Изобретение относится к силовым системам управления летательных аппаратов и наиболее целесообразно может быть использовано в электропневматических рулевых приводах и автопилотах малогабаритных управляемых снарядов и ракет.
Известен электропневматический рулевой привод [1, 2, 3], применяемый в качестве исполнительного устройства систем управления летательными аппаратами, принятый в качестве аналога. Рулевой электропневматический привод [1, рис.2.5; 2, рис.2.1; 3, рис.3.4] представляет собой замкнутую автоматическую систему. В состав привода входят сумматор, усилитель, электромеханический преобразователь, пневматическое распределительное устройство, пневматический исполнительный двигатель и потенциометрический датчик обратной связи.
В силу большой сжимаемости газа динамические характеристики электропневматических рулевых приводов [1, стр.148, 1-й абзац снизу, стр.149] значительно изменяются при изменении величины и характера нагрузки. Этот основной недостаток электропневматических рулевых приводов сужает область их применения, где от привода требуются высокие динамические качества и стабильность работы в условиях изменяющейся нагрузки (моментов трения, шарнирного, демпфирующего и динамического). Об этом основном недостатке пневматических приводов отмечается также в источниках информации [2, стр.35, 1-й абзац снизу; 3, стр.125, 2-й абзац снизу].
Отличительной особенностью пневмоприводов является тот факт, что у них передаточная функция содержит в знаменателе колебательное звено с малым коэффициентом демпфирования ξпп≤1 [3, стр.127; 2, стр.51]. На собственной частоте колебательного звена резонансный всплеск составляет величину 1/2ξпп.
Одним из существенных факторов, влияющих на динамику пневмопривода, является малая величина коэффициента ξпп колебательного звена, входящего в передаточную функцию разомкнутого контура электропневматического рулевого привода. Именно она ограничивает увеличение коэффициента усиления разомкнутого контура привода, а следовательно, статическую и динамическую точность отработки приводом заданных сигналов управления.
На величину ξпп оказывает сильное влияние трение, которое всегда присутствует в любом газовом приводе, так как сжатый воздух и любой иной газ, в отличие от жидкости, не обладают смазывающими свойствами [3, стр.141, 3-5-й абзацы сверху].
В источниках информации [2, 3] подробно рассмотрено влияние на логарифмические амплитудно-фазовые частотные характеристики разомкнутого и замкнутого электропневматических рулевых приводов коэффициента демпфирования привода ξпп, даны математические зависимости для расчета параметров математической модели привода, в том числе и коэффициента демпфирования ξпп [2, глава 2; 3, глава 3].
Известен электропневматический рулевой привод управляемого снаряда [4], принятый за прототип. Он содержит последовательно соединенные блок задания, блок вычитания, первый вход которого является входом задания привода, корректирующий фильтр, релейный элемент, усилитель мощности, управляющий электромагнит и исполнительный пневмодвигатель, выход которого является выходом привода и подключен через датчик обратной связи ко второму входу блока вычитания, через дифференцирующее звено с инвертированием сигнала - ко второму входу релейного элемента и через инвертор - к третьему входу релейного элемента, выход блока задания подключен к четвертому входу релейного элемента. Недостатками известного электропневматического рулевого привода являются недостаточно высокая точность отработки импульсного сигнала управления (сравнительно большие время переходного процесса и перерегулирование) и точность удержания нулевого положения рулей при отсутствии сигнала управления, сравнительно большая амплитуда автоколебаний рулей.
Как справедливо отмечается [4, 10-я колонка, 2-й абзац сверху], введение отрицательной обратной связи по скорости угла поворота рулей через дифференцирующее звено позволяет действительно существенно повысить демпфирующие свойства электропневматического привода и уменьшить перерегулирование без заметного ущерба для снижения частоты автоколебаний. Введение этой связи физически эквивалентно увеличению демпфирования привода за счет введения момента сопротивления повороту (вязкого трения), пропорционального скорости угла поворота рулей, что является важным стабилизирующим фактором в целях уменьшения отрицательного влияния на выходные параметры слабодемпфированных пневматических приводов. Так, например, исключение отрицательной обратной связи по скорости в известном приводе [4] приводит из-за слабого демпфирования пневматического привода к резкому и недопустимому увеличению амплитуды автоколебаний до величины, близкой к линейной зоне по углу отклонения рулей на некоторых режимах работы привода, к существенному увеличению при этом перерегулирования привода при отработке заднего фронта импульсного сигнала управления. Введение отрицательной обратной связи по скорости позволяет существенно улучшить эти характеристики. Однако при дальнейшем увеличении коэффициента обратной связи по скорости наступает момент, когда переходный процесс вместо колебательного с определенным перерегулированием становится апериодическим, что приводит к недопустимому увеличению времени срабатывания (отпускания) привода при отработке заднего фронта импульса управления, т.е. существуют определенные физические пределы допустимого изменения в сторону увеличения коэффициента отрицательной обратной связи по скорости, определяемые при математическом моделировании привода и уточняемые экспериментально по результатам исследований макетных и опытных образцов приводов.
Задачей предлагаемого изобретения является повышение демпфирования электропневматического рулевого привода управляемого снаряда, повышение качества переходного процесса (уменьшение времени переходного процесса, уменьшение перерегулирования), повышение точности, как при отработке рулевым приводом импульсных сигналов управления, так и при работе привода в режиме удержания нулевого положения рулей при отсутствии импульсных сигналов управления, т.е. тем самым устранения недостатков известных электропневматических рулевых приводов [1-4].
Указанная задача достигается за счет того, что в электропневматический рулевой привод управляемого снаряда, содержащий последовательно соединенные блок задания, блок вычитания, первый вход которого является входом задания привода, корректирующий фильтр, релейный элемент, усилитель мощности, управляющий электромагнит и исполнительный пневмодвигатель, выход которого является выходом привода и подключен через датчик угла поворота рулей ко второму входу блока вычитания, к входу дифференцирующего звена с инвертированием сигнала и через инвертор - к третьему входу релейного элемента, выход блока задания подключен к четвертому входу релейного элемента, последовательно с дифференцирующим звеном введено нелинейное звено с линейной статической характеристикой с регулируемой зоной нечувствительности в соответствии с зависимостью
Uн=К•Кдос•δ,
где Uн - величина зоны нечувствительности нелинейного звена;
δ - угол поворота рулей;
Кдос - коэффициент передачи датчика угла поворота рулей;
К - масштабный коэффициент, выбираемый из условия обеспечения требуемого демпфирования привода при отработке импульсных сигналов управления,
при этом второй вход нелинейного звена соединен с выходом датчика угла поворота рулей, а выход - со вторым входом релейного элемента.
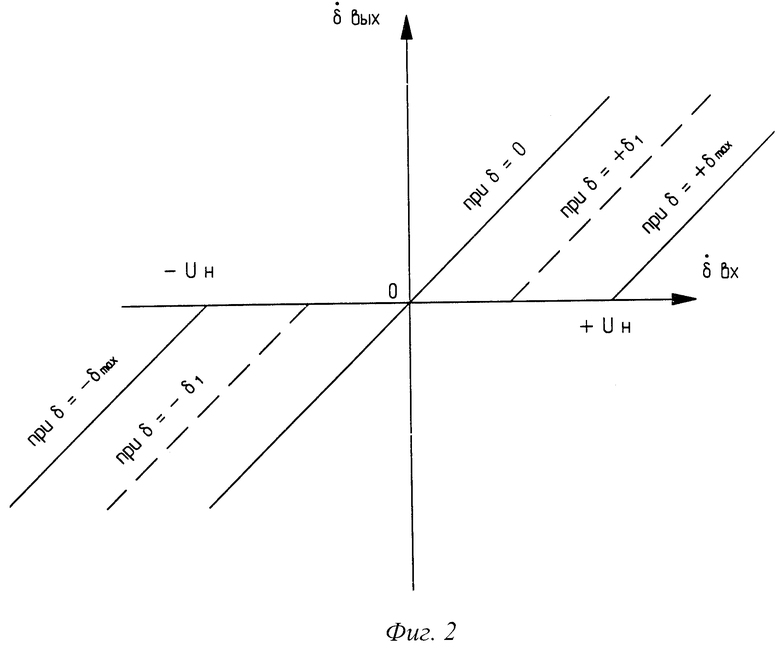
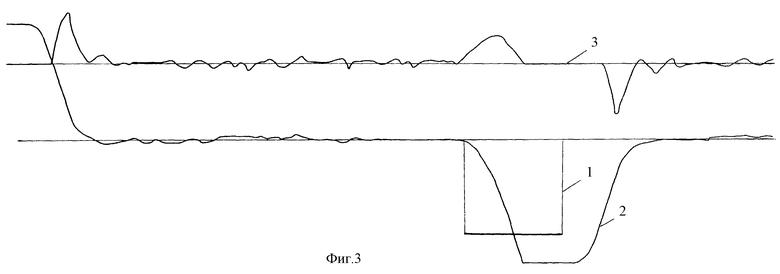
Нa фиг.1 представлена принципиальная схема электропневматического рулевого привода управляемого снаряда, на фиг.2 - статическая характеристика нелинейного звена с регулируемой зоной нечувствительности, на фиг.3 - типовая осциллограмма отработки электропневматическим рулевым приводом импульсного сигнала управления.
Схема на фиг.1 содержит блок вычитания и корректирующий фильтр, выполненные в виде единого блока 1, релейный элемент 2, привод 3 в составе усилителя мощности 4, управляющего электромагнита 5 и исполнительного пневмодвигателя 6, датчик угла поворота рулей 7, блок задания 8, дифференцирующее звено 9, нелинейное звено 10 с регулируемой зоной нечувствительности, инвертор 11. Uз - сигнал управления (задания) электропневматического рулевого привода, δ - угол поворота рулей, Uос - сигнал обратной связи.
Корректирующий фильтр интегродифференцирующего типа с преобладанием интегрирования на высоких частотах (на частотах автоколебаний) с передаточной функцией
где Т1, Т2 - постоянные времени фильтра с соотношением Т2>Т1.
Блок вычитания сигналов задания и обратной связи схемно совмещен с корректирующим фильтром, выполненным на операционном усилителе ОУ1, в прямой цепи которого включен резистор R1, а в цепи отрицательной обратной связи - резистор R2, параллельно которому включены цепочка из последовательно соединенных резистора R3 и интегрирующего конденсатора С1, а также ограничительный элемент, выполненный в виде двух встречно включенных стабилитронов VД1 и VД2.
Релейный элемент 2 выполнен в виде линейного усилителя-ограничителя на операционном усилителе ОУ2, охваченного положительной обратной связью через дифференцирующее звено на операционном усилителе ОУ3.
Дифференцирующее звено 9 в цепи отрицательной обратной связи по скорости угла поворота рулей выполнено на операционном усилителе ОУ4, инвертор 11 - на операционном усилителе ОУ5.
Нелинейное звено 10 с линейной статической характеристикой с регулируемой зоной нечувствительности выполнено на пяти операционных усилителях ОУ6-ОУ10 в виде двух цепочек, суммирующего элемента и двух однополупериодных выпрямителей. Первая цепочка выполнена на операционном усилителе ОУ8, вторая - на усилителе ОУ9, суммирующий элемент - на усилителе ОУ10, первый однополупериодный выпрямитель - на усилителе ОУ6, второй - на усилителе ОУ7. Uоп 1 - опорное напряжение на выходе первого однополупериодного выпрямителя, Uоп 2 - второго.
Инвертирующие входы операционных усилителей ОУ8, ОУ9 цепочек соответственно через резисторы R22, R27 соединены с выходом дифференцирующего звена 9, в цепи отрицательной обратной связи усилителей ОУ8, ОУ9 включены параллельно две ветви, одна из которых содержит последовательно соединенные резистор R26 и диод УД8 в прямом направлении, вторая - резистор R25 и диод VД7 в обратном направлении, общие точки соединения резистора R25 и катода диода VД7 первой цепочки, резистора R30 и анода диода VД9 второй цепочки подключены соответственно через резистор R32 к первому и через резистор R33 к второму входам суммирующего элемента на операционном усилителе ОУ10, выход которого является выходом нелинейного звена 10 с линейной статической характеристикой с регулируемой зоной нечувствительности и подключен к второму входу через резистор R12 релейного элемента 2.
Инвертирующие входы операционных усилителей ОУ6, ОУ7 однополупериодных выпрямителей соответственно через последовательно соединенные резистор R18 и диод VД5 в прямом направлении, резистор R20 и диод VД6 в обратном направлении и общий резистор R17 подключены к выходу датчика обратной связи 7, в цепи отрицательной обратной связи операционных усилителей выпрямителей включены соответственно резисторы R19, R21, выходы первого и второго выпрямителей соответственно через резисторы R28, R24 соединены с инвертирующими входами операционных усилителей ОУ9, ОУ8 второй и первой цепочек, а общие точки соединения резистора R18 и катода диода VД5 первого выпрямителя, резистора R20 и анода диода VД6 второго через резисторы R23, R29 соответственно соединены с инвертирующими входами операционных усилителей ОУ8, ОУ9 первой и второй цепочек.
Устройство работает следующим образом.
При отсутствии сигнала управления в замкнутом контуре электропневматического рулевого привода вследствие отрицательной обратной связи и релейного элемента устанавливаются автоколебания, частота и амплитуда которых определяются параметрами линейной части и релейного элемента. На выходе релейного элемента при этом существуют прямоугольные колебания 50%-ной скважности частоты автоколебаний. Якорь управляющего электромагнита, поршень исполнительного пневмодвигателя и связанные с ним рули колеблются с частотой автоколебаний около нулевого среднего значения. Учитывая, что линейная часть электропневматического рулевого привода является фильтром низкой частоты, на выходе привода сигнал автоколебаний имеет форму, близкую к синусоидальной. В цепи ошибки замкнутого контура включен корректирующий фильтр интегродифференцирующего типа с преобладанием интегрирования на частотах автоколебаний. На выходе корректирующего фильтра амплитуда автоколебаний уменьшается на величину амплитудного ослабления фильтра на частоте автоколебаний, чем достигается увеличение коэффициента передачи релейного элемента (точности удержания рулей в нулевом положении после отключения импульсного сигнала управления).
При подаче импульсного сигнала управления на вход привода этот сигнал поступает одновременно без преобразования в корректирующем фильтре на вход релейного элемента через резистор R9. Поскольку приведенный ко входу релейного элемента уровень сигнала задания (Uз•Кз, Кз=R5/R9 - масштабный коэффициент) существенно превышает уровень ограничения корректирующего фильтра, приведенного ко входу релейного элемента (Uогр кф•Когр, где Когр=R5/R4 - масштабный коэффициент), то с момента поступления сигнала задания на вход релейного элемента сигнал на выходе релейного элемента переключится скачком с 50%-ной скважности на 100%-ную и происходит отклонение рулей из нулевого среднего значения на максимальный угол (на упор) с максимальными скоростью и ускорением. С момента поступления сигнала на вход фильтра на выходе фильтра с крутым фронтом нарастает выходной сигнал, как реакция дифференцирующей части фильтра, определяемой постоянной времени Т1, на передний фронт импульсного входного сигнала, нарастание идет до величины, определяемой уровнем ограничения ограничительных элементов фильтра (встречно включенных стабилитронов VД1, VД2).
При отключении импульсного сигнала управления выходной сигнал фильтра с уровня ограничения будет уменьшаться сразу с крутым фронтом (за счет дифференцирующих свойств фильтра) и стремиться к нулевому положению. Под действием максимального сигнала обратной связи (так как в результате отработки сигнала управления рули находятся на упоре и сигнал с выхода датчика обратной связи будет иметь максимальное значение) рули будут перемещаться с упора в нулевое положение с перерегулированием, определяемым как реакция замкнутого контура привода на скачкообразное изменение входного импульсного сигнала (на выключение). При этом процесс движения рулей около нулевого среднего положения носит колебательный характер с затуханием, определяемым демпфирующими свойствами замкнутого контура привода. За счет введения ограничения в корректирующий фильтр сформирован необходимый противоимпульс управления, действующий в момент схода рулей с упора, что позволяет улучшить качество переходного процесса (уменьшить время переходного процесса) при перемещении рулей с упора в нулевое положение без снижения точности удержания рулей в нулевом положении.
Введение в управляющий сигнал на выходе релейного элемента сигнала угла поворота рулей, пропущенного через дифференцирующее звено с передаточной функцией
на операционном усилителе ОУ4 с одновременным инвертированием сигнала и через нелинейное звено с линейной статической характеристикой с регулируемой зоной нечувствительности в соответствии с зависимостью
Uн=К•Кдос•δ,
где Uн - величина зоны нечувствительности нелинейного звена;
δ - угол поворота рулей;
Кдос - коэффициент передачи датчика обратной связи;
К - масштабный коэффициент, выбираемый из условия обеспечения требуемого демпфирования привода при отработке импульсных сигналов управления,
позволяет существенно повысить демпфирующие свойства привода и за счет этого уменьшить перерегулирование без заметного ущерба для снижения частоты автоколебаний.
Статическая характеристика нелинейного звена с линейной статической характеристикой с регулируемой пропорционально углу поворота рулей зоной нечувствительности приведена на фиг.2. Необходимое значение масштабного коэффициента К для достижения требуемого демпфирования переходного процесса привода при отработке импульсных сигналов управления обеспечивается масштабным коэффициентом, равным отношению резисторов R5/R12, на входе релейного элемента. Резисторы R18, R19 и R20, R21 выбираются равными между собой для каждого из однополупериодных выпрямителей, т.е. по сути дела реализуются инверторы, один на операционном усилителе ОУ6, второй на усилителе ОУ7. В связи с тем, что демпфирующие свойства привода при движении рулей с упоров в нулевое положение при отработке импульсных сигналов управления могут быть разными, то это потребует необходимости иметь разные величины зоны нечувствительности нелинейного звена при одном и том же значении угла поворота рулей |+δ1| = |-δ1|. Разные величины зоны нечувствительности нелинейного звена +Uн и -Uн обеспечиваются за счет разных величин резисторов R18 и R20 с сохранением при этом равенства R18=R19 и R20=R21.
Физический смысл введения нелинейной отрицательной обратной связи по скорости угла поворота рулей в предлагаемом техническом решении по сравнению с известным [4] с линейной отрицательной обратной связью по скорости заключается в следующем. С помощью нелинейной обратной связи по скорости за счет введения нелинейного звена с регулируемой автоматически пропорционально углу поворота рулей зоной нечувствительности реализован закон управления движением рулей с упоров в нулевое положение таким образом, что максимальные демпфирующие свойства привода обеспечиваются около нулевого положения рулей, т. е. именно там, где это необходимо обеспечить в максимальной мере. В этом положении зоны нечувствительности нет, а необходимое демпфирование переходного процесса привода выполняется за счет выбора соответствующего значения коэффициента K=R5/R12 схемы с обеспечением при этом движения рулей с упоров в нулевое положение с максимальной скоростью, т.к. на упоре значение зоны нечувствительности по скорости будет максимальным, а по мере уменьшения угла поворота рулей зона нечувствительности будет уменьшаться и достигать нулевого значения при угле поворота рулей δ=0. За счет этого обеспечивается уменьшение времени переходного процесса, уменьшение перерегулирования при отработке заднего фронта импульсных сигналов управления, т.е. повышается точность отработки заданных сигналов управления.
В известной схеме [4] привода величина сигнала скоростной обратной связи не зависит от угла поворота рулей. Выбор большей глубины отрицательной обратной связи по скорости для обеспечения требуемого демпфирования переходного процесса при отработке заднего фронта импульсных сигналов управления приводит к недопустимой затяжке по времени переходного процесса из-за отрицательного влияния сигнала обратной связи по скорости при снятии и движении рулей с упора, т.к. этот сигнал вследствие отрицательной обратной связи вычитается из основного (сигнала противоимпульса управления).
В предлагаемой схеме на фиг.1 величина сигнала отрицательной обратной связи по скорости угла поворота рулей определяется величиной
где  - величина сигнала отрицательной обратной связи по скорости угла поворота рулей;
- величина сигнала отрицательной обратной связи по скорости угла поворота рулей;
К=R5/R12 - масштабный коэффициент;
Uн = f(δ) = K•Kдос•δ - величина зоны нечувствительности нелинейного звена.
Из анализа зависимости  видно, что величина вводимого для демпфирования привода сигнала по скорости, определяемая превышением сигнала по скорости над пороговой величиной, определяемой зоной нечувствительности Uн нелинейного звена, пропорциональной углу поворота рулей, является максимальной в области нулевых значений угла поворота рулей, где величина зоны Uн является минимальной (Uн= 0). Видно, что глубину обратной связи по скорости можно увеличивать без ущерба для уменьшения скорости движения рулей с упоров в нулевое положение, поскольку превышение скорости над зоной в области больших углов δ из-за большой величины зоны нечувствительности Uн на этих углах будет минимальным, а значит будет оказываться при этом минимальное влияние на уменьшение скорости привода.
видно, что величина вводимого для демпфирования привода сигнала по скорости, определяемая превышением сигнала по скорости над пороговой величиной, определяемой зоной нечувствительности Uн нелинейного звена, пропорциональной углу поворота рулей, является максимальной в области нулевых значений угла поворота рулей, где величина зоны Uн является минимальной (Uн= 0). Видно, что глубину обратной связи по скорости можно увеличивать без ущерба для уменьшения скорости движения рулей с упоров в нулевое положение, поскольку превышение скорости над зоной в области больших углов δ из-за большой величины зоны нечувствительности Uн на этих углах будет минимальным, а значит будет оказываться при этом минимальное влияние на уменьшение скорости привода.
Типовая осциллограмма отработки электропневматическим рулевым приводом импульсного сигнала управления приведена на фиг.3, где 1 - сигнал управления, 2 - сигнал обратной связи (угол поворота рулей δ), 3 - сигнал обратной связи по скорости угла поворота рулей с выхода нелинейного звена с регулируемой пропорционально углу поворота рулей зоной нечувствительности.
Все эти отмеченные достоинства предлагаемого технического решения позволили обеспечить в электропневматическом рулевом приводе с импульсными сигналами управления перспективных управляемых снарядов требуемые динамические и точностные характеристики в широком диапазоне изменения шарнирных нагрузок (от пружинной до перекомпенсации) и развиваемых моментов исполнительного пневмодвигателя привода, использующего энергию набегающего потока воздуха, в широком диапазоне скоростей полета управляемого снаряда, например, артиллерийского снаряда с головкой самонаведения.
Таким образом, предлагаемое техническое решение по сравнению с известным позволяет повысить быстродействие (уменьшить время движения рулей с максимального угла поворота рулей, с упоров, в нулевое положение и обеспечить отработку максимального угла поворота рулей, по упорам, при отработке приводом импульсных сигналов управления), улучшить параметры переходного процесса (уменьшить время переходного процесса, уменьшить перерегулирование, уменьшить статическую ошибку) при повороте рулей с упора в нулевое положение при отключении импульсного сигнала управления и в результате повысить точность отработки электропневматическим рулевым приводом импульсных сигналов управления и точность удержания нулевого положения рулей при отсутствии (при отключении) импульсных сигналов управления практически без заметного увеличения массы и габаритов аппаратуры в управляемом снаряде.
Источники информации
1. Костин С.В., Петров Б.И., Гамынин Н.С. Рулевые приводы. М.: Машиностроение, 1973.
2. Пневмопривод систем управления летательных аппаратов. Под общей редакцией В.А. Чащина. М.: Машиностроение, 1987.
3. Крымов Б.Г., Рабинович Л.В., Стеблецов В.Г. Исполнительные устройства систем управления летательными аппаратами. М.: Машиностроение, 1987.
4. Способ управления электропневматическим рулевым приводом управляемого снаряда и устройство для его реализации. RU, патент 2138767, кл. 6 F 42 В 15/01, G 05 B 11/16, бюл. 27, 27.09.99.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2138767C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2206861C2 |
| АВТОКОЛЕБАТЕЛЬНЫЙ АВТОПИЛОТ УПРАВЛЯЕМОГО СНАРЯДА | 1996 |
|
RU2115086C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ АВТОПИЛОТ УПРАВЛЯЕМОГО СНАРЯДА | 1993 |
|
RU2081446C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ АВТОПИЛОТ УПРАВЛЯЕМОГО СНАРЯДА | 1997 |
|
RU2117324C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2005 |
|
RU2288441C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ АВТОПИЛОТ УПРАВЛЯЕМОГО СНАРЯДА | 1992 |
|
RU2092784C1 |
| РЕЛЕЙНЫЙ ПНЕВМОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМЫ УПРАВЛЕНИЯ РАКЕТЫ | 2007 |
|
RU2337309C1 |
| Способ пропорционального управления воздушно-динамическим рулевым приводом ракеты и устройство для его реализации | 2016 |
|
RU2630462C1 |
| РЕЛЕЙНЫЙ ПНЕВМО-ГИДРОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2003 |
|
RU2243491C1 |
Изобретение относится к оборонной технике, к управляемым снарядам и ракетам. Технический результат - повышение демпфирования электропневматического рулевого привода управляемого снаряда, повышение качества переходного процесса, повышение точности при отработке рулевым приводом импульсных сигналов управления. Электропневматический рулевой привод управляемого снаряда содержит последовательно соединенные блок задания, блок вычитания, первый вход которого является входом задания привода, корректирующий фильтр, релейный элемент, усилитель мощности, управляющий электромагнит и исполнительный пневмодвигатель, выход которого является выходом привода и подключен через датчик угла поворота рулей ко второму входу блока вычитания, к входу дифференцируемого звена с инвертированием сигнала и через инвертор - к третьему входу релейного элемента. Выход блока задания подключен к четвертому входу релейного элемента, последовательно с дифференцирующим звеном введено нелинейное звено с линейной статической характеристикой с регулируемой зоной нечувствительности, при этом второй вход нелинейного звена соединен с выходом датчика угла поворота рулей, а выход - со вторым входом релейного элемента. 3 ил.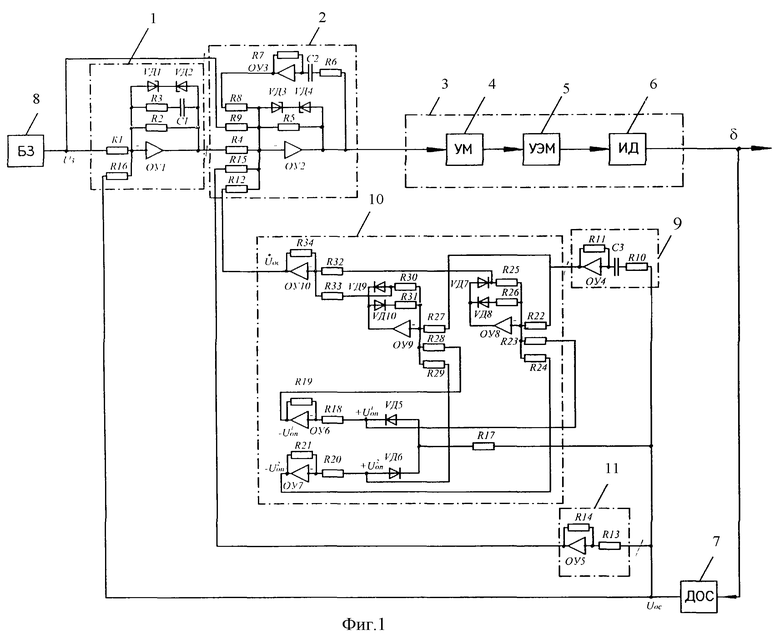
Электропневматический рулевой привод управляемого снаряда, содержащий последовательно соединенные блок задания, блок вычитания, первый вход которого является входом задания привода, корректирующий фильтр, релейный элемент, усилитель мощности, управляющий электромагнит и исполнительный пневмодвигатель, выход которого является выходом привода и подключен через датчик угла поворота рулей ко второму входу блока вычитания, к входу дифференцирующего звена с инвертированием сигнала и через инвертор - к третьему входу релейного элемента, выход блока задания подключен к четвертому входу релейного элемента, отличающийся тем, что в него последовательно с дифференцирующим звеном введено нелинейное звено с линейной статической характеристикой с регулируемой зоной нечувствительности в соответствии с зависимостью
UН=К·КДОС.·δ,
где UН - величина зоны нечувствительности нелинейного звена;
δ - угол поворота рулей;
КДОС - коэффициент передачи датчика угла поворота рулей;
К - масштабный коэффициент, выбираемый из условия обеспечения требуемого демпфирования привода при отработке импульсных сигналов управления, при этом второй вход нелинейного звена соединен с выходом датчика угла поворота рулей, а выход - со вторым входом релейного элемента.
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2138767C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 1993 |
|
RU2079806C1 |
| СПОСОБ ПОВЫШЕНИЯ ПРОДУКТИВНОСТИ МОЛОДНЯКА КРОЛИКОВ | 2018 |
|
RU2694626C1 |
| DE 4135557 А1, 06.05.1993. | |||

