Изобретение относится к измерительной технике и может применяться в интегральных гироскопах вибрационного типа.
Известен кварцевый гироскоп [1], содержащий чувствительный элемент из четырех упругих стержней квадратного сечения, расположенных симметрично в виде консолей на плате, причем их продольные оси являются параллельными. Все четыре консоли имеют общую заделку в плате, выполненной из того же материала, а сама плата виброизолирована от основания с помощью торсиона. Консоли приводятся в резонансные попарно противофазные изгибные колебания посредством пьезокерамических преобразователей, причем попарно перекрестные свободные концы консолей расходятся или сходятся. При этом в заделке имеет место взаимная компенсация напряжений сжатия от пары консолей, свободные концы которых в данный момент расходятся, напряжениями растяжения от второй пары консолей, свободные концы которых в данный момент, соответственно, сходятся. Внешнее вращение консолей относительно продольной оси приводит к возникновению знакопеременных кориолисовых сил, действующих на свободные концы консолей перпендикулярно к направлению их принудительного перемещения и к направлению вектора внешней угловой скорости. Деформации консолей от действия кориолисовых сил выявляются с помощью пьезодатчиков, закрепленных в основании консолей.
Недостатком устройства является высокая трудоемкость его изготовления.
Известен также чувствительный элемент микроэлектромеханического гироскопа [2] , содержащий четыре подвижные массы, выполненные на пластине кремния. Упругие подвесы подвижных масс расположены крестообразно и закреплены в точке пересечения на струне, вдоль которой действует измеряемая угловая скорость. Принудительные колебания подвижным массам задаются в плоскости пластины, причем направления движений осуществляются в попарно противоположных направлениях. В результате колебаний механические напряжения в точке закрепления всегда равны нулю, что повышает добротность чувствительного элемента. Возникающие знакопеременные кориолисовы силы действуют на подвижные массы в направлении, перпендикулярном плоскости пластины.
Недостатком известного устройства является его низкая точность, обусловленная тем, что возбуждаемые колебания происходят в плоскости чувствительного элемента, а измерительные колебания - перпендикулярно к этой плоскости, следовательно, трудно обеспечить условие резонансной настройки в обеих плоскостях колебаний, т.к. жесткости определяются разными технологическими факторами, а для многих материалов (например, кремний) и различными физическими свойствами.
Задачей, на решение которой направлено изобретение, является повышение точности микромеханического гироскопа.
Эта задача решается за счет того, что в чувствительный элемент микромеханического гироскопа, содержащий основание, рамку, центр, соединенный двумя растяжками с рамкой, четыре подвижные массы и четыре упругих подвеса, каждый из которых соединяет соответствующую подвижную массу с центром, согласно изобретению дополнительно введены две растяжки, соединяющие центр с рамкой, и расположенные перпендикулярно к имеющимся четыре упругих подвеса, каждый из которых соединяет соответствующую подвижную массу с центром, жестко соединенным с основанием, и четыре группы упругих подвесов, каждая из которых состоит из шести упругих подвесов, соединяющих соответствующую массу с рамкой, при этом все упругие элементы имеют Г-образную форму. Согласно изобретению, подвесы в сечении имеют вытянутую форму, при этом своим вытянутым направлением сечение перпендикулярно плоскости подвижной массы. Электрические проводники проходят по одной из сторон подвесов и растяжек.
Основной задачей, решаемой изобретением, является повышение точности измерения. Эта задача решается двояким путем:
- за счет того, что как первичные, так и вторичные колебания происходят только в плоскости чувствительного элемента, для чего и введены дополнительные растяжки и упругие подвесы. Благодаря этому облегчается резонансная настройка обоих типов колебаний. Вытянутая асимметричная форма сечения подвесов способствует разнесению частот возбуждающих и измерительных колебаний, с одной стороны, и паразитных колебаний, с другой стороны, благодаря чему устраняется влияние перекрестных угловых скоростей;
- за счет повышения добротности колебательной системы чувствительного элемента, чему способствует то, что в центральной точке закрепления механические напряжения равны нулю при всех видах колебаний. От резонансных колебаний возбуждения при перемещениях первой и второй масс в одной несущей растяжке имеют место напряжения сжатия и в противоположной растяжке от действия движения третьей и четвертой масс - напряжения растяжения. Это приводит к тому, что в точке крепления и вблизи нее с учетом линейного закона распределения механических напряжений и деформаций напряженное состояние отсутствует. От вторичных колебаний происходят аналогичные действия. Учитывая, что потери энергии данной колебательной системой определяются работой деформационных сил в точке закрепления, которые, как показано выше, равны нулю, т. к. равны нулю деформации и напряжения, то добротность предложенного чувствительного элемента является достаточно высокой.
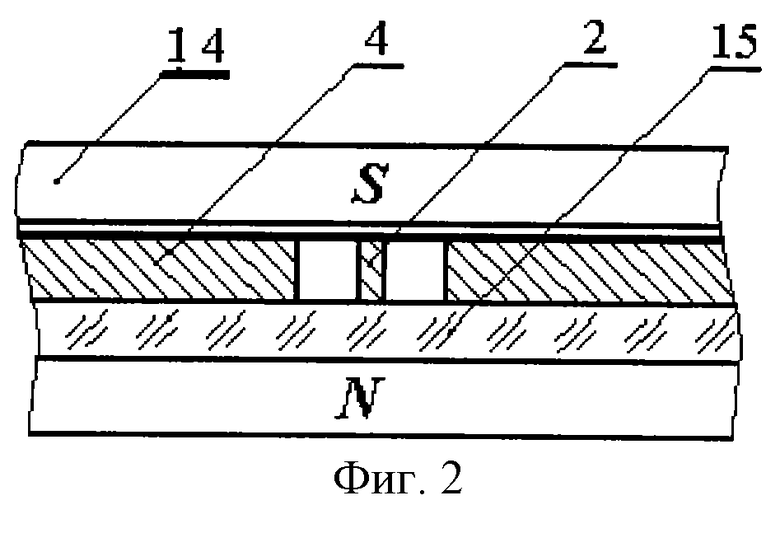
На фиг. 1 и 2 показан предложенный чувствительный элемент микромеханического гироскопа, причем на фиг.1 показан вид на чувствительный элемент сверху, а на фиг.2 - сечение по А-А фиг.1.
Следует учесть, что в приведенной конкретной реализации описан магнитоэлектрический способ возбуждения колебаний и съема информации, хотя данный чувствительный элемент может быть использован и с электростатическим и другими известными способами возбуждения колебаний и съема информации.
Цифровые позиции на чертежах имеют следующие обозначения:
1 - внешняя жесткая рамка,
2 - Г-образный упругий подвес (всего тридцать два подвеса),
3 - проводник магнитоэлектрического преобразователя силы,
4, 11, 12 и 6 - первая, вторая, третья и четвертая подвижные массы соответственно,
5 - проводник положительной обратной связи магнитоэлектрического генератора возбуждения колебаний подвижной массы,
7 - проводник индукционного преобразователя перемещений (на чертеже показан пунктиром),
8 - несущая жесткая растяжка (всего четыре растяжки),
9 - жесткий центр,
10 - контактная площадка (всего 12 контактных площадок),
13 - проводник магнитоэлектрического преобразователя отрицательной обратной связи по информационному каналу (на чертеже показан пунктиром),
14 - полюс магнита,
15 - основание (стекло).
Все четыре подвижные массы 4, 6, 11 и 12 являются одинаковыми, и каждая состоит из пяти квадратных пластин, как показано на фиг.1. Подвижные массы выполнены за одно целое с внешней рамкой 1, жестким центром 8 и упругими подвесами 2 из пластины кремния, ориентированной в кристаллографической плоскости 100 (возможно также применение плоскости 110). Все 32 упругих подвеса являются одинаковыми, имеют большую жесткость в направлении, перпендикулярном плоскости чувствительного элемента (ось z), и малую жесткость в направлении осей х и у. В связи с этим подвижные массы 4, 6, 11 и 12 имеют возможность перемещаться только в плоскости пластины. Своей средней частью жесткий центр 8 крепит весь чувствительный элемент к неподвижному основанию 15 прибора.
На одной из сторон упругих подвесов 2 выполнены проводники 5 положительной обратной связи и проводники 3 преобразователя силы, а на противоположные стороны других упругих подвесов 2 нанесены аналогичные проводники 7 съема информации и проводники 13 отрицательной обратной связи, расположенные под прямым углом к проводникам 3 и 5 первой стороны подвесов 2. Чувствительный элемент в сборе размещается в магнитной системе параллельно полюсам 14 постоянного магнита (см. фиг.2).
Чувствительный элемент микромеханического гироскопа работает следующим образом. Пусть на проводник 3 магнитоэлектрического преобразователя силы подан положительный импульс с генератора возбуждения. Силовые проводники 3, находящиеся в однородном магнитном поле, расположены на подвижных массах 4, 6, 11 и 12 так (см. фиг.1), что первая масса 4 перемещается в отрицательном направлении оси х, вторая масса 11 и четвертая 6 - положительном и третья 12 - отрицательном направлении. При смене знака импульса в проводниках 3 направление движения подвижных масс 4, 6, 11 и 12 меняется на противоположное, таким образом подвижные массы 4, 6, 11 и 12 приводятся в принудительные колебания на резонансной частоте. Все четыре подвижные массы 4, 6, 11 и 12 и их упругие подвесы 2 выполнены одинаковыми, поэтому амплитуды колебаний каждой отдельной массы равны между собой. Теоретически амплитуда колебаний отдельной подвижной массы, при возбуждении на резонансной частоте магнитоэлектрическим преобразователем, определяется по следующей зависимости:
где В - магнитная индукция в магнитном зазоре; I - ток в силовом проводнике 3; a0 - длина проекции силового проводника 3 на ось у; ап, bп, cп - соответственно длина, ширина и толщина спрямленного Г-упругого подвеса 2; Е[100] - модуль упругости кремния в плоскости (100); Q - добротность колебательной системы, содержащей подвижные массы 4, 6, 11, 12 и упругие элементы 2. При движении подвижной массы 4 в проводнике 5 наводится э.д.с., которая по цепи положительной обратной связи подается на управление резонансным генератором. На остальных подвижных массах 6, 11 и 12 проводники 5 обратной связи выполнены аналогично и включены между собой последовательно.
При вращении чувствительного элемента относительно оси z на каждую подвижную массу 4, 6, 11 и 12 начинает действовать кориолисово ускорение, направление которого зависит от направления линейной скорости (см. фиг.1), а величина определяется следующей зависимостью:
aк = 2vΩ. (2)
Соответственно кориолисова сила равна
Fк = 2mvΩ. (3)
Знакопеременная кориолисова сила перемещает каждую подвижную массу 4, 6, 11 и 12 в направлении, перпендикулярном действующей в данный момент линейной скорости возбуждения и действующей внешней угловой скорости, при этом в проводнике 7 индукционного преобразователя перемещений наводится э.д.с., пропорциональная внешней угловой скорости. Ее полная величина равна
ΔU = ωpΔxBR, (4)
где ωp - резонансная частота колебаний подвижной массы 4, 6, 11 и 12; R - величина сопротивления проводника 7 индукционного преобразователя.
Далее напряжение с датчика перемещений усиливается в электронном блоке обработки (не показан) и подается с обратным знаком на проводник 13 магнитоэлектрического преобразователя отрицательной обратной связи по информационному каналу.
Источники информации
1. P. Leger Quapason - a new low-cost vibrating gyroscope. 3-rd Saint Petersburg International Conference on Integrated Navigation Systems. SPb: CSRI "Electropribor", 1996. Part 1, p.143-149.
2. Патент США 5952572, выдан 14.09.1999 г. МПК G 01 P 9/00, НКИ 73/504.04 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА | 2005 |
|
RU2301969C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА | 2009 |
|
RU2423668C1 |
| КАМЕРТОННЫЙ МИКРОГИРОСКОП | 2014 |
|
RU2580871C1 |
| Чувствительный элемент микромеханического гироскопа | 2022 |
|
RU2807466C1 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП | 2010 |
|
RU2485444C2 |
| ИНТЕГРАЛЬНЫЙ ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ВИБРАЦИОННОГО ГИРОСКОПА | 2011 |
|
RU2453812C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2379630C1 |
| МИКРОМЕХАНИЧЕСКИЙ ДАТЧИК УГЛОВОЙ СКОРОСТИ | 2003 |
|
RU2234679C2 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2001 |
|
RU2209394C2 |
| Способ управления четырехмассовым резонатором в микромеханическом гироскопе | 2023 |
|
RU2825192C1 |
Изобретение относится к измерительной технике и может применяться в интегральных гироскопах вибрационного типа. Технический результат - повышение точности гироскопа. Чувствительный элемент содержит жесткую внешнюю рамку (1) и центр (9), который соединен с рамкой (1) четырьмя несущими жесткими растяжками (8), расположенными крестообразно. Между рамкой (1) и центром (9) на тридцати двух упругих Г-образных подвесах (2) подвешены четыре подвижные массы (4, 11, 12 и 6). Центр (9) соединен с неподвижным основанием. Упругие подвесы (2) имеют в сечении вытянутую форму и своим вытянутым направлением перпендикулярны плоскости подвижных масс (4, 11, 12 и 6). По одной из сторон каждого из подвесов (2) и растяжек (8) проходят проводники (3, 5, 7 и 13). Подвижные массы (4, 11, 12 и 6) могут колебаться только в одной плоскости, что исключает влияние перекрестных угловых скоростей. 1 з.п.ф-лы, 2 ил.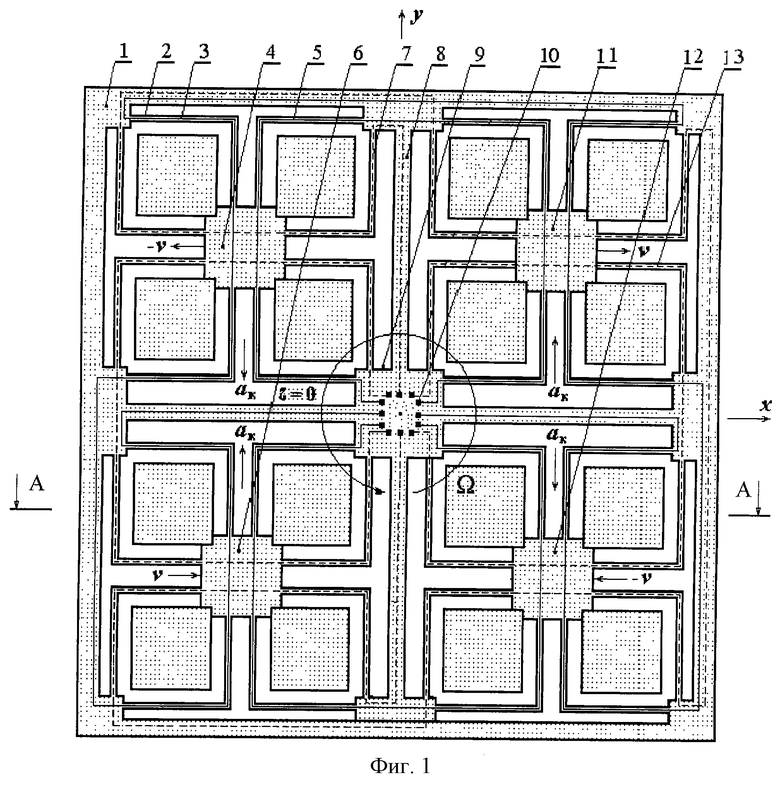
| US 5952572 A, 14.09.1999 | |||
| US 5899090 A, 13.04.1999 | |||
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 1993 |
|
RU2064682C1 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП (ЕГО ВАРИАНТЫ) | 1995 |
|
RU2085848C1 |
| US 6308567 B1, 30.10.2001. | |||

