Изобретение относится к области радиолокации и предназначено для определения местоположения работающей радиолокационной станции (РЛС) кругового обзора, например, судовой навигационной РЛС.
В настоящее время для некоторых измерительных комплексов (например, радионавигации, радиоразведки, комплексах радиоэлектронного подавления) актуальна задача оперативного определения дальности до цели и направления на нее, получаемых пассивной автономной угломерной системой с малыми габаритами (например, установленной на беспилотном летательном аппарате).
Известен способ пассивного определения дальности до цели с использованием сигнала обзорной сканирующей РЛС (см. 1. патент РФ на изобретение №2217772, МПК G01S 3/02, опубл. 02.11.2001). Сущность способа состоит в следующем. Измеряют разность азимутов приемной позиции и цели относительно РЛС, разность азимутов РЛС и цели относительно приемной позиции, разность расстояний РЛС - цель - приемная позиция, угол места цели β и угол места РЛС ϕ с помощью направленной антенны приемной позиции, при этом горизонтальная дальность до цели определяется по формуле:

Схема устройства для реализации данного способа состоит из антенны основной, антенны дополнительной, первого измерителя, второго измерителя, вычитателя, вычислителя, при этом выход основной антенны соединен одновременно с первым входом первого измерителя, второго измерителя, вычислителя и вычитателя, таким же образом выход дополнительной антенны соединен со вторым входом первого измерителя, второго измерителя и вычитателя, выход первого измерителя соединен со вторым входом вычислителя, выход второго измерителя соединен с третьим входом вычислителя, а выход вычитателя соединен с четвертым входом вычислителя, выход которого является выходом системы.
Способ реализуется следующим образом. Остронаправленный луч основной антенны направлен на цель. Эхосигналы поступают в первый и второй измерители. Антенна дополнительная направлена на излучающую РЛС. Прямые сигналы поступают в первый и второй измерители. В первом измерителе определяется разность расстояний т по задержке эхосигнала относительно прямого. В первом измерителе определяют задержку α - интервал времени между моментом приема пачки эхосигналов и моментом приема пачки прямых импульсов с учетом известного периода вращения антенны РЛС, который может быть измерен заранее. В вычитателе вычисляют угол γ - как разность азимутов антенны основной и антенны дополнительной. В вычислитель поступают значения τ, α, γ, а также углы места цели β и РЛС ϕ от антенны основной. В вычислителе определяют горизонтальную дальность цели R по формуле (1).
Данный способ может быть применим только при наличии дополнительной излучающей РЛС, что ограничивает функциональные возможности способа.
Известен способ определения местоположения источника излучения (ИРИ) с неизвестной несущей частотой (см. 2. Боков И.Г., Евдокимов О.Ю., Евдокимов Ю.Ф. Метод определения местоположения источников излучения с неизвестной несущей частотой. ТРТУ Специальный выпуск. №9, 2006, с. 22). Способ заключается в следующем. С борта летательного аппарата (ЛА) измеряется доплеровская частота сигнала по формуле:

где ν - скорость ЛА,
λ - длина волны источника радиоизлучения,
θ(t) - текущий угол между направлением движения ЛА и направлением на ИРИ, определяемый из выражения:

где D0 - дальность до ИРИ на начало измерений,
θ0 - начальный угол между направлением движения ЛА и направлением на ИРИ.
За счет разницы частоты ИРИ и опорных частот приемника эта частота измеряется с некоторой дополнительной постоянной составляющей Δƒ. Данная частота интегрируется на трех интервалах времени [t0, t1], [t0, t2], [t0, t3] в соответствии с формулой:

Уравнения (3) образуют систему, решая которую и используя уравнение (4), находят D0, θ0, Δƒ.
Данный способ применим только для определения местоположения когерентных источников радиоизлучения, тогда как большинство обзорных РЛС являются некогерентн ыми.
Известен способ (см. 3. патент США на изобретение №4882590, G01S 13/00, G01S 13/87, G01S 5/12, G01S 13/02, опубл. 21.11.1989 г.) определения дальности до цели по переотражениям от рельефа местности.
Способ состоит в следующем. Считается, что частота повторения импульсов, излучаемых передатчиком, постоянна. Примером такого передатчика может служить судовая радиолокационная станция, работающая в режиме кругового обзора. Приемное устройство способно разделять прямой сигнал передатчика и сигнал, переотраженный объектом, и измерять временное запаздывание τ переотраженного сигнала по отношению к прямому. Подсчитывая в точке приема количество импульсов, принятых между моментами приема прямого сиг нала по главному лепестку диаграммы направленности антенны за один период ее вращения (это количество импульсов обозначим N), и количество импульсов между моментами приема прямого и отраженного сигналов (обозначим это количество импульсов как n), можно определить угол поворота θ антенны РЛС от направления на приемник до направления на отражающий объект. Угол поворота антенны РЛС определяется выражением

Любая отражающая точка лежит на эллипсе, являющемся геометрическим местом точек, сумма расстояний от которых до точек нахождения передатчика и приемника равна R+δ, где δ=сτ; с - скорость распространения радиоволн; τ - разность времени прихода в точку приема прямого и переотраженного сигналов, R - расстояние между приемником и передатчиком. Соотношения между R, δ и х, у (координатами отражающего объекта) определяется уравнениями:

y=R-xctgθ
Из этих выражений можно найти координаты отражающего объекта через расстояние между приемником и передатчиком R, угол поворота θ антенны передатчика от направления на приемник до направления на отражающий объект, а также разность длин путей δ прямого и переотраженного сигналов:
Местность в районе приемного пункта «накрывают» координатной сеткой. Оценивают видимость каждого узла сетки на местности со стороны передатчика и приемника, и данные об отражающих объектах заносят в память компьютера. Компьютер сравнивает координаты х и у точки отражения, вычисленные по измеренной задержке τ, величине угла θ и предполагаемой дальности R с координатами реального отражающего объекта, заложенными в память компьютера. Подбирается такая величина R, чтобы рассчитанные координаты совпадали с координатами, заложенными в память компьютера. Подобным образом каждой отражающей точке, углу θ и временному запаздыванию τ ставится в соответствие местоположение источника радиосигнала на координатной сетке. Поскольку радиоконтрастных точек, от которых происходят отражения радиосигнала на местности, обычно несколько, местоположение передатчика в координатной сетке оценивается вероятностной величиной. Наиболее вероятная точка принимается за положение передатчика.
Устройство, реализующее данный способ, содержит каскадно соединенные антенну, приемное устройство, первый управляемый аналоговый вентиль, второй управляемый аналоговый вентиль, аналого-цифровой преобразователь, устройство памяти и компьютер, детектор максимума луча антенны РЛС, вход которого соединен с выходом приемного устройства, а выход - с управляемым входом первого управляемого аналогового вентиля, каскадно соединенные устройство выделения прямых сигналов РЛС, вход которого соединен с выходом первого управляемого логического вентиля, и счетчик временных интервалов, выход которого соединен с управляемым входом второго управляемого логического вентиля.
Для реализации данного способа необходима априорная информация о точных координатах радиоконтрастных элементов рельефа, что зачастую не осуществимо, а при определении дальности до РЛС, находящейся в море (корабельной РЛС), принципиально невозможно.
Известно устройство для определения местоположения работающей РЛС со сканирующей направленной антенной (см. 4. патент РФ на изобретение №2457505, МПК G01S 5/04, опубл. 27.07.2012). Способ, реализованный в данном устройстве, выбран в качестве прототипа.
Устройство содержит первую антенну 1, первое приемное устройство 2, вход которого подключен к выходу первой антенны 1, первый АЦП 3, устройство обнаружения сигналов 4, устройство 6 выделения прямых сигналов РЛС, счетчик 7 временных интервалов и устройство 8 памяти, и компьютер 9, вход которого соединен с выходом устройства 8 памяти, вторую антенну 10 и второе приемное устройство 11, вход которого соединен с выходом второй антенны 10, второй АЦП 12, содержащий два входа, первый из которых соединен с выходом второго приемного устройства 11, и один выход, генератор 5 тактовых импульсов, имеющий один выход, управляемый логический вентиль 13, имеющий два входа, первый из которых соединен с выходом счетчика 7 временных интервалов, второй - с выходом устройства 4 обнаружения сигналов, и один выход, моноимпульсный вычислитель пеленга 14, имеющий четыре входа, первый из которых соединен с выходом устройства обнаружения сигналов, второй и третий - с выходами первого и второго аналого-цифровых преобразователей, четвертый - с выходом генератора тактовых импульсов, и один выход, второй вход в первом аналого-цифровом преобразователе соединен с выходом генератора тактовых импульсов, а его первый вход соединен с выходом первого приемного устройства, второй и третий входы в устройстве обнаружения сигналов соединены соответственно с выходом второго аналого-цифрового преобразователя и выходом генератора тактовых импульсов, входы второй, третий и четвертый в устройстве памяти соединены соответственно с выходом устройства выделения прямых сигналов РЛС, выходом моноимпульсного вычислителя пеленга и выходом генератора тактовых импульсов, второй вход в устройстве выделения прямых сигналов соединен с выходом генератора тактовых импульсов, второй вход в счетчике временных интервалов соединен с выходом генератора тактовых импульсов, а его первый вход соединен с выходом устройства обнаружения сигналов, второй вход второго аналого-цифрового преобразователя соединен с выходом генератора тактовых импульсов, первый вход устройства обнаружения сигналов - с выходом первого аналого-цифрового преобразователя, первый вход устройства выделения прямых сигналов РЛС -с выходом моноимпульсного вычислителя пеленга, и первый вход устройства памяти - с выходом управляемого логического вентиля.
Структурная схема устройства приведена на фиг. 1, на которой обозначено:
1 - первая антенна;
2 - первое приемное устройство;
3 - первый аналого-цифровой преобразователь (АЦП);
4 - устройство обнаружения сигналов;
5 - генератор тактовых импульсов;
6 - устройство выделения прямых сигналов РЛС;
7 - счетчик временных интервалов;
8 - устройство памяти;
9 - компьютер;
10 - вторая антенна;
11 - второе приемное устройство;
12 - второй АЦП;
13 - управляемый логический вентиль;
14 - моноимпульсный вычислитель пеленга.
Способ определения местоположения работающей РЛС реализуется следующим образом. Предполагается, что приемные устройства пассивного моноимпульсного пеленгатора в месте наблюдения имеют достаточную чувствительность для приема прямых сигналов передатчика РЛС по боковому излучению его антенны. Ставя в соответствие измеренным разностям углов и моментам приема сигналов пеленгатором координаты реально существующих на местности отражающих объектов, вычисляется местоположение передатчика.
Способ, реализованный в данном устройстве, поясняется фиг. 2, согласно которой в точке Е расположен импульсный передатчик РЛС, в точке О - моноимпульсный пеленгатор, в точке А - единственный переотражающий объект, координаты которого известны. Импульсы, излученные передатчиком, приходят в точку приема О по прямому пути ЕО и по пути ЕАО, переотразившись от объекта А. Приемный пункт (в точке О -моноимпульсный пеленгатор) имеет слабонаправленные антенны и способен принимать как прямые сигналы передатчика РЛС, излученные боковыми лепестками антенны РЛС, так и переотраженные от поверхности сигналы при направлении на них главного лепестка антенны РЛС. При этом моноимпульсный пеленгатор измеряет углы прихода прямого и переотраженного сигналов, а также задержку τ между ними. По задержке τ определяется разность длин путей прямого и переотраженного сигнала δ=сτ=ЕА+АО-ЕО, где с - скорость света. Из последнего соотношения следует, что EA+AO=R+δ, где R - расстояние. Это означает, что точка А лежит на эллипсе, в фокусах которого расположены передающее и приемное устройства, и что сумма расстояний от любой точки эллипса до его фокусов равна R+δ.
Из фиг. 2 также следует, что для любой точки, находящейся на эллипсе, выполняется соотношение:

где α - угол между приемником и отражающим объектом,
х - горизонтальная координата точки эллипса,
у - вертикальная координата точки эллипса.
Подставляя формулу (6) в уравнение эллипса находим координаты х и у отражающего объекта А:


Дальность до источника радиоизлучения оценивается путем сравнения действительных координат xni, yni занесенных в память компьютера, с рассчитанными по формулам (7 и 8), в которые были подставлены измеренные значения угла α, пространственная разность путей распространения сигналов δ и переменная величина R. За оценку дальности принимается такое значение R, при котором разность между рассчитанными и заложенными в память компьютера координатами минимальна. Вследствие неизбежности ошибок измерений полное совпадение рассчитанных координат и координат, занесенных в память компьютера, маловероятно, поэтому формула для оценки дальности до источника радиоизлучения при использовании одного переотражающего объекта может быть записана как:

где xi(R, α, δ) и yi(R, α, δ) - координаты i-ого отражающего объекта.
Поскольку в зоне действия приемного пункта (пеленгатора) может быть несколько отражающих радиоконтрастных объектов, которые могут быть использованы для определения дальности R, то формула для оценки дальности R в этом случае может быть записана в виде:

Дальность R, удовлетворяющая формуле (9), принимается за истинную.
В способе, реализуемом в прототипе, для определения дальности до РЛС необходима точная априорная информация о координатах переотражающих объектов, что на море всегда принципиально невозможно, а на суше невозможно при нахождении РЛС и пассивного однолучевого пеленгатора (ПП) на однотипной местности, без радиоконтрастных элементов, например, лес, степь, берега северных морей. Кроме того, необходимость использования сигнала, излучаемого антенной РЛС по боковым лепесткам, уменьшает дальность действия прототипа. Определение направления на РЛС в прототипе осуществляется моноимпульсным методом, который предусматривает более высокое отношение сигнал/шум, чем дальномерные измерения, что тоже уменьшает дальность действия прототипа, кроме того, для получения приемлемой точности измерения направления на РЛС антенны моноимпульсного пеленгатора должны иметь узкие диаграммы направленности, что исключает малогабаритное выполнение системы. Дальность в прототипе оценивается вероятностным критерием, что допускает возможность появления грубых ошибок измерений.
Технический результат изобретения заключается в расширении функциональных возможностей способа путем определения направления на обзорную РЛС и дальности до нее в отсутствии на местности радиоконтрастных отражающих объектов при одновременном повышении достоверности результатов измерений и дальности измерений при использовании антенны с широкой диаграммой направленности, что позволяет реализовать способ в малогабаритных системах.
Достижение указанного технического результата обеспечивается в предлагаемом способе определения местоположения обзорной РЛС пассивным пеленгатором, заключающемся в приеме прямых и переотраженных от подстилающей поверхности сигналов РЛС, сигналов, образующихся при направлении на них главного лепестка антенны РЛС (эхо-сигналов), обнаружении прямых импульсных сигналов РЛС, и импульсных сигналов, переотраженных подстилающей поверхностью, и определении временных параметров сигналов, отличающемся тем, что прием упомянутых прямых и переотраженных сигналов осуществляют пассивным пеленгатором (ПП), при полном обороте обзорной антенны РЛС, определяют период полного оборота антенны РЛС Тоб,, после чего измеряют интервал времени ti<Тоб, поворота антенны РЛС относительно направления на ПП, затем обнаруживают сигналы, принятые в момент времени ti лучом ПП, определяют угол поворота антенны РЛС относительно направления на ПП по формуле: αki=2 πti/Тоб, далее измеряют длительности переотраженных сигналов τП1 и τП2, принятых при поворотах луча соответственно на углы αki и (αki+π), после чего определяют угол βki между направлением на РЛС и направлением оси луча ПП, по формуле:

где τП1 - длительность принятого приемником ПП сигнала при угле αki поворота антенны РЛС, τП2 длительность принятого приемником ПП сигнала при угле (αki+π) поворота антенны РЛС, τИ - длительность зондирующего импульса РЛС, ψ - ширина диаграммы направленности луча ПП, затем определяют расстояние Rk до РЛС по формуле:
В предлагаемом способе не требуется наличия на местности радиоконтрастных объектов с известными координатами, что расширяет функциональные возможности способа. Поскольку определение местоположения РЛС выполняется по детерминированным соотношениям (не используются вероятностные соотношения), то исключаются грубые ошибки. При этом, поскольку исключается вероятностная оценка местоположения РЛС, то повышается достоверность результатов измерений. Кроме того, в предлагаемом способе отсутствует необходимость принимать сигналы, излучаемые по боковым лепесткам РЛС, что позволяет определять местоположение РЛС, находящихся на более дальних расстояниях. Поскольку определение местоположения РЛС осуществляется без выполнения угломерных измерений эхо сигналов, то снимется требование узости диаграммы направленности (соответственно и габаритов) антенны, что позволяет реализовать данный способ в малогабаритных системах, например, для установки на беспилотные летательные аппараты.
Предложенный способ не известен из уровня техники, а также не известны источники информации, содержащие сведения об аналогичных технических решениях, имеющих признаки, сходные с признаками, отличающими заявляемое решение от прототипа, а также свойства, совпадающие со свойствами заявляемого решения. Поэтому можно считать, что предложенное изобретение обладает существенными отличиями, вытекающими из известных решений неочевидным образом и, следовательно, соответствует критериям «новизна» и «изобретательский уровень».
Поясним достижение технического результата приведенными отличиями с использованием геометрических построений, представленных на фиг. 3. Пассивный пеленгатор, имеющий один луч, расположен в точке О, в точке С находится пеленгуемая РЛС кругового обзора, длительность периода одного оборота антенны Тоб, РЛС излучает зондирующие импульсы длительности τИ. Требуется определить местоположение РЛС, то есть дальность Rk от ПП до РЛС и βk - угол на РЛС относительно оси луча ПП.
Реализация предлагаемого способа, заключается в следующем. Если пеленгуемая РЛС находится в луче ПП, то при вращении антенны РЛС в моменты времени направления антенны РЛС на ПП на выходе приемника пеленгатора появляются последовательно во времени пачки импульсов с периодом Тоб.
Пусть αKi - угол поворота антенны РЛС от направления на ПП в текущий момент времени ti, тогда
αKi=Ωti,
где ti - время поворота антенны РЛС на угол αKi относительно момента времени, когда антенна РЛС направлена на пеленгатор, Ω - угловая скорость вращения антенны.
Ω=2π/Тоб, [рад/сек]
где Тоб - время одного оборота антенны РЛС.
Следовательно 
Зондирующий импульс РЛС, распространяясь по лучу антенны РЛС, облучает подстилающую поверхность земли или моря, возникающий при этом рассеянный сигнал представляет собой узкополосный квазигармонический нормальный процесс, ширина спектра которого равна ширине спектра зондирующего импульса. Только при движении зондирующего импульса в пределах луча ПП такой рассеянный сигнал будет приниматься приемником луча ПП. В момент выхода зондирующего импульса за пределы луча ПП прием эхо сигнала приемником ПП прекращается, независимо от интенсивности рассеянного сигнала в этот и последующие моменты времени. Следовательно, длительность формируемого сигнала определяется временем движения зондирующего импульса от антенны РЛС до границы луча ПП. Момент начала формирования (но не приема) эхо сигнала совпадает с моментом излучения зондирующего импульса, момент окончания формирования эхо сигнала, который будет в последствии принят приемником ПП, определяется расстоянием от антенны РЛС до соответствующей границы луча. Принимаемый приемником ПП сигнал Представляет собой отрезок квазигармонического процесса, длительность которого τПi в i-ом цикле зондирования должна быть измерена. При этом на начало принимаемого приемником ПП эхо сигнала может накладываться зондирующий импульс, излученный боковым лепестком антенны РЛС. Это несколько изменит плотность вероятности эхо сигнала, что приведет к улучшению характеристик обнаружения эхо сигнала.
Рассмотрим процесс измерения βk1 - пеленга на РЛС относительно оси луча ПП и дальность Rk от ПП до РЛС, выполняемый только на основе дальномерных измерений при использовании прямых и рассеянных сигналов, получаемых по лучу.
На фиг. 3 изображены: точка С - местоположение пеленгуемой РЛС; ОО' - направление оси луча ПП, относительно которого определяется направление на РЛС; ψ - ширина луча ПП; βk1 - пеленг на РЛС относительно оси луча ПП; точки а и b - точки пересечения направления луча РЛС соответственно с правой (точка а) и левой (точка b) границами луча ПП; αki - угол поворота антенны пеленгуемой РЛС относительно направления от РЛС на ПП в данном (i-ом) цикле зондирования; точка О - местоположение ПП.
Определим длительность сигнала (отрезка квазигармонического процесса,), формируемого при распространении зондирующего импульса от точки С до точки а. При этом пренебрегаем конечной величиной ширины луча РЛС из за ее малости (1-3 градуса). Момент начала сигнала совпадает с моментом излучения зондирующего импульса, кончается формирование сигнала (образуется задний фронт сигнала) когда через правую границу луча ПП (точка а) пройдет задний фронт зондирующего импульса, то есть - в момент времени  поскольку точка а будет еще облучаться в течение длительности импульса - τИ после прохождения ее передним фронтом импульса точки а.
поскольку точка а будет еще облучаться в течение длительности импульса - τИ после прохождения ее передним фронтом импульса точки а.
Принимаемый приемником ПП сигнал от точки С (т.е. начало сигнала, рассеянного подстилающей поверхностью), придет в точку О с запаздыванием tc относительно момента излучения зондирующего импульса  где с - скорость света. То есть в момент времени tc появится передний фронт сигнала на входе приемника ПП. Задний фронт придет с запаздыванием tc относительно момента излучения зондирующего импульса на величину
где с - скорость света. То есть в момент времени tc появится передний фронт сигнала на входе приемника ПП. Задний фронт придет с запаздыванием tc относительно момента излучения зондирующего импульса на величину  Следовательно, длительность τП1 сигнала, рассеянного подстилающей поверхностью и принятого по лучу ПП, будет равна
Следовательно, длительность τП1 сигнала, рассеянного подстилающей поверхностью и принятого по лучу ПП, будет равна

Из ΔОас (фиг. 3) по теореме синусов получим
Выразим стороны Оа и ас через Ос

Определим длительность сигнала (отрезка квазигармонического процесса, принимаемого приемником луча ПП), формируемого при угле поворота антенны на угол (αki+π), то есть при распространении зондирующего импульса от точки С до точки b, считая что за время половины оборота антенны РЛС местоположение РЛС существенно не изменится. Сигнал от точки С (т.е. начало сигнала, рассеянного подстилающей поверхностью), представляющий собой передний фронт импульса с квазигармоническим заполнением, придет в точку О с запаздыванием tc относительно момента излучения зондирующего импульса на величину  где с - скорость света. Закончится формирование сигнала (образуется задний фронт сигнала), когда через левую границу луча ПП (точка b) пройдет задний фронт зондирующего импульса, то есть, как и в предыдущем случае - в момент времени
где с - скорость света. Закончится формирование сигнала (образуется задний фронт сигнала), когда через левую границу луча ПП (точка b) пройдет задний фронт зондирующего импульса, то есть, как и в предыдущем случае - в момент времени  Следовательно, длительность τП2 сигнала, рассеянного подстилающей поверхностью Земли и принятого по лучу ПП, будет равна:
Следовательно, длительность τП2 сигнала, рассеянного подстилающей поверхностью Земли и принятого по лучу ПП, будет равна:

Из формулы (13) следует

Из ΔObc (фиг. 3) по теореме синусов получим

Или
Выразим стороны Ob и bc через Ос
Подставим эти выражения в (14):
Или

Отсюда выразим Ос:

Перепишем выражение (11).

Из ΔОас (фиг. 3) по теореме синусов получим

Или
Выразим стороны Оа и ас через Ос
Подставим эти выражения в (16):

Или

Отсюда выразим Ос:

Приравняем правые части уравнений (15) и (17):

Воспользуемся формулами из тригонометрии
Знаменатель левой части уравнения (18):
1) Сумма первых двух слагаемых:

2) Третье слагаемое, как синус двойного аргумента:

3) Знаменатель целиком:

Таким образом, левая часть уравнения (18) принимает вид:

В результате левая часть уравнения (18) после преобразований приняла вид:

Выполнив аналогичные преобразования правой части уравнения (18), получим следующее выражение:
Тогда уравнение (18) можно переписать в виде:

Умножив обе части уравнения (19) на произведение
 получим:
получим:

Воспользуемся тригонометрическими формулами


Произведение первых трех сомножителей в левой части уравнения (20):

Произведение первых трех сомножителей в правой части уравнения (20):

Уравнение (20) принимает вид:
Произведем умножение в обеих частях уравнения (21):

Введем обозначения:

Тогда уравнение (22) примет вид:

Или a2sinϕ-acosϕ=b2-b1
Разделим обе части этого уравнения на 

Коэффициенты уравнения обладают свойствами синуса и косинуса, а именно: модуль (абсолютное значение) каждого из них не больше 1, а сумма их квадратов равна 1. Тогда можно обозначить их соответственно как cosx и sinx (здесь х - так называемый вспомогательный угол), и уравнение (24) принимает вид:

При принятых обозначениях:



Представим левую часть уравнения (25) как синус разности двух углов, тогда уравнение (25) примет вид:
sin(ϕ-x)=A
Решением этого уравнения будет:
ϕ-х=arcsin A или ϕ=arcsin A+х
здесь 
По прежним обозначениям 
Поэтому
Или
где a, b, А - принятые ранее обозначения:



Если подставить эти обозначения в окончательную формулу (26) получим выражение:

Получим формулу для расчета дальности от ПП до РЛС.
Из ΔОас (фиг. 3) по теореме синусов получим
Выразим стороны Оа и ас через Ос

Подставив эти соотношения в (11), запишем
Откуда найдем дальность до РЛС-Rk=Oc

Применение рассмотренной методики возможно только до дальностей, для которых интенсивность принятого рассеянного поверхностью сигнала достаточна для выполнения дальномерных измерений при двух (как минимум) положениях луча антенны РЛС: при αki и (αki+π). Для случая пеленгации судовых РЛС при взволнованной поверхности моря - это дальность порядка 10 км (см. 5. Судовая радиолокация Дуров А.А. и др. изд. Камчат ГТУ, 2005, стр. 44), при пеленгации наземных РЛС может быть и больше.
На фиг. 4 показаны зависимости удлинения (τП1-τИ) и (τП2-τИ), принятых приемником ПП рассеянных сигналов в функции угла поворота αki антенны РЛС относительно направления на ПП
На фиг. 5 приведен пример структурной схемы устройства для реализации предлагаемого способа, на которой показано:
15 - Антенна ПП (Ант)
16 - Приемник ПП (Пр-к)
17 - Обнаружитель прямого сигнала (ОПС)
18 -Обнаружитель пачек прямого сигнала (ОППС)
19 - Измеритель длительности прямого сигнала (ИДПС)
20 - Обнаружитель рассеянного сигнала (переотраженного) (ОРС)
21 - Счетчик времени (СВР)
22 - Измеритель длительности рассеянного сигнала (ИДРС)
23 - Вычислитель текущего положения антенны (ВТПА)
24 - Вычислитель местоположения РЛС (ВМ)
При этом выход антенны 15 соединен со входом приемника 16, выход которого связан со входами обнаружителя 20 рассеянного сигнала (ОРС) и обнаружителем 17 прямого сигнала (ОПС), выходом соединенного со входом измерителя 19 длительности прямого сигнала (ИДПС) и входом обнаружителя 18 пачек прямого сигнала (ОППС), выход которого связан с первым входом ВТПА 23 и со входом счетчика 21 времени (СВР), выходом подключенного к третьему входу вычислителя 23 текущего положения антенны, второй вход которого связан с выходом ОРС 20, а выход - со вторым входом вычислителя 24 местоположения РЛС (ВМ), первым входом подключенного к выходу измерителя 19 длительности прямого сигнала (ИДПС), а третьим входом - к выходу измерителя 22 длительности рассеянного сигнала (ИДРС), вход которого подключен к выходу обнаружителя 20 рассеянного сигнала (ОРС), второй вход которого соединен с выходом обнаружителя 17 прямого сигнала, при этом выходом устройства являются первый и второй выходы вычислителя 24 местоположения РЛС (ВМ).
На фиг. 6 приведена блок-схема алгоритма работы вычислителя текущего положения антенны (ВТПА) 23.
На фиг. 7 приведена блок-схема алгоритма работы вычислителя местоположения РЛС (ВМ) 24.
На фиг. 4. Верхний график - (τП1-τИ) и нижний график - (τП2-τИ), рассчитывались и строились в программе MathCad 2000 при βк1=3°, ψ=10°, при дальности до РЛС Ос=10000 м, с=300000000 м/с, при изменении угла αki от 20° до 120°. Как видно из графиков удлинение принятых ПП сигналов относительно излученных РЛС зондирующих импульсов при углах αki поворота антенны РЛС порядка 60-90 градусов составляет единицы - десятые доли микросекунд, что вполне поддается измерениям.
Предлагаемый способ осуществляется в устройстве, структурная схема которого приведена на фиг. 5, следующим образом: при направлении антенны РЛС на ПП, прямой сигнал (зондирующий импульс) принимается антенной 15 ПП, проходит через приемник 16 ПП, обнаружитель 17 прямого сигнала (ОПС), поступает на вход измерителя 19 длительности прямого сигнала и на вход обнаружителя 18 пачек прямого сигнала, в котором формируется импульс, соответствующий временному положению пачки прямого сигнала. Этот импульс запускает начало отсчета счетчика 21 времени (СВР), который отсчитывает текущее время, начиная с момента прохождения антенной РЛС направления на ПП, о чем сигнализирует импульс с выхода ОППС 18. Следующий импульс, поступающий с выхода ОППС 18, обнуляет счетчик СВР 21 и запускает его вновь. При этом ВТПА 23 запоминает показания СВР 21, это число определяет период Тоб оборота антенны РЛС. Поскольку мощность прямого зондирующего сигнала значительно больше мощности сигнала, рассеянного поверхностью, то принимаемые эхосигналы, рассеянные поверхностью, не смогут проходить через ОПС 17 и влиять на работу вышеописанной части устройства. Для того чтобы прямые сигналы не проходили на выход ОРС 20 и не нарушали работу устройства, выходные сигналы ОПС 17 блокируют работу ОРС 20 по второму входу на время действия прямых сигналов.
С приходом по лучу ПП рассеянного сигнала достаточной мощности, появляется импульс на выходе ОРС 20, который поступает на второй вход ВТПА 23, вызывая считывание времени ti записанного к этому моменту в счетчик 21 времени, и запись его в вычислитель ВТПА 23, который рассчитывает угол поворота антенны αki относительно направления на ПОП по формуле 10 и посылает его на второй вход ВМ 24. Этот угол соответствует положению αki антенны РЛС, при котором лучом ПП принимает в данный момент сигнал (эхосигнал), рассеянный подстилающей поверхностью в i-ом цикле зондирования РЛС. Длительность τП1 этого эхосигнала измеряется в ИДРС 22 и поступает на третий вход ВМ 24, куда по первому входу поступает также длительность τИ прямого сигнала, измеренная в ИДПС 19. После получения величин τИ, τП1, αki ВМ 24 βRi, заносит эти величины в память. При дальнейшем вращении антенны, после достижения углом αki1 величины αki1=(αki+π), с учетом измеренной в это время величины τП2 и постоянной величины вычислитель ВМ 24 по формуле 27 рассчитывает величину угла βki. Далее, с учетом вычисленной величины βRi, по формуле 28 рассчитывается величина RKi,. Вычисленные при данном угле поворота антенны РЛС значения βкi и RКi поступают на соответствующие первый и второй выходы ВМ 24 для дальнейшего использования.
Рассмотрим пример выполнения блоков предлагаемого устройства.
В качестве антенны 15 ПП может быть использована спиральная антенна, антенная решетка, и др., например, как в (см. 6. патент на изобретение РФ №2084059, МПК H01Q 15/08, опубл. 10.07.1997 г.).
Приемник 16 ПП, может быть выполнен как в (см. 7. Проектирование радиоприемных устройств под ред. Сиверса А.П. М.: «Сов. радио», 1976 г., стр. 485, стр. 68, рис. 2.25).
Обнаружители ОПС 17 и ОРС 20 могут быть выполнены как в (см. 8. Обнаружение радиолокационных сигналов неизвестной формы. Зиганшин Э.И., Иммореев И.Я. 5-я Международная конференция «Цифровая обработка сигналов и ее применение» DSPA 2003).
Обнаружитель ОППС 18 может быть выполнен как обнаружитель пачки сигналов в (см. 9. патент РФ №2308046, G01S 7/28, 7/292, опубл. 10.10.2007 г.).
Измерители длительностей ИДПС 19 и ИДРС 22 могут быть выполнены как в (см. 10. Измерение интервала времени с пикосекундным разрешением для системы «лазер - времяпозиционно-чувствительный детектор излучения» У. Юсупалиев, Н.В. Радомский, С.А. Шутеев, В.А. Коковин, П.У. Юсупалиев Московский государственный университет им. М.В. Ломоносова, физический факультет, Прикладная физика №5, 2009 стр 113).
Счетчик времени СВР 21 может быть выполнен в виде (11. Потехин В.А. Схемотехника цифровых устройств. Томск, В-Спектр 2012).
Вычислители ВТПА 23 и ВМ 24 представляет собой устройства, реализующее вычислительные процедуры в соответствии с блок-схемами алгоритмов, представленных на фиг. 6 и фиг. 7, и могут быть выполнены на соответствующих ПЛИС, используемых, например в (см. 12. Патент на полезную модель РФ №72339 МПК G06F 15/16 опубл. 10.04.2008.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения местоположения сканирующей РЛС пассивным многолучевым пеленгатором | 2016 |
|
RU2633962C1 |
| Способ определения местоположения работающей РЛС пассивным многолучевым пеленгатором | 2019 |
|
RU2741333C1 |
| Способ определения местоположения сканирующей РЛС пассивным многолучевым пеленгатором | 2020 |
|
RU2758832C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2002 |
|
RU2240576C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РАБОТАЮЩЕЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2010 |
|
RU2457505C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА МЕСТА НИЗКОЛЕТЯЩЕЙ ЦЕЛИ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2307375C1 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПРОТИВОРАДИОЛОКАЦИОННОЙ РАКЕТЫ НА ОСНОВЕ ИСПОЛЬЗОВАНИЯ ДОПОЛНИТЕЛЬНОГО ИСТОЧНИКА ИЗЛУЧЕНИЯ ПОДЪЕМНОГО ТИПА | 2005 |
|
RU2287168C1 |
| ВРЕМЕННОЙ СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО СКАНИРУЮЩЕГО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ БЕЗ ИЗМЕРЕНИЯ ПЕЛЕНГА | 2018 |
|
RU2704029C1 |
| ВРЕМЕННОЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ СКАНИРУЮЩЕГО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2020 |
|
RU2742581C1 |
| УСТРОЙСТВО СЕЛЕКЦИИ МАЛОВЫСОТНЫХ МАЛОСКОРОСТНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ И ДВИЖУЩИХСЯ НАЗЕМНЫХ ЦЕЛЕЙ В КОГЕРЕНТНОЙ БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2005 |
|
RU2298809C9 |


Изобретение относится к области радиолокации и предназначено для определения местоположения работающей радиолокационной станции (РЛС) кругового обзора, например судовой навигационной РЛС. Технический результат изобретения заключается в расширении функциональных возможностей способа путем определения направления на обзорную РЛС и дальности до нее в отсутствии на местности радиоконтрастных отражающих объектов, при одновременном повышении достоверности результатов измерений и дальности измерений при использовании антенны с широкой диаграммой направленности, что позволяет реализовать способ в малогабаритных системах. В способе осуществляют прием прямых и переотраженных от подстилающей поверхности сигналов РЛС, образующихся при направлении на них главного лепестка антенны РЛС (эхо-сигналов), обнаружение прямых импульсных сигналов РЛС, и импульсных сигналов, переотраженных подстилающей поверхностью, определение временных параметров сигналов. Прием упомянутых прямых и переотраженных сигналов осуществляют пассивным пеленгатором (ПП) при полном обороте обзорной антенны РЛС, определяют период полного оборота антенны РЛС Тоб, после чего начинают измерение интервала времени ti<Тоб, поворота антенны РЛС относительно направления на ПП. Затем обнаруживают сигналы, принятые в момент времени ti лучом ПП, определяют угол поворота антенны РЛС относительно направления на ПП по формуле: αki=2πti/Тоб. Далее измеряют длительности переотраженных сигналов τП1 и τП2, принятых при поворотах луча соответственно на углы αki и (αki+π), после чего определяют угол βk1 между направлением на РЛС и направлением оси луча ПП и расстояние Rk до РЛС. 7 ил.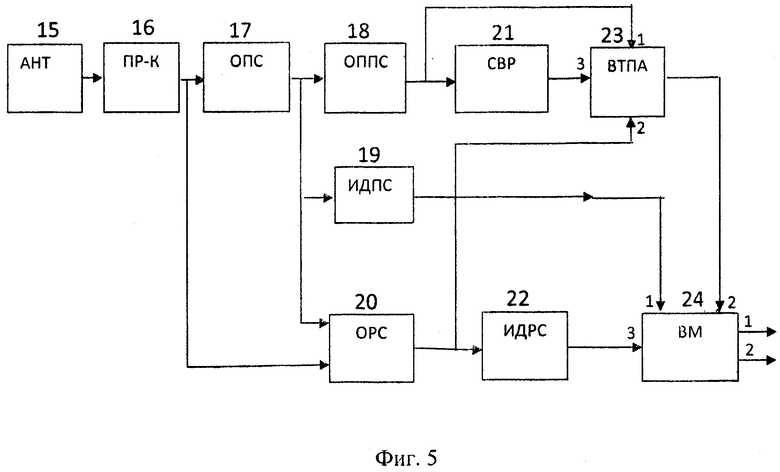
Способ определения местоположения обзорной РЛС пассивным пеленгатором (ПП), заключающийся в приеме и выделении ПП прямых импульсных сигналов РЛС, обнаружении импульсных сигналов, переотраженных подстилающей поверхностью земли или моря, и измерении временных параметров сигналов, отличающийся тем, что осуществляют прием ПП прямых импульсных сигналов и при полном обороте сканирующей антенны РЛС определяют период Тоб, после чего начинают измерение интервала времени ti поворота антенны РЛС относительно направления на ПП, затем обнаруживают сигналы, принятые в момент времени ti лучом ПП, определяют угол поворота антенны РЛС относительно направления на ПП по формуле: αki=2πti/Тоб, далее измеряют длительности переотраженных сигналов τП1 и τП2, принятых при поворотах луча антенны РЛС соответственно на углы αki и (αki+π), после чего определяют угол βk1 между направлением оси луча ПП и направлением на РЛС по формуле:
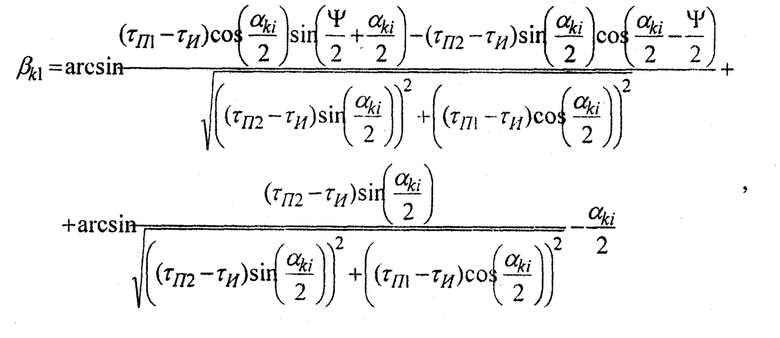
где τП1 - длительность принятого приемником ПП сигнала при угле αki поворота антенны РЛС, τП2 длительность принятого приемником ПП сигнала при угле (αki+π) поворота антенны РЛС, τИ - длительность зондирующего импульса РЛС, ψ - ширина диаграммами направленности луча ПП, затем определяют расстояние Rk от ПП до РЛС по формуле:
 где с - скорость распространения радиоволн.
где с - скорость распространения радиоволн.
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО ИЗЛУЧАЮЩЕЙ ОБЗОРНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2010 |
|
RU2444748C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ И НАПРАВЛЕНИЯ ДВИЖЕНИЯ НОСИТЕЛЯ ОБЗОРНОЙ РЛС | 2007 |
|
RU2390038C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РАБОТАЮЩЕЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2010 |
|
RU2457505C2 |
| Способ определения местоположения сканирующей РЛС пассивным многолучевым пеленгатором | 2016 |
|
RU2633962C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГОРИЗОНТАЛЬНОЙ ДАЛЬНОСТИ ЦЕЛИ ПО ИЗЛУЧЕНИЮ СКАНИРУЮЩЕЙ БОРТОВОЙ РЛС | 2001 |
|
RU2217772C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАКЛОННОЙ ДАЛЬНОСТИ ДО ДВИЖУЩЕЙСЯ ЦЕЛИ ПАССИВНЫМ МОНОСТАТИЧЕСКИМ ПЕЛЕНГАТОРОМ | 2014 |
|
RU2557808C1 |
| US 4882590 A, 21.11.1989 | |||
| US 5652588 A, 29.07.1997 | |||
| Способ изготовления формовочного инструмента свободным выдавливанием | 1978 |
|
SU764822A1 |

