Изобретение относится к области оптического приборостроения и может быть использовано в гиростабилизированных устройствах, размещаемых на подвижных объектах, для повышения точности стабилизации при больших углах наведения и надежности функционирования при эксплуатации.
Известна система [1] стабилизации изображения на подвижном основании, содержащая индикаторную гироскопическую платформу с установленным на ней зеркалом, карданов подвес в виде наружной и внутренней рам, трехстепенной гироскопический датчик угла (ГДУ) с датчиками момента (ДМ) и датчиками угла поворота ротора (ДУПР) ГДУ, выходы которых через усилительно -корректирующие устройства (УКУ) соответствующих каналов стабилизации соединены с входами датчиков стабилизации (ДС) рам подвеса, два канала управления скоростью разворота платформы (КУСРП) с усилительным звеном (УЗ) в каждом канале, подключенным к входу соответствующего ДМ ГДУ, два пороговых устройства для защиты ротора (ПУЗР) ГДУ от удара об механические упоры, своими входами подключенные к ДУПР ГДУ, а выходами через первый и второй сумматоры подключенные к первым входам УЗ КУСРП, и два устройства защиты от перегрева (УЗП) ДС, каждое из которых состоит из интегратора (И), порогового устройства (ПУ), электронного ключа (ЭК) и двухполярного ограничителя напряжения, соединенные с УКУ каждого канала стабилизации; ГДУ установлен на вспомогательной оси, которая через ленточную передачу 1:2 связана с зеркалом; в систему также входят: устройство компенсации ошибки ленточной передачи (УКОЛП), два устройства защиты от перегрева (УЗП) ДМ ГДУ, два устройства компенсации дрейфа линии визирования (УКДЛВ) и датчики угла вертикального ДУ ВН и горизонтального наведения ДУ ГН, соединенные со входами УКДЛВ, причем датчик угла вертикального наведения соединен также со входом УКОЛП, выход которого соединен через третий сумматор со входом УКУ по каналу вертикального наведения, выходы УКДЛВ соединены через первый и второй сумматоры с первыми входами УЗ КУСРП, входы УЗП ДМ ГДУ соединены с выходами УЗ КУСРП, а их выходы со вторыми входами УЗ КУСРП.
Недостатком системы [1] стабилизации является низкая точность, обусловленная зависимостью коэффициента передачи канала стабилизации по оси горизонтального наведения от угла платформы по оси вертикального наведения, так как при отклонении платформы от нулевого положения по вертикали ГДУ измеряет проекцию угла отклонения по горизонту относительно пространства, что в результате приводит к увеличению ошибки стабилизации.
Еще одним недостатком системы стабилизации является низкая надежность, обусловленная тем, что в случае механического заклинивания рам подвеса, устройства защиты от перегрева датчиков стабилизации (УЗП ДС) уменьшают напряжения на выходах усилительно-корректирующих устройств (УКУ) и на датчиках стабилизации (ДС), что приводит к нарушению работоспособности системы стабилизации при дальнейшем снижении момента трения.
Целью изобретения является устранение зависимости (падения коэффициента передачи) по оси горизонтального наведения от угла наведения по вертикали, а также реализация схемы защиты от перегрева, обеспечивающей устойчивое восстановление работоспособности системы после устранения механического заклинивания.
Технический результат заключается в повышении точности и надежности системы стабилизации.
Задачами, на решение которых направлено изобретение, являются снижение ошибки стабилизации (устранение зависимости коэффициента передачи по оси горизонтального наведения от угла наведения по вертикали), а также обеспечение защиты системы стабилизации при возникновении аварийного режима (механическом заклинивании) и восстановление работоспособности после его устранения.
Поставленные задачи решаются за счет того, что система стабилизации изображения на подвижном основании, содержащая индикаторную гироскопическую платформу с установленным на ней зеркалом, карданов подвес, выполненный в виде наружной и внутренней рам, трехстепенной гироскопический датчик угла (ГДУ) с датчиками момента (ДМ) и датчиками угла поворота ротора (ДУПР) ГДУ, выходы которых через усилительно-корректирующие устройства (УКУ) соответствующих каналов стабилизации соединены с входами датчиков стабилизации (ДС) рам подвеса, два канала управления скоростью разворота платформы (КУСРП) с усилительным звеном (УЗ) в каждом канале, подключенным к входу соответствующего (ДМ ГДУ), два пороговых устройства для защиты ротора (ПУЗР) ГДУ от удара о механические упоры, своими входами подключенные к ДУПР ГДУ, а выходами через первый и второй сумматоры подключенные к первым входам УЗ КУСРП, и два устройства защиты от перегрева (УЗП) ДС, каждое из которых состоит из интегратора (И), порогового устройства (ПУ), электронного ключа (ЭК) и двухполярного ограничителя напряжения, соединенные с УКУ каждого канала стабилизации, при этом ГДУ установлен на вспомогательной оси, которая через ленточную передачу с коэффициентом передачи 1:2 связана с зеркалом, устройство компенсации ошибки ленточной передачи (УКОЛП), два устройства защиты от перегрева (УЗП) ДМ ГДУ, два устройства компенсации дрейфа линии визирования (УКДЛВ), датчик угла вертикального наведения (ДУ ВН) и датчик угла горизонтального наведения (ДУ ГН), соединенные с входами УКДЛВ, причем ДУ ВН соединен также с входом УКОЛП, выход которого соединен через третий сумматор с входом УКУ по каналу вертикального наведения, выходы УКДЛВ соединены через первый и второй сумматоры с первыми входами УЗ КУСРП, входы УЗП ДМ ГДУ соединены с выходами УЗ КУСРП, а их выходы со вторыми входами УЗ КУСРП, согласно изобретению, содержит устройство коррекции коэффициента передачи (УККП), состоящее из генератора прямоугольных импульсов, сумматора, интегратора, компаратора, вход которого соединен с ДУ ВН, и операционного усилителя с импульсной обратной связью, выход которого соединен с входом УКУ, а вход с ДУПР ГДУ, при этом каждое из (УЗП) ДС, состоящее из сумматора, интегрирующего усилителя, компаратора, термокомпенсирующего источника опорного напряжения, соединено с УКУ двух каналов стабилизации.
Одним отличительным признаком заявленного изобретения является введение в систему стабилизации изображения на подвижном основании устройства коррекции коэффициента передачи, позволяющего снизить ошибку стабилизации за счет устранения зависимости коэффициента передачи по оси горизонтального наведения от угла наведения по вертикали.
Еще одним отличительным признаком заявленного изобретения является то, что каждое из двух (УЗП) ДС, состоящее из сумматора, интегрирующего усилителя, компаратора, термокомпенсирующего источника опорного напряжения, соединено с УКУ двух каналов стабилизации, позволяет обеспечить защиту системы стабилизации при возникновении аварийного режима (механическом заклинивании) и восстановление работоспособности после его устранения за счет того, что при устранении механического заклинивания (снижении момента трения) УКУ формирует максимальное выходное напряжение на ДС.
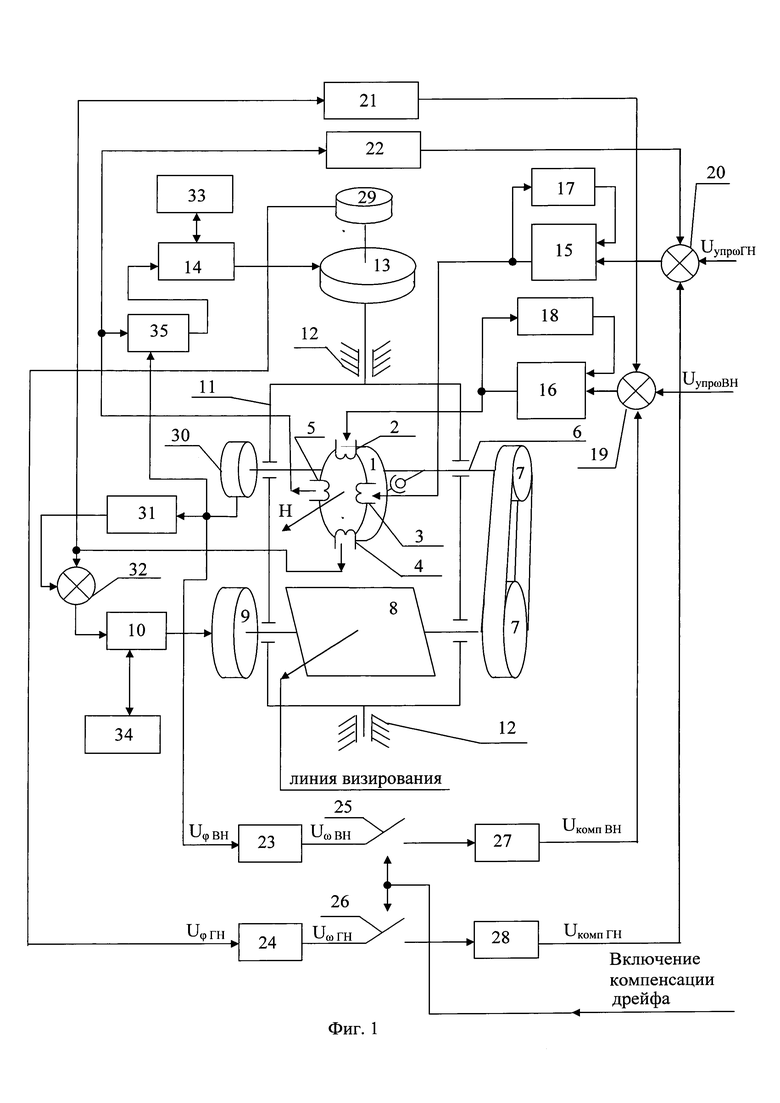
На фиг. 1 изображена структурная схема системы стабилизации изображения на подвижном основании.
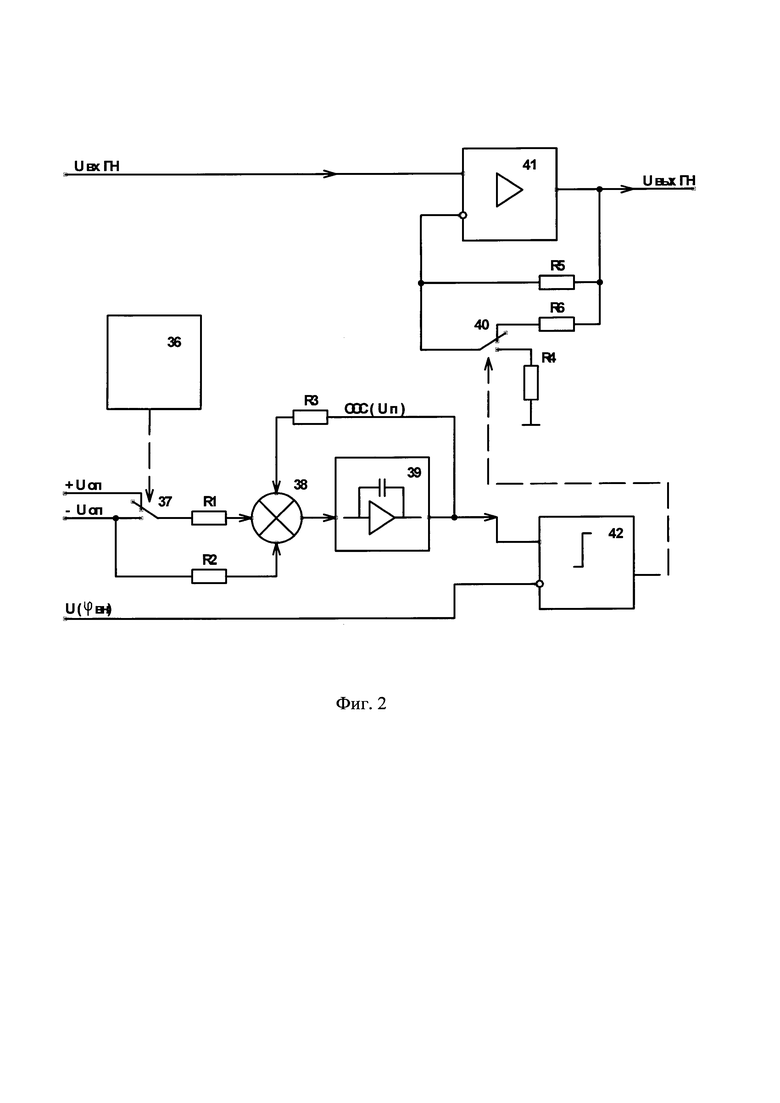
На фиг. 2 изображена структурная схема УККП.
На фиг. 3 изображены эпюры сигналов УККП.
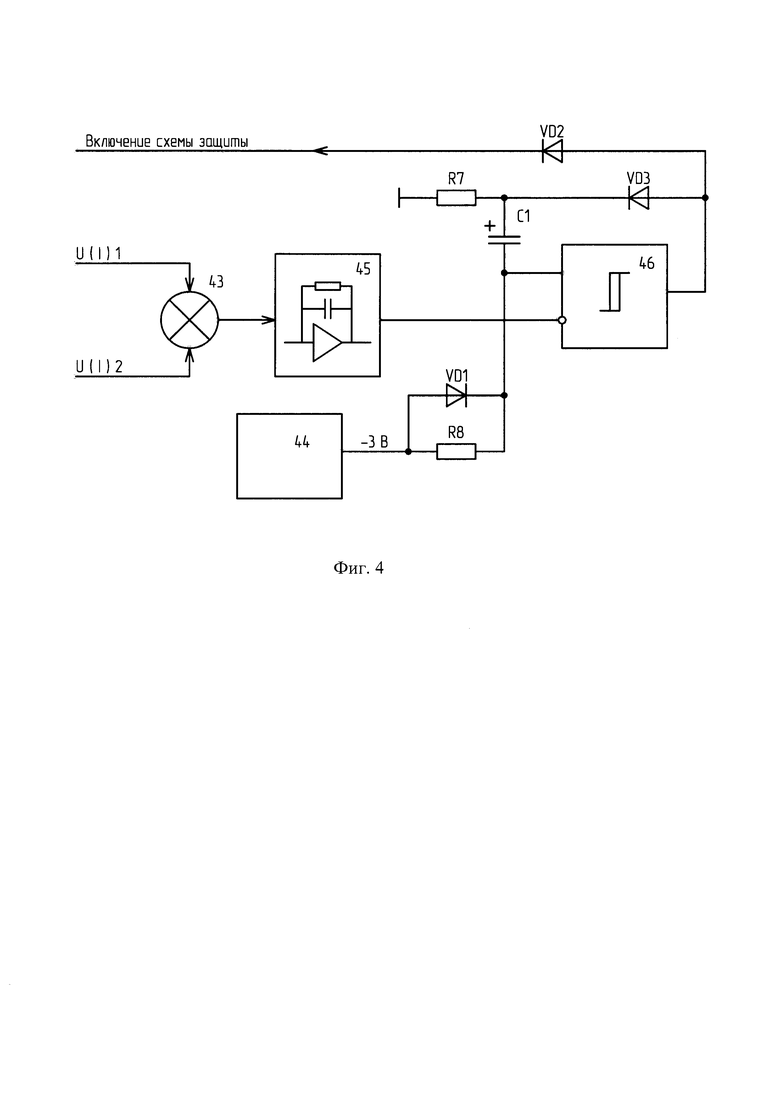
На фиг. 4 изображена структурная схема (УЗП) ДС.
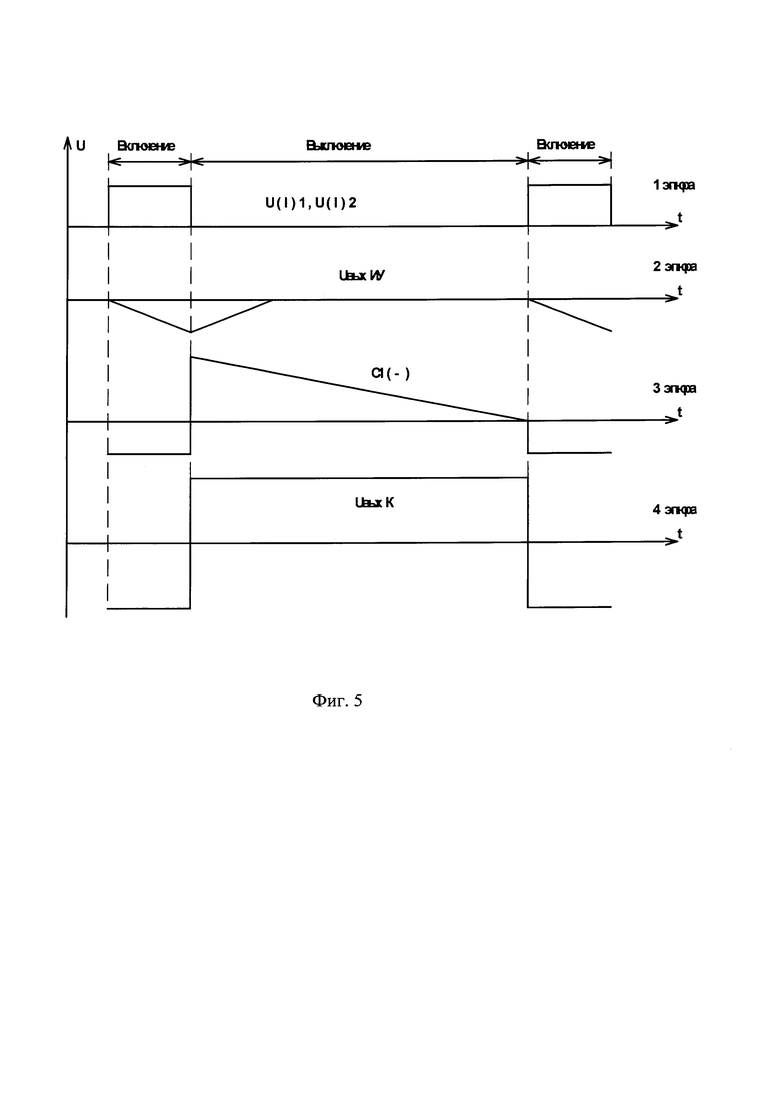
На фиг. 5 изображены эпюры сигналов (УЗП) ДС.
Пример реализации системы стабилизации изображения на подвижном основании.
Предложенная схема (фиг. 1) содержит индикаторную гироскопическую платформу, в которую входит ГДУ, состоящий из гиромотора 1, ДМ 2, 3 и ДУ ПР 4, 5. Платформа содержит вспомогательную ось 6, на которой установлен ГДУ, ленточную передачу 7, которая механически связывает ось 6 ГДУ со стабилизируемым зеркалом 8. Изображение от зеркала 8 попадает на датчик изображения (условно не показан). Зеркало 8 также механически связано с ДС 9, который вместе с УКУ 10 и ДУ 4 образует систему стабилизации зеркала 8 по оси вертикального наведения. Ось 6 ГДУ и зеркало 8 установлены в подшипниках наружной рамы 11 карданова подвеса, а внутренней рамой служит само зеркало 8. Рама 11 установлена в подшипниках 12 подвижного основания ССИПО. Рама 11 механически связана с ДС 13, который вместе с УКУ 14 и ДУ 5 образуют систему стабилизации зеркала 8 по оси горизонтального наведения. Помимо этого платформа содержит два УЗ 15, 16, которые соединены соответственно с ДМ 3 и 2. К УЗ 15 и 16 подключены УЗП ДМ 17 и 18. На входе УЗ 15, 16 включены первый и второй сумматоры 19, 20 соответственно, на которые поступают сигналы с ПУЗР 21, 22, включенные между выходами ДУ 4 и 5 соответственно и сумматорами 19, 20. На сумматоры 19, 20 также поступают напряжения от УКДЛВ, состоящих из дифференциаторов 23, 24, ключей 25, 26 и интеграторов 27, 28, включенных последовательно. На дифференциаторы 23, 24 поступают напряжения с выходов ДУ ГН 29 и ДУ ВН 30. Сигнал с выхода ДУ ВН 30 также подается на вход УКОЛП 31, напряжение с выхода которого через третий сумматор 32 подается на вход УКУ 10. К УКУ 10 и 14 подключены УЗП ДС 33 и 34. Для защиты гиромотора 1 от удара об механические упоры введена связь между ДУПР 5, 4 и сумматорами 19, 20 на входах УЗ 16, 15 и ДМ 2, 3 через ПУЗР 21, 22.
Также система стабилизации изображения на подвижном основании содержит устройство (35) коррекции коэффициента передачи (УККП), выход которого соединен с входом усилительно-корректирующего устройства 14 (УКУ), после датчика (5) угла поворота ротора (ДУПР) ГДУ, состоящее из генератора (36) прямоугольных импульсов (ГПИ) для управления электронным ключом 37 (ЭК1), сумматора (38) с резисторами R1-R3 и интегратора (39), которые формируют треугольное напряжение, при этом резисторы R1 и R2 обеспечивают необходимую амплитуду и смещение относительно нуля треугольного напряжения, отрицательная обратная связь по постоянному напряжению (сигнал "ООС Uп") через резистор R3 - для устранения дрейфа постоянной составляющей выходного напряжения интегратора. Компаратор (42), представляющий собой широтно-импульсный модулятор, в зависимости от величины постоянного напряжения "U(ϕвн)" с выхода датчика (30) угла вертикального наведения (ДУ ВН), формирует прямоугольные импульсы со скважностью, пропорциональной значению U(ϕвн). Указанные импульсы управляют работой электронного ключа 40 (ЭК2), входящего в состав усилителя с импульсной отрицательной обратной связью, состоящего также из операционного усилителя 41 (ОУ) и резисторов R4, R5, R6 (на фиг. 2 конденсаторы в цепи отрицательной обратной связи операционного усилителя для подавления переменной составляющей не показаны). Таким образом, коэффициент передачи ОУ определяется величиной U(ϕвн) постоянного напряжения и происходит компенсация падения коэффициента передачи по оси горизонтального наведения при ненулевом положении ГДУ по вертикали.
Принцип работы УККП поясняется эпюрами, изображенными на фиг. 3: 1-я эпюра - импульсы с выхода ГПИ, 2-я эпюра - напряжения на входах К (инвертирующем и неинвертирующем; при этом треугольное напряжение регулируется резисторами R1 и R2 таким образом, чтобы нижняя его вершина совпадала с нулем, а верхняя - с максимальным положительным значением "U(ϕвн)"), 3-я эпюра - импульсы на выходе К. При этом, при соотношении сопротивлений резисторов: R5/R4=1,302 и R5/R6=3,924, происходит аппроксимация требуемой для компенсации падения коэффициента передачи арккосинусной зависимости Кпер ОУ=f(U(ϕвн)) с погрешностью не более ±5%, которая вполне приемлема для канала стабилизации.
Устройство защиты от перегрева датчиков стабилизации (УЗП) ДС, изображенное на фиг. 4, состоит из сумматора (43) сигналов U(I)1 и U(I)2 с токоизмерительных резисторов мостового усилителя мощности, входящего в состав соответствующего УКУ (эти резисторы входят в схему защиты от перегрузки по току в составе УКУ); с выхода сумматора сигнал, пропорциональный току через датчики 13 или 9 стабилизации (указанные резисторы, УКУ и ДС входят в состав системы стабилизации [1]), поступает на вход интегрирующего усилителя 45 (ИУ), который служит для усиления указанных сигналов и одновременно исключения ложного срабатывания устройств защиты от кратковременного повышения тока через ДС. На входы компаратора (46) поступают постоянные напряжения: с выхода ИУ (от 0 до - 3 В) и термокомпенсирующего источника 44 опорного напряжения (ТИОН), равное - 3 В. (напряжение с выхода ТИОН имеет отрицательный температурный коэффициент - это необходимо для увеличения порога срабатывания по току и времени включения ДС при пониженной рабочей температуре, при которой возрастает момент трения в подшипниках карданова подвеса, а для ДС при этом допускается большая величина температуры перегрева). Компаратор охвачен положительной обратной связью через конденсатор С1, который одновременно обеспечивает гистерезис для устойчивой работы схемы и формирование времени выключения ДС (время включения - схема (УЗП) ДС не препятствует работе соответствующего канала стабилизации, время выключения - УКУ заблокирован положительным напряжением с выхода компаратора через диод VD2, при этом принудительно включается схема защиты от перегрузки по току, входящая в состав УКУ).
Принцип работы (УЗП) ДС поясняется эпюрами, изображенными на фиг. 5: 1-я эпюра - напряжения с токоизмерительных резисторов УКУ, 2-я и 3-я эпюры - напряжения на входах компаратора - с выхода ИУ и нижнего вывода С1, 4-я эпюра - выходное напряжение компаратора. (УЗП) ДС работает следующим образом: при включенном состоянии и наличии механического заклинивания происходит рост отрицательного напряжения на выходе ИУ (постоянная времени в цепи обратной связи ИУ при этом определяет время включения). При равенстве его значения напряжению на нижнем выводе конденсатора С1 (в этот момент равно выходному напряжению ТИОН - 3 В), происходит переключение выходного напряжения компаратора с отрицательного на положительное значение. В этом случае напряжение на верхнем выводе С1 также резко возрастает до максимального положительного значения (через диод VD3), на нижнем выводе С1 при этом потенциал на 3 В ниже потенциала верхнего. Далее в схеме одновременно происходят два процесса: снижение выходного напряжения ИУ до нуля (так как при этом напряжение на его входе также равно нулю) и заряд С1 (нижний вывод) до нуля через резистор R8 (время его заряда определяет время выключения, диод VD1 при этом под обратным напряжением). При равенстве нулю напряжений на входах компаратора происходит переключение его выходного напряжения с положительного на отрицательное значение, и на нижнем выводе С1 снова устанавливается напряжение, равное - 3 В (низкоомный резистор R7 и диод VD1 служат для ускоренного разряда конденсатора, для обеспечения его готовности к очередному циклу). В случае, если механическое заклинивание не устранено, указанный процесс происходит циклически, при этом соотношение времен включения и выключения выбрано таким, чтобы средняя мощность на ДС при этом не превышала допустимого значения, а напряжение на ДС в момент включения достигает максимального значения - напряжения питания, обеспечивая, таким образом, преодоление большего момента трения подвижной части по сравнению с известной системой стабилизации.
Источники информации
1. Патент РФ №2225024, МПК G02B 27/64, приоритет от 01.07.2002 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА СТАБИЛИЗАЦИИ ИЗОБРАЖЕНИЯ НА ПОДВИЖНОМ ОСНОВАНИИ | 2021 |
|
RU2781092C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ИЗОБРАЖЕНИЯ НА ПОДВИЖНОМ ОСНОВАНИИ | 2002 |
|
RU2225024C1 |
| СИСТЕМА УПРАВЛЕНИЯ ОГНЁМ | 2013 |
|
RU2548376C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1995 |
|
RU2102785C1 |
| ПРИВОД НАВЕДЕНИЯ И СТАБИЛИЗАЦИИ ТАНКОВОГО ВООРУЖЕНИЯ | 1998 |
|
RU2138758C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2528105C2 |
| Система стабилизации изображения на подвижном основании | 2019 |
|
RU2753162C2 |
| СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ | 2000 |
|
RU2187060C2 |
| Двухосная стабилизация изображения на подвижном основании без ограничения углов прокачки | 2023 |
|
RU2833345C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2364886C1 |

Изобретение относится к области оптического приборостроения и может быть использовано в гиростабилизированных устройствах, размещаемых на подвижных объектах, для повышения точности стабилизации при больших углах наведения и надежности функционирования при эксплуатации. Предложена система стабилизации изображения на подвижном основании, содержащая индикаторную гироскопическую платформу с установленным на ней зеркалом, карданов подвес, выполненный в виде наружной и внутренней рам, трехстепенной гироскопический датчик угла (ГДУ) с датчиками момента (ДМ) и датчиками угла поворота ротора (ДУПР) ГДУ. Технический результат заключается в повышении точности и надежности системы стабилизации и достигается за счет введения в канал стабилизации по оси горизонтального наведения устройства коррекции коэффициента передачи, устраняющее увеличение ошибки стабилизации по горизонту при отклонении платформы с гироскопическим датчиком угла (ГДУ) от нулевого положения по вертикали, а также изменения схемы устройства защиты от перегрева датчиков стабилизации, которое обеспечивает их защиту при возникновении механического заклинивания и устойчивое автоматическое восстановление системы стабилизации после устранения внешнего механического воздействия. 5 ил.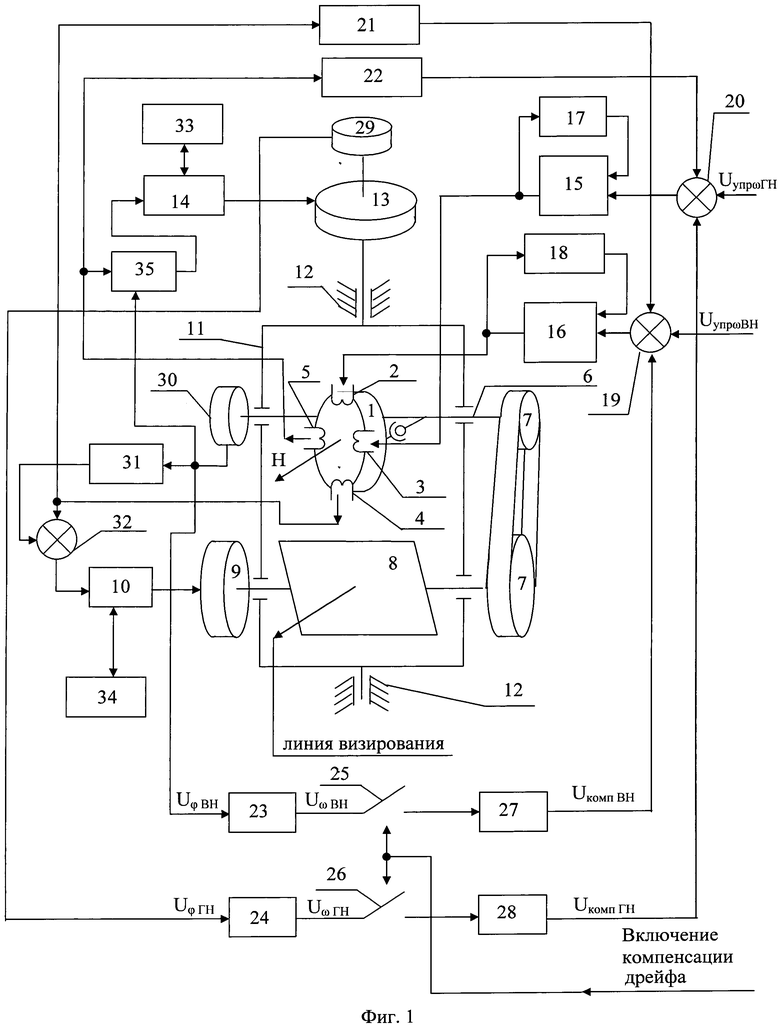
Система стабилизации изображения на подвижном основании, содержащая индикаторную гироскопическую платформу с установленным на ней зеркалом, карданов подвес, выполненный в виде наружной и внутренней рам, трехстепенной гироскопический датчик угла (ГДУ) с датчиками момента (ДМ) и датчиками угла поворота ротора (ДУПР) ГДУ, выходы которых через усилительно-корректирующие устройства (УКУ) соответствующих каналов стабилизации соединены с входами датчиков стабилизации (ДС) рам подвеса, два канала управления скоростью разворота платформы (КУСРП) с усилительным звеном (УЗ) в каждом канале, подключенным к входу соответствующего ДМ ГДУ, два пороговых устройства для защиты ротора (ПУЗР) ГДУ от удара о механические упоры, своими входами подключенные к ДУПР ГДУ, а выходами через первый и второй сумматоры подключенные к первым входам УЗ КУСРП, и два устройства защиты от перегрева (УЗП) ДС, каждое из которых состоит из интегратора (И), порогового устройства (ПУ), электронного ключа (ЭК) и двухполярного ограничителя напряжения, соединенные с УКУ каждого канала стабилизации, при этом ГДУ установлен на вспомогательной оси, которая через ленточную передачу с коэффициентом передачи 1:2 связана с зеркалом, устройство компенсации ошибки ленточной передачи (УКОЛП), два устройства защиты от перегрева (УЗП) ДМ ГДУ, два устройства компенсации дрейфа линии визирования (УКДЛВ), датчик угла вертикального наведения (ДУ ВН) и датчик угла горизонтального наведения (ДУ ГН), соединенные с входами УКДЛВ, причем ДУ ВН соединен также с входом УКОЛП, выход которого соединен через третий сумматор с входом УКУ по каналу вертикального наведения, выходы УКДЛВ соединены через первый и второй сумматоры с первыми входами УЗ КУСРП, входы УЗП ДМ ГДУ соединены с выходами УЗ КУСРП, а их выходы со вторыми входами УЗ КУСРП, отличающаяся тем, что содержит устройство коррекции коэффициента передачи (УККП), состоящее из генератора прямоугольных импульсов, сумматора, интегратора, компаратора, вход которого соединен с ДУ ВН, и операционного усилителя с импульсной обратной связью, выход которого соединен с входом УКУ, а вход с (ДУПР) ГДУ, при этом каждое из (УЗП) ДС, состоящее из сумматора, интегрирующего усилителя, компаратора, термокомпенсирующего источника опорного напряжения, соединено с УКУ двух каналов стабилизации.
| СИСТЕМА СТАБИЛИЗАЦИИ ИЗОБРАЖЕНИЯ НА ПОДВИЖНОМ ОСНОВАНИИ | 2002 |
|
RU2225024C1 |
| RU 2059206 C1, 27.04.1996 | |||
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ОПТИЧЕСКОГО ИЗОБРАЖЕНИЯ | 1994 |
|
RU2091843C1 |
| DE 102008039468 A1, 04.03.2010 | |||
| СПОСОБ СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ЦЕЛИ | 2011 |
|
RU2463622C1 |
| US 4643539 A1, 17.02.1987. | |||

