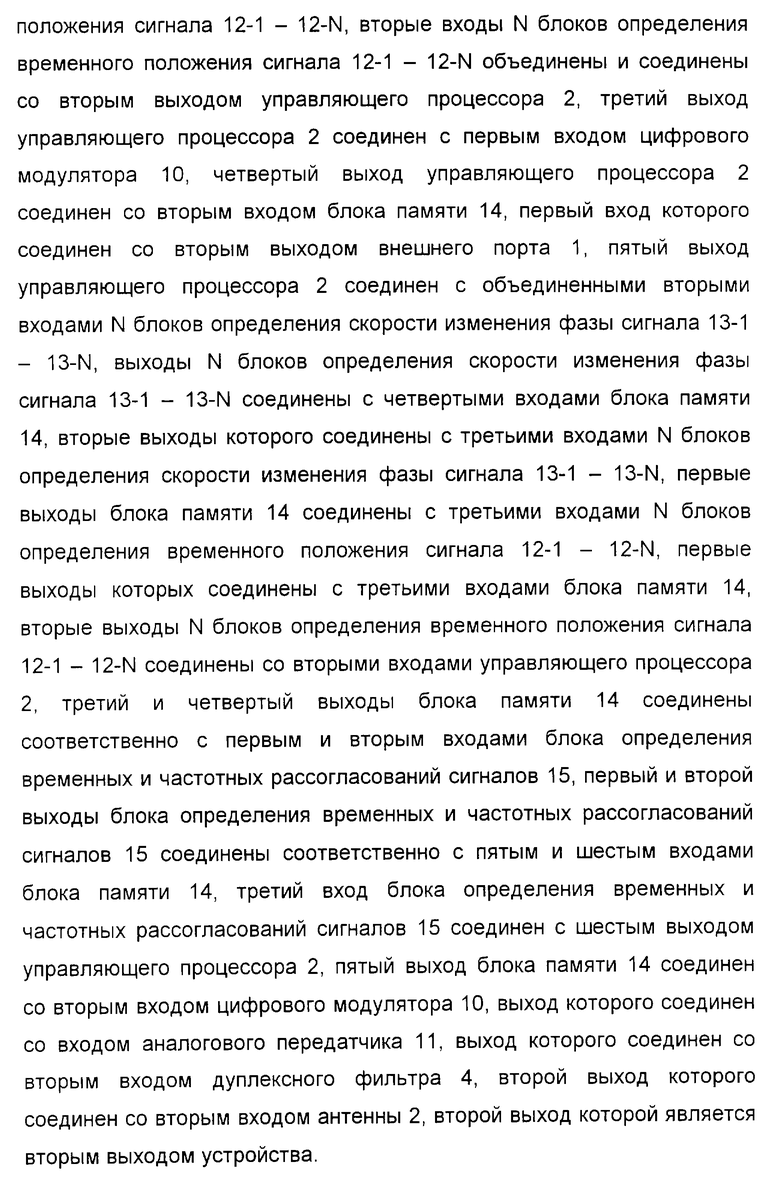
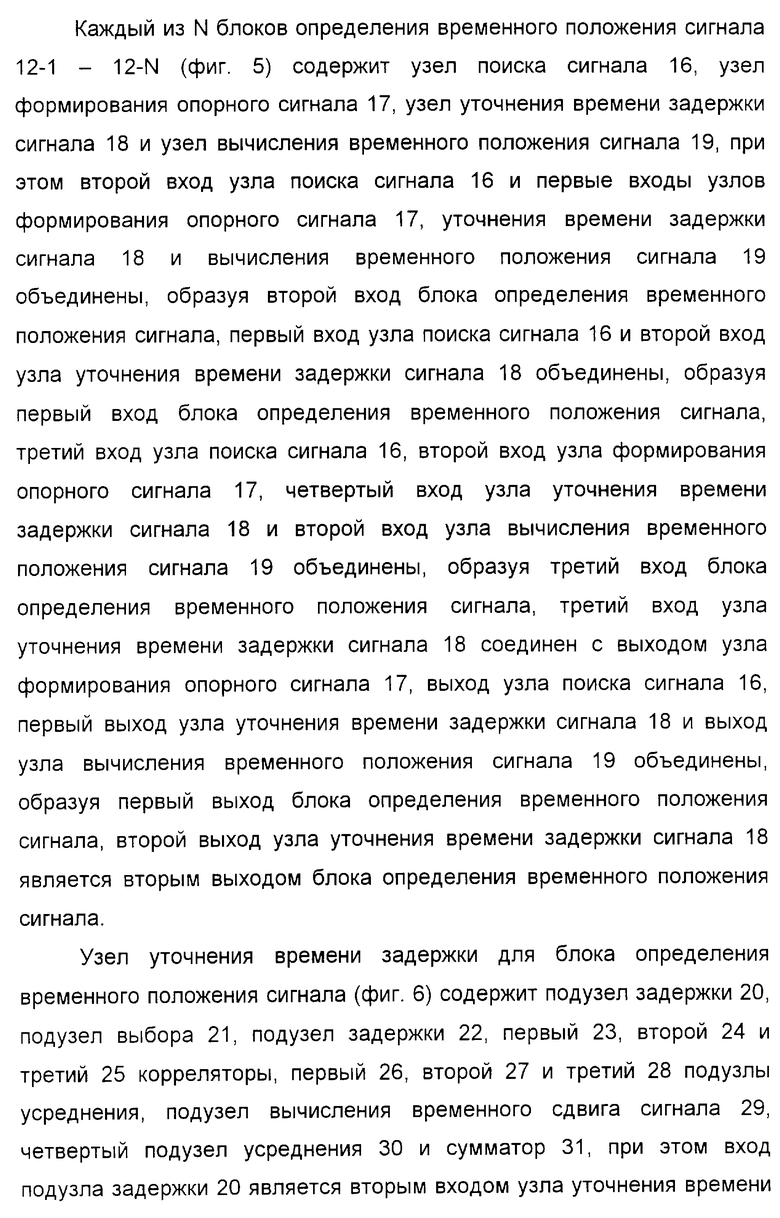
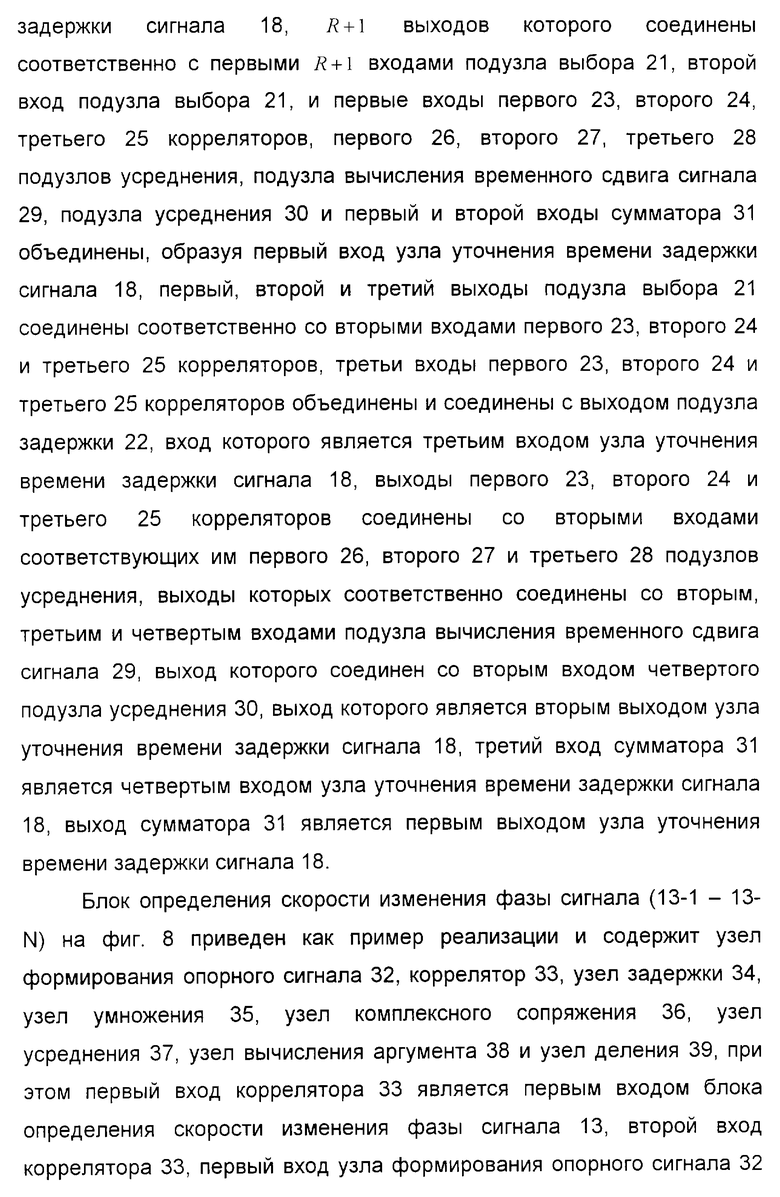
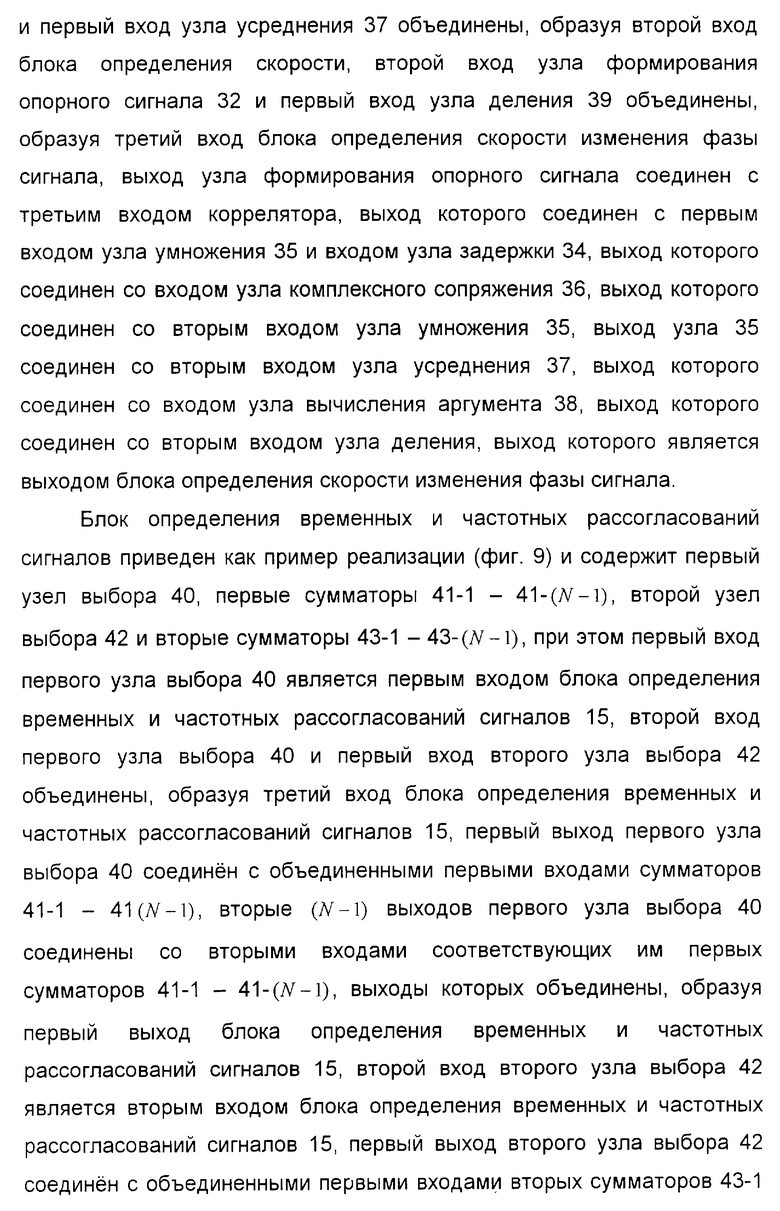
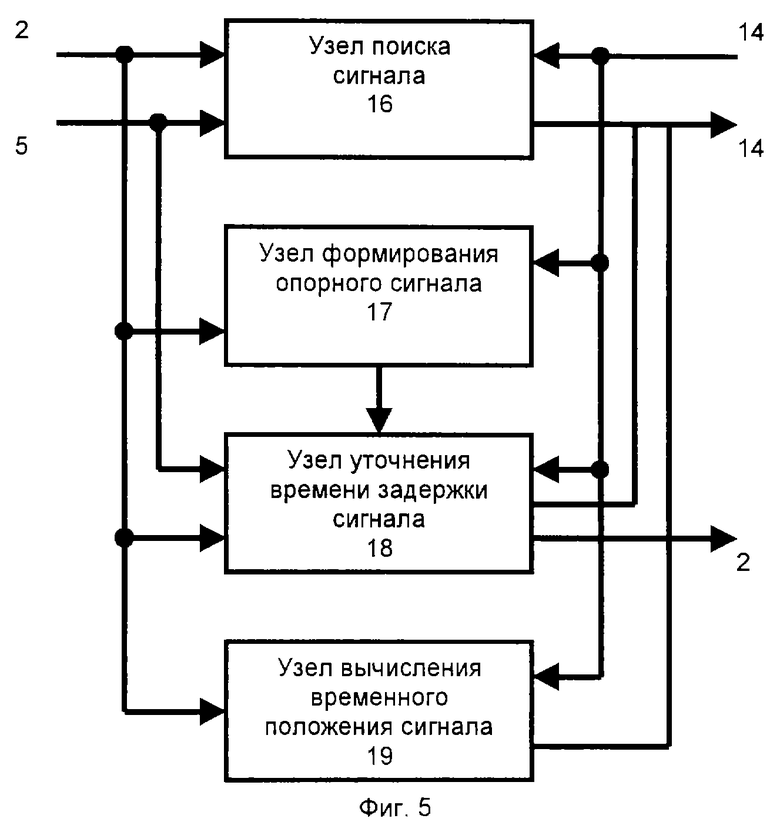
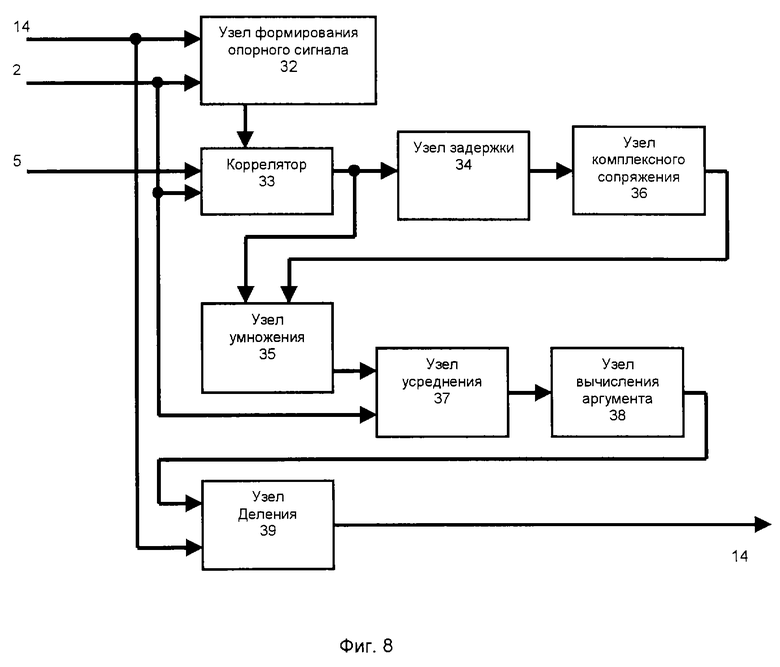
положения максимума корреляционной функции сигнала данной базовой станции, суммируют полученное значение оценки временного сдвига  и найденное значение времени задержки ti,2 при значении р, равном 1, или значение времени задержки ti,p+2, найденного на предыдущем этапе, при значении р, большем 1, получая время задержки ti,p+3 сигнала данной базовой станции на текущем этапе, причем, при достижении значения р значения Р, значение времени задержки ti,p+3 сигнала данной базовой станции на текущем этапе равно значению уточненного времени задержки ti,P+3 сигнала данной базовой станции. 3. Способ по п. 1, отличающийся тем, что скорость изменения фазы сигнала каждой базовой станции определяют путем формирования опорного сигнала для данной базовой станции с использованием номера ее ПСП и найденного значения уточненного времени задержки сигнала ti,P+3 вычисления корреляции входного сигнала и сформированного опорного сигнала данной базовой станции на L3, где L3 равно 1 или более, последовательных временных интервалах, каждый из которых представляет собой два смежных интервала квазикогерентности входного сигнала, длительность каждого из которых равна Т, получая L3 первых и L3 вторых значений корреляции, где первое значение корреляции вычисляют на раннем из смежных интервалов квазикогерентности, а второе значение корреляции - на позднем, вычисления комплексного сопряжения от L3 первых полученных значений корреляции, перемножения значений комплексного сопряжения от первых полученных значений корреляции и вторых полученных значений корреляции на каждом из L3, смежных интервалов и усреднения полученных значений, вычисления аргумента от величины усредненных полученных значений, получая среднее изменение фазы сигнала данной базовой станции, нахождения скорости изменения фазы сигнала данной базовой станции Δfi на интервале квазикогерентности сигнала Т, как отношение среднего изменения фазы сигнала. 4. Устройство определения временного и частотного рассогласования сигналов базовых станций, содержащее внешний порт, управляющий процессор, антенну, дуплексный фильтр, аналоговый приемник, N узлов поиска сигнала, цифровой модулятор, аналоговый передатчик, при этом первый вход внешнего порта является первым входом устройства, первый выход внешнего порта соединен с первым входом управляющего процессора, первый выход которого соединен со вторым входом внешнего порта, первый вход антенны является вторым входом устройства, первый выход антенны соединен с первым входом дуплексного фильтра, первый выход которого соединен со входом аналогового приемника, выход которого соединен с объединенными первыми входами N узлов поиска, второй вход первого узла поиска соединен со вторым выходом управляющего процессора, третий выход управляющего процессора соединен с первым входом цифрового модулятора, выход которого соединен со входом аналогового передатчика, выход которого соединен со вторым входом дуплексного фильтра, второй выход которого соединен со вторым входом антенны, второй выход которой является выходом устройства, отличающееся тем, что введены N блоков определения временного положения сигнала, N блоков определения скорости изменения фазы сигнала, блок памяти, блок определения временных и частотных рассогласований сигналов, при этом второй выход внешнего порта соединен с первым входом блока памяти, второй вход которого соединен с четвертым выходом управляющего процессора, N блоков определения временного положения сигнала выполнены таким образом, что каждый из них содержит, соответствующий ему из N, один узел поиска сигнала, первый и второй входы которого являются соответственно первым и вторым входами блока определения временного положения сигнала, дополнительно в N блоков определения временного положения сигнала введены узел формирования опорного сигнала, узел уточнения времени задержки сигнала и узел вычисления временного положения сигнала, первые входы которых объединены и присоединены соответственно ко второму входу узла поиска сигнала, второй вход узла уточнения времени задержки сигнала присоединен к первому входу узла поиска сигнала, выход узла формирования опорного сигнала соединен с третьим входом узла уточнения времени задержки сигнала, третий вход узла поиска сигнала, второй вход узла формирования опорного сигнала, четвертый вход узла уточнения времени задержки сигнала и второй вход узла вычисления временного положения сигнала объединены, образуя третий вход блока определения временного положения сигнала, выход узла поиска сигнала, первый выход узла уточнения времени задержки и выход узла вычисления временного положения сигнала объединены, образуя первый выход блока определения временного положения сигнала, второй выход узла уточнения времени задержки сигнала является вторым выходом блока определения временного положения сигнала, третьи входы N блоков определения временного положения сигнала соединены с первыми выходами блока памяти, первые входы блоков определения временного положения сигнала со второго по N объединены и присоединены ко второму входу первого блока определения временного положения сигнала, первые выходы N блоков определения временного положения сигнала соединены с третьими входами блока памяти, вторые выходы соединены со вторым входом управляющего процессора, пятый выход которого соединен со вторыми объединенными входами N блоков определения скорости изменения фазы сигнала, первые входы которых объединены и присоединены к первым входам N блоков определения временного положения сигнала, третьи входы N блоков определения скорости изменения фазы сигнала соединены со вторыми выходами блока памяти, выходы блоков определения скорости изменения фазы сигнала соединены с четвертыми входами блока памяти, третий и четвертый выходы которого соответственно соединены с первым и вторым входами блока определения временных и частотных рассогласований сигналов, третий вход которого соединен с шестым выходом управляющего процессора, а первый и второй выходы блока определения временных и частотных рассогласований сигналов соединены соответственно с пятым и шестым входами блока памяти, пятый выход которого соединен со вторым входом цифрового модулятора.
и найденное значение времени задержки ti,2 при значении р, равном 1, или значение времени задержки ti,p+2, найденного на предыдущем этапе, при значении р, большем 1, получая время задержки ti,p+3 сигнала данной базовой станции на текущем этапе, причем, при достижении значения р значения Р, значение времени задержки ti,p+3 сигнала данной базовой станции на текущем этапе равно значению уточненного времени задержки ti,P+3 сигнала данной базовой станции. 3. Способ по п. 1, отличающийся тем, что скорость изменения фазы сигнала каждой базовой станции определяют путем формирования опорного сигнала для данной базовой станции с использованием номера ее ПСП и найденного значения уточненного времени задержки сигнала ti,P+3 вычисления корреляции входного сигнала и сформированного опорного сигнала данной базовой станции на L3, где L3 равно 1 или более, последовательных временных интервалах, каждый из которых представляет собой два смежных интервала квазикогерентности входного сигнала, длительность каждого из которых равна Т, получая L3 первых и L3 вторых значений корреляции, где первое значение корреляции вычисляют на раннем из смежных интервалов квазикогерентности, а второе значение корреляции - на позднем, вычисления комплексного сопряжения от L3 первых полученных значений корреляции, перемножения значений комплексного сопряжения от первых полученных значений корреляции и вторых полученных значений корреляции на каждом из L3, смежных интервалов и усреднения полученных значений, вычисления аргумента от величины усредненных полученных значений, получая среднее изменение фазы сигнала данной базовой станции, нахождения скорости изменения фазы сигнала данной базовой станции Δfi на интервале квазикогерентности сигнала Т, как отношение среднего изменения фазы сигнала. 4. Устройство определения временного и частотного рассогласования сигналов базовых станций, содержащее внешний порт, управляющий процессор, антенну, дуплексный фильтр, аналоговый приемник, N узлов поиска сигнала, цифровой модулятор, аналоговый передатчик, при этом первый вход внешнего порта является первым входом устройства, первый выход внешнего порта соединен с первым входом управляющего процессора, первый выход которого соединен со вторым входом внешнего порта, первый вход антенны является вторым входом устройства, первый выход антенны соединен с первым входом дуплексного фильтра, первый выход которого соединен со входом аналогового приемника, выход которого соединен с объединенными первыми входами N узлов поиска, второй вход первого узла поиска соединен со вторым выходом управляющего процессора, третий выход управляющего процессора соединен с первым входом цифрового модулятора, выход которого соединен со входом аналогового передатчика, выход которого соединен со вторым входом дуплексного фильтра, второй выход которого соединен со вторым входом антенны, второй выход которой является выходом устройства, отличающееся тем, что введены N блоков определения временного положения сигнала, N блоков определения скорости изменения фазы сигнала, блок памяти, блок определения временных и частотных рассогласований сигналов, при этом второй выход внешнего порта соединен с первым входом блока памяти, второй вход которого соединен с четвертым выходом управляющего процессора, N блоков определения временного положения сигнала выполнены таким образом, что каждый из них содержит, соответствующий ему из N, один узел поиска сигнала, первый и второй входы которого являются соответственно первым и вторым входами блока определения временного положения сигнала, дополнительно в N блоков определения временного положения сигнала введены узел формирования опорного сигнала, узел уточнения времени задержки сигнала и узел вычисления временного положения сигнала, первые входы которых объединены и присоединены соответственно ко второму входу узла поиска сигнала, второй вход узла уточнения времени задержки сигнала присоединен к первому входу узла поиска сигнала, выход узла формирования опорного сигнала соединен с третьим входом узла уточнения времени задержки сигнала, третий вход узла поиска сигнала, второй вход узла формирования опорного сигнала, четвертый вход узла уточнения времени задержки сигнала и второй вход узла вычисления временного положения сигнала объединены, образуя третий вход блока определения временного положения сигнала, выход узла поиска сигнала, первый выход узла уточнения времени задержки и выход узла вычисления временного положения сигнала объединены, образуя первый выход блока определения временного положения сигнала, второй выход узла уточнения времени задержки сигнала является вторым выходом блока определения временного положения сигнала, третьи входы N блоков определения временного положения сигнала соединены с первыми выходами блока памяти, первые входы блоков определения временного положения сигнала со второго по N объединены и присоединены ко второму входу первого блока определения временного положения сигнала, первые выходы N блоков определения временного положения сигнала соединены с третьими входами блока памяти, вторые выходы соединены со вторым входом управляющего процессора, пятый выход которого соединен со вторыми объединенными входами N блоков определения скорости изменения фазы сигнала, первые входы которых объединены и присоединены к первым входам N блоков определения временного положения сигнала, третьи входы N блоков определения скорости изменения фазы сигнала соединены со вторыми выходами блока памяти, выходы блоков определения скорости изменения фазы сигнала соединены с четвертыми входами блока памяти, третий и четвертый выходы которого соответственно соединены с первым и вторым входами блока определения временных и частотных рассогласований сигналов, третий вход которого соединен с шестым выходом управляющего процессора, а первый и второй выходы блока определения временных и частотных рассогласований сигналов соединены соответственно с пятым и шестым входами блока памяти, пятый выход которого соединен со вторым входом цифрового модулятора.