Изобретения относятся к измерительной технике и могут применяться в вибрационных кориолисовых гироскопических датчиках угловой скорости.
Известен способ управления чувствительным элементом и формирования выходного сигнала осцилляторного кориолисова гироскопического датчика угловой скорости [1], заключающийся в возбуждении автоколебаний первой моды со стабилизацией амплитуды скорости колебаний, причем фаза возбуждающей силы соответствует фазе скорости колебаний в первой моде, а выходной сигнал формируют так, чтобы он был пропорционален амплитуде скорости колебаний второй (ортогональной) моды. Колебания второй (ортогональной) моды возникают под действием кориолисовой силы, поэтому их амплитуда пропорциональна измеряемой угловой скорости.
Недостатком этого способа является то, что гироскопические датчики угловой скорости, построенные таким образом, имеют низкую точность. Погрешности таких датчиков имеют следующие основные составляющие:
- высокая температурная зависимость крутизны, вызванная температурной зависимостью добротности, которая в этих датчиках определяет крутизну;
- высокая температурная зависимость смещения нуля, т.к. для обеспечения требуемого диапазона измерения нужна низкая добротность, т.е. высокий уровень связей с основанием, через которые на чувствительный элемент действуют возмущающие факторы.
Устройство, реализующее данный способ [2], содержит: чувствительный элемент, выполненный из кремния, представляющий собой плоский камертон, схему возбуждения, схему детектирования. Схема возбуждения приводит в противофазные движения массы камертона. При действии угловой скорости массы под воздействием силы Кориолиса движутся перпендикулярно основному движению. Сигнал по угловой скорости измеряется детектором по чувствительной оси.
Недостатками данного устройства является высокая температурная погрешность, определяемая зависимостью добротности данного устройства от изменения температуры, и высокая зависимость от возмущающих факторов, т.к. в данной схеме измерения все ошибки преобразователей, входящих в прибор, присутствуют в выходном сигнале. Разночастотность контуров в значительной степени снижает точность прибора в целом.
Известен также способ управления чувствительным элементом и формирования выходного сигнала волнового кориолисова гироскопического датчика угловой скорости [3], заключающийся в возбуждении автоколебаний первой моды со стабилизацией амплитуды скорости колебаний, причем фаза возбуждающей силы соответствует фазе скорости колебаний в первой моде, колебания второй (ортогональной) моды подавляются, а выходной сигнал формируют так, чтобы он был пропорционален амплитуде силы, прикладываемой для подавления колебаний второй (ортогональной) моды. Эта сила равна по величине кориолисовой силе, поэтому пропорциональна измеряемой угловой скорости.
Недостаток данного способа заключается в том, что гироскопические датчики угловой скорости, в которых он реализован, имеют низкую точность. Погрешности таких датчиков имеют следующие основные составляющие:
- квадратичная нелинейность преобразования;
- температурная зависимость смещения нуля, вызванная температурной зависимостью погрешностей, возникающих при усилении и фазочувствительном детектировании сигнала, пропорционального скорости колебаний второй (ортогональной) моды, т.к. эта скорость имеет очень низкий уровень из-за подавления колебаний.
Устройство для реализации известного способа [3] содержит источник опорного сигнала и схему возбуждения автоколебаний, имеющую вход информационного сигнала, выход управляющего сигнала и вход опорного сигнала, соединенный с выходом источника опорного сигнала. Устройство содержит также цепь подавления вторичной моды колебаний, имеющую вход информационного сигнала и состоящую из последовательно соединенных фазочувствительного детектора, усилителя, модулятора и усилителя мощности, который имеет выход управляющего сигнала.
Недостатком данного устройства, также как и способа, который он реализует, является низкая точность.
Задачей, на решение которой направлены настоящие изобретения, является повышение точности.
Эта задача решается за счет того, что в способе управления чувствительным элементом и формирования выходного сигнала вибрационного кориолисова гироскопического датчика угловой скорости, заключающемся в возбуждении автоколебаний первой моды со стабилизацией амплитуды скорости колебаний, согласно изобретению одновременно возбуждают автоколебания второй (ортогональной) моды со стабилизацией амплитуды скорости, причем фаза возбуждающих сил при линейных колебаниях или моментов при угловых колебаниях соответствует фазе сигнала, пропорционального сумме скоростей колебаний в первой моде и во второй (ортогональной) моде, а выходной сигнал формируют так, чтобы он был пропорционален разности амплитуд возбуждающих сил или моментов.
В устройство, реализующее данный способ, которое содержит источник опорного сигнала и схему возбуждения автоколебаний, имеющую вход информационного сигнала, выход управляющего сигнала и вход опорного сигнала, соединенный с выходом источника опорного сигнала, согласно изобретению дополнительно введены сумматор, вторая схема возбуждения автоколебаний, своим входом опорного сигнала соединенная с выходом источника опорного сигнала, и выходной дифференциальный усилитель, выход которого является выходом устройства, инверсный вход подключен к выходу сигнала управления амплитудой одной схемы возбуждения автоколебаний, а прямой вход - к выходу сигнала управления амплитудой другой схемы возбуждения автоколебаний, входы информационного сигнала которых соединены с входами сумматора, выход которого соединен с входами фазового сигнала схем возбуждения автоколебаний.
Кроме того, устройство, согласно изобретению, отличается тем, что схема возбуждения автоколебаний содержит усилитель, демодулятор, дифференциальный усилитель и параметрический преобразователь, при этом вход усилителя является входом информационного сигнала, а выход соединен с входом демодулятора и является выходом сигнала скорости, выход демодулятора соединен с инверсным входом дифференциального усилителя, прямой вход которого является входом опорного сигнала, а выход - выходом сигнала управления амплитудой и соединен с первым входом параметрического преобразователя, второй вход которого является входом фазового сигнала, а выход - выходом управляющего сигнала.
Отличительным признаком заявленного способа является то, что возбуждают автоколебания второй (ортогональной) моды со стабилизацией амплитуды скорости, причем фаза возбуждающих сил при линейных колебаниях или моментов при угловых колебаниях соответствует фазе сигнала, пропорционального сумме скоростей колебаний в первой моде и во второй (ортогональной) моде.
Другим отличительным признаком является то, что выходной сигнал формируют так, чтобы он был пропорционален разности амплитуд возбуждающих сил или моментов. Таким образом, одновременное возбуждение автоколебаний двух взаимоортогональных мод со стабилизацией амплитуд скоростей исключает квадратичную нелинейность преобразования и существенно уменьшает температурную зависимость смещения нуля за счет того, что уровень сигнала остается неизменным в отличие от прототипа. Кроме того, формирование сигнала, пропорционально разности амплитуд, исключает синфазные помехи, воздействующие на каждый из каналов.
Таким образом, предложенный способ обеспечивает повышение точности.
Отличительным признаком устройства для реализации данного способа является то, что в нем содержится дополнительная схема возбуждения автоколебаний, сумматор, выходной дифференциальный усилитель, которые служат для возбуждения второй (ортогональной) моды.
Предложенный способ для линейных колебаний реализуется следующим образом.
На фиг.1 схематично показана реализация способа. К некоторой массе М одновременно в направлении осей Х и Y прикладываются знакопеременные силы с амплитудами f1 (сила возбуждение первой рабочей моды) и f2 (сила возбуждения второй рабочей моды). По правилу сложения векторов результирующая знакопеременная сила направлена по диагонали. При действии угловой скорости Ω на колеблющуюся со знакопеременной скоростью Vp массу М возникающая сила Кориолиса Fk стремится изменить направление Vp:
FK=K· Ω·Vp
Здесь:
K - постоянный коэффициент, включающий массу М;
Ω - угловая скорость;
Vp - скорость колеблющейся массы М, которая поддерживается постоянной.
Известным способом сигнал от действия угловой скорости Ω измеряется, причем величина сигнала пропорциональна скоростям V1, V2, и после обработки поступает на схему возбуждения. В схемах возбуждения поддерживаются на одинаковом уровне амплитуды скоростей V1, V2 первой и второй мод колеблющейся массы М, что приводит к поддержанию вектора Vp по направлению. Разница сигналов угловой скорости Ω усиливается до напряжения Uвых полезного сигнала, пропорционального силе Кориолиса Fk.
Для крутильных колебаний способ реализуется аналогичным образом.
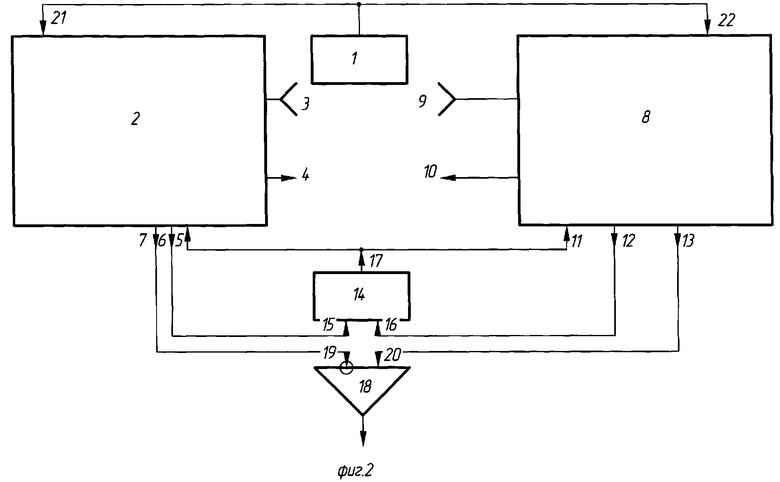
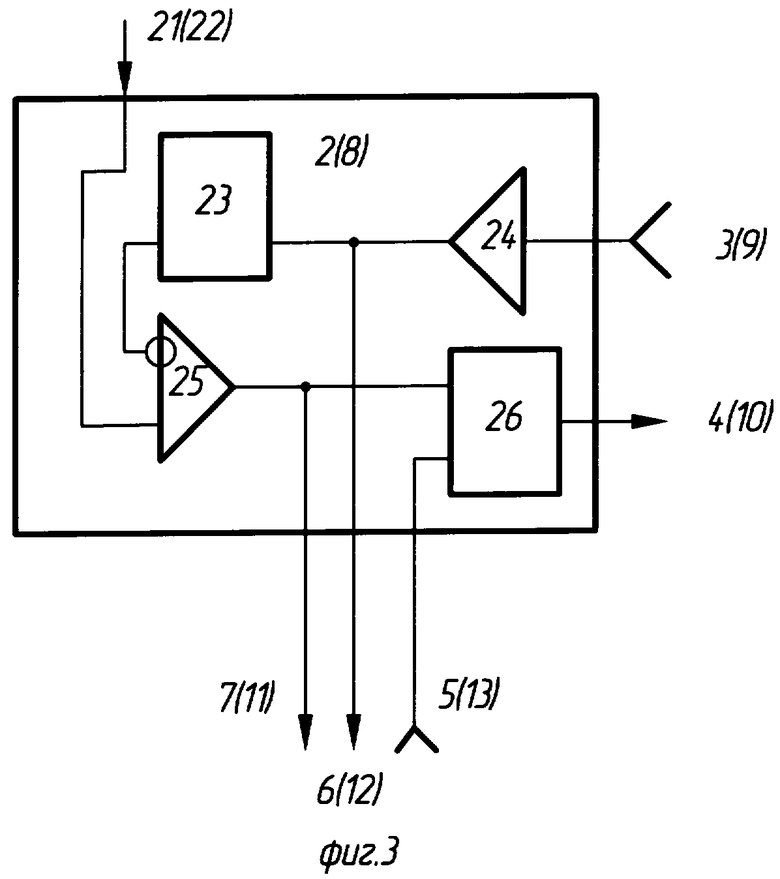
На фиг.2 изображено устройство, реализующее данный способ, а на фиг.3 изображена реализация схемы возбуждения автоколебаний. Устройство управления чувствительным элементом и формирования выходного сигнала вибрационного кориолисова гироскопического датчика угловой скорости содержит источник 1 опорного сигнала и первую схему 2 возбуждения автоколебаний, имеющую вход 3 информационного сигнала, выход 4 управляющего сигнала и вход 21 опорного сигнала, соединенный с выходом источника 1 опорного сигнала. Для реализации предложенного способа в известное устройство введены сумматор 14, вторая схема 8 возбуждения автоколебаний, имеющая вход 9 информационного сигнала и выход 10 управляющего сигнала, а также вход 22 опорного сигнала, выходной дифференциальный усилитель 18. Вторая схема 8 возбуждения автоколебаний своим входом 22 опорного сигнала соединена с выходом источника 1 опорного сигнала. Кроме того, обе схемы 2, 8 возбуждения автоколебаний дополнительно снабжены входами 5, 11 фазового сигнала, выходами 6, 12 сигнала скорости и выходами 7, 13 сигнала управления амплитудой. При этом выходы 6, 12 сигнала скорости соединены со входами 15, 16 сумматора 14, выход 17 которого соединен со входами 5, 11 фазового сигнала обеих схем 2, 8 возбуждения. Выход 13 сигнала управления амплитудой второй схемы 8 возбуждения автоколебаний, соединенный с прямым входом 20 дифференциального усилителя 18, и аналогичный выход 7 сигнала управления первой схемы 2 возбуждения, соединенный с инверсным входом 19 дифференциального усилителя 18, формируют выходной сигнал устройства.
Схемы 2 (8) возбуждения автоколебаний (фиг.2) содержат усилитель 24, демодулятор 23, дифференциальный усилитель 25 и параметрический преобразователь 26. При этом вход 3 (9) усилителя 24 является входом информационного сигнала. Выход 6 (12) усилителя 24 соединен со входом демодулятора 23. Одновременно с выхода 6 (12) усилителя 24 снимается сигнал скорости. Выход демодулятора 23 соединен с инверсным входом дифференциального усилителя 25, на прямой вход 21 (22) которого поступает сигнал с источника 1 опорного напряжения. На выходе 7 (11) дифференциального усилителя 25 присутствует выходной сигнал управления амплитудой. Выход дифференциального усилителя 25 соединен с первым входом параметрического преобразователя 26, на другой вход 5 (13) которого поступает фазовый сигнал. Выход 4 (10) параметрического преобразователя 26 является выходом управляющего сигнала.
Устройство работает следующим образом. Одновременно возбуждают автоколебания первой и второй ортогональной моды. При действии угловой скорости на входы 3 и 9 обеих схем 2, 8 возбуждения поступает сигнал. Входы 3 и 9 являются входами усилителей 24 схем 2, 8 возбуждения. С усилителей 24 сформированные сигналы поступают на сумматор 14 и одновременно на демодуляторы 23, сигналы усиливаются и подаются на дифференциальные усилители 25 совместно с сигналом источника 1 опорного напряжения. Далее сигнал поступает на первые входы 5, 13 параметрических преобразователей 26, на вторые входы которых поступает фазовый сигнал с сумматора 14 для формирования управляющего сигнала. Тем самым в схемах 2, 8 возбуждения поддерживаются на одинаковом уровне амплитуды колеблющейся массы, что приводит к поддержанию вектора скорости Vp как по величине, так и по направлению. Сформированный сигнал с дифференциальных усилителей 25 обеих схем 2, 8 возбуждения автоколебаний поступает на прямой и инверсный входы выходного дифференциального усилителя 18 для формирования выходного сигнала.
Источники информации
1. Barbour N. et al. Micro-Electromechanical Instrument and Systems Development at Draper Laboratory // 3rd Saint Petersburg International Conference of Integrated Navigation Systems. - SPb.: CSRI "Elektropribor", 1996. - Part 1. - P.3-10.
2. Weinberg M. et al. A Micromachined Comb Drive Tuning Fork Gyroscope for Commercial Applications. - The 2nd Saint Petersburg International Conference on Gyroscopic Technology and Navigation. - CSRI "Elektropribor", 1995. - Part 2. - P.79.
3. Hopkin I. Performance and Design of Silicon Micromachined Gyro // Symposium Gyro Technology, Germany. - 1997. - P.1.0-1.10. (прототип).
Изобретения относятся к измерительной технике и могут применяться в вибрационных кориолисовых гироскопических датчиках угловой скорости. Способ заключается в одновременном возбуждении автоколебаний первой и второй (ортогональной) моды со стабилизацией амплитуды скорости колебаний, при этом фаза возбуждающих сил при линейных колебаниях или моментов при угловых колебаниях соответствует фазе сигнала, пропорционального сумме скоростей колебаний в первой моде и во второй (ортогональной) моде, а выходной сигнал формируют так, чтобы он был пропорционален разности амплитуд возбуждающих сил или моментов. Устройство для осуществления способа содержит источник опорного сигнала, две схемы возбуждения автоколебаний, сумматор, объединяющий выходы обеих схем возбуждения автоколебаний и дифференциальный усилитель, являющийся выходом устройства. Техническим результатом является повышение точности. 2 с. и 1 з.п. ф-лы, 3 ил.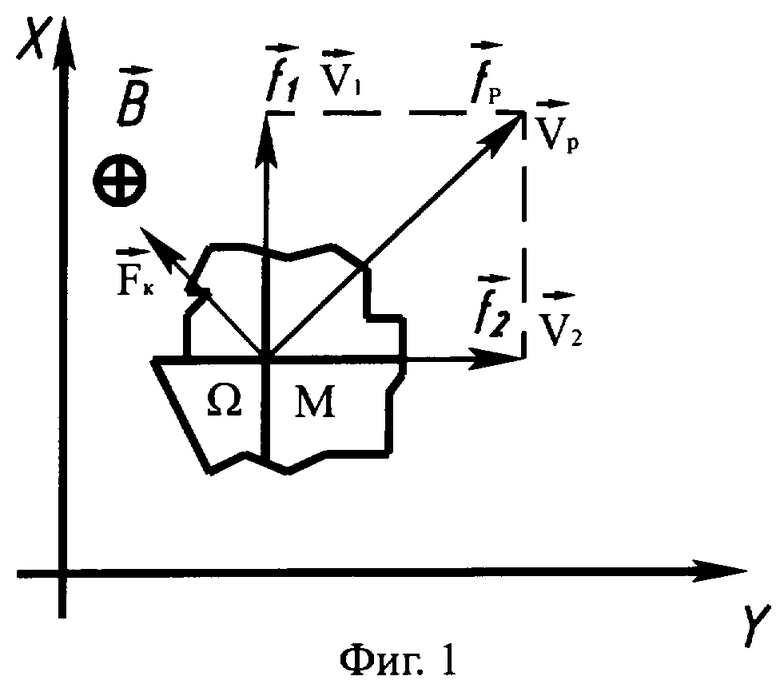
| HOPKIN I | |||
| Performance and Design of Silicon Micromachined Gyro | |||
| Symposium Gyro Technology, Germany, 1997, p.1.0-1.10 | |||
| BARBOUR N | |||
| et al | |||
| Micro-Electromechanical and Systems Development at Draper Laboratory | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| CSRI "Electropribor", 1996, Part 1, p.3-10. | |||

