Изобретение относится к космической технике, в частности к выведению космического аппарата на геостационарную орбиту.
Известен способ выведения космического аппарата на заданную орбиту с использованием двигателей малой тяги, сущность которого раскрыта в патенте «Способ и система выведения на заданную орбиту космического аппарата с использованием двигателей, обладающих большим удельным импульсом» (RU 2212363 С2, B64G 1/00). Способ заключается в выведении космического аппарата на заданную орбиту с отличной от нее исходной эллиптической орбиты, включает отделение космического аппарата от ракеты-носителя на исходной орбите и межорбитальный перелет, состоящий из двух фаз, по траектории, образованной множеством промежуточных орбит, при включении в работу совокупности двигателей с высоким удельным импульсом, при этом во время первой фазы межорбитального перелета в начале режима непрерывной работы двигателей на каждом последующем витке осуществляют уменьшение высоты апогея и увеличение высоты перигея текущей промежуточной орбиты, затем во время второй фазы межорбитального перелета в конце режима непрерывной работы двигателей, когда эксцентриситет текущей промежуточной орбиты космического аппарата близок к эксцентриситету заданной конечной орбиты космического аппарата, на каждом последующим витке осуществляют уменьшение высоты апогея и уменьшение высоты перигея текущей промежуточной орбиты.
Недостатком этого способа является необходимость непрерывного изменения ориентации космического аппарата в процессе межорбитального перелета, связанная с предлагаемой программой полета, что влечет за собой усложнение программного обеспечения системы ориентации и стабилизации, а также программного обеспечения командно-измерительной системы, связанное с необходимостью перманентного контроля углового положения космического аппарата в пространстве. Кроме того, в связи с тем, что на траекториях межорбитального перелета существуют участки, на которых генерация тяги в предлагаемом направлении малоэффективна, происходит неэффективное расходование топлива для двигателей с большим удельным импульсом. А также вследствие постоянной работы исполнительных органов системы ориентации и стабилизации в режиме переориентации космического аппарата происходит увеличение расхода топлива для двигателей ориентации и связанное с этим увеличение массы топлива для двигателей ориентации.
Наиболее близким по технической сущности к предлагаемому способу выведения космического аппарата на геостационарную орбиту является «Способ выведения космического аппарата на заданную орбиту с использованием двигателей малой тяги» (патент RU 2208557 С1, B64G 1/00), сущность которого состоит в выведении космического аппарата с помощью средств выведения с двигателем большой тяги на начальную эллиптическую орбиту с высотой перигея ниже высоты перигея заданной орбиты, высотой апогея выше высоты апогея заданной орбиты и величиной наклонения, также отличной от величины наклонения заданной орбиты, с последующим довыведением космического аппарата на целевую орбиту с помощью двигателей малой тяги, при этом траектория довыведения включает в себя участки торможения в области перигея и участки разгона с изменением наклонения орбиты в области апогея, причем величины угловых секторов работы двигателей малой тяги в области апогея и перигея и максимальную величину угла отклонения вектора тяги по рысканью выбирают постоянными для всего этапа довыведения. Данный способ выведения космического аппарата на геостационарную орбиту был взят за прототип.
Недостатком этого способа является периодическая необходимость изменения ориентации космического аппарата на участке разгона и необходимость возврата первоначальной ориентации на участке торможения, что усложняет программное обеспечение системы ориентации и стабилизации, а также увеличивает необходимый запас рабочего тела для двигателей ориентации, связанный с большим количеством маневров переориентации космического аппарата.
Задачей изобретения является сокращение срока ввода космического аппарата в эксплуатацию за счет совмещения довыведения космического аппарата на геостационарную орбиту с приведением его в рабочую точку на геостационарной орбите, с одновременной минимизацией затрат топлива для двигателей ориентации и двигателей, используемых для довыведения космического аппарата.
Поставленная задача решается за счет способа выведения космического аппарата на геостационарную орбиту, заключающегося в том, что космический аппарат выводится с помощью средств выведения с двигателем большой тяги на переходную орбиту с нулевым наклонением, с перигеем ниже высоты геостационарной орбиты, а апогеем выше высоты геостационарной орбиты, с которой осуществляется довыведение космического аппарата на геостационарную орбиту с помощью двигателей малой тяги, непрерывно работающих на всем протяжении переходной орбиты, за исключением двух симметрично расположенных участков переходной орбиты, на которых работа двигателей малой тяги малоэффективна, отличающегося тем, что в процессе довыведения ориентация космического аппарата в инерциальном пространстве остается неизменной на всем протяжении этапа довыведения, причем одновременно с изменением эксцентриситета орбиты изменяют скорость дрейфа космического аппарата в требуемом направлении и совмещают довыведение по эксцентриситету с приведением по долготе, при этом в качестве двигателя малой тяги используют штатный электрореактивный двигатель коррекции долготы космического аппарата, а для обеспечения требуемого энергобаланса космического аппарата нормаль панелей солнечных батарей предустанавливают на угол до 30° по отношению к направлению на Солнце и фиксируют в этом положении.
Достигаемый технический результат заключается в уменьшении времени ввода космического аппарата в штатную эксплуатацию с одновременной минимизацией затрат топлива, а также в возможности использовать штатные подсистемы космического аппарата, с минимальной модификацией программного обеспечения, для задач довыведения космического аппарата.
Изобретение поясняется чертежами, которые не охватывают и тем более не ограничивают весь объем притязаний данного технического решения, а являются лишь иллюстрирующими материалами частного случая выполнения:
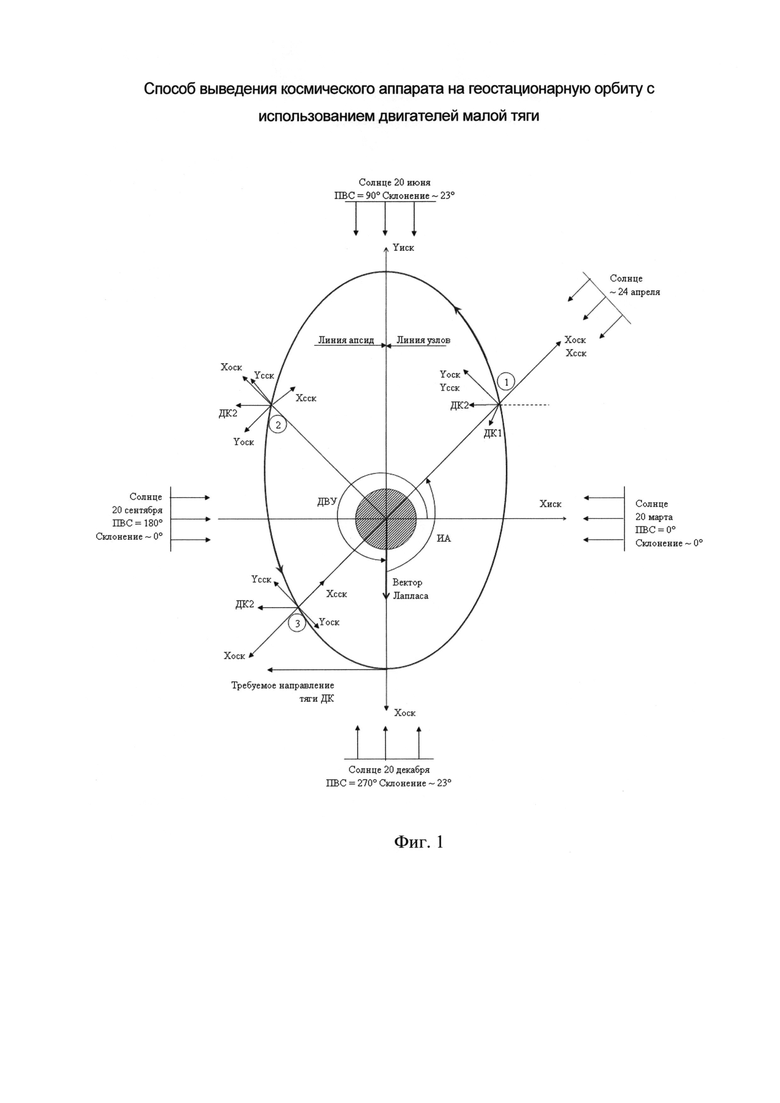
На фиг. 1 представлен пример промежуточной орбиты, на которую космический аппарат выводится с помощью последней ступени ракеты-носителя или разгонного блока. Используются следующие условные обозначения: ХСCK, YCCK - оси X и Υ связанной системы координат космического аппарата; ХOCK, YOCK - оси X и Υ орбитальной системы координат космического аппарата; ХИСК, YИСК - оси X и Υ инерциальной системы координат; ДВУ - долгота восходящего узла орбиты; ДК1 и ДК2 - штатные двигатели коррекции №1 и №2 соответственно; ИА - истинная аномалия; ПВС - прямое восхождение Солнца в инерциальной системе координат.
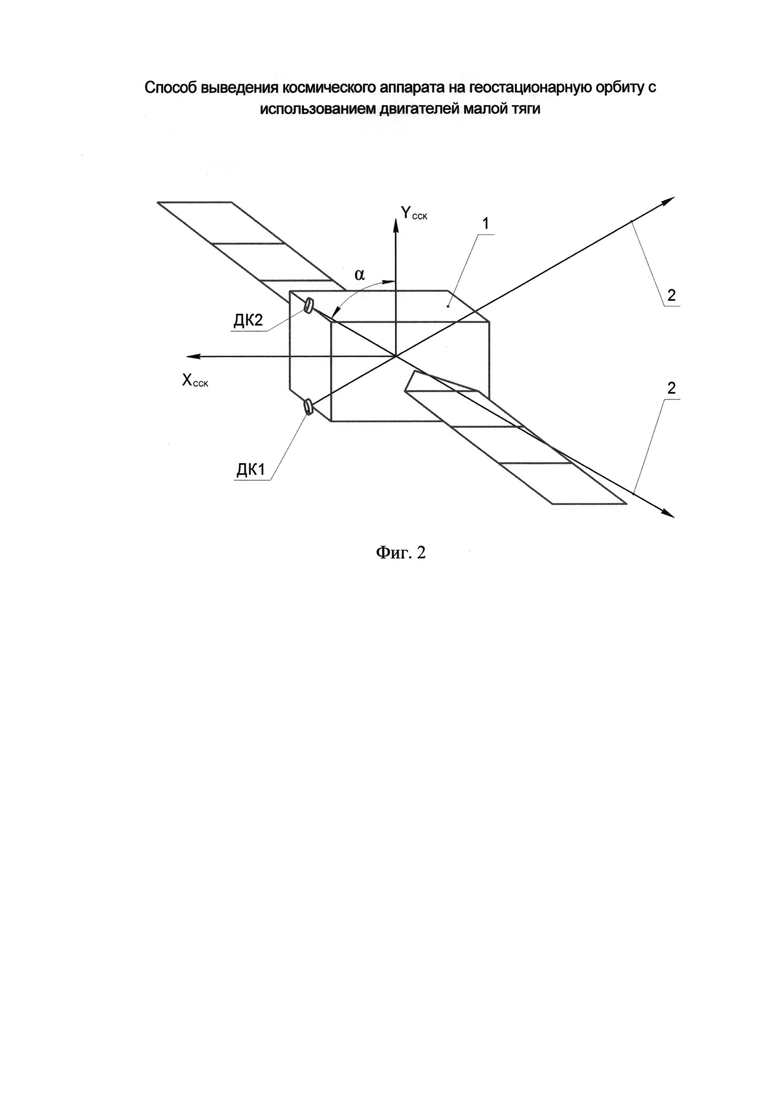
На фиг. 2 представлена схема размещения штатных двигателей коррекции долготы ДК1 и ДК2 на космическом аппарате.
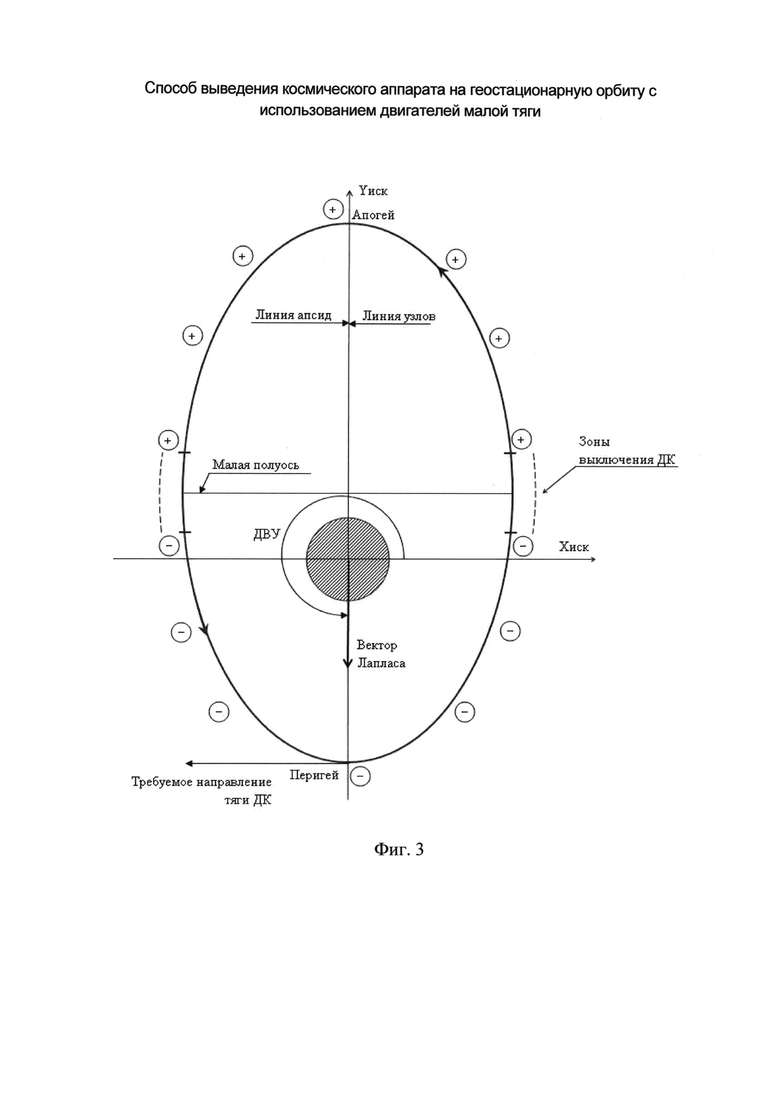
На фиг. 3 представлена схема расположения зон «разгона» и «торможения» на переходной орбите при реализации довыведения. Используются следующие условные обозначения: ХИСК, УИСК - оси X и Υ инерциальной системы координат; ДВУ - долгота восходящего узла орбиты.
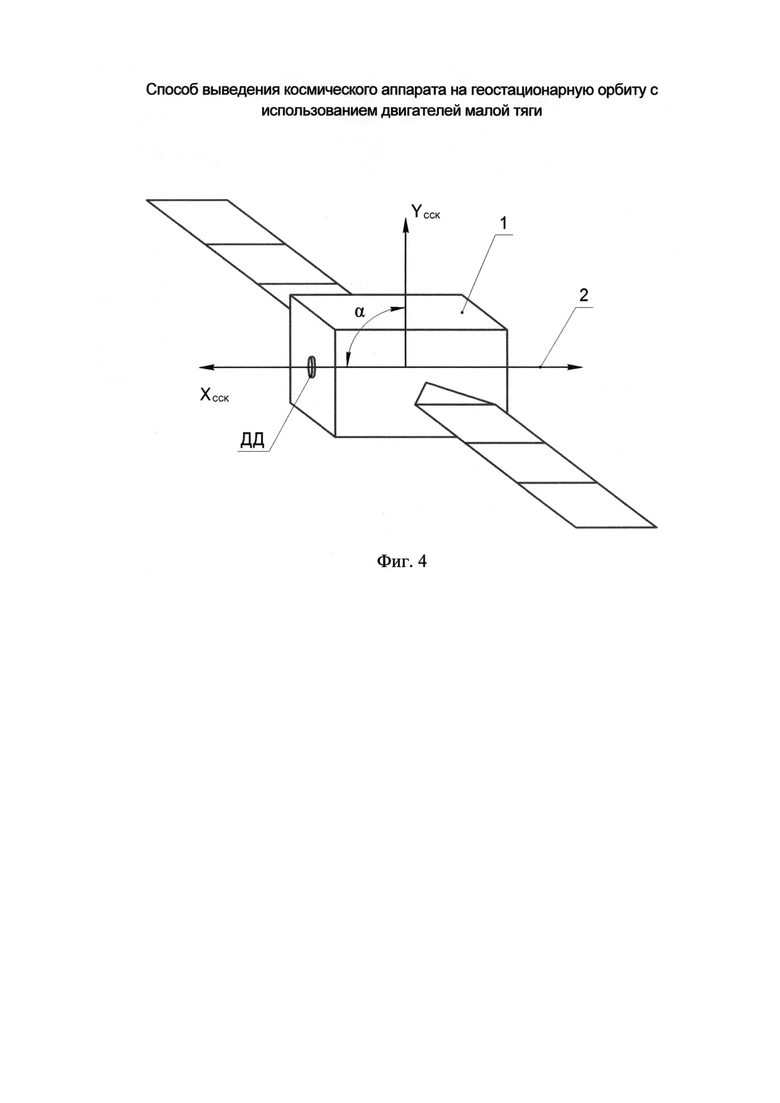
На фиг. 4 представлена схема размещения дополнительного электрореактивного двигателя ДД для задач довыведения.
Способ выведения космического аппарата на геостационарную орбиту с использованием двигателей малой тяги заключается в следующем. Космический аппарат выводится с помощью средств выведения с двигателем большой тяги на переходную орбиту с высотой апогея выше высоты геостационарной орбиты и высотой перигея ниже высоты геостационарной орбиты, при этом наклонение переходной орбиты может быть как равно нулю, так и отличаться от нуля. Для довыведения используется один из штатных двигателей системы коррекции, причем космический аппарат ориентируют в инерциальном пространстве таким образом, чтобы направление действия тяги двигателя совпадало с векторным произведением вектора Лапласа и вектора площадей и не изменялось во всех точках переходной орбиты (см. фиг. 1). При этом, как видно на фиг. 2, штатные двигатели коррекции долготы ДК1 и ДК2 на космическом аппарате 1 могут быть установлены под углом α к оси YССК связанной системы координат, их линии действия тяги 2 могут не совпадать с осью ХССК космического аппарата, что не оказывает влияния на длительность этапа довыведения космического аппарата, а определяет лишь положение осей связанной системы координат в инерциальной системе координат.
Одновременно с довыведением космического аппарата на геостационарную орбиту осуществляют перевод космического аппарата в рабочую точку геостационарной орбиты путем изменения периода обращения космического аппарата вокруг Земли за счет регулирования длительности работы двигателя коррекции на участках разгона и торможения, отмеченных на фиг. 3 знаками «+» и «-» соответственно. Длительность и расположение участков выключения двигателей коррекции ДК зависит от разницы между долготой рабочей точки космического аппарата и долготой точки отделения космического аппарата от последней ступени ракеты-носителя или разгонного блока, а также от требуемой скорости приведения космического аппарата в рабочую точку.
Для обеспечения требуемого энергобаланса космического аппарата нормаль панелей солнечных батарей предустанавливают на угол не более чем +30° по отношению к направлению на Солнце и фиксируют в этом положении на срок до 60 суток. По истечении указанного периода времени нормаль панелей солнечных батарей будет составлять угол не более чем -30° с направлением на Солнце и потребуется однократный поворот панелей солнечных батарей на угол 60° либо 300°, в зависимости от возможностей устройства поворота солнечных батарей.
Для обеспечения ресурсных характеристик двигателей ДК1 и ДК2 и повышения надежности функционирования космического аппарата возможно, но не обязательно, проведение замены одного рабочего двигателя на другой в процессе довыведения с соответствующей переориентацией осей связанной системы координат космического аппарата.
С целью дальнейшего уменьшения длительности довыведения космического аппарата 1 дополнительно может быть установлен один (фиг. 4) или несколько дополнительных электрореактивных двигателей (ДД), обладающих тягой, большей чем двигатели ДК1 и ДК2, причем вектор тяги 2 двигателей ДД перпендикулярен одновременно и бинормали к плоскости переходной орбиты, и оси вращения солнечных батарей космического аппарата. Данные двигатели используют исключительно для задач довыведения космического аппарата.
Учитывая, что процесс довыведения может продолжаться продолжительное время (несколько месяцев), в течение которого невозможна коррекция наклонения, начальное наклонение задается таким образом, чтобы за счет естественной эволюции переходной орбиты в процессе довыведения наклонение орбиты свелось к нулю к окончанию довыведения. Требуемая эволюция наклонения достигается выбором времени старта, обеспечивающим оптимальную ориентацию орбитальной плоскости в инерциальном пространстве.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫВЕДЕНИЯ КОСМИЧЕСКОГО АППАРАТА НА ГЕОСТАЦИОНАРНУЮ ОРБИТУ С ПОМОЩЬЮ ЭЛЕКТРОРЕАКТИВНЫХ ДВИГАТЕЛЕЙ | 2015 |
|
RU2619486C2 |
| СПОСОБ И СИСТЕМА ВЫВЕДЕНИЯ НА ЗАДАННУЮ ОРБИТУ КОСМИЧЕСКОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ДВИГАТЕЛЕЙ, ОБЛАДАЮЩИХ БОЛЬШИМ УДЕЛЬНЫМ ИМПУЛЬСОМ | 1997 |
|
RU2212363C2 |
| Способ обслуживания космических объектов на орбитах различного наклонения и высокоорбитальная космическая инфраструктура для реализации способа | 2022 |
|
RU2775039C1 |
| СПОСОБ ВЫВЕДЕНИЯ КОСМИЧЕСКИХ АППАРАТОВ НА ОРБИТУ | 2023 |
|
RU2794486C1 |
| СПОСОБ ОДНОВРЕМЕННОГО ВЫВЕДЕНИЯ НЕСКОЛЬКИХ СПУТНИКОВ НА НЕ ЯВЛЯЮЩИЕСЯ КОМПЛАНАРНЫМИ ОРБИТЫ С ИСПОЛЬЗОВАНИЕМ СИЛЬНО ЭКСЦЕНТРИЧЕСКИХ ОРБИТ И АТМОСФЕРНОГО ТОРМОЖЕНИЯ | 1997 |
|
RU2220886C2 |
| СПОСОБ МЕЖОРБИТАЛЬНОЙ ТРАНСПОРТИРОВКИ ПОЛЕЗНЫХ ГРУЗОВ | 2009 |
|
RU2404091C1 |
| Способ обслуживания системы спутников на околокруговых орбитах и космическая обслуживающая система для осуществления способа | 2022 |
|
RU2772498C1 |
| СПОСОБ ПЕРЕФАЗИРОВАНИЯ КОСМИЧЕСКИХ АППАРАТОВ НА ОКОЛОЗЕМНОЙ ОРБИТЕ | 2023 |
|
RU2806928C1 |
| Способ обслуживания искусственных спутников на средних и высоких околоземных орбитах | 2022 |
|
RU2774915C1 |
| СПОСОБ ПРИВЕДЕНИЯ НА ЗАДАННУЮ ОРБИТАЛЬНУЮ ПОЗИЦИЮ И ПЕРЕВОДА НА НОВУЮ ОРБИТАЛЬНУЮ ПОЗИЦИЮ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА | 2022 |
|
RU2788555C1 |
Изобретение относится к межорбитальному маневрированию космического аппарата (КА). Способ включает выведение КА на переходную орбиту с нулевым наклонением двигателями большой тяги. Перигей этой орбиты лежит ниже геостационарной орбиты (ГСО), а апогей - выше ГСО. Довыведение КА на ГСО производится двигателями малой тяги, работающими непрерывно, за исключением двух симметричных малоэффективных участков переходной орбиты. При этом ориентация КА в инерциальном пространстве неизменна, а панели солнечных батарей зафиксированы под углом до 30° к направлению на Солнце. Одновременно с изменением эксцентриситета переходной орбиты изменяют скорость дрейфа КА в требуемом направлении и совмещают довыведение по эксцентриситету с приведением по долготе. В качестве двигателя малой тяги используют штатный электрореактивный двигатель коррекции долготы КА. Техническим результатом изобретения являются сокращение срока ввода КА в эксплуатацию на ГСО и минимизация затрат топлива на довыведение КА. 1 з.п. ф-лы, 4 ил.
1. Способ выведения космического аппарата на геостационарную орбиту, заключающийся в том, что космический аппарат выводится с помощью средств выведения с двигателем большой тяги на переходную орбиту с нулевым наклонением, с перигеем ниже высоты геостационарной орбиты и апогеем выше высоты геостационарной орбиты, с которой осуществляется довыведение космического аппарата на геостационарную орбиту с помощью двигателей малой тяги, непрерывно работающих на всем протяжении переходной орбиты, за исключением двух симметрично расположенных участков переходной орбиты, на которых работа двигателей малой тяги малоэффективна, отличающийся тем, что в процессе довыведения ориентация космического аппарата в инерциальном пространстве остается неизменной на всем протяжении этапа довыведения, причем одновременно с изменением эксцентриситета орбиты изменяют скорость дрейфа космического аппарата в требуемом направлении и совмещают довыведение по эксцентриситету с приведением по долготе, при этом в качестве двигателя малой тяги используют штатный электрореактивный двигатель коррекции долготы космического аппарата, а для обеспечения требуемого энергобаланса космического аппарата нормаль панелей солнечных батарей предустанавливают на угол до 30° по отношению к направлению на Солнце и фиксируют в этом положении.
2. Способ по п. 1, отличающийся тем, что для обеспечения ресурсных характеристик штатных двигателей коррекции довыведение космического аппарата осуществляют поочередно одним из двух штатных двигателей коррекции долготы.
| СПОСОБ ВЫВЕДЕНИЯ КОСМИЧЕСКОГО АППАРАТА НА ЗАДАННУЮ ОРБИТУ С ИСПОЛЬЗОВАНИЕМ ДВИГАТЕЛЕЙ МАЛОЙ ТЯГИ | 2001 |
|
RU2208557C1 |
| Пакет пластинчатого теплообменного аппарата | 1977 |
|
SU673833A1 |
| US 5716029 A1, 10.02.1998 | |||
| US 6116543 A1, 12.09.2000 | |||
| СПОСОБ ВЫВЕДЕНИЯ КОСМИЧЕСКОГО АППАРАТА С ГЕОПЕРЕХОДНОЙ ОРБИТЫ НА ГЕОСТАЦИОНАРНУЮ ОРБИТУ | 2009 |
|
RU2408506C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОДВИЖНОСТИ И СПОСОБ ОЦЕНКИ ПОДВИЖНОСТИ ПАРНОГО ГЛАЗА, ОПОРНО-ДВИГАТЕЛЬНОЙ КУЛЬТИ И ГЛАЗНОГО КОСМЕТИЧЕСКОГО ПРОТЕЗА | 2014 |
|
RU2569162C1 |

