Изобретение относится к электромеханике, преимущественно к области двухскоростного электропривода. Может быть использовано в подъемно-транспортных средствах - для реализации пониженной и повышенной скорости.
Известны двухскоростные мотор-редукторы описанные например в книге «Торцевые асинхронные электродвигатели интегрального изготовления» - М.: Энергоатомиздат, 1988 - 304 с. ил. ISBN 5-283-00496-1 автор Игнатов В.А., двигатель AG фирмы OYAKO, состоящего из низкоскоростного и высокоскоростного торцевых асинхронных самотормозящихся двигателей и редуктора. Ротор каждого двигателя установлен на валу с возможностью перемещения и подпружинен. Двигатели применяются для электропривода станков, подъемно-транспортных и конвейерных устройств. Недостатком этого мотор-редуктора является то, что необходимо использование двухскоростного (низкоскоростного и высокоскоростного) электродвигателей.
Наиболее близким по технической сущности является орбитальный мотор-редуктор, патент РФ 2 217 586 /A.M. Литвиненко - Орбитальный мотор-редуктор/ опубл. 27.11.2003, Н02K 41/06, з-ка 2001106414/09 от 06.03.2001. Орбитальный мотор-редуктор содержит внешний и внутренний статоры с обмотками, блок из двух орбитальных роторов, установленных в водиле и имеющих короткозамкнутые обмотки, тормозное устройство, включающее в себя обмотку тормоза, взаимодействующую с подпружиненным тормозным сердечником с тормозной накладкой и диском, установленным в подшипнике, фланец и корпус. Блок роторов снабжен магнитопроводом с дополнительной обмоткой, размещенным в междуроторном пространстве.
Недостатком данного аналога является то, что возможное рассогласование вращения составного ротора, вызванное различными электромагнитными моментами от внешнего и внутреннего статоров, компенсируется наличием гибкой связи, но не устраняется полностью.
Изобретение направлено на упрощение конструкции и устранение возможнсти проворачивания роторов при повышенной скорости.
Это достигается тем, что орбитальный мотор-редуктор, преимущественно торцевого типа содержащий внутренний и внешний статоры с обмотками, блок из орбитальных роторов, установленных в водиле, тормозное устройство, фланцы и корпус, согласно изобретению содержит датчики роторов-сателлитов и вала, выходы которых соединены с системой управления напряжением обмоток статоров.
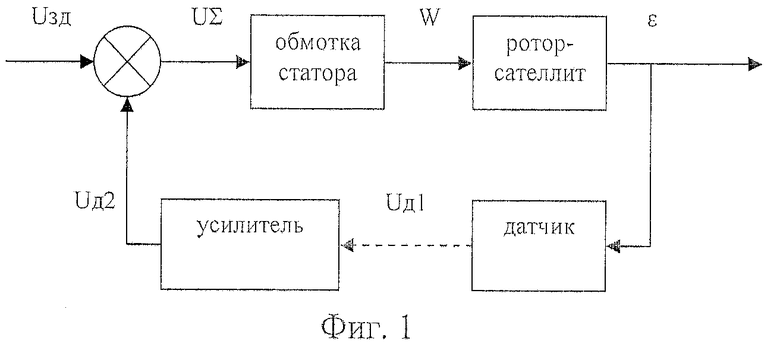
На фиг.1 показана функциональная схема работы мотор-редуктора с датчиком роторов-сателлитов. Где Uзд - задающее напряжение, поступающее на обмотки статоров; UΣ - управляющее напряжение; W - магнитный поток от статоров в роторам; ε - ускорение вращения ротора-сателлита; Uд1 - сигнал датчика по радио каналу; Uд2 - усиленный сигнал датчика. На фиг.2 - разрез вертикально-осевой плоскости орбитального мотор-редуктора.
Мотор-редуктор имеет корпус 1, дисковые торцевые якоря (роторы) - сателлиты 2, выходной вал 3, установленном в подшипниках 4, водило 5. На водиле 5 в подшипниках 6 установлены роторы-сателлиты 2. Введен тормоз, включающий в себя тормозной элемент - сердечник 7 с тормозной накладкой 8, взаимодействующей с катушкой 9 и пружиной 10. Накладка 8 взаимодействует с диском 11, который установлен в подшипнике 12, внутренняя часть диска 11 представляет собой венцовое зубчатое колесо внутреннего зацепления, которое взаимодействует с зубцами 13 ротора-сателлита 2. Ротор-сателлит имеет магнитопровод с короткозамкнутой обмоткой 14, которая находится в активной зоне внешнего и внутреннего торцевых статоров. На валу каждого ротора-сателлита установлены датчики 15, конструкция которых основана на использовании радиосвязи, передающие сигнал на блок управления напряжением обмоток статоров.
Устройство работает следующим образом. При пониженной скорости, катушка 9 включена, пружина 10 сжата, сердечник 7 с накладкой 8 тормозит диск 11, Таким образом, венцовое зубчатое колесо фиксируется относительно корпуса. Статоры 16 и 17 включены и в роторах 14 возникают вращающееся моменты. Роторы-сателлиты 2, обкатываются по венцовому зубчатому колесу, совершают орбитальное движение, приводя во вращение водило 5 - выходной вал 3. Сигналы с датчиков положения роторов-сателлитов 15 в установившемся режиме вращения равны нулю, в случае проворота или ускорения вращения роторов-сателлитов 2 возникает сигнал с датчиков 15, которые по средствам блока управления подают на обмотки статоров 16 и 17 соответствующее напряжение, увеличивающее или уменьшающее электромагнитный момент статора для стабилизации вращения роторов-сателлитов 2.
При повышенной скорости, в этом режиме тормоз выключен, катушка 9 обесточена. Пружина 10 отжимает тормозной элемент (сердечник 7 и накладку 8), освобождается диск с венцовым зубчатым колесом, который свободно вращается в подшипнике 12. Роторы 14 теперь являются составным ротором, который вращается согласно направленнию полей статоров 16 и 17. Оба заторможенных ротора 14 образуют составной ротор. Он вращает венцовое зубчатое колесо в подшипнике 12, таким образом, передаточное отношение от составного ротора к валу 3 равно единице, вал вращается с под синхронной скоростью. В данном режиме главная задача - не допустить проворачивание роторов 14. В случае возникновения поворота ротора-сателлита, на датчике 15 ротора-сателлита 2 возникает сигнал соответствующий повороту ротора-сателлита в направлении движения или против движения. Сигнал поступает на блок управления напряжением обмоток статоров 16 и 17, в случае поворота ротора-сателлита по направлению движения на обмотке внешнего статора 16 напряжение уменьшается до остановки ротора-сателлита, в случае поворота ротора-сателлита против направления движения на обмотке внешнего статора 16 напряжение увеличивается до остановки ротора-сателлита.
При переходе опять на пониженную скорость, переключения происходят в обратном порядке.
Датчик 15 ротора-сателлита 2 представляет собой бесконтактный акселерометр, который обеспечивает надежную работу измерительного устройства, такой датчик описан в книге «Измерение динамических моментов в электроприводах переменного тока», М.М. Соколов, Л.Б. Масандилов, М. «Энергия» 1975 г. 184 с. с ил. Конструкция бесконтактного акселерометра проще, чем контактных из-за наличия в последнем токосъемных устройств. Акселерометр с радиопередатчиком жестко крепится к валу ротора-сателлита, а радиоприемная и регистрирующая аппаратура находится в стационарных условиях, например на. корпусе и совместно образуют блок управления напряжением катушек статоров. Питание датчика 15 осуществляется генератором встроенным в радиоакслерометр.
Исследования углового ускорения ротора-сателлита происходит в окружении силовых электрических цепей, поэтому важное значение имеет вопрос помехозащищенности радиолинии от помех. Самой оптимальной для измерительной системы радиоакселерометра является область частот 15-30 МГц.
Модуляция частоты радиосигнала акслереометра осуществляется емкостным датчиком, включенным в колебательный контур задающего автогенератора передатчика. Так как радиопередатчик расположен на валу аксеолерометра и при измерениях вращается, то к нему предъявляются следующие основные требования: малые габариты и масса, малое потребление энергии, вибропрочность конструкции, симметричное выполнение излучателя. Передатчик может быть выполнен на одном транзисторе, что позволит совместить в одном: звене функции модулятора, автогенератора и усилителя мощности.
Преимущество изобретения состоит в том, что исключен механический фиксатор роторов, который не отслеживал изменения положения роторов-сателлитов, а тем самым и изменения скорости вращения вала от номинального значения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОРБИТАЛЬНЫЙ МОТОР-РЕДУКТОР | 2009 |
|
RU2428782C2 |
| ОРБИТАЛЬНЫЙ МОТОР-РЕДУКТОР | 2001 |
|
RU2217856C2 |
| ОРБИТАЛЬНЫЙ ШАГОВЫЙ МОТОР-РЕДУКТОР | 2001 |
|
RU2215358C2 |
| ОРБИТАЛЬНЫЙ МОТОР-РЕДУКТОР | 1994 |
|
RU2071631C1 |
| МОТОР-РЕДУКТОР | 1994 |
|
RU2074490C1 |
| Статор орбитальной электрической машины | 2015 |
|
RU2646619C2 |
| Мотор-колесо транспортного средства | 2024 |
|
RU2830225C1 |
| Мотор-колесо транспортного средства | 2023 |
|
RU2813165C1 |
| МОТОР-КОЛЕСО | 2017 |
|
RU2655098C1 |
| МОТОР-РЕДУКТОР | 2000 |
|
RU2171526C1 |
Изобретение относится к электромеханике, преимущественно к области двухскоростного электропривода. В мотор-редукторе, а именно на его роторы-сателлиты жестко крепятся радио-датчики - бесконтактные акселераторы, соединенные с системой управления напряжением обмоток статоров. При этом в мотор-редукторе может реализовываться двухскоростной режим работы. Основное преимущество устройства заключается в возможности избежать рассогласование вращения составного ротора, вызванное различными электромагнитными моментами от внешнего и внутреннего статоров. 2 ил.
Орбитальный мотор-редуктор преимущественно торцевого типа, содержащий внутренний и внешний статоры с обмотками, блок из орбитальных роторов-сателлитов с валами, установленных в водиле, тормозное устройство, фланцы и корпус, отличающийся тем, что на валу роторов-сателлитов расположены датчики - бесконтактные акселерометры, выходы которых соединены с системой управления напряжением обмоток статоров.
| Способ подготовки газа к транспортировке | 2002 |
|
RU2217586C2 |
| ОВЧИННИКОВ И.Е., ЛЕБЕДЕВ Н.И | |||
| Бесконтактные двигатели постоянного тока | |||
| - Л.: Наука, Ленинградское отделение, 1979, с.130-131 | |||
| US 6160328 А1, 12.12.2000 | |||
| JP 2000060104 А, 25.02.2000. | |||

