Изобретение относится к приборостроению и может применяться при построении гироскопических устройств с колеблющимися массами, а именно волновых твердотельных гироскопов.
Известен пьезоэлектрический дисковый гироскоп (ПДГ) [1], содержащий резонатор из пьезоэлектрического материала в форме диска, на верхней поверхности которого выполнены сегментные электроды, а на нижней - сплошной общий электрод. ПДГ содержит также устройство возбуждения резонатора, состоящее из генераторной схемы, объединенной со схемой автоматической регулировки усиления (АРУ), и первого усилителя заряда (УЗ). Кроме того, ПДГ содержит устройство для измерения угловой скорости, состоящее из второго УЗ и устройства обратной связи, соединенного с устройством индикации угловой скорости. Все вышеперечисленные электронные устройства определенным образом подключены к сегментным электродам. Прямой мерой угловой скорости является выходное напряжение устройства обратной связи.
Недостатком данного ПДГ является низкая чувствительность, т.к. информационный сигнал в нем ослабляется компенсационным.
Известен также ПДГ [2], содержащий дисковый пьезоэлектрический резонатор, в котором имеется несколько, а именно восемь, областей с противоположной поляризацией, которые расположены симметрично относительно оси чувствительности гироскопа и которые служат его электродами, причем диаметрально расположенные электроды соединены друг с другом. Две пары рядом расположенных электродов используются в качестве электродов обратной связи, а две другие пары электродов выполняют одновременно три функции: возбуждающих, компенсирующих и информационных электродов. Электронная часть известною ПДГ содержит блок возбуждения резонатора, в состав которого входят дифференциальный усилитель (ДУ), АРУ, полосовой фильтр (ПФ), устройство компенсации вращения волны (УКВВ) и некоторые другие функциональные устройства. Кроме того, в электронную часть ПДГ входит блок измерения угловой скорости, который содержит сумматор, ДУ, формирователь прямоугольного напряжения (ФПН), фазочувствительный выпрямитель (ФЧВ), фильтр низких частот (ФНЧ) и усилитель напряжения (УН). Помимо этого известный ПДГ содержит контур стабилизации тока возбуждения.
Недостатком данного ПДГ, принятого за прототип, является его низкая чувствительность и точность, обусловленная тем, что информационный сигнал малой амплитуды наложен на возбуждающий сигнал большой амплитуды, что затрудняет его выделение. Кроме того, информационный сигнал ослабляется компенсационным. Дополнительным недостатком является сложность электронной части ПДГ, обусловленная применением в нем большого числа элементов. Например, в известном ПДГ для поддержания стабильного масштабного коэффициента предусмотрена стабилизация тока возбуждения резонатора, а с другой стороны, осуществляется прямая коррекция масштабного коэффициента в дополнение к токовой компенсации путем масштабирования выходного сигнала в соответствии с измеряемым на пьезоэлементе средним током, и, таким образом, корректируются изменения пьезокоэффициента. То есть в прототипе по существу предусмотрены два контура стабилизации масштабного коэффициента, которые фактически выполняют противоположные задачи: с одной стороны, осуществляют стабилизацию тока возбуждения, а с другой стороны, - его изменение.
Задачами, на решение которых направлено изобретение, являются повышение чувствительности и точности гироскопа с одновременным его упрощением за счет снижения количества элементов в электронной части.
Поставленные задачи достигаются за счет того, что в пьезоэлектрическом дисковом гироскопе, содержащем резонатор, на котором выполнено несколько равноудаленных друг от друга и расположенных симметрично относительно оси чувствительности гироскопа электродов, устройство компенсации вращения волны, блок возбуждения резонатора, включающий устройство автоматической регулировки усиления и полосовой фильтр, блок измерения угловой скорости, включающий сумматор, дифференциальный усилитель, формирователь прямоугольного напряжения, фазочувствительный выпрямитель, фильтр низких частот и усилитель напряжения, вход которого соединен с выходом фильтра низких частот, первый и торой входы сумматора соединены соответственно с первым и вторым входами дифференциального усилителя, выход которого соединен со вторым входом фазочувствительного выпрямителя, первый вход которого соединен с выходом формирователя прямоугольного напряжения, вход которого соединен с выходом сумматора, электроды функционально разделены на четыре группы: электроды обратной связи, возбуждающие, компенсационные и информационные.
Причем оси симметрии возбуждающих электродов и электродов обратной связи ортогональны друг к другу, оси симметрии компенсационных и информационных электродов в своих группах ортогональны друг к другу и сдвинуты относительно осей симметрии электродов обратной связи и возбуждающих электродов на угол 45o, устройство компенсации вращения волны содержит первый усилитель заряда, вход которого соединен с первым компенсационным электродом, а выход - со вторым компенсационным электродом, блок возбуждения резонатора содержит второй усилитель заряда, вход которого соединен с группой электродов обратной связи, а выход - со входом устройства автоматической регулировки усиления, выход которого соединен с первым входом полосового фильтра, второй вход которого соединен с выходом сумматора, а выход - с группой электродов возбуждения, блок измерения угловой скорости содержит третий и четвертый усилители заряда, причем первый информационный электрод соединен с входом третьего усилителя заряда, выход которого соединен с первыми входами сумматора и дифференциального усилителя, а второй информационный электрод соединен с входом четвертого усилителя заряда, выход которого соединен со вторыми входами сумматора и дифференциального усилителя, выход фазочувствительного выпрямителя соединен с входом фильтра низких частот.
К отличительным признакам предложенного гироскопа относится функциональное разделение всех электродов резонатора на четыре группы: электроды обратной связи, возбуждающие, компенсационные и информационные, причем каждая группа электродов выполняет, в отличие от прототипа, только одну, присвоенную ей, функцию. Такое функциональное разделение электродов, наряду с их конкретным расположением на резонаторе относительно друг друга, позволяет более точно выделить информационный сигнал, т.к. в этом случае влияние возбуждающего и компенсационного сигналов на информационный сведено к минимуму, что повышает чувствительность и точность гироскопа.
К отличительным признакам заявленного решения относится и введение четырех УЗ и сопутствующих им связей с другими элементами электронной части ПДГ, а также подключение выхода сумматора к второму входу ПФ. Первый УЗ выполняет роль УКВВ, что существенно упрощает схему по сравнению с прототипом. Второй УЗ усиливает сигнал с электродов обратной связи и подает его на вход АРУ. Стабильность масштабного коэффициента определяется стабильностью амплитуды колебаний первичной волны. Поэтому в предложенном решении устройство АРУ стабилизирует напряжение первого УЗ, пропорциональное току, генерируемому на электродах обратной связи, который, в свою очередь, пропорционален амплитуде первичной волны. Такой подход приводит к значительному сокращению функциональных устройств электронной части гироскопа, а следовательно, приводит к его упрощению. Входы третьего и четвертого УЗ подключены к информационным электродам, которые не задействованы в блоке возбуждения и УКВВ и поэтому полностью воспроизводят информационный сигнал о величине угловой скорости (силе Кориолиса), благодаря чему, как уже указывалось выше, существенно повышается чувствительность и точность ПДГ.
Следует отметить, что УКВВ, наряду с компенсацией вращения вторичной волны, которое происходит при воздействии сил Кориолиса на резонатор при его вращении, производит начальный поворот первичной волны, совмещая оси эллипса этой волны с осями симметрии возбуждающих электродов, что приводит к уменьшению величины нулевого сигнала, который возникает из-за асимметрии конструкции резонатора. Однако при этом не происходит полной компенсации нулевого сигнала вследствие того, что на каждом узловом электроде образуются неодинаковые заряды, что может быть вызвано, например, асимметрией электродов относительно оси чувствительности. Поэтому в предложенном решении предусмотрена дополнительная компенсация нулевого сигнала, для чего сигнал с выхода сумматора подается на второй вход ПФ, что приводит к дополнительному повороту волны, уменьшению нулевого сигнала и, как следствие, дополнительно способствует повышению точности ПДГ.
Предлагаемый ПДГ иллюстрируется чертежами.
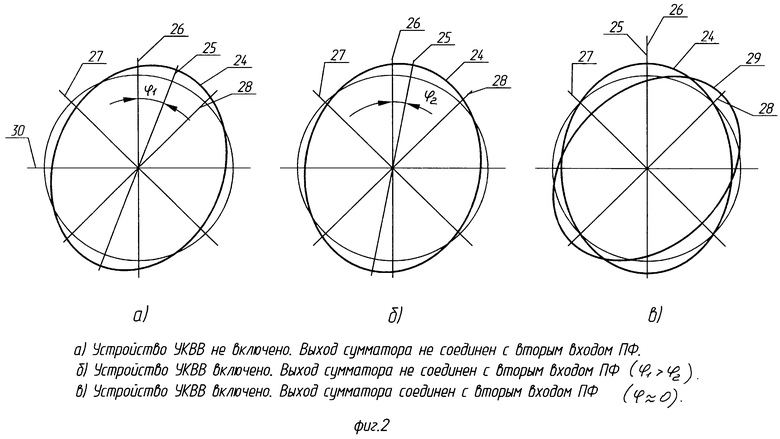
На фиг. 1 показана структурная схема ПДГ. На фиг.2 показан один полупериод колебаний первичной и вторичной волны.
ПДГ (фиг.1) содержит резонатор 9 из пьезоэлектрического материала, например цинкита, в форме диска, на поверхности которого сформированы восемь равноудаленных друг от друга и расположенных симметрично оси чувствительности гироскопа (аксиальной оси диска) сегментных электродов 1-8. Причем в резонаторе 9 функционально выделены четыре группы электродов: обратной связи 1, 5, возбуждающие 3, 7, компенсационные 2, 8 и информационные 4, 6. Оси симметрии 30, 26 (фиг. 2) электродов 1, 5 обратной связи и возбуждающих электродов 3, 7 ортогональны друг другу. Оси симметрии 27, 28 компенсационных 2, 8 и информационных 4, 6 электродов сдвинуты относительно осей симметрии электродов 1, 5 обратной связи и возбуждающих 3, 7 на угол 45o. Оси симметрии 27, 28 компенсационных 2, 8 и информационных 4, 6 электродов в своих группах ортогональны друг другу.
УКВВ содержит первый УЗ 10, вход которого соединен с первым компенсационным электродом 2, а выход - с вторым компенсационным электродом 8. Блок 11 возбуждения резонатора содержит второй УЗ 12, АРУ 13, ПФ 14, причем вход УЗ 12 соединен с электродами 1, 5 обратной связи, а выход - с входом АРУ 13, выход которого соединен с первым входом ПФ 14, выход которого соединен с электродами 3, 7 возбуждения.
Блок 15 измерения угловой скорости содержит третий УЗ 16 и четвертый УЗ 17, сумматор 18, ДУ 19, ФПН 20, ФЧВ 21, ФНЧ 22, УН 23, причем первый информационный электрод 4 соединен с входом третьего УЗ 16, выход которого соединен с первыми входами сумматора 18 и ДУ 19. Второй информационный электрод 6 соединен с входом четвертого УЗ 17, выход которого соединен с вторыми входами сумматора 18 и ДУ 19. Выход сумматора 18 соединен с вторым входом ПФ 14 и входом ФПН 20, выход которого соединен с первым входом ФЧВ 21, второй вход которого соединен с выходом ДУ 19, а выход - с входом ФНЧ 22, выход которого соединен с входом УН 23.
ПДГ работает следующим образом. Блок 11 возбуждения резонатора, электроды 1, 5 обратной связи и возбуждающие электроды 3, 7 образуют схему автогенератора со стабилизацией тока, генерируемого в электродах 1, 5 обратной связи. Функцию стабилизатора тока выполняет АРУ 13. ПФ 14 обеспечивает селекцию требуемой первичной стоячей волны 24 эллиптической моды колебаний (фиг. 2). Если устройство УКВВ не включено и выход сумматора 18 не соединен с вторым входом ПФ 14, то вследствие асимметрии конструкции резонатора 9, направление смещения частиц, которое совпадает с большой осью эллипса 25 первичной волны 24, образует угол ϕ1 с осью симметрии 26 возбуждающих электродов 3, 7. Из фиг.2а видно, что первичная волна как бы "наползает" на оси симметрии 27, 28 компенсационных 2, 8 и информационных 4, 6 электродов. В результате в информационных электродах 4, 6 генерируется значительный нулевой сигнал, пропорциональный углу ϕ1. При включении УКВВ происходит частичная компенсация нулевого сигнала (фиг.2б), при этом происходит поворот волны 24 в направлении уменьшения угла ϕ (ϕ2<ϕ1), и амплитуда нулевого сигнала уменьшается. Тем не менее совпадения осей 25, 26 не происходит вследствие того, что в компенсационных электродах 2, 8, из-за асимметрии конструкции резонатора 9, генерируются сигналы с разной амплитудой и фазой. Если дополнительно подключить выход сумматора 18, который вследствие противофазности сигналов, формируемых на выходах УЗ 16, УЗ 17, выдает разностный сигнал, пропорциональный генерируемому на измерительных электродах 4, 6, ко второму входу ПФ 14, то можно осуществить дополнительный поворот волны 24 (фиг.2в). При этом оси симметрии 25 и 26 практически совпадают, а нулевой сигнал ПДГ принимает минимальное значение.
При повороте ПДГ вокруг своей оси чувствительности (аксиальной оси диска резонатора 9), вследствие сил Кориолиса, вызванных вращением, в резонаторе 9 возникает вторичная стоячая полна 29. В результате наложения первичной 24 и вторичной 29 волн, согласно принципу суперпозиции, образуется результирующая стоячая волна, которая стремится повернуться на угол ϕ относительно первичной волны 24. УКВВ препятствует этому повороту и стремится сохранить положение первичной волны 24. В информационных электродах 4, 6 генерируется сигнал, пропорциональный амплитуде смещения вторичной волны 29, который усиливается УЗ 16, УЗ 17 и ДУ 19. Выходное напряжение ФПН 20 используется в качестве опорного для ФЧВ 21, который производит выпрямление напряжения, поступаемого с выхода ДУ 19. Выходное напряжение ФЧВ 21 фильтруется ФНЧ 22 и усиливается УН 23. Выходное напряжение УН 23 является мерой угловой скорости.
Источники информации
1. Патент США 4655081, МПК G 01 Р 9/04; НКИ 73/505, опубл. 07.04.1987 г.
2. Патент США 5287033, МПК Н 01 L 41/08; НКИ 310/316, опубл. 15.02.1994 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕЗОНАТОР ПЬЕЗОЭЛЕКТРИЧЕСКОГО ГИРОСКОПА | 2001 |
|
RU2214581C2 |
| РЕЗОНАТОР ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА | 2001 |
|
RU2218554C2 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2001 |
|
RU2209394C2 |
| СИСТЕМА СТАБИЛИЗАЦИИ ИЗОБРАЖЕНИЯ НА ПОДВИЖНОМ ОСНОВАНИИ | 2002 |
|
RU2225024C1 |
| СПОСОБ УПРАВЛЕНИЯ ЧУВСТВИТЕЛЬНЫМ ЭЛЕМЕНТОМ И ФОРМИРОВАНИЯ ВЫХОДНОГО СИГНАЛА ВИБРАЦИОННОГО КОРИОЛИСОВА ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2315953C1 |
| БЕСКОНТАКТНЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 2001 |
|
RU2187195C2 |
| ИНТЕГРАЛЬНЫЙ АКСЕЛЕРОМЕТР | 2002 |
|
RU2231796C2 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА | 2002 |
|
RU2222780C1 |
| Система стабилизации изображения на подвижном основании | 2017 |
|
RU2733324C2 |
| МИКРОМЕХАНИЧЕСКИЙ ДАТЧИК УГЛОВОЙ СКОРОСТИ | 2003 |
|
RU2234679C2 |
Изобретение относится к приборостроению и может применяться при построении волновых твердотельных гироскопов. Гироскоп содержит резонатор 9, на котором выполнены сегментные электроды 1-8, разделенные функционально на группы электродов обратной связи, возбуждающих, компенсационных и информационных. Кроме того, гироскоп содержит устройство компенсации вращения волны, состоящее из первого усилителя заряда (УЗ) 10, подключенного к компенсационным электродам 2, 8, блок 11 возбуждения резонатора, соединенный с группами возбуждающих 3, 7 и электродов 1, 5 обратной связи, и блок 16 измерения угловой скорости, соединенный с информационными электродами 4, 6. В гироскопе предусмотрена дополнительная компенсация нулевого сигнала. Техническим результатом является повышение чувствительности и точности гироскопа с одновременным его упрощением. 2 ил.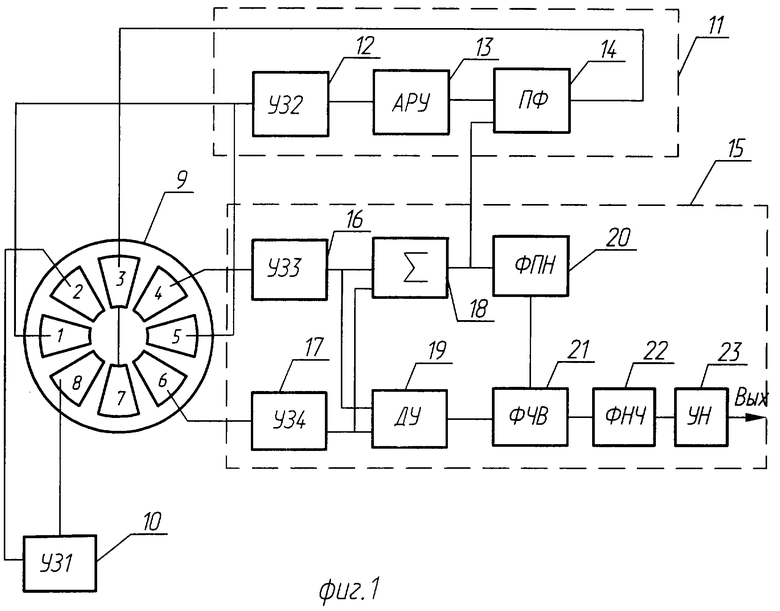
Пьезоэлектрический дисковый гироскоп, содержащий резонатор, на котором выполнено несколько равноудаленных друг от друга и расположенных симметрично оси чувствительности гироскопа электродов, устройство компенсации вращения волны, блок возбуждения резонатора, включающий устройство автоматической регулировки усиления и полосовой фильтр, блок измерения угловой скорости, включающий сумматор, дифференциальный усилитель, формирователь прямоугольного напряжения, фазочувствительный выпрямитель, фильтр низких частот и усилитель напряжения, вход которого соединен с выходом фильтра низких частот, первый и второй входы сумматора соединены соответственно с первым и вторым входами дифференциального усилителя, выход которого соединен со вторым входом фазочувствительного выпрямителя, первый вход которого соединен с выходом формирователя прямоугольного напряжения, вход которого соединен с выходом сумматора, отличающийся тем, что электроды функционально разделены на четыре группы: электроды обратной связи, возбуждающие, компенсационные и информационные, причем оси симметрии возбуждающих электродов и электродов обратной связи ортогональны друг другу, оси симметрии компенсационных и информационных электродов в своих группах ортогональны друг к другу и сдвинуты относительно осей симметрии электродов обратной связи и возбуждающих электродов на угол 45°, устройство компенсации вращения волны содержит первый усилитель заряда, вход которого соединен с первым компенсационным электродом, а выход со вторым компенсационным электродом, блок возбуждения резонатора содержит второй усилитель заряда, вход которого соединен с группой электродов обратной связи, а выход со входом устройства автоматической регулировки усиления, выход которого соединен с первым входом полосового фильтра, второй вход которого соединен с выходом сумматора, а выход с группой электродов возбуждения, блок измерения угловой скорости содержит третий и четвертый усилители заряда, причем первый информационный электрод соединен с входом третьего усилителя заряда, выход которого соединен с первыми входами сумматора и дифференциального усилителя, а второй информационный электрод соединен с входом четвертого усилителя заряда, выход которого соединен со вторыми входами сумматора и дифференциального усилителя, выход фазочувствительного выпрямителя соединен с входом фильтра низких частот.
| US 5287033 A, 15.02.1994 | |||
| US 4655081 A, 07.04.1987 | |||
| Прибор для приведения в движение механизма для отделения или соединения поршня и золотника с кривошипом | 1928 |
|
SU18768A1 |
| СПОСОБ, СИСТЕМА И СЕТЕВОЕ УСТРОЙСТВО, ПРЕДНАЗНАЧЕННЫЕ ДЛЯ МАРШРУТИЗАЦИИ СООБЩЕНИЯ ВРЕМЕННО НЕДОСТУПНОМУ ПОЛЬЗОВАТЕЛЮ СЕТИ | 2004 |
|
RU2310284C2 |

