Объектом предлагаемого изобретения является способ выведения некоторого космического аппарата типа искусственного спутника Земли на требуемую для его нормального функционирования орбиту путем его перевода на эту орбиту с некоторой исходной эллиптической орбиты отделения от носителя, существенно отличающейся, и в частности, более эксцентрической, чем требуемая для данного космического аппарата орбита.
В настоящее время искусственные спутники Земли в своем большинстве оборудованы системой двигателей, позволяющей им перемещаться в пространстве, в частности, для корректировки погрешностей их траекторий, связанных, например, с погрешностями выведения их на нужную орбиту, с гравитационными возмущениями, связанными с воздействием на параметры орбиты влияния Луны, Солнца, эффектами не строго сферического потенциала земного притяжения, а также с аэродинамическими, магнитными, электрическими воздействиями Земли и воздействиями солнечного излучения.
Двигательная система современных спутников позволяет также выводить их в заданную точку геостационарной орбиты, осуществлять те или иные изменения орбиты, обеспечивать требуемую ориентацию спутника в пространстве, а также обеспечение продолжительного функционирования системы контроля и управления угловым положением данного космического аппарата, обеспечивая функцию десатурации массивных колес маховиков, которыми обычно оборудуются эти спутники.
Такие двигательные системы обычно обеспечивают спутнику способность перемещения в любом направлении в пространстве, причем как правило одно из этих направлений является привилегированным и предназначенным для осуществления движений относительно большой амплитуды.
В том, что касается массового баланса, следует отметить, что масса двигательной системы спунтика занимает в ней весьма значительное место, если не первое.
Большинство производителей двигательных установок для спутников проявило большой интерес к новым технологиям, позволяющим существенно снизить массу двигательной системы. Зная, что удельный импульс или удельная тяга представляют собой специфический параметр ракетного двигателя, характеризующий импульс, развиваемый единицей отброшенной или потребленной массы, двигатели с большим удельным импульсом были разработаны, усовершенствованы и испытаны с оценкой самых различных их параметров. Можно упомянуть, например, двигатели типа "резистоджет", плазменные двигатели с замкнутым дрейфом электронов, двигатели с излучением поля FEEP, ионные двигатели с бомбардировкой, гелиотермические двигатели.
В принципе увеличение удельного импульса основывается на преобразовании мощности нулевой массы, то есть некоторой мощности, создание которой практически не нуждается в расходовании массы материала, в механическую мощность, приложенную к частицам материала. Эта мощность нулевой массы на практике представляет собой электрическую мощность или тепловую мощность, полученную из солнечного излучения, или мощность, полученную при помощи радиоизотопного генератора.
Тяга, обеспечиваемая такими двигателями с высоким удельным импульсом, зависит, таким образом, от уровня электрической или тепловой мощности, которая может быть к ним подведена. В условиях искусственного спутника Земли эта мощность ограничена размерами солнечных генераторов электрической энергии, или размерами концентраторов тепловой энергии Солнца, или размерами радиоизотопного генератора, или, наконец, размерами аккумуляторов энергии. Из этого следует, что тяга, развиваемая любым двигателем с высоким удельным импульсом, меньше или даже значительно меньше тяги, развиваемой традиционным химическим ракетным двигателем и составляющей, например, 400 Н (типичная величина для корректирующего двигателя, предназначенного для перехода спутника на менее вытянутую эллиптическую орбиту или круговую орбиту).
Удельный импульс двигателя имеет тем более высокое значение, чем выше электрическая или тепловая мощность, преобразованная в механическую мощность, приложенную к одной и той же массе частиц. Таким образом, чем больше двигателей имеют высокий удельный импульс, тем меньше тяга каждого из них при одной и той же потребляемой электрической или тепловой мощности. Такая особенность характерна практически для всех типов ракетных двигателей с высоким удельным импульсом.
Эта особенность сказывается на уровне систем ракетных двигателей спутника следующим образом: для одного и того же полного выдаваемого импульса (который представляет собой суммарную величину или интеграл по полной продолжительности работы силы, развиваемой двигателем в единицу времени) имеет место одновременно значительное снижение массы расходуемого материала, потребляемого двигателями с высоким удельным импульсом, и также значительное увеличение продолжительности функционирования таких ракетных двигателей.
Тип создания тяги с высоким удельным импульсом оказывается подходящим для практического использования и позволяет обеспечить реальные преимущества по сравнению с системами, где тяга создается химическими способами (и где удельный импульс имеет меньшую величину), для выполнения маневров, осуществляемых в том случае, когда данный спутник находится на своей номинальной эксплуатационной орбите и когда требуется приложение к нему малых и очень малых усилий.
Иначе обстоит дело в том случае, когда отделение спутника от носителя осуществляется на орбите, существенно отличающейся от его номинальной орбиты, в результате чего спунтику приходится задействовать свою собственную двигательную систему для осуществления перехода со своей орбиты отделения от носителя на свою номинальную эксплуатационную орбиту.
Действительно, в этом случае полная продолжительность маневра перехода с одной орбиты на другую может оказаться весьма значительной. Однако по многочисленным соображениям следует стремиться по возможности минимизировать эту продолжительность активного маневрирования спутника.
Действительно, чем больше полная продолжительность маневра перехода спутника с одной орбиты на другую, тем выше финансовые затраты и полная стоимость выведения этого спутника на номинальную орбиту (с учетом расходов на активное функционирование наземных станций контроля и управления и работу коллективов соответствующих специалистов на земле). В то же время, большая продолжительность маневра межорбитального перехода повышает опасность повреждения данного космического аппарата при пересечении им поясов Ван Аллена (местоположение которых вообще-то является переменным, но которые скорее всего могут располагаться, например, на высотах порядка 1800, 2000, 10000, 21000 км).
Может оказаться желательным сократить до минимума количество оборотов, которое данный космический аппарат совершает, проходя по промежуточным орбитам, пересекающим пояса Ван Аллена, в частности, для того, чтобы минимизировать дополнительное твердение компонентов спутника или ячеек солнечных батарей под действием электромагнитных волн или радиации, исходящих от фотонов или электронов, присутствующих в этих поясах.
Уже были предложены различные варианты и примеры маневров искусственных спутников Земли, осуществляемых с использованием ракетных двигателей с высоким удельным импульсом и относительно малой тягой.
Так, статья A.G. Schwer, U.M. Schоttle, E. Messerschmid из Штутгартского университета (Германия), опубликованная в ходе 46-го Международного Астронавтического Конгресса в 1995 году и озаглавленная "Operational Impacts and Environmental Effects on Low-Thrust Transfer-Mission of Telecommunication Satellites", показывает, в качестве примера, маневр перехода между классической орбитой отделения от носителя, представляющей собой геостационарную переходную орбиту (GTO), причем в этом примере в качестве носителя использовалась ракета Ариан 4, и конечной орбитой, которая представляет собой некоторую геостационарную орбиту (GEO). Данный маневр перехода содержит большое число участков включения корректирующих двигателей в зоне апогея орбиты GTO, в качестве которых использовались двигатели типа "Аркджет" ("Arcjet") с высоким удельным импульсом, таким образом, чтобы орбита спутника постепенно деформировалась вплоть до достижения конечной геостационарной орбиты GEO, предназначенной для эксплуатации данного спутника.
Европейский патент ЕР-В 0047211 (изобретение A. Mortefette) также описывает способ изменения орбиты спутника при помощи дуговых участков включения тяги двигателей.
В обоих способах, описанных в двух упомянутых выше документах, апогей орбиты вынуждается оставаться постоянным или подвергается лишь весьма незначительной эволюции. Необходимая продолжительность описанных выше маневров оказывается достаточно большой, и для уменьшения этой продолжительности необходимо увеличить тягу системы двигателей данного спутника. В то же время, количество включений двигательной установки также весьма велико, и это может породить существенные эксплуатационные трудности.
Действительно, когда спутник движется по орбите с изменяющимся сидерическим периодом, постоянно эволюционирующим в функции степени продвижения к номинальной орбите данного спутника и значительно отличающимся от сидерического периода вращения Земли, этот спутник не всегда оказывается в зоне прямой видимости с одной и той же наземной станции слежения в тот момент, когда необходимо включить двигатели. Из этого следует, что операция выведения спутника на его номинальную орбиту, требующая многочисленных включений двигателей, не может быть выполнена при обеспечении полной безопасности с использованием только одной наземной станции слежения. В этом случае необходима возможность использования на протяжении всего периода выведения данного спутника на его номинальную орбиту нескольких наземных станций слежения, расположенных в разных местах. При этом следует отметить, что стоимость соответствующих наземных операций и аренда станций слежения является высокой.
Для тех типов выведения спутника на заданную орбиту, которые были рассмотрены в упомянутых выше документах, задача снижения полной продолжительности такого маневра наилучшим образом решается в том случае, если на данном спутнике установлены корректирующие двигатели с большой тягой. Однако в этом случае, при одинаковой мощности, развиваемой двигателями, удельный импульс будет относительно небольшим и, следовательно, масса, расходуемая в ходе данного маневра, будет существенно большей. Различные технические решения, уже предложенные для этого типа или способа выведения спутника на номинальную орбиту, оказались малоэффективными.
В то же время, Ирвингом (Irving) уже было предложено для перехода с одной исходной круговой орбиты на другую конечную круговую орбиту обеспечить непрерывную работу корректирующих двигателей, ориентированных либо вдоль местной горизонтали, либо вдоль вектора орбитальной скорости (скорость относительно Земли), для того, чтобы орбита постепенно деформировалась и достигла в конечном счете непосредственной окрестности заданной номинальной орбиты данного спутника или даже самой этой орбиты. Этот способ осуществления перехода с одной орбиты на другую приводит к формированию некоторой траектории спирального типа и характеризуется одним единственным включением корректирующего двигателя, обеспечивающим реализацию всего маневра.
Однако в этом случае количество оборотов данного спутника, проходящих через упомянутые пояса Ван Аллена, не поддается оптимизации, что является нежелательным. Но главное состоит в том, что этот тип маневра применяется в настоящее время только для переходов между круговыми орбитами или, в случае необходимости, между специфическими эллиптическими орбитами.
Кроме того, было предложено осуществлять комбинацию некоторой совокупности маневров, выполняемых при помощи дуговых участков включения корректирующей тяги, и некоторого последующего маневра спирального типа с постоянным включением тяги в рамках некоторого специального маневра, описанного в европейском патенте ЕР-А 0673833 (изобретение А. Spitzer).
Этот тип маневра выведения спутника на заданную орбиту оказывается малоэффективным, в частности, по продолжительности выполнения, когда используется только двигатель с высоким удельным импульсом или с относительно малой тягой. Количество оборотов, пересекающих пояса Ван Аллена, остается достаточно большим и количество включений двигателя также оказывается значительным, причем это значительное число включений необходимо именно в первой фазе увеличения высоты перигея, когда сидерический период орбиты спутника особенно сильно отличается от сидерического периода земного вращения.
A. Spitzer предложил еще одно решение, использующее некоторую "гибридную" тягу, то есть одновременно обычные химические ракетные двигатели включаются на первой фазе маневра, выполняемого при помощи множества дуговых участков тяги, и двигатели с высоким удельным импульсом включаются во второй фазе маневра спирального типа. В этом случае полная продолжительность маневра перехода спутника с одной орбиты на другую существенно сокращается и количество оборотов, пересекающих пояса Ван Аллена, также снижается.
Зато масса, расходуемая спутником в процессе осуществления такого маневра, оказывается относительно большой. Но главное состоит в том, что в этом случае на борту спутника присутствуют два различных типа систем создания реактивной тяги, в результате чего существенно возрастает стоимость такого спутника по сравнению с системами, оборудованными только одним типом ракетных двигателей, усложняется конструкция данного космического аппарата, увеличивается стоимость его подготовки и запуска на орбиту, в частности, из-за необходимости заполнения различных резервуаров различными продуктами и соблюдения специальных мер предосторожности, исключающих опасность загрязнения этих продуктов или пожара.
В основу предлагаемого изобретения положена задача устранить отмеченные выше недостатки и обеспечить возможность, в частности, для спутника, отделенного от ракеты-носителя или от некоторого космического аппарата на некоторой орбите, которая не является номинальной эксплуатационной орбитой данного спутника, перейти на эту номинальную орбиту особенно эффективным образом, используя для этого реактивные двигатели с высоким удельным импульсом и относительно малой тягой, обеспечить возможность минимизации продолжительности маневра перехода спутника с некоторой орбиты отделения от носителя на номинальную эксплуатационную орбиту, повысить безопасность выполняемых маневров и снизить стоимость изготовления космического аппарата типа искусственного спутника Земли и стоимость его эксплуатации, а также снизить опасность, связанную с использованием высокотоксичных и пожароопасных химических веществ.
Поставленная задача решается с использованием способа выведения на орбиту, предназначенного для размещения некоторого космического аппарата типа искусственного спутника Земли на некоторой номинальной орбите, адаптированной для нормального эксплуатационного функционирования этого космического аппарата, исходя из некоторой эллиптической орбиты отделения этого космического аппарата от носителя, существенно отличающейся от упомянутой номинальной орбиты и, в частности, более эксцентрической, чем эта номинальная орбита.
Предлагаемый способ выведения на орбиту отличается тем, что данный космический аппарат принудительно описывает некоторую спиральную траекторию, состоящую из множества промежуточных орбит, в результате единственного включения и непрерывной работы системы реактивных двигателей коррекции орбиты с высоким удельным импульсом, установленных на данном космическом аппарате, производится контроль эволюции упомянутой спиральной траектории таким образом, чтобы при каждом последующем витке, по меньшей мере на протяжении первой фазы маневра, происходило увеличение высоты перигея, эволюция в определенном направлении высоты апогея и уменьшение возможной погрешности наклонения промежуточной орбиты по отношению к номинальной орбите, а затем, по меньшей мере на протяжении некоторой второй фазы маневра, эволюции высот перигея контролируются индивидуально в предварительно определенных постоянных направлениях при том, что продолжается уменьшение возможной погрешности наклонения очередной промежуточной орбиты по отношению к номинальной орбите, до тех пор, пока высота апогея, перигея и орбитальные наклонения очередной промежуточной орбиты данного космического аппарата не достигнут значений, характерных для упомянутой номинальной орбиты.
Система двигателей с высоким удельным импульсом может, в случае необходимости, содержать только один такой двигатель с высоким удельным импульсом.
Таким образом, для реализации вывода на номинальную орбиту в соответствии с предлагаемым изобретением необходим только один тип двигателей.
Однако в данном случае не исключается возможность использования вспомогательных двигателей других типов, таких, например, как двигатели на холодном газе или двигатели типа "резистоджет", использующие тот же самый газ, что и двигатели с высоким удельным импульсом, например ксенон, для того, чтобы располагать на короткие промежутки времени, более значительной тягой, не получая при этом упомянутых выше недостатков, связанных с использованием двигателей на химическом топливе.
Такие вспомогательные двигатели могут быть использованы в начальной фазе упомянутого маневра межорбитального перехода для, например, компенсации возмущающих моментов, возникающих в результате раскрытия панелей солнечных батарей и антенн спутника после его отделения от носителя.
В соответствии с первым вариантом реализации способа по данному изобретению, в случае космического аппарата, отделенного от носителя на некоторой эллиптической орбите, существенно отличающейся от эллиптической орбиты, расчитанной для нормального эксплуатационного функционирования данного космического аппарата, на протяжении первой фазы межорбитального маневра с самого начала периода непрерывной работы корректирующих двигателей на каждом последующем обороте или витке осуществляется увеличение высоты апогея и несколько меньшее увеличение высоты перигея следующей промежуточной орбиты, а затем, на протяжении второй фазы упомянутого маневра и вплоть до окончания периода непрерывной работы корректирующих двигателей, на каждом последующем витке осуществляется уменьшение высоты апогея и увеличение высоты перигея очередной промежуточной орбиты.
В соответствии со вторым возможным вариантом реализации способа по данному изобретению на протяжении первой фазы межорбитального маневра и с самого начала периода непрерывной работы корректирующих двигателей на каждом последующем витке осуществляется увеличение высоты апогея и увеличение высоты перигея соответствующей промежуточной орбиты, а затем, на протяжении второй фазы упомянутого маневра, примерно до середины периода непрерывной работы двигателей, на каждом последующем витке осуществляется уменьшение высоты апогея и увеличение высоты перигея соответствующей промежуточной орбиты, после чего, на протяжении третьей фазы маневра, когда эксцентриситет некоторой промежуточной орбиты данного космического аппарата достигнет эксцентриситета расчетной номинальной орбиты этого аппарата в конце периода непрерывной работы корректирующих двигателей, на каждом последующем витке осуществляется уменьшение высоты апогея и уменьшение возможной погрешности наклонения некоторой промежуточной орбиты по отношению к упомянутой расчетной номинальной орбите данного космического аппарата вплоть до того момента, пока высоты апогея и перигея, а также орбитальные наклонения некоторой промежуточной орбиты данного космического аппарата, не достигнут значений, соответствующих расчетной номинальной орбите.
В соответствии с третьим возможным вариантом реализации способа по данному изобретению на протяжении первой фазы маневра с самого начала периода непрерывной работы корректирующих двигателей на каждом последующем витке осуществляется уменьшение высоты апогея и увеличение высоты перигея соответствующей промежуточной орбиты, а затем, в ходе второй фазы этого маневра, и в конце периода непрерывной работы двигателей коррекции орбиты, когда эксцентриситет некоторой промежуточной орбиты данного космического аппарата достигает эксцентриситета, характерного для расчетной номинальной орбиты, на каждом последующем витке осуществляется уменьшение высоты апогея и уменьшение высоты перигея последующей промежуточной орбиты.
Предлагаемое изобретение касается также системы выведения на орбиту, предназначенной для размещения некоторого космического аппарата типа искусственного спутника Земли на некоторой расчетной номинальной орбите, адаптированной для нормального эксплуатационного функционирования, исходя из некоторой эллиптической орбиты отделения от носителя, существенно отличающейся от расчетной номинальной орбиты, в частности, имеющей отличный от этой номинальной орбиты эксцентриситет.
Предлагаемая система выведения космического аппарата на орбиту отличается тем, что она содержит:
- некоторую совокупность платформ, установленных на данном космическом аппарате;
- некоторую совокупность двигателей, установленных на упомянутых платформах и отличающихся высоким удельным импульсом, превышающим 5000 Н•с/кг, и относительно небольшой тягой, имеющей величину менее 10 Н, и предназначенных для создания полной тяги, приложенной к данному космическому аппарату;
- устройство управления включением упомянутых выше двигателей в непрерывный режим работы после отделения данного космического аппарата от носителя для обеспечения возможности для данного космического аппарата достигнуть при помощи спиральной траектории с возможными прерываниями на грани существующих ограничений некоторой расчетной номинальной орбиты, и их выключения после того, как высота апогея, высота перигея и наклонение очередной промежуточной орбиты данного космического аппарата достигнут значений, соответствующих расчетной номинальной орбите этого аппарата;
- устройство управления ориентацией вектора тяги системы двигателей коррекции орбиты, содержащее по меньшей мере первые средства, предназначенные для генерирования в процессе осуществления первой фазы непрерывного функционирования системы двигателей данного космического аппарата некоторой первой команды ориентации упомянутого вектора полной тяги двигателей этого космического аппарата, приводящей на каждом последующем витке движения и для каждой промежуточной орбиты этого космического аппарата к некоторому увеличению высоты апогея данной орбиты, к некоторому меньшему по величине увеличению высоты перигея этой орбиты и к уменьшению возможной погрешности наклонения этой промежуточной орбиты по отношению к наклонению расчетной номинальной орбиты данного космического аппарата, и по меньшей мере некоторые вторые средства, предназначенные для генерирования в процессе осуществления второй фазы функционирования двигателей коррекции орбиты данного космического аппарата некоторой второй команды ориентации вектора полной тяги, приводящей на каждом последующем витке этого космического аппарата и для каждой промежуточной орбиты к некоторому уменьшению высоты апогея этой орбиты, к некоторому увеличению высоты ее перигея и к уменьшению возможной погрешности наклонения данной промежуточной орбиты по отношению к наклонению расчетной номинальной орбиты данного космического аппарата типа искусственного спутника Земли.
В предпочтительном варианте реализации система корректирующих двигателей, имеющих высокий удельный импульс, содержит двигатели плазменного типа с замкнутым отклонением электронов, ионные двигатели или двигатели типа "Аркджет" (то есть двигатели с электрической дугой).
В соответствии с одним из возможных способов реализации предлагаемого изобретения упомянутые выше первые и вторые средства, предназначенные для генерирования первой и второй команд управления ориентацией вектора полной тяги системы корректирующих двигателей данного космического аппарата, приводятся в действие на тот период, когда упомянутое устройство управления включением этих двигателей в непрерывный режим работы задействуется для осуществления именно этого режима.
Более конкретно, упомянутые первые средства упомянутого устройства управления ориентацией вектора тяги системы корректирующих двигателей данного космического аппарата содержат некоторые средства позиционирования вектора полной тяги в локальной или местной горизонтальной плоскости, принципиально ориентированной в направлении вектора орбитальной скорости данного космического аппарата.
В этом случае упомянутые вторые средства упомянутого устройства управления ориентацией вектора тяги содержат некоторые средства позиционирования вектора полной тяги в зоне апогея орбиты в местной горизонтальной плоскости, принципиально ориентированной в направлении вектора орбитальной скорости данного космического аппарата, и средства позиционирования вектора полной тяги в зоне перигея орбиты вдоль направления, противоположного направлению вектора орбитальной скорости этого космического аппарата, и в плоскости, строго перпендикулярной плоскости орбиты.
Средства позиционирования вектора полной тяги в зоне апогея орбиты ориентируют этот вектор полной тяги строго на оскуляторный или соприкасающийся полуэллипс, центрированный на апогее орбиты.
Средства позиционирования вектора полной тяги в зоне перигея орбиты ориентируют этот вектор полной тяги строго на оскуляторный или соприкасающийся полуэллипс, центрированный на перигее орбиты.
В соответствии с возможным вариантом реализации предлагаемого изобретения упомянутые вторые средства упомянутого устройства управления ориентацией вектора тяги содержат средства позиционирования вектора тяги в некоторой плоскости, проходящей вдоль некоторых фиксированных или квазификсированных в пространстве направлений и проходящей через перпендикуляр к касательной орбитальной плоскости.
Система может содержать средства ориентации вектора полной тяги, образованные собственными средствами ориентации данного космического аппарата, такими, например, как инерционные колеса или маховики системы контроля углового положения этого космического аппарата.
Эта система может также содержать средства ориентации вектора полной тяги, образованные по меньшей мере некоторыми из упомянутых опорных платформ системы двигателей коррекции орбиты, которые в этом случае являются подвижными. Могут быть использованы также двигатели с модулируемой тягой.
Система в соответствии с предлагаемым изобретением может содержать средства ориентации вектора полной тяги, имеющие в своем составе средства дифференциальной регулировки или выставки упомянутых ориентируемых платформ и средства автоматического управления тягой каждого двигателя для ее поддержания на некотором предварительно определенном уровне, позволяющие реализовать полную тягу, вектор которой проходит через центр масс данного космического аппарата, имеющую некоторую составляющую вне орбитальной плоскости.
В предпочтительном варианте реализации упомянутые ориентируемые платформы двигателей имеют возможность перемещения на угол более 10o вокруг по меньшей мере одной оси.
В соответствии с предпочтительным вариантом использования предлагаемого изобретения двигатели, имеющие высокий удельный импульс, образуют также средства контроля углового положения и коррекции орбиты космического аппарата типа спутника.
Можно отметить, что при использовании способа в соответствии с предлагаемым изобретением, выполняя непрерывное увеличение высоты перигея орбиты, завершающееся, в случае необходимости, некоторым уменьшением его высоты, и некоторое изменение высоты апогея орбиты, начинающееся с ее увеличения и завершающееся некоторым уменьшением этой высоты, можно практически с любой эллиптической орбиты отделения от носителя перейти на любую из множества самых разных конечных орбит, непрерывно поддерживая при этом двигатели во включенном состоянии.
В частности, в том случае, когда орбита отделения данного космического аппарата от носителя и конечная номинальная орбита этого аппарата обладают близкими значениями высоты апогея, в соответствии с предлагаемым изобретением достаточно действовать таким образом, чтобы увеличение высоты апогея орбиты в процессе работы двигателей было строго равно уменьшению его высоты. В этом случае весь маневр перехода с одной орбиты на другую может в конечном счете быть сведен к увеличению высоты перигея исходной орбиты.
И хотя тип межорбитального маневра, определяемый способом и системой в соответствии с предлагаемым изобретением, может быть применен на любых эллиптических орбитах отделения данного космического аппарата от носителя относительно его номинальной орбиты, использование данного изобретения оказывается наиболее выгодным в том случае, когда орбита отделения от носителя, являющаяся исходной для данного космического аппарата, представляет собой достаточно эксцентрическую эллиптическую орбиту (с эксцентриситетом, превышающим 0.2) с несколько меньшим сидерическим периодом, чем сидерический период номинальной орбиты данного космического аппарата (что подразумевает, в частности, что высота перигея исходной орбиты отделения от носителя будет несколько меньшей, чем высота перигея конечной номинальной орбиты этого космического аппарата), имеющую высоту апогея, близкую к высоте апогея конечной номинальной орбиты, а конечная номинальная орбита данного космического аппарата является круговой или слегка эксцентрической (с эксцентриситетом менее 0.1).
Такие случаи имеют место при запусках на переходную геостационарную орбиту некоторого геостационарного спутника или при запуске на переходную орбиту спутника, предназначенного для работы на круговой номинальной орбите средней высоты (например, порядка 20000 км). Действительно, последовательное увеличение высоты апогея орбиты в процессе работы двигателей такого космического аппарата или спутника приводит к наилучшей эффективности выполняемого в данном случае межорбитального маневра, который состоит главным образом в увеличении высоты перигея орбиты. На конечном этапе работы двигателей данного космического аппарата последовательное уменьшение высоты апогея орбиты приводит к дополнительному расходу двигателями рабочего тела, однако этот расход остается не слишком большим и в целом позволяет существенно уменьшить общую продолжительность данного маневра.
Способ в соответствии с предлагаемым изобретением может применяться выгодным образом в том случае, когда исходная орбита отделения данного спутника от носителя является эллиптической с сидерическим периодом, меньшим, чем сидерический период конечной номинальной орбиты этого спутника, причем высота апогея исходной орбиты сильно отличается от высоты апогея конечной номинальной орбиты, и эта конечная орбита является круговой.
Третий возможный вариант реализации предлагаемого изобретения специально адаптирован для минимизации количества оборотов данного спутника по промежуточным орбитам, пересекающим пояса Ван Аллена. В соответствии с этим способом осуществляется непрерывная работа двигателей с высоким удельным импульсом, и их общая тяга ориентируется, например, таким образом, чтобы увеличивать высоту перигея орбиты и уменьшать высоту ее апогея на каждом последующем витке, а затем, без выключения упомянутых двигателей, их общая тяга переориентируется таким образом, чтобы постоянно уменьшать высоту апогея и одновременно уменьшать высоту перигея промежуточных орбит с тем, чтобы в конечном счете высоты перигея и апогея совпали соответственно с высотами перигея и апогея конечной номинальной орбиты данного спутника.
Такой специфический вариант реализации способа в соответствии с предлагаемым изобретением хорошо адаптирован к случаю выведения некоторого космического аппарата на сильно эксцентрическую эллиптическую исходную орбиту перехода с сидерическим периодом, превышающим или равным сидерическому периоду конечной номинальной орбиты спутника. Характерным предельным примером такого случая является запуск спутника, предназначенного для работы на номинальной геостационарной орбите с периодом обращения в одни сутки, на некоторую исходную эллиптическую орбиту с высотой перигея 620 км и высотой апогея 330000 км, то есть на орбиту с периодом обращения 8 суток. При первоначальной массе данного спутника 2950 кг и полной тяге двигателей коррекции орбиты на уровне 0.64 Н можно включить двигатели с высоким удельным импульсом в соответствии с предлагаемым изобретением таким образом, чтобы в результате иметь всего два витка, проходящих через пояса Ван Аллена. Используя только ограниченное таким образом количество промежуточных орбит, пересекающих упомянутые пояса Ван Аллена, способ в соответствии с предлагаемым изобретением оказывается здесь столь же эффективным, что и классические способы межорбитального маневра, в которых используются двигатели с достаточно большой тягой.
Среди преимуществ способа и системы в соответствии с предлагаемым изобретением можно отметить, что маневр, позволяющий, например, переместить спутник с классической переходной геостационарной орбиты (GТО) на номинальную геостационарную орбиту (GEO) посредством одного единственного включения двигателей, образует важное преимущество, поскольку операции включения ракетных двигателей всегда представляют собой относительно сложную и капризную операцию.
Таким образом, во всех случаях желательно ограничить количество этих операций включения двигателей, поскольку запуск двигателя представляет собой некоторое переходное состояние, которое всегда требует повышенного внимания. Так, например, в случае электрического ракетного двигателя необходимо принять во внимание те несколько минут, которые необходимы для подготовки и собственно запуска такого двигателя, причем в соответствии со специальной хронограммой. Кроме того, в тех случаях, когда для осуществления межорбитального маневра используются несколько двигателей, необходимо иметь возможность обеспечить одновременность запуска всех этих двигатели, особенно если индивидуальный вектор тяги этих двигателей не проходит вблизи центра масс данного космического аппарата. Если такая одновременность включения всех двигателей не обеспечивается, приходится задействовать систему контроля и управления угловым положением этого космического аппарата для того, чтобы компенсировать возмущения его углового положения, возникающие вследствие отсутствия упомянутой одновременности включения двигателей коррекции орбиты. При этом система управления угловым положением может войти в состояние насыщения, и тогда включение двигателей коррекции орбиты должно быть прервано с тем, чтобы попытаться снова сделать это несколько позже.
Таким образом, особенно предпочтительной является возможность действовать так, чтобы в течение всей продолжительности осуществления маневра перехода спутника с орбиты его отделения от носителя на конечную номинальную орбиту, и в частности, по меньшей мере пока сидерические периоды промежуточных орбит существенно отличаются от сидерического периода вращения Земли, имелась необходимость только один единственный раз включать двигатели. Это единственное включение двигателей может быть выполнено в наилучших условиях видимости данного спутника с наземной станции слежения. Таким образом, отпадает необходимость иметь в оперативном распоряжении руководителей полета несколько таких наземных станций. Кроме того, в данном случае конкретное место или момент включения двигателей не столь важны.
Это преимущество возможности одного единственного включения двигателей коррекции орбиты показывает, кроме того, что выведение на заданную орбиту того или иного космического аппарата в соответствии с предлагаемым изобретением хорошо подготовлено к автоматизации управления этим маневром, то есть позволяет обеспечить автономность данного космического аппарата в процессе его перевода на заданную орбиту и, следовательно, сократить расходы на выполнение этого межорбитального маневра.
Другое важное преимущество предлагаемого изобретения заключается в том, что при выполнении полного маневра перехода с одной орбиты на другую необходим только один тип двигателей, а именно, двигатели с высоким удельным импульсом или, в случае необходимости, могут быть использованы некоторые вспомогательные двигатели, в которых применяется тот же инертный газ, что и в этих двигателях с высоким удельным импульсом. Это обстоятельство способствует снижению стоимости самого космического аппарата и его обслуживания и эксплуатации, а также ограничивает возможную опасность, связанную с использованием химических и самовоспламеняющихся продуктов, а также других токсичных продуктов, поскольку основные типы двигателей с высоким удельным импульсом практически не используют этих токсичных или пожароопасных химических продуктов, а работают на некотором инертном газе (таким газом может быть, например, ксенон).
В то же время, поскольку межорбитальный маневр в соответствии с предлагаемым изобретением в принципе подразумевает непрерывную работу двигателей коррекции орбиты, масса рабочего тела, расходуемая этими двигателями в процессе осуществления данного маневра, прямо пропорциональна продолжительности его выполнения. Из этого следует, что в рамках предлагаемого изобретения достаточно оптимизировать ориентацию двигателей в процессе выполнения упомянутого маневра с целью минимизации его полной продолжительности для того, чтобы масса рабочего тела, расходуемого в процессе выполнения этого маневра, также была минимизирована.
Различные методы оптимизации могут быть использованы для определения соответствующих законов ориентации двигателей коррекции орбиты данного спутника при соблюдении предложенных в данном изобретении критериев эволюции параметров апогея и перигея промежуточных орбит этого спутника.
Так, например, в том, что касается ориентации двигателей в начальной стадии маневра перехода спутника с одной орбиты на другую, некоторый закон изменения тяги в местной горизонтальной плоскости оказывается особенно эффективным, если в качестве исходной орбиты перехода используется классическая геостационарная орбита GTO. В том, что касается заключительной стадии этого маневра, то вполне удовлетворительным оказывается некоторый закон изменения тяги в горизонтальной плоскости в зоне апогея орбиты и в тангенциальной плоскости против вектора орбитальной скорости в зоне перигея этой орбиты. Закон с фиксированной или инерциальной ориентацией также может быть выгодным в процессе выполнения такого маневра.
На заключительной стадии упомянутого межорбитального маневра может оказаться предпочтительным, чтобы данный спутник был сориентирован определенным образом в направлении Земли (следствие закона ориентации тяги в местной горизонтальной плоскости) для того, в частности, чтобы осуществить одновременно с завершением маневра выведения на заданную орбиту (и при работающих двигателях коррекции орбиты) некоторые регулировки и настройки, необходимые, например, для полезной нагрузки данного космического аппарата.
Здесь следует отметить, что меры, рекомендуемые в соответствии с предлагаемым изобретением для ориентации двигателей коррекции орбиты данного космического аппарата, оказываются для случая выведения этого космического аппарата на геостационарную орбиту с некоторой классической переходной орбиты особенно хорошо адаптированными к реализации межорбитального маневра относительно малой продолжительности и без заметного увеличения массы расходуемого за это время рабочего тела по сравнению с обычными системами, использующими двигатели на химическом топливе.
Так, в качестве примера можно сказать, что маневр спутника массой 2950 кг, оснащенного плазменными двигателями с общей тягой 0.64 Н и с высоким удельным импульсом, составляющим 16000 Н•с/кг, обладающими удельной мощностью 16 кВт/Н, и отделенного от носителя на геостационарной переходной орбите типа той, которая предусмотрена для ракет-носителей Ариан 5 (высота апогея 36000 км и высота перигея 620 км), продолжается всего 3.7 месяца при потребляемой электрической мощности 10 кВт, и масса рабочего тела, израсходованного для осуществления перехода с упомянутой исходной орбиты на заданную геостационарную орбиту, составляет 380 кг.
Для способа выведения на заданную орбиту в соответствии с предлагаемым изобретением можно ввести понятие удельного импульса маневра, определяемого как отношение полного импульса, выдаваемого двигателями для реализации маневра выведения на заданную орбиту, к исходной массе М в килограммах данного космического аппарата. Этот удельный импульс маневра может быть выражен следующим соотношением:
Ispман.=F•Δt/Mi.
Поскольку в данном случае речь идет о непрерывной работе двигателей коррекции орбиты данного космического аппарата, упомянутый полный выдаваемый двигателями импульс по существу равен произведению силы F (в ньютонах) на продолжительность данного межорбитального маневра (в секундах).
Для рассматриваемого здесь примера значение удельного импульса маневра Ispман. составляет 2070 H•c/кг. Эта величина относительно мало зависит от величины удельного импульса двигателей данного космического аппарата (в той мере, в какой этот удельный импульс является высоким). Это понятие удельного импульса маневра позволяет быстро оценить преимущества и основные характеристики маневра выведения на заданную орбиту в соответствии с предлагаемым изобретением.
Для сравнения можно сказать, что обычный спутник, имеющий ту же самую полезную нагрузку и использующий обычные двигатели коррекции орбиты, работающие на химическом топливе, должен иметь стартовый вес порядка 4100 кг или более чем на тонну веса спутника из приведенного выше примера реализации предлагаемого изобретения, что существенно увеличивает стоимость запуска или, при одной и той же стоимости запуска, вынуждает уменьшить величину полезной нагрузки, то есть рентабельность данного космического аппарата.
В то же время, при использовании спутника с той же полезной нагрузкой, оснащенного двигателями с высоким удельным импульсом порядка 16000 Н•с/кг и с тягой, аналогичной величине тяги, приведенной в упомянутом выше примере (0.64 Н), но использующего для осуществления межорбитального маневра, например, метод дуговых включений тяги в зоне апогея орбиты или даже метод, характеризующийся дуговыми включениями тяги в зоне апогея и дуговыми включениями тяги в зоне перигея, стартовая масса данного спутника будет иметь примерно тот же порядок (например, в данном случае 2860 кг), но потребная продолжительность маневра выведения на заданную геостационарную орбиту будет увеличена до 4.8 месяца, или возрастет примерно на 30% по сравнению с продолжительностью аналогичного маневра для спутника, выводимого на эту заданную орбиту с использованием способа в соответствии с предлагаемым изобретением.
Таким образом, преимущества способа в соответствии с предлагаемым изобретением является весьма существенным, поскольку оно ведет, в частности, к снижению финансовых затрат, порождаемых вложениями, которые необходимо произвести для постройки данного спутника и его запуска на орбиту до того, как он станет рентабельным. Кроме того, в случае использования способа выведения спутника на заданную орбиту в соответствии с предлагаемым изобретением наземные средства слежения за космическими объектами должны активно работать менее продолжительное время в ходе выполнения упомянутого маневра, то есть требуют меньших затрат на их использование.
Еще одно преимущество, обеспечиваемое при выполнении межорбитального маневра в соответствии со способом по данному изобретению, заключается в значительном сокращении продолжительности пересечения поясов Ван Аллена по сравнению с выполнением подобного межорбитального маневра методом дуговых включений тяги. Факт увеличения высоты апогея промежуточных орбит данного спутника позволяет, в частности, увеличить скорость его движения в окрестности перигея этих орбит, то есть там, где определенно располагаются пояса концентрации протонов и электронов, что приводит к уменьшению продолжительности пересечения поясов Ван Аллена по сравнению со случаем перехода с одной орбиты на другую с использованием метода дугового включения тяги двигателей в зоне апогея, даже с использованием тех же самых двигателей. Кроме того, увеличение высоты перигея является значительно более быстрым, то есть в целом число проходов данного спутника через пояса Ван Аллена также существенно уменьшается.
Еще одно преимущество, связанное с предлагаемым изобретением, состоит в эффективности, тем более высокой, чем орбита отделения данного спутника от носителя имеет большее наклонение по сравнению с конечной номинальной орбитой этого спутника. Действительно, и это является собственным характерным преимуществом, например, супергеосинхронных орбит, увеличение высоты апогея орбиты позволяет корректировать с наилучшей эффективностью погрешность наклонения орбиты, причем эта эффективность тем выше, чем больше высота апогея данной орбиты.
В этом случае также легко убедиться в том, что апогей промежуточных орбит определенно располагается в плоскости конечной заданной орбиты и что полная тяга двигателей коррекции орбиты данного спутника ориентирована в зоне апогея этих промежуточных орбит таким образом, чтобы уменьшать погрешность наклонения, причем упомянутая тяга приложена частично вне плоскости орбиты.
Максимальная эффективность упомянутого выше маневра обеспечивается в том случае, когда ориентация вектора полной тяги не модифицирует никаких других параметров орбиты, кроме высоты ее апогея, высоты перигея и наклонения. Из этого следует, что если после отделения данного спутника от носителя апогей его орбиты располагается в плоскости его конечной заданной орбиты, эта конфигурация сохраняется надолго, и коррекция погрешности наклонения орбиты осуществляется с достаточно большой эффективностью. Внешние воздействия, обычно называемые возмущениями, связанными с влиянием Луны, Солнца или не вполне сферического гравитационного потенциала Земли, могут быть учтены для возможного повышения эффективности упомянутой выше коррекции.
Еще одно преимущество, связанное с предлагаемым изобретением, заключается в возможности полностью разворачивать или раскрывать (или делать это частично) данный спутник перед включением его двигателей коррекции орбиты. Это оказывается возможным вследствие того, что корректирующие двигатели с высоким удельным импульсом обладают относительно малой тягой, и их работа не создает условий, способных повредить достаточно хрупкие конструкции типа солнечных батарей или концентраторов солнечной энергии, антенн и раскрываемых штанг.
В некоторых случаях антенны данного спутника могут быть раскрыты только после окончания функционирования двигателей коррекции орбиты, если эти двигатели расположены таким образом, что они могут загрязнить или повредить активные поверхности этих антенн. И наоборот, раскрытие панелей солнечных батарей даже до начала функционирования двигателей коррекции орбиты данного спутника позволяет затем этим двигателям с высоким удельным импульсом эффективно использовать электрическую энергию, производимую этими солнечными батареями.
Другие характеристики и преимущества предлагаемого изобретения будут лучше поняты из приведенного ниже описания примеров его практической реализации, где даются ссылки на приведенные чертежи.
- Фиг. 1 представляет собой диаграмму, на которой схематически показан процесс выведения спутника на геостационарную орбиту обычным способом с выдачей некоторого импульса тяги в одной точке траектории.
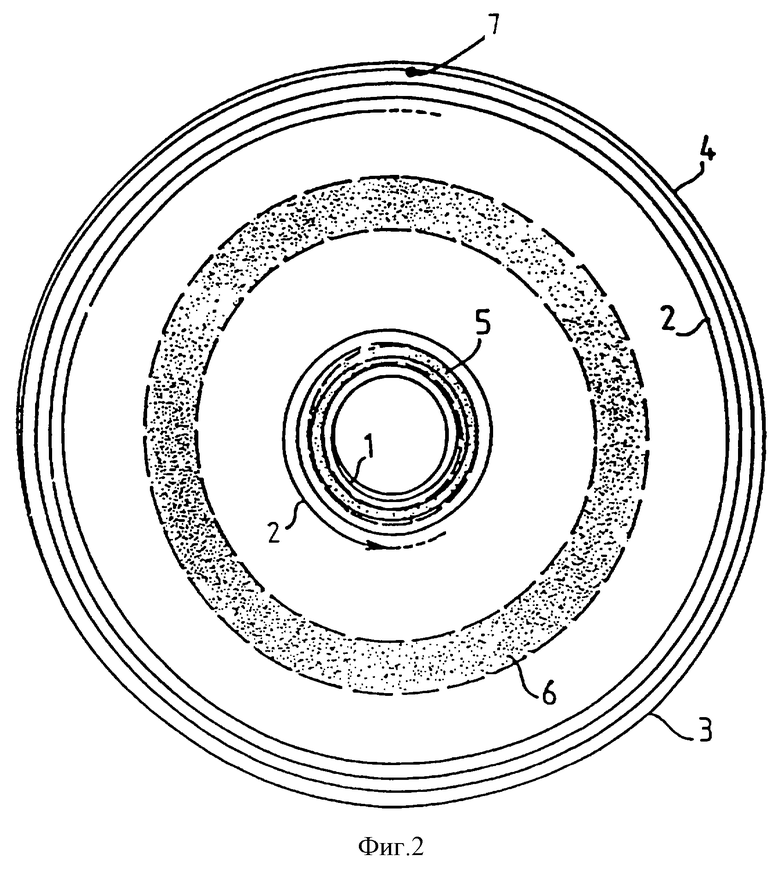
- Фиг. 2 представляет собой диаграмму, на которой схематически показан процесс выведения на заданную орбиту спутника с использованием спиральной траектории и с непрерывным функционированием двигателей коррекции орбиты, начиная с некоторой круговой орбиты отделения этого спутника от носителя.
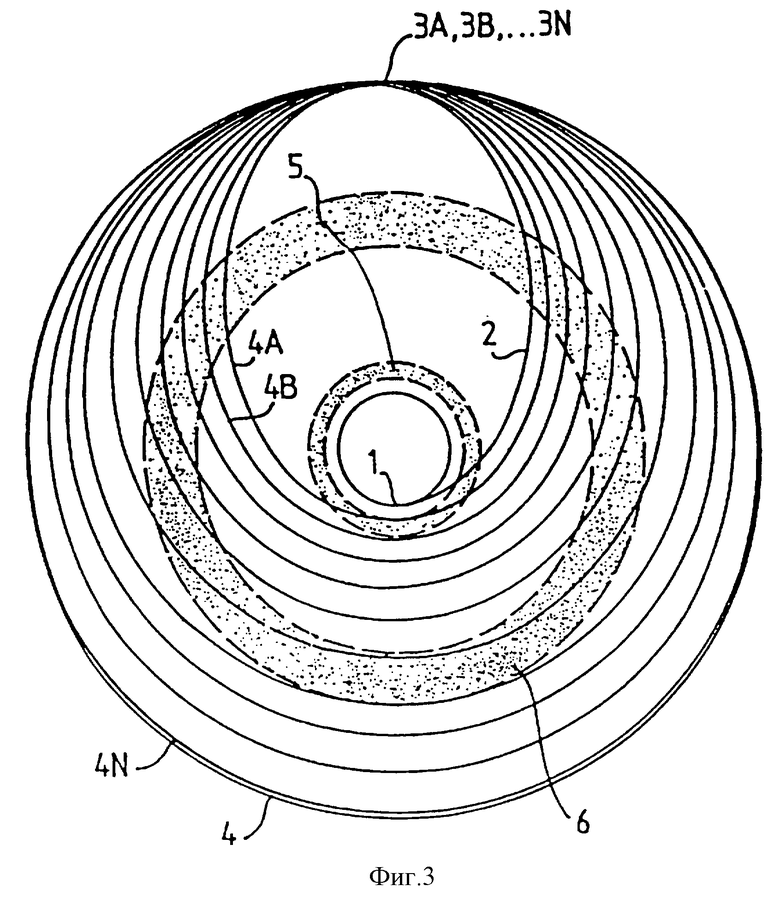
- Фиг. 3 представляет собой диаграмму, на которой схематически показан процесс типа дуговых включений тяги корректирующих двигателей, обеспечивающий выведение спутника на заданную орбиту с прерывистым режимом функционирования двигателей коррекции орбиты с некоторой эллиптической орбиты отделения этого спутника от соответствующего носителя.
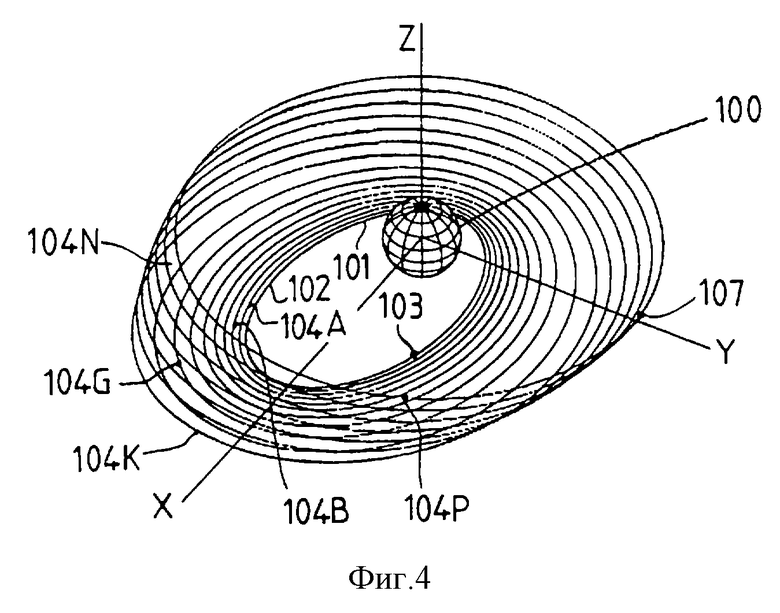
- Фиг.4 представляет собой диаграмму, на которой в перспективе схематически показан процесс выведения спутника на заданную орбиту в соответствии с предлагаемым изобретением, который является маневром спирального типа с непрерывным функционированием двигателей коррекции орбиты, где исходной орбитой является некоторая эллиптическая орбита отделения этого спутника от носителя.
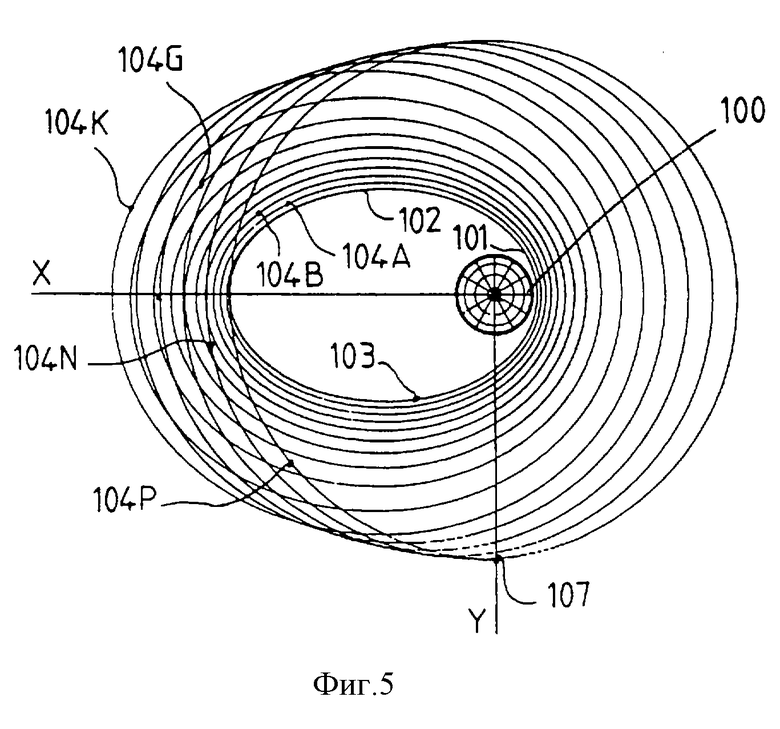
- Фиг. 5 и 6 представляют собой соответственно схематические виды диаграммы, показанной на фиг.4, в плоскости XOY и в плоскости, перпендикулярной упомянутой выше плоскости XOY и содержащей ось Z.
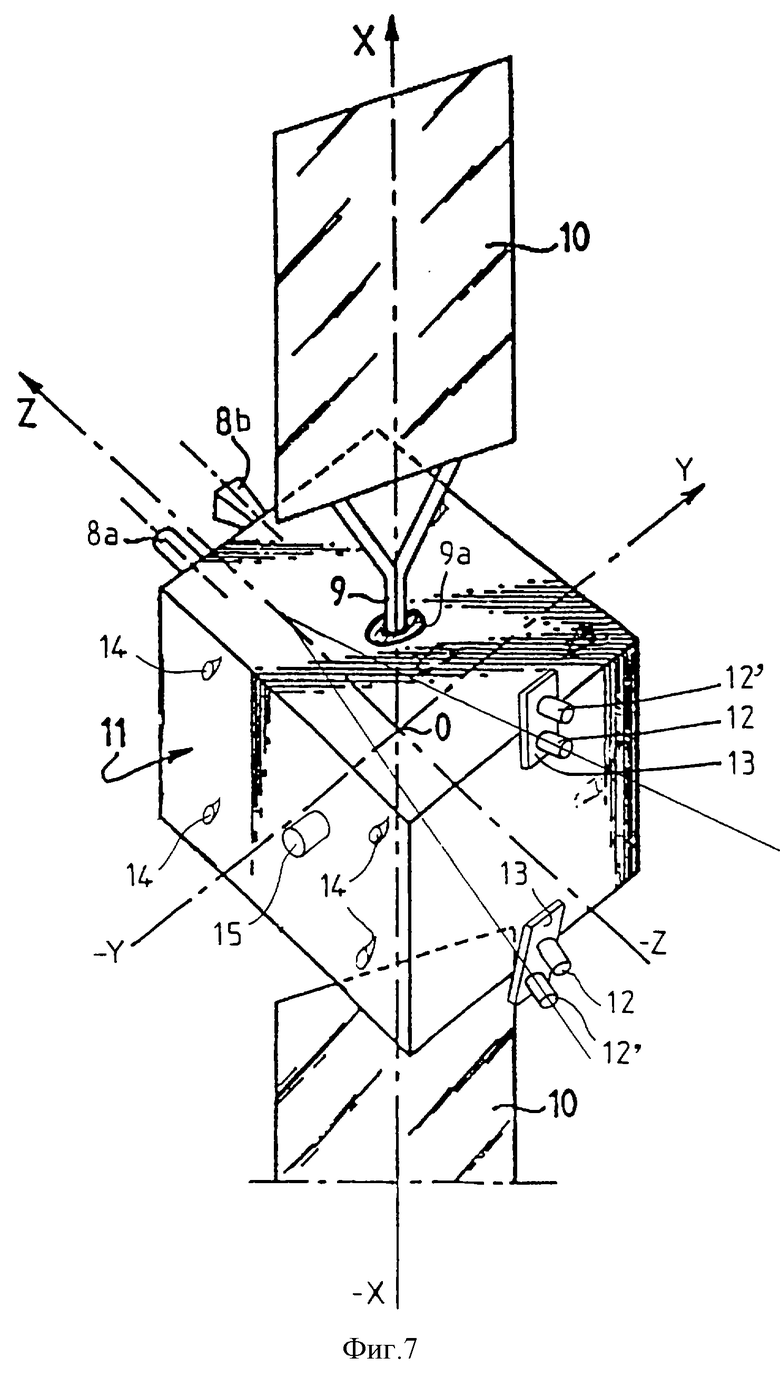
Фиг.7 представляет собой схематический перспективный вид первого примера практической реализации спутника, на котором может быть применено предлагаемое изобретение.
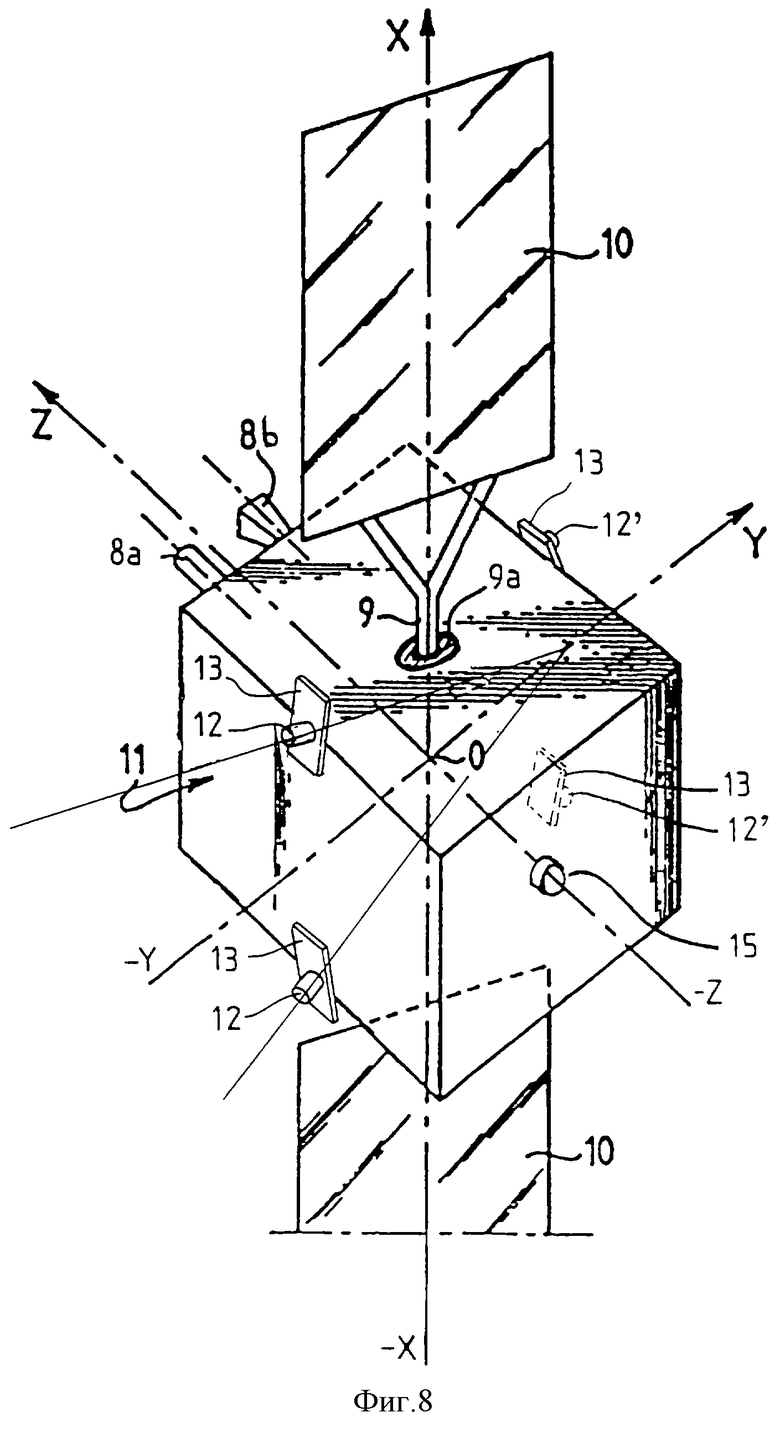
- Фиг.8 представляет собой схематический перспективный вид второго примера практической реализации спутника, на котором может быть применено предлагаемое изобретение.
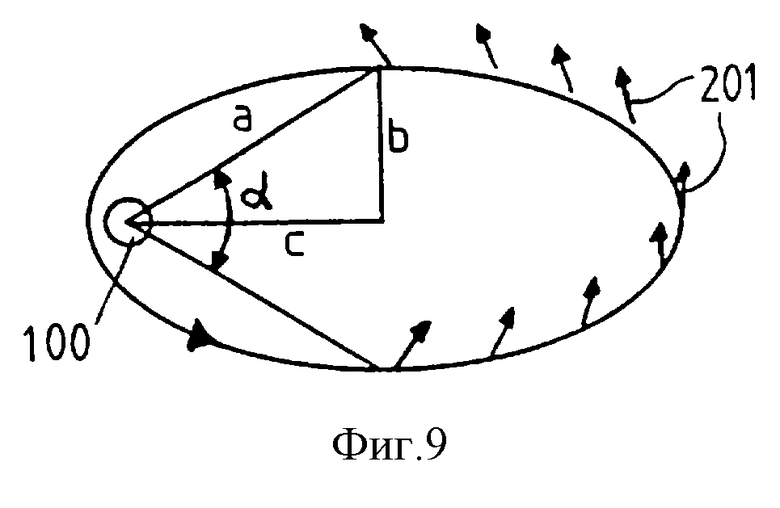
- Фиг. 9 представляет собой диаграмму, на которой схематически показана некоторая эллиптическая орбита и дано определение зоны тяги вокруг полуэллипса, центрированного в апогее данной орбиты.
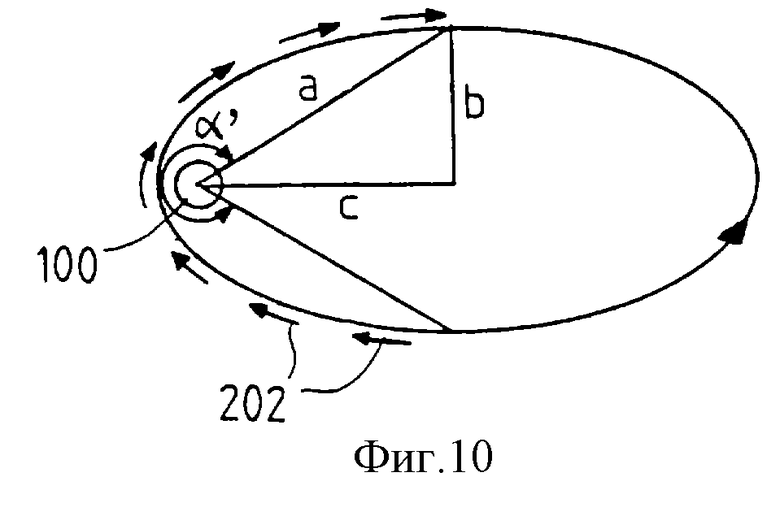
- Фиг.10 представляет собой диаграмму, на которой схематически показана некоторая эллиптическая орбита и дано определение зоны тяги вокруг полуэллипса, центрированного на перигее данной орбиты.
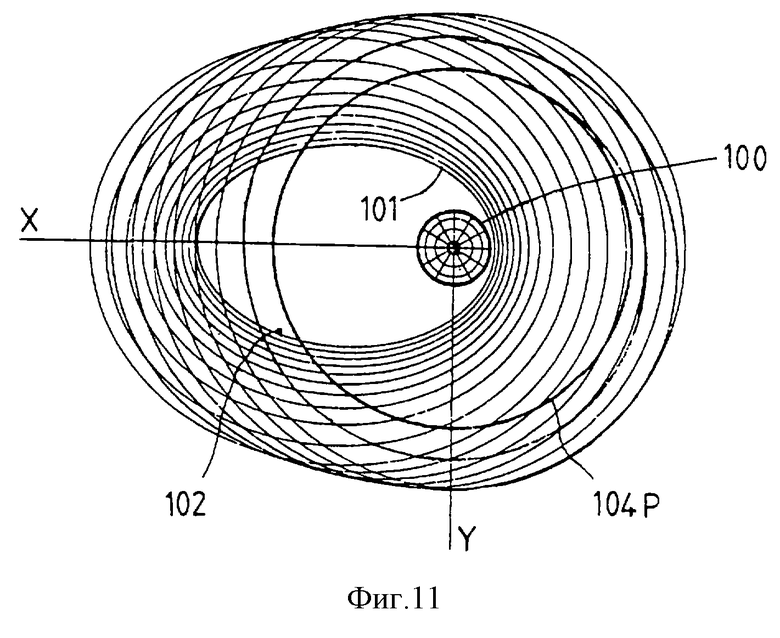
- Фиг.11 представляет собой диаграмму, аналогичную диаграмме, показанной на фиг.5, на которой схематически изображен специфический пример реализации способа в соответствии с предлагаемым изобретением, примененного к случаю вывода спутника на заданную орбиту геостационарного типа в соответствии с так называемым методом "подобия".
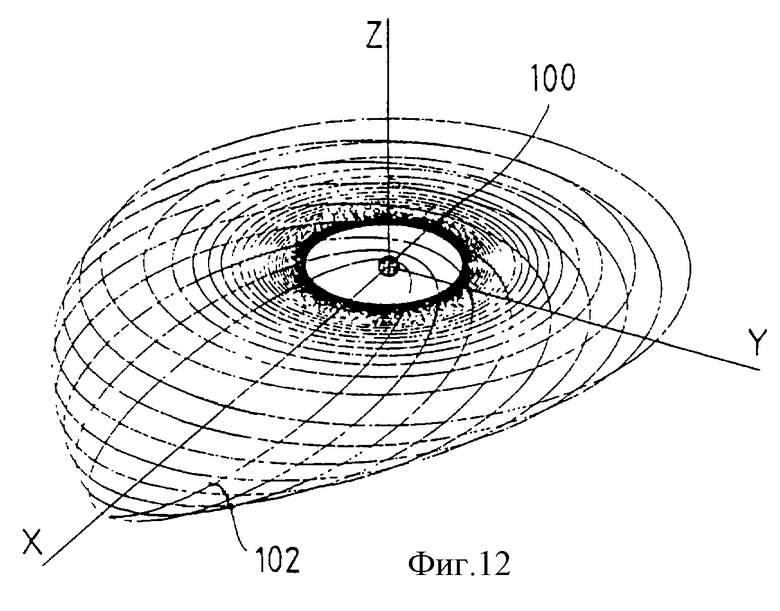
- Фиг.12 представляет собой диаграмму, аналогичную диаграмме, показанной на фиг.4, на которой схематически изображен специфический пример реализации способа в соответствии с предлагаемым изобретением, примененного к выводу спутника на заданную геостационарную орбиту в соответствии с так называемым "альтернативным" методом.
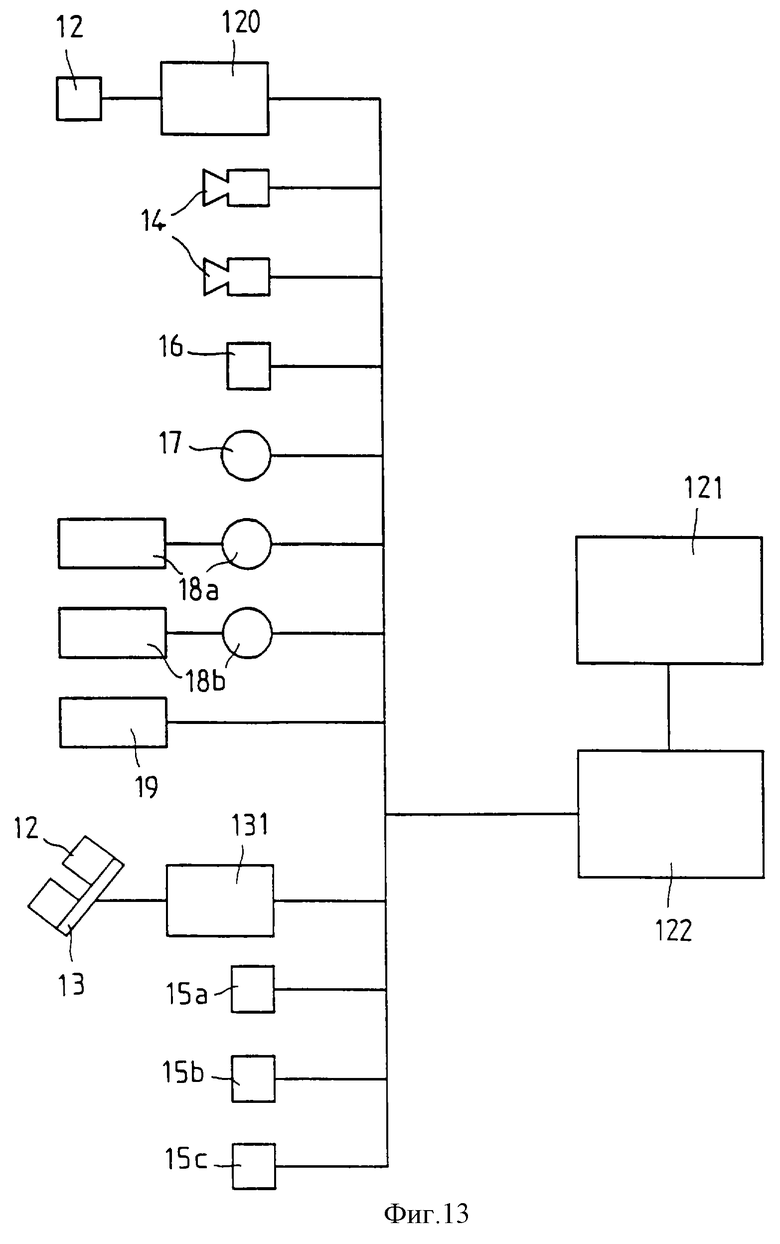
- Фиг.13 представляет собой блок-схему цепей контроля и управления системы в соответствии с предлагаемым изобретением.
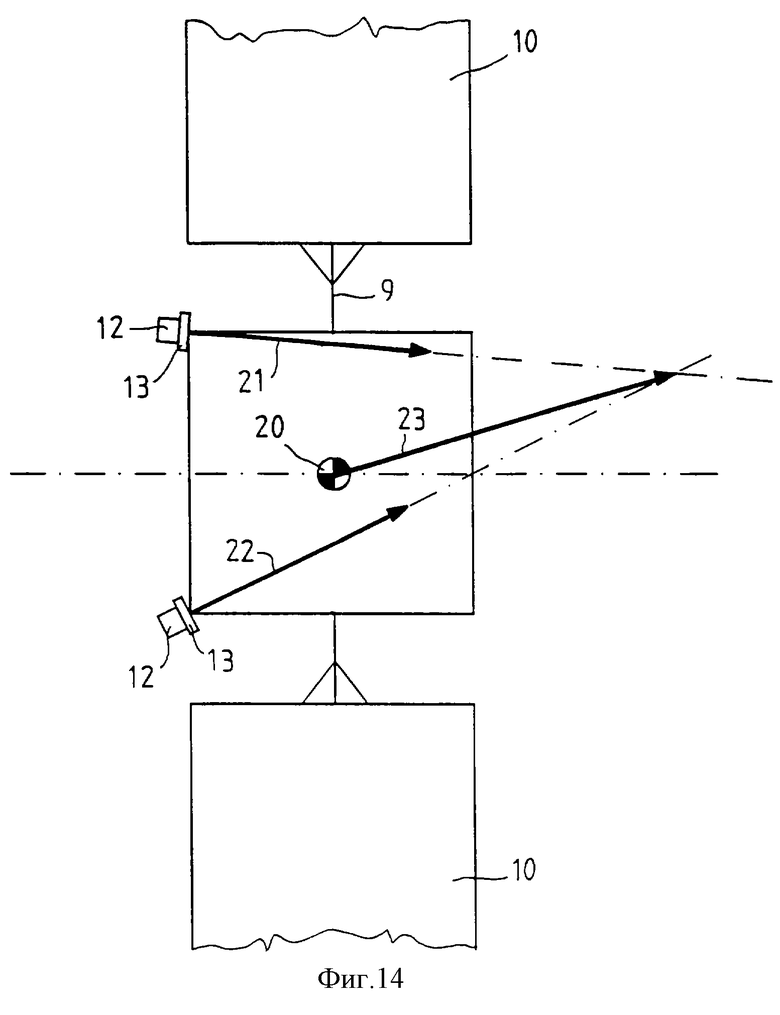
- Фиг.14 представляет собой диаграмму, на которой схематически показана в системе в соответствии с предлагаемым изобретением возможность ориентации вектора полной тяги вне плоскости данной орбиты путем модулирования тяги одного из двигателей коррекции орбиты данного спутника.
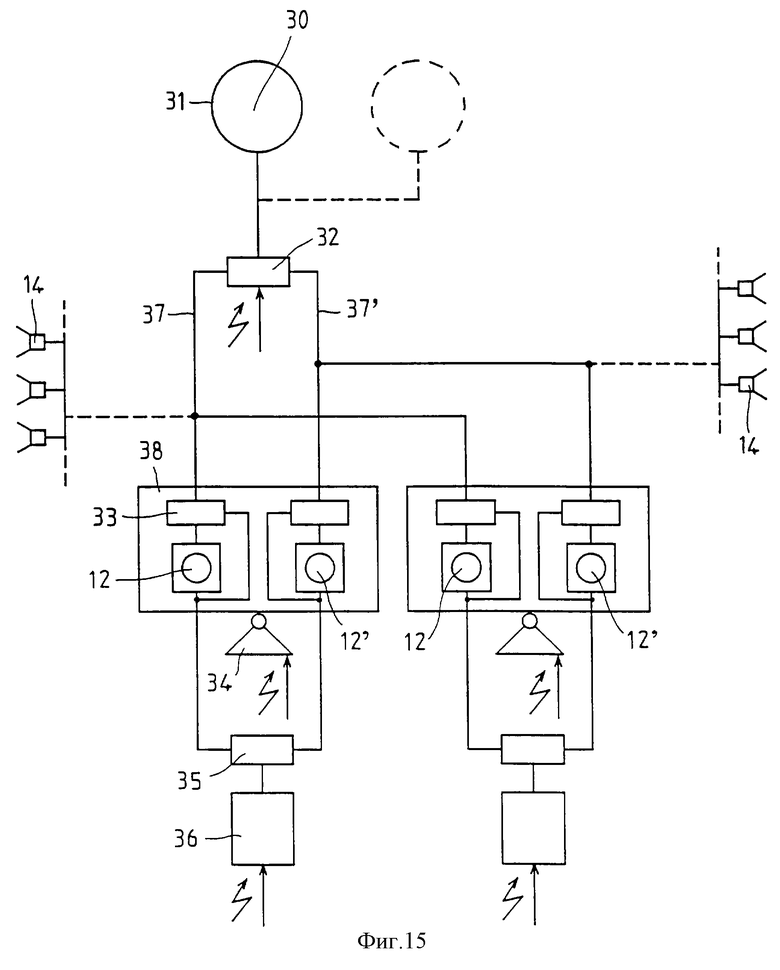
- Фиг.15 представляет собой блок-схему системы в соответствии с предлагаемым изобретением, в которой применяется силовая установка, использующая двигатели с высоким удельным импульсом плазменного типа с замкнутым отклонением электронов.
Прежде всего, со ссылками на фиг.1, 2 и 3 следует напомнить сущность трех классических методов, уже предложенных ранее для размещения спутника на некоторой круговой орбите.
На фиг. 1, которая схематически представляет различные маневры Хомана (Hohmann), можно различить некоторую фазу запуска данного спутника 1, на протяжении которой ракета-носитель выводит данный спутник на некоторую низкую орбиту, после чего осуществляется фаза перехода 2, в ходе которой данный спутник переводится, благодаря увеличению скорости в перигее его орбиты, на некоторую эллиптическую орбиту, апогей которой соответствует конечной требуемой высоте апогея заданной для данного спутника орбиты и где второе увеличение скорости 3 переводит данный спутник на конечную заданную орбиту 4. Зоны, обозначенные позициями 5 и 6, схематически представляют собой пояса интенсивной радиации, известные в области космических исследований под названием поясов Ван Аллена.
На фиг.2 схематически показан подъем орбиты при помощи некоторой спиральной траектории, который осуществляется благодаря очень небольшому, но постоянному увеличению орбитальной скорости. В данном случае можно выделить фазу выведения данного спутника на некоторую низкую круговую орбиту 1, последующую фазу перехода 2, которая образована собственно спиральной траекторией полета данного спутника. Позиция 7 на фиг.2 обозначает место выключения двигателей коррекции орбиты на спиральном участке траектории данного спутника. Позицией 3 обозначено место начала последнего маневра, обеспечивающего выход данного спутника на конечную заданную круговую орбиту 4. Упомянутые выше пояса Ван Аллена, как и на фиг.1, обозначены здесь позициями 5 и 6.
Недостатки методов осуществления межорбитального маневра, проиллюстрированных графически на фиг.1 и 2, уже были изложены выше и не будут здесь формулироваться снова.
На фиг.3 схематически представлен процесс выведения спутника на заданную орбиту при помощи использования способа, называемого дуговыми включениями тяги двигателей коррекции орбиты данного спутника.
После завершения фазы 1 выведения данного спутника на некоторую переходную орбиту этот спутник переводится на некоторую полуэллиптическую орбиту 2, в направлении апогея которой производится включение двигателей коррекции орбиты, которые обеспечивают приращение скорости движения по орбите 3А. После этого данный спутник описывает некоторую вторую эллиптическую орбиту 4А, имеющую несколько большую высоту перигея и весьма незначительно увеличенную высоту апогея. Последующее включение корректирующих двигателей обеспечивает новое приращение орбитальной скорости 3В, производимое в новом апогее орбиты данного спутника, что обеспечивает перемещение данного спутника на новую эллиптическую орбиту 4В, имеющую перигей определенно большей высоты и апогей, лишь немного более высокий, чем апогей предыдущей орбиты. Аналогичные действия осуществляются до тех пор, пока некоторая эллиптическая орбита 4N, апогей которой соответствует высоте апогея конечной заданной орбиты данного спутника, не превратится в заданную круговую орбиту 4, предназначенную для эксплуатации данного спутника.
Здесь, как и на фиг.1 и 2, упомянутые выше пояса Ван Аллена обозначены позициями 5 и 6.
Недостатки способа выведения на заданную орбиту спутника с некоторой переходной орбиты при помощи техники последовательных дуговых участков включения тяги корректирующих двигателей уже были описаны выше и не будут формулироваться здесь снова.
В дальнейшем будет более подробно описан способ выведения некоторого космического аппарата типа искусственного спутника Земли на заданную орбиту в соответствии с предлагаемым изобретением и со ссылками на фиг.4, 5 и 6.
После осуществления фазы выведения 101 данного спутника с Земли 100 в космос при помощи некоторой ракеты-носителя этот спутник отделяется от упомянутого носителя на некоторой эллиптической орбите 102.
Включение корректирующих двигателей для перевода данного спутника на его конечную расчетную орбиту может быть осуществлено либо непосредственно после его вывода на некоторую переходную орбиту отделения от носителя, либо, по желанию пользователя этого спутника, после некоторого числа оборотов по упомянутой эллиптической орбите отделения его от носителя 102, когда этот спутник окажется, например, в точке 103.
В тот момент, когда будет принято решение о начале маневра перехода спутника, находящегося в точке 103, на другую орбиту, производится включение совокупности двигателей коррекции орбиты этого спутника с высоким удельным импульсом, причем количество этих двигателей может быть различным и, в частности, это может быть всего один двигатель.
Эти двигатели с высоким удельным импульсом включаются в непрерывный режим работы и специальная ориентация вектора их полной тяги заставляет данный спутник описывать в пространстве спиральную траекторию 104А, 104В,... , которая характеризуется совокупностью следующих друг за другом промежуточных орбит, высота апогея которых увеличивается быстрее, чем высота их перигея.
После того как высота апогея очередной промежуточной орбиты окажется уже достаточной, например, в точке 104G, двигатели коррекции орбиты продолжают оставаться во включенном состоянии и только закон ориентации вектора полной тяги изменяется таким образом, чтобы обеспечить возможность осуществления также и некоторой модификации наклонения орбиты.
Когда данный спутник описывает участок 104К своей спиральной траектории, его двигатели продолжают работать и только закон ориентации вектора полной тяги изменяется таким образом, чтобы описываемая спутником спираль представляла на каждом последующем обороте, то есть для каждой последующей промежуточной орбиты, некоторое уменьшение высоты апогея и некоторое увеличение высоты перигея.
После того как требуемое изменение наклонения орбиты будет обеспечено, например, в точке 104N, двигатели данного спутника продолжают работать, и только закон ориентации вектора их полной тяги изменяется таким образом, чтобы расположить этот вектор тяги в плоскости орбиты, сохраняя при этом ориентацию, обеспечивающую уменьшение высоты апогея и увеличение высоты перигея каждой следующей промежуточной орбиты.
После этого спиральная траектория движения данного спутника продолжается по промежуточным орбитам от 104N до 104Р. Выключение двигателей коррекции орбиты данного спутника производится, например, в точке 107, после того как высота апогея и высота перигея очередной промежточной орбиты окажутся равными или приблизительно равными высотам апогея и перигея конечной заданной орбиты данного спутника. Как можно видеть из примера, описанного выше, в определенных случаях может оказаться предпочтительным вариант, в соответствии с которым изменение в нужную сторону величины наклонения орбиты не будет осуществляться сразу после включения одного или нескольких двигателей коррекции орбиты данного спутника.
Действительно, в начале функционирования этих двигателей в непрерывном режиме вполне уместно прежде всего обеспечить возможность быстрого увеличения высоты перигея промежуточной орбиты с тем, чтобы минимизировать продолжительность пересечения упомянутых поясов Ван Аллена. Однако эта продолжительность может увеличиться в том случае, если на этой стадии межорбитального маневра дополнительно осуществлять изменение наклонения орбиты, что приведет соответственно к уменьшению составляющей полной тяги, обеспечивающей увеличение высоты перигея орбиты.
Аналогичным образом достижение требуемого наклонения орбиты может быть завершено в точке 104N, даже до того, как будет достигнута сама эта заданная орбита в отношении высот ее апогея и перигея, для того, чтобы оптимизировать ее общие характеристики, и с учетом того, что чем больше высота апогея, тем выше эффективность изменения наклонения данной орбиты.
Различные фазы функционирования двигателей коррекции орбиты данного спутника на спиральной траектории его движения могут учитывать условия его окончательного позиционирования в заданной точке на заданной геостационарной орбите или в ее ближайшей окрестности. При следовании спутника по спиральной траектории существует достаточно большой маневр для того, чтобы, возможно, ценой некоторого ухудшения общих характеристик, достичь в конце функционирования двигателей коррекции орбиты данного спутника любой точки заданной геостационарной орбиты.
Здесь следует отметить, что способ в соответствии с предлагаемым изобретением обладает специфическим преимуществом, которое состоит в возможности определить межорбитальный маневр, в процессе осуществления которого только одного включения двигателей коррекции орбиты данного спутника может быть достаточно для осуществления его перехода с некоторой исходной орбиты отделения от носителя на конечную заданную орбиту. Естественно, что при этом всегда имеется возможность мгновенно выключить один или несколько двигателей по каманде из Центра управления полетом, если для этого есть причины, не связанные непосредственно с маневром выведения данного спутника на заданную орбиту. Такими причинами могут быть, например, необходимость выполнения операций технического обслуживания двигателей или спутника в целом, а также требования измерения параметров орбиты, получения телеметрической информации или выполнения команд дистанционного управления.
В то же время, изменения наклонения орбиты в некоторых случаях применения способа межорбитального маневра в соответствии с предлагаемым изобретением могут быть осуществлены в самом начале этапа работы двигателей коррекции орбиты данного спутника или перед самым концом их работы, если по тем или иным причинам желательно, например, ускорить позиционирование спутника в заключительной стадии на геостационарную орбиту или исключить пересечение геостационарной орбиты с нулевым наклонением.
Как известно, апогей и перигей орбиты определяются как максимальное и минимальное расстояние от Земли, достигаемые данным космическим аппаратом в процессе его обращения по этой орбите. Обычно орбита, описываемая искусственным спутником Земли, имеет форму, близкую к правильному эллипсу, даже в том случае, когда двигатели коррекции орбиты данного спутника с высоким удельным импульсом непрерывно работают, хотя и развивают относительно небольшую тягу. Именно поэтому можно считать, что апогей и перигей орбиты, о которых идет речь, могут быть апогеем и перигеем оскуляторного эллипса или эллипса, соприкасающегося со средней орбитальной траекторией.
Для того чтобы обеспечить требуемые эффекты в процессе осуществления соответствующих фаз функционирования двигателей на участках траектории от 104К до 104N, можно на протяжении полуэллипса, центрированного в апогее, ориентировать вектор тяги двигателей данного спутника в местной горизонтальной плоскости, как это схематически показано на фиг.9, и на протяжении полуэллипса, центрированного в перигее, можно ориентировать упомянутый вектор тяги двигателей в некоторой плоскости, перпендикулярной плоскости орбиты и касательной к орбите, в направлении, противоположном направлению орбитальной скорости данного спутника, как это схематически показано на фиг.10.
На фиг.9 и 10 схематически представлены соответственно угол α дуги ориентации вектора тяги в апогее данной орбиты и угол α′ дуги ориентации вектора тяги в перигее этой орбиты. На этих фиг.9 и 10 схематически представлены следующие параметры, относящиеся к данному эллипсу:
а=половина большой оси;
b=половина малой оси;
с=расстояние от фокуса до центра данного эллипса.
При этом следует напомнить, что величина эксцентриситета данного эллипса выражается отношением с/а.
На фиг.11 схематически представлен маневр выведения спутника на заданную орбиту в соответствии с так называемым методом "подобия". Этот метод дает достаточно существенные преимущества в отношении продолжительности пересечения упомянутых выше поясов Ван Аллена. В данном случае исходная орбита отделения от носителя представляет собой некоторую эллиптическую орбиту с высотой перигея порядка 620 км и с высотой апогея порядка 71000 км. При этом непрерывная работа двигателей коррекции орбиты с высоким удельным импульсом начинается в окрестности начала так называемого полуэллипса, центрированного в апогее данной орбиты.
В этом случае вектор полной тяги двигателей коррекции орбиты данного спутника ориентирован в местной горизонтальной плоскости таким образом, чтобы имело место как увеличение высоты перигея каждой последующей промежуточной орбиты, так и увеличение высоты ее апогея. Затем, начиная с высоты перигея этой промежуточной орбиты, превышающей 20000 км (эта высота перигея зависит, в частности, от текущей активности упомянутых поясов Ван Аллена, и может также быть принята равной, например, 8000 км в некоторых случаях применения способа в соответствии с предлагаемым изобретением), ориентация вектора полной тяги двигателей данного спутника изменяется таким образом, чтобы стать инерциальной (то есть касательной к вектору орбитальной скорости данного спутника в апогее его орбиты), следствием чего является увеличение высоты перигея данной орбиты и уменьшение высоты ее апогея, а затем, после того, как исчезнет эксцентриситет данной орбиты, ориентация вектора полной тяги двигателей коррекции орбиты данного спутника изменяется таким образом, чтобы этот вектор оказался касательным к данной орбите и противоположным по направлению относительно вектора орбитальной скорости, следствием чего незамедлительно оказывается уменьшение высоты перигея соответствующей промежуточной орбиты и уменьшение высоты ее апогея.
Таким образом, в результате упомянутых выше особенностей межорбитального маневра в соответствии с предлагаемым изобретением в конечном счете высоты апогея и перигея очередной промежуточной орбиты совпадают с высотами апогея и перигея заданной орбиты эксплуатации данного спутника, то есть с соответствующими параметрами заданной геостационарной орбиты.
В данном случае можно отметить, что количество промежуточных орбит, пересекающих пояса Ван Аллена, существенно уменьшено по сравнению со случаем межорбитального маневра, схематически представленного на фиг.4.
На фиг. 12 схематически представлен вывод спутника на заданную орбиту в соответствии с так называемым методом "чередования". Этот метод обеспечивает существенное преимущество в части продолжительности пересечения поясов Ван Аллена. В данном случае исходная орбита представляет собой эллиптическую орбиту с высотой перигея 620 км и высотой апогея 330000 км. Режим непрерывной работы двигателей коррекции орбиты с высоким удельным импульсом начинается в окрестности начала полуэллипса, центрированного в апогее. Вектор полной тяги двигателей ориентируется таким образом, чтобы быть инерциальным (касательным к вектору орбитальной скорости в апогее), следствием чего является увеличение высоты перигея и уменьшение высоты апогея.
Затем, когда исчезнет эксцентриситет очередной промежуточной орбиты, ориентация вектора полной тяги изменяется, и он располагается в местной горизонтальной плоскости в направлении, противоположном направлению вектора скорости, следствием чего является уменьшение высоты перигея и уменьшение высоты апогея таким образом, чтобы в конечном счете высоты апогея и перигея промежуточной орбиты совпали с высотами апогея и перигея конечной заданной геостационарной орбиты. Здесь следует отметить, что в данном случае число промежуточных орбит, пересекающих пояса Ван Аллена, значительно уменьшено по сравнению со случаем, схематически представленным на фиг.4, и уменьшено даже по сравнению со случаем, схематически представленным на фиг.11.
Обратимся теперь к фиг.7 и 8, на которых схематически показаны два варианта реализации спутника 11, к которому может быть применено данное изобретение. Этот космический аппарат 11 оборудован двигателями 12 с высоким удельным импульсом, установленными на платформах или основаниях 13, по меньшей мере часть из которых являются ориентируемыми в пространстве. Двигатели 12' предназначены для обеспечения резервирования в процессе выполнения маневра выведения спутника на заданную орбиту. Другие вспомогательные двигатели 14, использующие то же самое рабочее тело, что и двигатели 12 и 12', также могут быть установлены на корпусе спутника 11.
Данный спутник оборудован панелями солнечных батарей 10, каждая из которых при помощи конструкции 9 связана с механизмом привода солнечного генератора (MEGS), обозначенным позицией 9а. На фиг.7 и 8 этот спутник представлен в положении, когда его ось OZ ориентирована в направлении Земли. Эта ось OZ нацеливается на центр Земли при помощи инфракрасных датчиков горизонта 8а или нацеливается на некоторый радиомаяк при помощи радиочастотного детектора 8b. Вспомогательные датчики земного горизонта 15 также могут быть установлены на других поверхностях корпуса спутника 11.
Упомянутые двигатели 12 и 12' служат как для контроля орбиты и углового положения данного спутника в процессе его эксплуатации на заданной орбите, так и для выполнения маневров по изменению орбиты.
Система выведения на заданную орбиту, установленная на данном спутнике, содержит некоторое устройство управления включением одного или нескольких двигателей в непрерывный режим работы после отделения этого спутника от носителя и вплоть до того момента, когда этот спутник достигнет своей конечной заданной орбиты. Кроме того, эта система содержит устройство управления ориентацией вектора тяги двигателей, действующее либо на уровне ориентируемых в пространстве опорных платформ двигателей, либо на уровне других средств ориентации, которыми располагает данный спутник (кинематические колеса или маховики, например). Предусмотрены также специальные средства, предназначенные для формирования некоторой команды ориентации.
Поскольку орбита отделения спутника от носителя обычно представляет собой эллиптическую орбиту с сидерическим периодом, отличающимся, например, меньшим, от сидерического периода конечной заданной орбиты этого спутника, то:
- на начальной стадии маневра перехода с исходной орбиты на конечную заданную орбиту на каждом последующем витке эффект функционирования двигателей 12 и их ориентации в пространстве приводит к увеличению высоты апогея орбиты и к несколько меньшему увеличению высоты перигея этой орбиты;
- на заключительной стадии этого межорбитального маневра на каждом последующем витке эффект функционирования двигателей 12 и их ориентации в пространстве приводит к уменьшению высоты апогея орбиты и к увеличению высоты перигея этой орбиты.
Упомянутые средства, предусмотренные для формирования команды ориентации, могут быть также адаптированы для использования, например, метода чередования, описанного выше.
Различные методы ориентации вектора полной тяги могут быть использованы упомянутыми средствами, формирующими команды ориентации и схематически представленными на фиг.13.
Для того чтобы ориентировать вектор полной тяги в местной горизонтальной плоскости, система координат ориентации может быть выдана инфракрасным датчиком земного горизонта 15а, который имеет возможность приспосабливаться к переменному расстоянию между данным спутником и Землей (например, сканирующий датчик или датчик с матрицей CCD). Контроль по третьей оси (ось рыскания) может быть обеспечен в общем случае путем использования солнечного или звездного датчика 18а, 18b, 19. Точность наведения или прицеливания порядка ±2o оказывается вполне достаточной для решения поставленной задачи.
Для того чтобы ориентировать затем вектор полной тяги касательно к вектору орбитальной скорости и в противоположной по отношению к нему направлении, данный спутник осуществляет поворот на угол примерно 180o вокруг оси Север-Юг с тем, чтобы изменить на противоположное направление вектора полной тяги. В этом случае необходимы вспомогательные или дополнительные инфракрасные датчики земного горизонта 15b, 15с, располагающиеся на двух противоположных сторонах данного спутника (то есть на сторонах, перпендикулярных оси Восток-Запад). Упомянутый переворот спутника в предпочтительном варианте обеспечивается путем создания вращающего момента при помощи кинетического колеса или маховика 17, располагающегося вдоль оси Север-Юг, и амплитуда этого поворота будет измеряться либо интегрирующим гироскопом 16, либо солнечными датчиками 18а, 18b.
Для того чтобы ориентировать вектор полной тяги вдоль инерциального направления, солнечный датчик 18а, 18b или 18с выдает, например, углы пространственного положения данного спутника, которые изменяются строго на 1o в сутки по отношению к звездам. Бортовой вычислитель 121 расчитывает угол между направлением на Солнце и требуемым направлением вектора полной тяги двигателей и на основе этих расчетов выдает команду управления для поворота данного спутника в нужном направлении (путем воздействия на маховик 17 при помощи системы управления угловым положением 122) вплоть до достижения требуемого угла.
Если упомянутый солнечный датчик располагается на панели солнечной батареи 10 (датчики 18а, 18b), бортовой вычислитель 121 будет управлять углом между панелями солнечных батарей 10 и корпусом спутника 11 путем воздействия на механизм привода солнечного генератора (MEGS), тогда как система 122 управления угловым положением и орбитой (AOCS) данного спутника будет задействована для нацеливания панелей солнечных батарей на Солнце.
Сознательное изменение направления ориентации подвижных платформ 13, служащих опорами для двигателей с высоким удельным импульсом 12, 12', также позволяет создать вращающий момент управления угловым положением данного спутника.
На фиг. 13 схематически представлена система двигателей с высоким удельным импульсом 12, включение которых обеспечивается контуром управления 120, серия небольших вспомогательных и не обязательно присутствующих двигателей 14, использующих для своего функционирования то же самое рабочее тело (например, ксенон), что и система двигателей 12, содержащая пирометр 16, массивные маховики 17, солнечный датчик 18а управления механизмом привода солнечного генератора с северной стороны, солнечный датчик 18b управления механизмом привода солнечного генератора с южной стороны, совокупность солнечных датчиков 19, жестко связанных с корпусом спутника 11, опорные панели 13 для двигателей с высоким удельным импульсом 12, контур 131 управления ориентацией этих панелей 13, инфракрасный датчик земного горизонта 15а, бортовой вычислитель 121 и интерфейсы и приводные механизмы 122, образующие систему управления угловым положением и орбитой данного спутника.
В качестве возможного дополнения к перечисленной выше структуре на фиг. 13 представлены датчик земного горизонта восточного направления 15b и датчик земного горизонта западного направления 15с.
Для того чтобы ориентировать вектор полной тяги двигателей данного спутника вне плоскости его орбиты (что необходимо в том случае, когда требуется изменить наклонение последовательно описываемых промежуточных орбит), можно действовать таким образом, чтобы данный спутник целиком поворачивался вокруг, например, своей нормальной оси (ось OZ на фиг.8).
Если, как это показано на фиг.7 и 8, несколько, например два, двигателей с высоким удельным импульсом установлены на данном спутнике, можно также обеспечить соответствующую ориентацию вектора полной тяги с некоторой составляющей, располагающейся вне орбитальной плоскости, ориентируя соответствующим образом подвижные опорные основания 13 и модулируя интенсивность или величину тяги одного из двух двигателей 12 таким образом, чтобы, несмотря на наличие составляющей вне орбитальной плоскости, вектор полной тяги проходил через центр масс данного космического аппарата. Эта специфическая возможность схематически представлена на фиг.14. Для получения вектора полной тяги (вектор 23), проходящего через центр масс данного космического аппарата 20 и имеющего некоторую составляющую вне орбитальной плоскости, подвижные опорные основания двигателей 13 ориентируются различным образом для двигателей 12, располагающихся на северной или на южной стороне. Тяга двигателя 12, расположенного на северной стороне (вектор 21), регулируется таким образом, чтобы вектор полной тяги 23, который представляет собой сумму (векторную) векторов тяги 21 и 22, проходил через центр масс 20 данного космического аппарата.
На фиг.15 представлена блок-схема двигательной системы космического аппарата, позволяющая практически реализовать способ выведения на орбиту в соответствии с предлагаемым изобретением этого космического аппарата.
Один или несколько резервуаров 31, предназначенных для хранения некоторого продукта 30, такого, например, как инертный газ ксенон, питают некоторое распределительное устройство 32. Это распределительное устройство 32 может содержать систему регулирования давления или расхода данного продукта и систему клапанов и датчиков, не показанную на приведенных чертежах. Упомянутое распределительное устройство обеспечивает распределение по номинальным каналам 37 или по резервным каналам 37' продукта 30 через устройства контроля расхода 33, которые обеспечивают возможность питания двигателей с высоким удельным импульсом 12 и 12'. Имеющиеся в случае необходимости вспомогательные двигатели 14, использующие для работы тот же самый продукт или рабочее тело 30, запитываются этим рабочим телом через каналы 37 и 37'.
Двигатели 12 и 12' с высоким удельным импульсом запитываются электрической мощностью посредством некоторого электрического распределительного устройства 35, которое может содержать совокупность реле на основе модуля электрического согласования 36, связанного непосредственно с источником электрической мощности данного космического аппарата и с его шиной контроля и управления.
Каждое подвижное основание 38, служащее опорой для двигателей 12 и 12' с высоким удельным импульсом, является ориентируемым по отношению к корпусу данного космического аппарата при помощи действия устройства управления ориентацией 34.
Система осуществления межорбитального маневра космического аппарата в соответствии с предлагаемым изобретением применяется главным образом в случае перехода этого космического аппарата с некоторой исходной эллиптической орбиты отделения от носителя типа орбиты GTO на некоторую конечную заданную круговую орбиту типа GEO. Однако может быть также выгодным переходить с некоторой исходной эллиптической орбиты отделения от носителя GTO на некоторую другую эллиптическую орбиту, имеющую другое наклонение.
Изобретение относится к космической технике и может быть использовано при доставке искусственного спутника на геостационарную орбиту. Предлагаемый способ включает отделение космического аппарата (КА) от носителя на исходной эллиптической орбите и его вывод на многовитковую спиральную траекторию перелета к заданной орбите. Для реализации этой траектории используют совокупность (электроракетных) двигателей с высоким удельным импульсом, работающих в непрерывном режиме. При этом во время первой фазы перелета на каждом витке обеспечивают увеличение высоты перигея орбиты, а также эволюцию либо в сторону увеличения, либо в сторону уменьшения высоты апогея орбиты и уменьшение погрешности наклонения текущей (оскулирующей) орбиты. Во время второй фазы перелета обеспечивают уменьшение высоты апогея и аналогичную эволюцию высоты перигея, а также уменьшение указанной погрешности наклонения. Перелет завершают в момент совпадения параметров промежуточной орбиты с параметрами заданной конечной орбиты. Предлагаемая система содержит необходимые средства управления ориентацией векторов тяги двигателей (плазменных, электродуговых или ионных) в соответствующих орбитальных плоскостях. Изобретение направлено на сокращение длительности межорбитального перелета, обеспечение его эффективности, безопасности и достаточной простоты практической реализации. 2 с. и 16 з.п. ф-лы, 15 ил.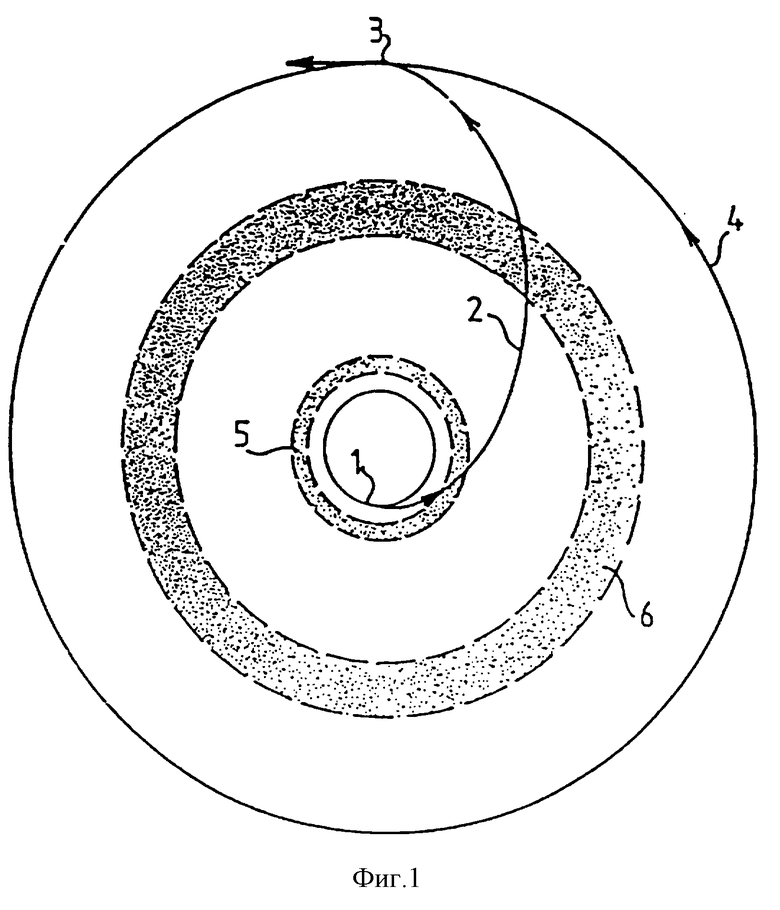
| Пакет пластинчатого теплообменного аппарата | 1977 |
|
SU673833A1 |
| СТАНОК ДЛЯ ИЗГОТОВЛЕНИЯ БЕТОННЫХ КАМНЕЙ | 1935 |
|
SU47211A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОДВИЖНОСТИ И СПОСОБ ОЦЕНКИ ПОДВИЖНОСТИ ПАРНОГО ГЛАЗА, ОПОРНО-ДВИГАТЕЛЬНОЙ КУЛЬТИ И ГЛАЗНОГО КОСМЕТИЧЕСКОГО ПРОТЕЗА | 2014 |
|
RU2569162C1 |
| Способ доводки гравитационных вольфрамовых концентратов | 1943 |
|
SU64917A1 |
| ЛЕВАНТОВСКИЙ В.И | |||
| Механика космического полета в элементарном изложении | |||
| - М.: Наука, 1970, с.127-134 | |||
| ГРИЛИХЕС В.А | |||
| и др | |||
| Солнечная энергия и космические полеты | |||
| - М.: Наука, 1984, с.169-171. | |||

