Изобретение относится к орбитальным электромеханическим системам (ОС), т. е. многофункциональным, многороторным, многокоординатным электромеханическим преобразователям, имеющим общую магнитную систему и ряд роторов, оси которых разнесены по образующим замкнутой цилиндрической поверхности (орбите), при этом роторы имеют возможность совершать как минимум два движения: вращение вокруг собственной оси и орбитальное перемещение по круговой траектории относительно общего центра.
Известен мотор-редуктор [1] , имеющий орбитальную электромеханическую систему с цилиндрическими якорями, в котором два вида движения якоря обеспечиваются двумя различными системами - фиксирующей и тормозной. Недостатком данного мотора-редуктора является наличие усложненной механической части и отдельных приводов каждого тормоза.
Наиболее близким к заявляемому по совокупности существенных признаков является орбитальный мотор-редуктор [2], имеющий совместное групповое управление тормозом и фиксатором с помощью одного активного элемента. Недостатком данной системы является остающаяся необходимость в применении специального механического фиксатора, что приводит к усложнению механической части мотор-редуктора.
Изобретение направлено на упрощение конструкции и повышение надежности мотор-редуктора.
Это достигается тем, что орбитальный мотор-редуктор, преимущественно торцевого типа, содержащий внутренний и внешний статоры с обмотками, блок из двух орбитальных роторов, установленных в водиле и имеющих короткозамкнутые обмотки, тормозное устройство, включающее в себя обмотку тормоза, взаимодействующую с подпружинным тормозным сердечником с тормозной накладкой и диском, установленным в подшипнике, фланцы и корпус, причем согласно изобретению блок роторов снабжен магнитопроводом с дополнительной обмоткой, размещенным в междуроторном пространстве, выводные концы дополнительной обмотки подсоединены к контактно-кольцевому узлу, состоящему из токосъемного устройства со щетками, установленного на фланце, и контактных колец, установленных на водиле, при этом роторы соединены механической связью в виде замкнутого гибкого элемента.
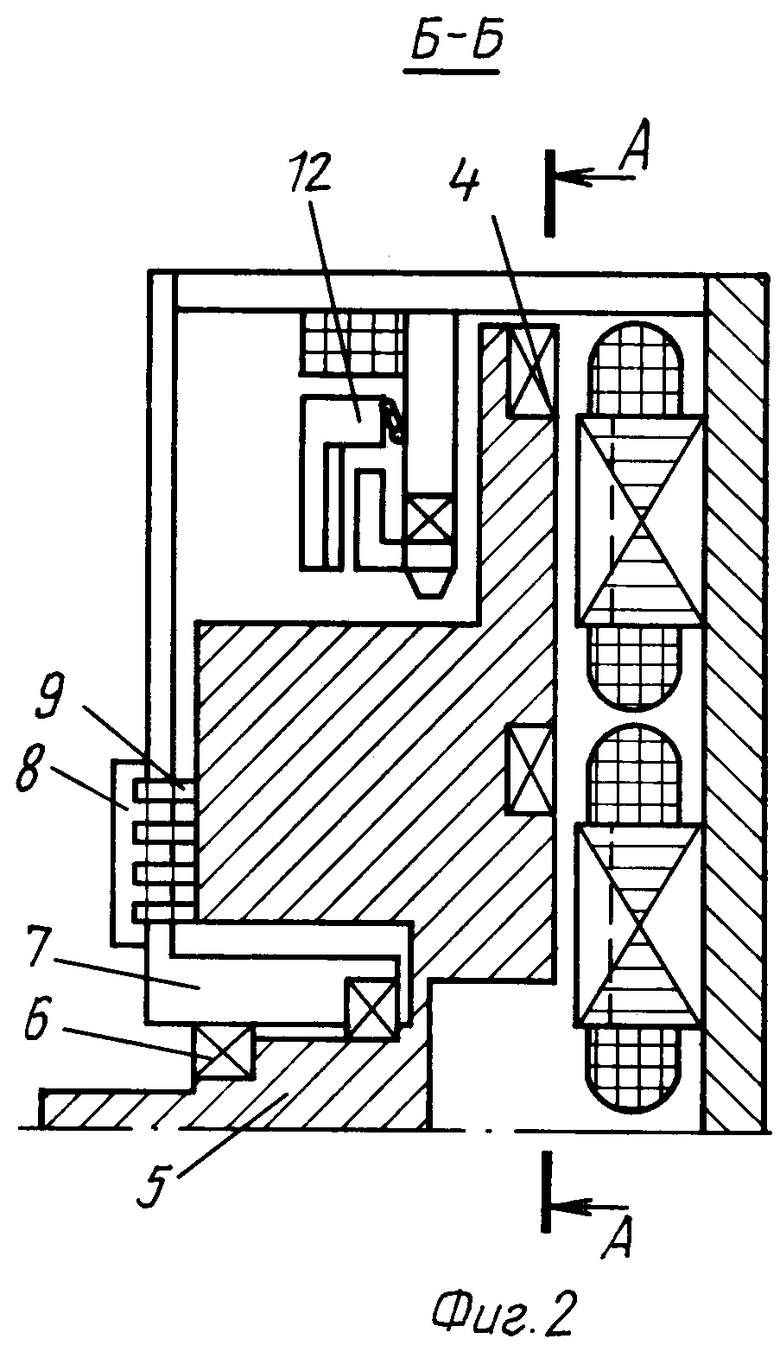
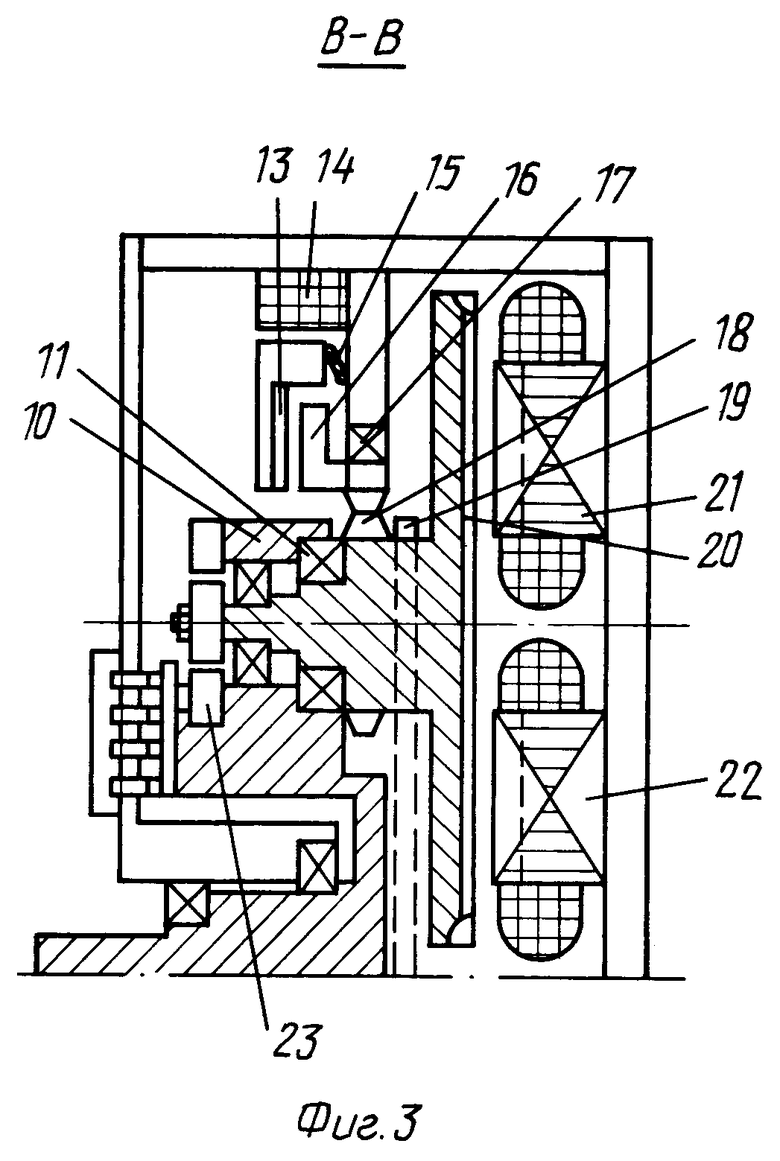
Сущность изобретения иллюстрируется чертежами, где на фиг.1 изображен вид в плоскости торцевых якорей орбитального мотор-редуктора, на фиг.2 показан разрез по дополнительному магнитопроводу, на фиг.3 показан разрез по диску-сателлиту.
Орбитальный мотор-редуктор имеет корпус 1, дисковые торцевые якори (роторы) - сателлиты 2, дополнительный магнитопровод 3, умеющий дополнительную обмотку 4. Мотор-редуктор снабжен выходным валом 5, установленным в подшипниках 6, подшипники закреплены во фланце 7, на котором также установлено токосъемное устройство 8 со щетками, которые контактируют с контактными кольцами 9, которые, в свою очередь, установлены на водило 10, составляющем одно целое с валом 5. На водиле в подшипниках 11 установлены роторы-сателлиты. Имеется тормоз, включающий в себя тормозной элемент-сердечник 12 с тормозной накладкой 13, взаимодействующий с катушкой 14 и подпружиненный пружиной 15. Накладка 13 взаимодействует с диском 16, который установлен в подшипнике 17, внутренняя часть диска представляет собой венцовое зубчатое колесо внутреннего зацепления, которое взаимодействует с зубцами 18 ротора-сателлита, снабженного канавкой, в которой располагается гибкая связь 19. Ротор имеет магнитопровод с короткозамкнутой обмоткой 20, которая находится в активной зоне внешнего статора 21 и внутреннего статора 22. С валом каждого ротора соединены тахогенераторы 23, корпус которых установлен на водиле 10, а выводы присоединены к своим контактным кольцам. Всего имеется две пары контактных колец: два кольца для выводов катушки 4, и два кольца для выводов тахогенератора (предполагается, что тахогенераторы имеют возбуждение от постоянных магнитов).
Устройство работает следующим образом. Статоры 21 и 22 образуют каждый две активные зоны: зона взаимодействия с роторами 2 и зона взаимодействия с дополнительным магнитопроводом 3 - см. фиг.1. Контактные выводы с коммутационного узла 8 подсоединены так же, как и статоры, к блоку управления. Рассмотрим режим пониженной скорости. В этом случае контакты, ведущие к выводам обмотки 4, разомкнуты, катушка 14 включена и притягивает сердечник 12 таким образом, что накладка 13 тормозит диск 16. Пружина 15 сжата. Таким образом, венцовая шестерня фиксируется относительно корпуса. Направления движений полей в статорах 21 и 22 - противоположные - см. левый ротор на фиг.1. Роторы, вращаясь, взаимодействуют зубцами 18 с зубцами венцовой шестерни, совершая эпициклическое движение, в результате которого водила 10 и вал 5 совершают угловое движение с пониженной скоростью.
Режим повышенной скорости. В этом случае выводы обмотки 4 замыкаются тумблером, входящим в состав блока управления, таким образом, магнитопровод 3 является магнитным телом с короткозамкнутой обмоткой. Обмотка 14 тормоза отключается, под действием пружины 15 сердечник 12 с тормозной накладкой 13 отходит влево - см. фиг.3, освобождая диск с венцовой шестерней, которая тем самым является свободно вращающейся в подшипнике 17. Совокупность тормозного диска 16 и роторов 2 вместе с магнитопроводом 3 является составным ротором, который вращается под действием согласно направленных полей статоров 21 и 22 - см. правый ротор на фиг.1. Возможное рассогласование, вызванное, например, различными электромагнитными моментами от статоров 21 и 22, устраняется посредством присутствия гибкой связи 19. В ответственных случаях, когда необходимо предотвращение любого проворачивания роторов, возможно задействование тахогенератора 23, который, будучи подключен через токосъемное устройство 8 к блоку управления, выдает сигнал на прерывание коммутации статора 21 или 22, в зависимости от направления вращения ротора 2.
Введение дополнительного магнитопровода 3 с катушкой 4, задействованной в режиме повышенной скорости, приближает размер активной зоны торцевой орбитальной электромеханической системы к размеру активной зоны односкоростного торцевого электродвигателя со сплошным ротором, поскольку размеры воздушного зазора между роторами 2 и магнитопроводом 3 относительно малы. При этом в режиме пониженной скорости влияние обмотки 4 отсутствует, поскольку она разомкнута.
Источники информации
1. Патент РФ 2074490 /А.М. Литвиненко - Мотор-редуктор/ опубл. Б.И. 6, 1997, H 02 К 41/06, з-ка 94000564/07 от 06.01.94.
2. Патент РФ 2071631 /А.М. Литвиненко - Орбитальный мотор-редуктор/ опубл. Б.И. 1, 1997, Н 02 К 41/06, з-ка 94000636/07 от 06.01.94.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОРБИТАЛЬНЫЙ МОТОР-РЕДУКТОР | 2010 |
|
RU2505912C2 |
| ОРБИТАЛЬНЫЙ МОТОР-РЕДУКТОР | 2009 |
|
RU2428782C2 |
| ОРБИТАЛЬНЫЙ ШАГОВЫЙ МОТОР-РЕДУКТОР | 2001 |
|
RU2215358C2 |
| МОТОР-РЕДУКТОР | 1994 |
|
RU2074490C1 |
| ОРБИТАЛЬНЫЙ МОТОР-РЕДУКТОР | 1994 |
|
RU2071631C1 |
| Статор орбитальной электрической машины | 2015 |
|
RU2646619C2 |
| Мотор-колесо транспортного средства | 2024 |
|
RU2830225C1 |
| Самотормозящийся винтовой домкрат с аксиальным электродвигателем | 2018 |
|
RU2711321C1 |
| Мотор-колесо транспортного средства | 2023 |
|
RU2813165C1 |
| МОТОР-РЕДУКТОР С ИНТЕГРИРОВАННЫМ ПРЕЦЕССИРУЮЩИМ ЗУБЧАТЫМ КОЛЕСОМ (ВАРИАНТЫ) | 2013 |
|
RU2538478C1 |
Изобретение относится к области электротехники и может быть использовано в двухскоростном электроприводе, например, подъемно-транспортных машин, стиральных машин барабанного типа, бетоновозных тележек. Сущность изобретения: орбитальный мотор-редуктор, преимущественно торцевого типа, содержащий внутренний и внешний статоры с обмотками, блок из двух орбитальных роторов, установленных в водиле и имеющих короткозамкнутые обмотки, тормозное устройство, включающее в себя обмотку тормоза, взаимодействующую с подпружиненным тормозным сердечником с тормозной накладкой и диском, установленным в подшипнике, фланец и корпус. Согласно изобретению блок роторов снабжен магнитопроводом с дополнительной обмоткой, размещенным в междуроторном пространстве, выводные концы дополнительной обмотки подсоединены к контактно-кольцевому узлу, состоящему из токосъемного устройства со щетками, установленного на фланце, и контактных колец, установленных на водиле, при этом роторы соединены механической связью в виде замкнутого гибкого элемента. Технический результат состоит в упрощении конструкции и в повышении надежности мотор-редуктора. 3 ил.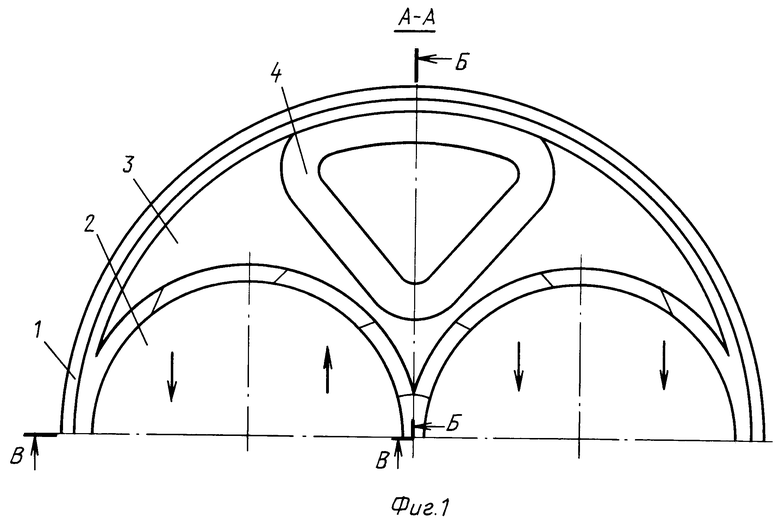
Орбитальный мотор-редуктор, преимущественно торцевого типа, содержащий внутренний и внешний статоры с обмотками, блок из двух орбитальных роторов, установленных в водиле и имеющих короткозамкнутые обмотки, тормозное устройство, включающие в себя обмотку тормоза, взаимодействующую с подпружиненным тормозным сердечником с тормозной накладкой и диском, установленным в подшипнике, фланец и корпус, отличающийся тем, что блок роторов снабжен магнитопроводом с дополнительной обмоткой, размещенным в междуроторном пространстве, выводные концы дополнительной обмотки подсоединены к контактно-кольцевому узлу, состоящему из токосъемного устройства со щетками, установленного на фланце, и контактных колец, установленных на водиле, при этом роторы соединены механической связью в виде замкнутого гибкого элемента.
| ОРБИТАЛЬНЫЙ МОТОР-РЕДУКТОР | 1994 |
|
RU2071631C1 |
| МОТОР-РЕДУКТОР | 1994 |
|
RU2074490C1 |
| Планетарный привод | 1990 |
|
SU1754990A1 |
| DE 4442102 А1, 04.07.1996 | |||
| DE 4421428 С1, 11.11.1997 | |||
| ЕР 0769839 А1, 23.04.1997. | |||
