Объектом предлагаемого изобретения является способ одновременного выведения нескольких спутников на не являющиеся компланарными орбиты, в соответствии с которым первый спутник размещают на носителе, адаптированном для практически непосредственного выведения первого спутника на некоторую конечную орбиту, которая характеризуется первыми орбитальными параметрами, а именно: первой величиной эксцентриситета, первой величиной наклонения и первой величиной апогея, и размещают на этом же носителе по меньшей мере второй спутник, предназначенный для выведения на вторую конечную орбиту, которая характеризуется вторыми орбитальными параметрами, а именно: второй величиной эксцентриситета, второй величиной наклонения и второй величиной апогея, которые существенно отличаются от соответствующих орбитальных параметров первой орбиты, непосредственно обеспечиваемой данным носителем для первого спутника, запускаемого одновременно с вторым спутником.
Одновременные запуски двух или нескольких спутников одним носителем обычно обеспечивают выведение этих спутников на копланарные орбиты с близкими значениями эксцентриситета.
В некоторых случаях, например в случае второго запуска Н2, осуществляют повторное включение двигателя последней ступени носителя для того, чтобы вывести второй спутник на некоторую промежуточную геостационарную орбиту после выведения первого спутника, до повторного включения последней ступени носителя, на низкую круговую орбиту. В этом случае, однако, орбиты двух спутников, размещенных на одном и том же носителе, остаются практически копланарными.
В то же время существует важное требование, которое заключается в необходимости выведения различных спутников на не являющиеся копланарными орбиты, в частности требование выведения первого спутника на низкую наклонную круговую орбиту, в предпочтительном варианте полярную, и выведения второго спутника на геостационарную орбиту или же требование выведения нескольких спутников на орбиты с сильно отличающимися величинами наклонения (например, на орбиты с наклонениями 0o, 55o и 65o).
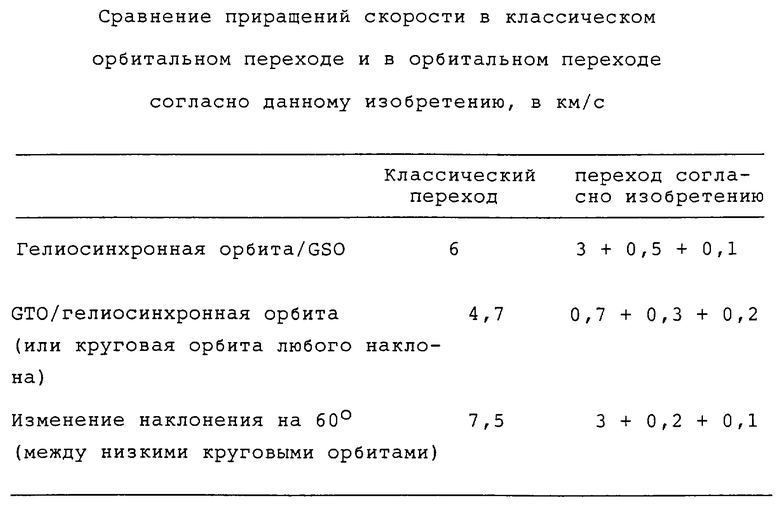
На практике же такие динамические задачи никогда не рассматривались, поскольку изменения наклонения низкой орбиты, обеспечиваемые классическими способами, оказываются весьма дорогостоящими. Так, например, приращение скорости, необходимое для перехода с полярной гелиосинхронной орбиты на низкую экваториальную круговую орбиту, составляет 11 км/с, то есть имеет такую величину, которой достаточно для запуска с поверхности Земли космического аппарата на лунную орбиту.
При решении задачи выведения на орбиту единственного спутника уже были использованы законы небесной механики, в соответствии с которыми приращение скорости, которое требуется сообщить спутнику для изменения наклонения его орбиты, уменьшается в тем большей степени, чем большую величину апогея имеет данная промежуточная орбита.
Эта особенность использована, в частности, на ракете-носителе ПРОТОН для выведения на геостационарную орбиту одного спутника: этот спутник выводится на суперсинхронную орбиту и коррекция наклонения этой орбиты (примерно 50o) осуществляется в апогее (имеющем высоту от 50000 км до 90000 км), что позволяет оптимизировать необходимую для данного маневра величину полного приращения скорости. В этом случае величина требуемого приращения скорости уменьшается на несколько сотен метров в секунду.
Это приращение скорости также оказывается тем меньшим, чем больше эксцентриситет промежуточной орбиты. С другой стороны, увеличение апогея орбиты до величин более 36000 км не требует значительного приращения скорости.
Для осуществления изменения наклонения орбиты спутника может быть использована помощь лунного притяжения. Так, в заявке на патент Франции на имя Европейского Общества Реактивного движения, поданной в тот же день, что и данная заявка на патент, описываются способ и система одновременного выведения нескольких спутников на не являющиеся копланарными орбиты с использованием лунного гравитационного воздействия. В этом случае приращение скорости, позволяющее обеспечить изменение наклонения орбиты спутника, формируется при помощи воздействия лунного притяжения. Однако использование этой гравитационной реакции удлиняет маневр, продолжительность которого в этом случае составляет от 7 до 28 суток. Тем не менее, существуют случаи, когда оказывается желательным воспользоваться более коротким временем перехода, вследствие чего предпочтительно, чтобы упомянутое приращение скорости было получено не в результате гравитационного воздействия луны, а было реализовано с использованием фазы реактивной тяги.
Кроме того, известен патент US 5178347, описывающий способ и средства выведения в космическое пространство на низкую орбиту капсулы одновременно со спутником, размещенным в последней ступени носителя и выводимым на более энергетическую орбиту, чем орбита капсулы. В этом случае необходимо отметить, что капсула отделяется обязательно на компланарной с основным спутником орбите.
Краткое описание изобретения
Задача предлагаемого изобретения состоит в том, чтобы обеспечить возможность достаточно экономичным образом запускать несколько спутников, предназначенных для выведения на не являющиеся компланарными орбиты.
Говоря более конкретно, задача данного изобретения состоит в том, чтобы существенным образом уменьшить количество энергии, используемое системами создания реактивной тяги, расположенными на спутниках, для их выведения на заданные орбиты при том, чтобы эти спутники не были выведены на промежуточную орбиту, близкую к их конечным орбитам, непосредственно носителем, на котором эти спутники были установлены, и без использования воздействия лунного притяжения.
Поставленные задачи решаются при помощи способа одновременного запуска нескольких спутников на не являющиеся копланарными орбиты, в соответствии с которым размещают первый спутник на носителе, адаптированном для практически непосредственного выведения этого первого спутника на первую конечную орбиту, имеющую первые орбитальные параметры, а именно: первую величину эксцентриситета, первую величину наклонения и первую величину апогея, и размещают на этом носителе по меньшей мере второй спутник, предназначенный для выведения на вторую конечную орбиту, имеющую вторые орбитальные параметры, а именно: вторую величину эксцентриситета, вторую величину наклонения и вторую величину апогея, которые существенно отличаются от соответствующих величин первых орбитальных параметров, обеспечиваемых носителем и сообщаемых первому спутнику, выводимому в космос одновременно с по меньшей мере одним вторым спутником.
Предлагаемый способ в соответствии с данным изобретением отличается тем, что для выведения на заданную конечную орбиту второго спутника осуществляют в процессе первого орбирального маневра перевод второго спутника на сильно эллиптическую орбиту ожидания, апогей которой обычно имеет величину от 50000 км до 400000 км и большая полуось которой располагается в исходной орбитальной плоскости, в процессе второго орбитального маневра осуществляют (находясь в непосредственной близости от апогея орбиты ожидания) изменение наклонения орбиты ожидания и изменение ее перигея для того, чтобы вывести второй спутник на промежуточную орбиту, затем осуществляют третий орбитальный маневр на участке траектории промежуточной орбиты, после чего осуществляют четвертый орбитальный маневр, содержащий по меньшей мере один этап, использующий торможение в верхних слоях атмосферы в окресности перигея промежуточной орбиты таким образом, чтобы уменьшить высоту апогея промежуточной орбиты, и затем осуществляют пятый орбитальный маневр, в процессе которого второму спутнику в апогее его промежуточной орбиты сообщается импульс количества движения таким образом, чтобы увеличить высоту перигея его орбиты и перевести промежуточную орбиту во вторую конечную орбиту, представляющую собой низкую наклонную орбиту.
Период ТА орбиты ожидания рассчитывается таким образом, чтобы апогей этой орбиты ожидания находился в зоне прямой видимости одной из наземных станций слежения, а второй орбитальный маневр выполняется в непосредственной близости от апогея этой орбиты ожидания под управлением наземной станции слежения.
Третий орбитальный маневр коррекции маршевого участка траектории промежуточной орбиты позволяет разместить высоту перигея промежуточной орбиты на уровне от 80 км до 140 км.
В четвертом орбитальном маневре, содержащем по меньшей мере один этап, использующий торможение спутника в верхних слоях атмосферы, используют контроль пространственного положения второго спутника таким образом, чтобы ось его торможения в верхних слоях атмосферы располагалась практически на одной линии с вектором его скорости.
В соответствии с одним из возможных способов реализации предлагаемого изобретения четвертый орбитальный маневр содержит совокупность этапов, использующих торможение спутника в верхних словиях атмосферы таким образом, чтобы на каждом из этапов уменьшать высоту апогея промежуточной орбиты.
Предлагаемое изобретение касается также способа, предназначенного для осуществления одновременного запуска нескольких спутников на конечные орбиты, представляющие собой орбиты небольшой высоты, в частности представляющие собой низкие круговые орбиты с различными наклонениями, тогда как первый спутник выводится на первую конечную орбиту, представляющую собой переходную геостационарную орбиту с относительно небольшим наклонением или супергеостационарную промежуточную орбиту, отличающегося тем, что в процессе осуществления второго орбитального маневра отдельно выполняют для каждого второго спутника коррекцию маршевого участка траектории на полуорбите, исходящей из орбиты ожидания, что обеспечивает возможность для каждого второго спутника прогнозировать в апогее орбиты ожидания специфическое изменение наклонения этой орбиты, и в процессе третьего орбитального маневра осуществляют для каждого второго спутника вторую коррекцию маршевого участка траектории на каждой промежуточной орбите для корректировки каждой величины перигея для каждой из промежуточных орбит спутников.
В качестве одного из возможных вариантов предлагаемое изобретение касается также способа, предназначенного одновременно для запуска нескольких вторых спутников, предназначенных для выведения на конечные орбиты, представляющие собой относительно низкие орбиты, тогда как первый спутник выводится на первую конечную орбиту, представляющую собой слабо наклоненную геостационарную промежуточную орбиту или супергеостационарную промежуточную орбиту, отличающегося тем, что в процессе осуществления первого орбитального маневра вторые спутники переводятся на суперсинхронные и слегка отличающиеся друг от друга орбиты ожидания посредством сообщения им очень небольших приращений скорости, а в процессе осуществления второго орбитального маневра выполняют идентичные изменения наклонения орбит для всех вторых спутников таким образом, чтобы вывести их на подобные промежуточные орбиты, но с определенной разностью периодов обращения, что приводит к различию моментов прохождения различными вторыми спутниками перигея промежуточных орбит, с тем, чтобы после завершения пятого орбитального маневра различные вторые спутники были выведены на одну и ту же конечную орбиту, представляющую собой низкую наклоненную орбиту, но имея при этом отличающиеся друг от друга фазы.
Объектом предлагаемого изобретения является также система запуска спутников, предназначенная для осуществления описанного выше способа, отличающаяся тем, что она содержит носитель, первый спутник, располагающийся на этом носителе, который адаптирован для практически непосредственного выведения первого спутника на первую конечную орбиту, и по меньшей мере один второй спутник, предназначенный для выведения на вторую конечную орбиту, отличную от первой орбиты, а также тем, что второй спутник оснащен бортовым компьютером и системой создания реактивной тяги на химическом топливе, содержащей главный двигатель, установленный на борту второго спутника, и управляющие двигатели, предназначенные для контроля углового положения спутника.
В соответствии с одной из характеристик предлагаемого изобретения второй спутник содержит датчик ориентации на небесное светило, датчик земной ориентации с переменным полем обзора и таблицу эфемеридов, заложенную в бортовой компьютер спутника и позволяющую рассчитать углы между вектором тяги и направлениями на Солнце и на Землю, то есть определить пространственную ориентацию второго спутника при выполнении орбитальных маневров.
Кроме того, второй спутник может иметь на борту гироскопические датчики угловых скоростей, контролирующие работу реактивных двигателей управления пространственной ориентацией, которые обеспечивают вращение корпуса второго спутника для ориентации вектора тяги главного двигателя в требуемом направлении.
Еще предлагаемое изобретение касается системы запуска, предназначенной для осуществления описанного выше способа и отличающейся тем, что она содержит носитель, первый спутник, установленный на этом носителе, который адаптирован для практически непосредственного выведения первого спутника на первую конечную орбиту, и по меньшей мере один второй спутник, предназначенный для выведения на вторую конечную орбиту, отличную от первой конечной орбиты, а также тем, что второй спутник оснащен бортовым компьютером и содержит дополнительно систему создания тяги с помощью электрического ракетного двигателя, имеющую в своем составе по меньшей мере электрические ракетные двигатели с большим удельным импульсом, установленные на борту второго спутника, причем электрические ракетные двигатели могут быть ионного типа, электродугового типа или с замкнутым дрейфом электронов.
В соответствии с одним из возможных вариантов реализации второй спутник содержит датчик земного горизонта с переменным полем обзора, предназначенный для определения направления на Землю, маховики, предназначенные для обеспечения пространственной ориентации второго спутника, а бортовой компьютер данного спутника использует закон управления электрическими ракетными двигателями, состоящий в поддержании вектора тяги перпендикулярным направлению со спутника на Землю.
В соответствии с другим возможным вариантом реализации второй спутник содержит датчик ориентации на небесное светило, а также таблицу эфемеридов, заложенную в бортовом вычислителе спутника для определения его пространственной ориентации, и маховики для обеспечения пространственной ориентации спутника, а бортовой компьютер использует закон управления электрическими ракетными двигателями, состоящий в ориентировании вектора тяги в инерциальном направлении.
В предпочтительном варианте реализации предлагаемого изобретения корпус второго спутника оборудован по меньшей мере двумя лазерными уголковыми отражателями, обеспечивающими возможность очень точного определения при помощи лазерной телеметрии положения второго спутника перед началом выполнения коррекции на маршевом участке траектории при осуществлении третьего маневра.
Система создания тяги с использованием двигателей на химическом топливе и система создания тяги с помощью электрических ракетных двигателей могут быть одновременно установлены на одном и том же спутнике.
Второй спутник может быть оборудован по меньшей мере двумя панелями солнечных батарей, располагающимися симметрично относительно корпуса спутника, или по меньшей мере одной панелью солнечных батарей и одним теплозащитным экраном.
Краткое описание чертежей
Другие характеристики и преимущества предлагаемого изобретения будут лучше поняты из приведенного ниже описания не являющихся ограничительными примеров его практической реализации со ссылкой на приложенные чертежи, на которых
- Фиг. 1 представляет собой схему, иллюстрирующую пример осуществления способа в соответствии с предлагаемым изобретением для выведения первого спутника на геостационарную орбиту и выведения на эту орбиту второго спутника, переводимого затем с этой геостационарной орбиты на гелиосинхронную орбиту;
- Фиг. 2 представляет собой схематический вид примера конфигурации бортового оборудования спутника, адаптированного для осуществления изменения его орбиты с использованием способа в соответствии с предлагаемым изобретением;
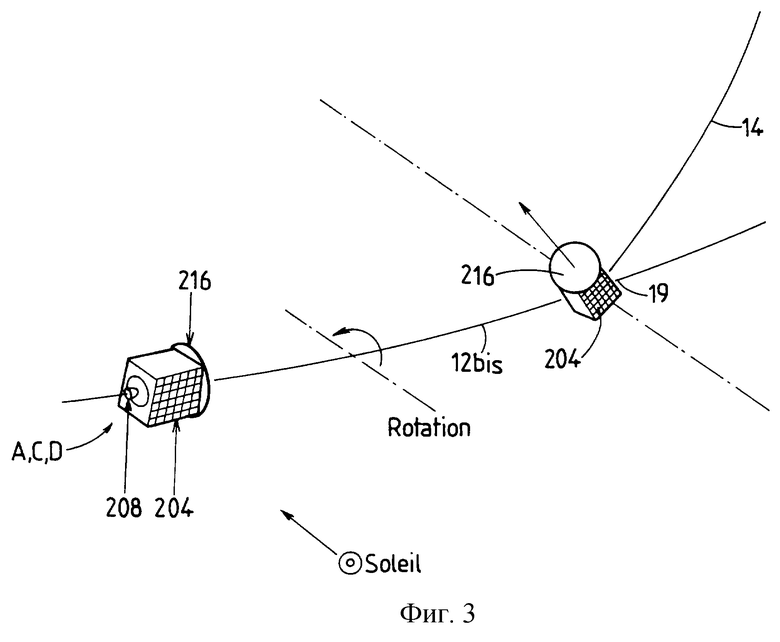
- Фиг.3 представляет собой схему, иллюстрирующую использование спутника, оборудованного теплозащитным экраном и осуществляющего часть маневра согласно способу в соответствии с предлагаемым изобретением, а именно: приведение к заданной пространственной ориентацией и включение двигателя коррекции орбиты в апогее сильно эллиптической орбиты ожидания для выведения этого спутника на промежуточную орбиту.
Подробное описание примеров реализации данного изобретения
Пример практического осуществления способа в соответствии с предлагаемым изобретением будет теперь подробно описан со ссылками на приведенную в приложении фиг.1.
Два спутника А и В установлены на одном и том же носителе, адаптированном для выведения этих спутников А и В на переходную геостационарную орбиту 12 вращения вокруг Земли 10.
Первый спутник В отделяется от носителя в точке 1 этой орбиты 12 и переводится затем при помощи своих собственных средств на геостационарную орбиту 15.
Спутник А, который может быть связан с последней ступенью носителя, получает от носителя при прохождении перигея 2 орбиты 12 импульс количества движения, переводящий спутник на эллиптическую орбиту ожидания 12бис с периодом обращения ТА, который будет определен в последующем изложении.
В соответствии с одним из возможных вариантов реализации спутник А просто отделяется от носителя и основная система создания реактивной тяги с использованием двигателей на химическом топливе, установленная на спутнике А, включается в зоне 3. При этом импульс количества движения, сообщаемый спутнику его двигателем, выводит спутник на орбиту ожидания 12бис.
Когда спутник А проходит через апогей 19 орбиты ожидания 12 бис, будучи ориентированным соответствующим образом в инерциальном направлении при помощи собственной бортовой системы управления пространственной ориентацией, включается главный двигатель коррекции орбиты спутника А для реализации изменения наклонения 5а, что позволяет перевести спутник А на эллиптическую орбиту 14, располагающуюся в гелиосинхронной плоскости или плоскости искомой низкой круговой орбиты РН. Перигей орбиты 14 имеет высоту в диапазоне от 80 до 170 км. Для корректировки высоты перигея в предпочтительном варианте реализации осуществляют коррекцию на маршевом участке в зоне 5б.
Затем позволяют последовательными переходами к перигеям 6а, 6б меньшать значения апогеев 19а, 196, 19с рассматриваемой орбиты 14а, 146, 14с до получения орбиты, апогей которой обычно имеет величину менее 1000 км. При выполнении заключительного маневра главный двигатель коррекции орбиты спутника А выдает в апогее 19с импульс для перехода спутника на круговую орбиту 11, которая может быть гелиосинхронной или несколько наклоненной.
В данном случае имеется возможность использовать нодальную прецессию, связанную со сплюснутостью Земли на полюсах, для корректировки до желаемой величины времени прохождения восходящего узла искомой гелиосинхронной орбиты.
В данном описании под термином "носитель" следует понимать ракету-носитель любого подходящего в данном случае типа.
Последовательность описанных выше маневров изменения орбиты спутника учитывает следующие общие соображения, известные из теории и практики космических полетов:
- приращение скорости, необходимое для изменения наклонения орбиты, имеет тем меньшую величину, чем больший эксцентриситет имеет данная орбита (или чем выше ее апогей). Такие орбиты называют суперсинхронными;
- прирост скорости, обеспечиваемый ракетой-носителем для перехода с геостационарной переходной орбиты (GTO) на некоторую суперсинхронную переходную орбиту, является весьма небольшим (менее 600 метров в секунду), хотя при этом увеличение высоты апогея будет значительным (от 36000 км до 60000 или даже 400000 км);
- в том случае, когда желательно преобразовать эллиптическую орбиту в низкую круговую орбиту, нет необходимости сообщать спутнику значительный тормозной импульс, поскольку атмосферное торможение в перигее орбиты позволяет при помощи последовательных проходов через верхние слои атмосферы уменьшить высоту апогея при минимальном расходе ракетного топлива (на осуществление импульсов коррекции орбиты). Кроме того, если в данном случае допустимо ограничить тепловой поток величиной 6 кВт/м2 в процессе прохождения спутника через верхние слои атмосферы, нет необходимости предусматривать специальные средства тепловой защиты спутника.
В рамках одновременного запуска нескольких спутников способ в соответствии с предлагаемым изобретением позволяет, таким образом, осуществить для по меньшей мере одного из этих спутников переход с геостационарной переходной орбиты на по меньшей мере одну низкую круговую наклоненную орбиту, не прибегая к использованию лунного гравитационного воздействия.
Способ в соответствии с предлагаемым изобретением характеризуется, в частности, следующими моментами, проиллюстрированными со ссылками на фиг. 1 и 3:
1. Первый спутник В выводится на слабо наклоненную переходную орбиту (наклонение которой составляет обычно 7o при запуске спутника с космодрома Куру во Французской Гвиане), второй спутник А (или группа спутников А, С, D) выводится на сильно эксцентрическую суперсинхронную переходную орбиту 12бис. Эта орбита 12бис может быть получена либо при помощи последней ступени ракеты-носителя, либо при помощи собственного двигателя коррекции орбиты спутника А или спутников А, С, D.
2. В окрестности апогея 19 суперсинхронной орбиты 12бис спутник А ориентируется своим выдаваемым вектором тяги двигателя коррекции орбиты таким образом, чтобы обеспечить желаемое наклонение новой орбиты.
Изменение наклонения орбиты спутника А предпочтительно имеет место в окрестности локального юга или полудня таким образом, чтобы панели солнечных батарей спутника оставались освещенными в максимально возможной степени.
Упомянутое изменение наклонения орбиты может быть зарегистрировано гироскопическими датчиками угловых скоростей или упрощенными звездными датчиками.
3. Главный двигатель коррекции орбиты спутника А (эквивалентный двигателю апогея на геостационарном спутнике) запускается. При этом спутник А переходит на орбиту 14 с желаемой величиной наклонения.
4. Номинальная высота полета спутника А корректируется снова (стороной использования, повернутой в направлении Земли, обозначенной позицией 10).
5. Коррекция орбиты на маршевом участке в зоне 5б позволяет довести высоту перигея (6а) до величины, необходимой для корректного и расчетного использования торможения спутника в верхних слоях атмосферы.
6а. Панели солнечных батарей спутника А ориентированы против вектора скорости таким образом, чтобы обеспечить стабильное атмосферное торможение (величина теплового потока составляет менее 6 кВт на квадратный метр).
7а. Многочисленные проходы спутника через перигей его орбиты позволяют уменьшить апогей этой орбиты 19а, 19б до желаемой в данном случае величины 19с (которая составляет обычно от 600 км до 1200 км).
6б. В соответствии с возможным альтернативным вариантом реализации панели солнечных батарей спутника А могут находиться в сложенном состоянии позади теплозащитного экрана для того, чтобы обеспечить необходимую величину атмосферного торможения спутника за один главный проход перигея его орбиты.
7б. Апогей орбиты 19 спутника А достигает желаемой величины 19с (сразу или после прохождения спутника по нескольким орбитам, предназначенным для доведения высоты апогея до желаемой величины).
8. Высота перигея 6б увеличивается при помощи включания двигателя коррекции орбиты в апогее 19с. При этом спутник А выходит на свою номинальную орбиту 11.
Описанная выше процедура может быть применена к любому числу спутников (А, С, D ), запускаемых одновременно одной и той же ракетой-носителем, что позволяет сразу выводить на заданные орбиты, не являющиеся копланарными, целую группу спутников.
В соответствии с одним из аспектов предлагаемого изобретения производится гармонизация запуска с ограничениями, накладываемыми законами небесной механики.
Так, для использования условия непосредственной видимости с наземной станции слежения, контролирующей данный спутник А в процессе осуществления второго орбитального маневра в окрестности апогея 19, необходимо, чтобы полупериод ТА обращения спутника по эллиптической орбите 12бис был равен величине, кратной 12 часам и уменьшенной на относительную долготу между местом запуска спутника и местом расположения станции слежения. В том случае, когда станция слежения располагается в окрестности места запуска спутника, необходимо, таким образом, чтобы полупериод обращения спутника по этой суперсинхронной орбите был близок к величине, кратной 12 часам или 24 часам. Это обстоятельство будет определять высоту апогея 19 эллиптической орбиты.
В то же время следует отметить, что для преобразования эллиптической орбиты в низкую круговую орбиту в данном случае нет необходимости в сообщении спутнику значительного тормозного импульса. Естественное атмосферное торможение в перигее такой орбиты позволяет при помощи последовательных проходов через верхние слои атмосферы уменьшить высоту апогея орбиты обращения спутника с минимальными затратами реактивного топлива (которое в этом случае необходимо только для выполнения нескольких корректирующих импульсов). Кроме того, при условии ограничения допустимого теплового потока в процессе прохождения спутником верхних слоев атмосферы в перигее своей орбиты величиной 6 кВт на квадратный метр можно отказаться от использования специальной тепловой защиты.
Теперь со ссылками на фиг.2 будет подробно описан пример реализации системы запуска спутника, позволяющей использовать предлагаемое изобретение, касающееся запуска нескольких спутников на не являющиеся копланарными орбиты одной ракетой-носителем.
Первый спутник В и второй спутник А, схематический пример реализации комплекса оборудования которого представлен на фиг.2, устанавливаются на ракете-носителе обычного типа, которая на приведенных в приложении к описанию фигурах не показана.
Поскольку ракетный носитель специальным образом адаптирован для практически непосредственного выведения первого спутника В на его конечную орбиту, спутник В может представлять собой спутник совершенно обычного типа и вследствие этого может быть оборудован только обычными средствами создания реактивной тяги, предназначенными для реализации небольших импульсов коррекции траектории его полета.
Второй спутник А, который должен обладать возможностями осуществления различных орбитальных маневров после отделения от ракеты-носителя для достижения своей конечной орбиты, оборудован соответственно бортовым компьютером 211, связанным с задающим генератором 212 и средствами обработки информации 213, снабженными запоминающими устройствами и обеспечивающими возможность определения астрономических эфемеридов, что необходимо для осуществления автономного управления спутником.
Спутник оборудован также системой создания тяги, которая может использовать двигатели, работающие на химическом топливе, или электрические реактивные двигатели. На фиг.2 представлен случай, когда спутник А содержит обе упомянутых выше системы создания реактивной тяги.
Таким образом, корпус спутника 200 содержит по меньшей мере один резервуар с запасом ксенона 201, обеспечивающий посредством специальной системы, содержащей устройство расширения, фильтр и электроклапаны (эта система в целом обозначена на фиг.2 позицией 202), питание по меньшей мере двух электрических реактивных двигателей 203, которые могут представлять собой ионные двигатели, двигатели с замкнутым дрейфом электронов или электродуговые реактивные двигатели.
Питание этих электрических реактивных двигателей электрической мощностью обеспечивается при помощи по меньшей мере одной панели солнечных батарей 204, обеспечивающей электрическое питание спутника через штангу 215 и механизм поворота 205. Для обеспечения атмосферного торможения спутника путем многократных проходов через верхние слои атмосферы предпочтительно иметь на этом спутнике две панели солнечных батарей, расположенных симметрично по отношению к его корпусу.
В предпочтительном варианте реализации спутник может быть оборудован двумя лазерными уголковыми отражателями 207, располагающимися на двух противоположных сторонах его корпуса и позволяющими обеспечить весьма точное определение расстояния от данного спутника до Земли, либо расстояние от этого спутника до Луны, на поверхности которой размещены лазерные уголковые отражатели, предназначенные для космических экспериментов (например, проекты АПОЛЛО и ЛУНОХОД), что позволяет очень точно визировать коридор входа в зону интенсивного атмосферного торможения.
Кроме того, спутник может быть оборудован системой создания реактивной тяги с использованием двигателей, работающих на химическом топливе (например, с использованием двигателей, работающих на гидразине или двузкомпонентном топливе), содержащей по меньшей мере один реактивный двигатель 208, тяга которого (обычно имеющая величину в несколько сотен ньютонов) позволяет реализовать практически импульсные приращения скорости, один или несколько резервуаров хранения реактивного топлива 209 и реактивные двигатели управления пространственной ориентацией 210 спутника, связанные с гироскопическими датчиками угловых скоростей.
Кроме того, спутник содержит датчик земной ориентации 206 с изменяемым полем обзора и по меньшей мере один датчик ориентации на Солнце (небесное светило) 214, которые выдают в бортовой компьютер две угловые координаты.
Датчик ориентации 214 на небесное светило и датчик земной ориентации 206 с изменяемым полем обзора связаны соответствующим образом с таблицей эфемеридов, заложенной в бортовом компьютере 211, который обеспечивает возможность расчета углов между вектором тяги системы создания реактивной тяги спутника и направлениями от спутника на Землю и от спутника на Солнце, то есть возможность определения пространственной ориентации спутника А в процессе выполнения орбитальных маневров.
Гироскопические датчики угловых скоростей контролируют реактивные двигатели управления пространственной ориентации 210, которые обеспечивают повороты корпуса второго спутника для того, чтобы обеспечить ориентацию главного двигателя 208 коррекции орбиты в заданном направлении.
Бортовой компьютер 211 обеспечивает одновременный контроль и управление двумя системами создания тяги.
В том, что касается системы создания тяги при помощи электрических ракетных двигателей, в соответствии с первым возможным способом реализации предлагаемого изобретения датчик земного горизонта с изменяемым полем обзора 206 позволяет получить направление на Землю, и специальные маховики обеспечивают пространственную ориентацию спутника А. Бортовой компьютер 211 использует закон управления электрическими ракетными двигателями 203, который заключается в стабилизации вектора тяги в направлении, перпендикулярном направлению спутник - Земля.
В соответствии с другим возможным способом реализации предлагаемого изобретения датчик 214 небесного тела и таблица эфемеридов, заложенная в бортовом компьютере 211, обеспечивают возможность определения пространственного положения спутника А. Маховики обеспечивают поддержание заданного пространственного положения спутника. Бортовой компьютер 211 использует закон управления электрическими ракетными двигателями, который заключается в ориентировании вектора тяги в инерциальном направлении.
Способ в соответствии с предлагаемым изобретением позволяет ценой умеренного приращения скорости, которое может быть обеспечено при помощи относительно маломощной системы создания реактивной тяги, установленной на борту подлежащего выведению на заданную орбиту спутника, реализовать изменения орбитальных плоскостей, которые не могли бы быть непосредственно реализованы при помощи систем создания тяги с использованием двигателей, работающих на химическом топливе, при использовании обычных способов перехода на другую орбиту, принимая во внимание необходимость ограничения бортовой массы спутника.
В приведенной в конце описания таблице указаны выраженные в километрах в секунду (км/с) приращения скорости, необходимые для, с одной стороны, орбитального перехода классического типа, а, с другой стороны, для орбитального перехода с использованием способа в соответствии с предлагаемым изобретением в различных примерах изменения орбит, плоскости которых не совпадают.
Первый пример применения данного изобретения был описан выше, показывая переход спутника с геостационарной орбиты на низкую круговую наклоненную орбиту.
В этом случае первый спутник В выводится на орбиту GTO или на переходную суперсинхронную орбиту 15. Второй спутник А выводится на суперсинхронную орбиту ожидания 12бис, которая имеет достаточно большую высоту апогея 19. Наклонение этой орбиты корректируется в апогее 19.
Коррекция траектории в зоне 5б позволяет довести высоту перигея до величины в диапазоне от 80 км до 160 км. При этом высота апогея 19а, 19б уменьшается в результате последовательных проходов спутника через верхние слои атмосферы и орбита постепенно становится круговой.
Способ в соответствии с предлагаемым изобретением позволяет не только использовать одну ракету-носитель для выведения на орбиту двух различных спутников, занимающих в конечном счете не являющиеся копланарными орбиты, но позволяет также выводить на орбиту кроме спутника В, выводимого на геостационарную орбиту, группу спутников А, С, D, выводимых одновременно на орбиты с различными наклонениями.
В этом случае спутники А, С, D выводятся на орбиту GTO 12бис или на строго экваториальную суперсинхронную переходную орбиту. Коррекция траектории на маршевом участке в зоне 5с, выполняемая раздельно на каждом спутнике А, С, D, позволяет иметь в виду для каждого спутника различное изменение наклонения орбиты в зоне 5а. Вторая коррекция траектории на маршевом участке в зоне 5б (на противоположной или обратной половине орбиты) позволяет откорректировать высоту каждого перигея. Орбита в этом случае постепенно приближается к круговой в результате торможения в верхних слоях атмосферы и корректирующего импульса, как в предыдущем случае.
Предлагаемое изобретение позволяет также вывести совокупность спутников А, С, D на орбиты одинакового наклонения, но с различными периодами обращения.
Эти спутники А, С, D выводятся на слегка отличные друг от друга суперсинхронные орбиты 12бис посредством очень небольших приращений скорости.
Коррекция наклонения орбиты в зоне 5а является одинаковой для всех спутников, но различия в периодах обращения (небольшие в относительных величинах, но могущие составлять до нескольких часов по абсолютной величине) будут приводить к различным временам прохождения перигея (предполагаемого строго экваториальным), что приведет к различным периодам после атмосферного торможения.
В случае использования теплозащитного экрана 216 этот метод позволяет обеспечить очень быстрое выведение на орбиту группы спутников (в случае использования классических методов с помощью дифференциальной прецессии на это требуется более месяца).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫВЕДЕНИЯ НЕСКОЛЬКИХ СПУТНИКОВ НА НЕКОМПЛАНАРНЫЕ ОРБИТЫ С ИСПОЛЬЗОВАНИЕМ СИЛЫ ЛУННОГО ПРИТЯЖЕНИЯ | 1997 |
|
RU2219109C2 |
| СПОСОБ И СИСТЕМА ВЫВЕДЕНИЯ НА ЗАДАННУЮ ОРБИТУ КОСМИЧЕСКОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ДВИГАТЕЛЕЙ, ОБЛАДАЮЩИХ БОЛЬШИМ УДЕЛЬНЫМ ИМПУЛЬСОМ | 1997 |
|
RU2212363C2 |
| СПОСОБ ОДНОВРЕМЕННОГО ВЫВЕДЕНИЯ ГРУППЫ СПУТНИКОВ НА НЕКОМПЛАНАРНЫЕ ОРБИТЫ (ВАРИАНТЫ) | 2015 |
|
RU2583507C1 |
| СПОСОБ ВЫВЕДЕНИЯ КОСМИЧЕСКОГО АППАРАТА НА ГЕОСТАЦИОНАРНУЮ ОРБИТУ С ПОМОЩЬЮ ЭЛЕКТРОРЕАКТИВНЫХ ДВИГАТЕЛЕЙ | 2015 |
|
RU2619486C2 |
| Способ обслуживания системы спутников на околокруговых орбитах и космическая обслуживающая система для осуществления способа | 2022 |
|
RU2772498C1 |
| СПОСОБ ВЫВЕДЕНИЯ КОСМИЧЕСКИХ АППАРАТОВ НА ОРБИТУ | 2023 |
|
RU2794486C1 |
| СПОСОБ ВЫВЕДЕНИЯ КОСМИЧЕСКОГО АППАРАТА НА ГЕОСТАЦИОНАРНУЮ ОРБИТУ С ИСПОЛЬЗОВАНИЕМ ДВИГАТЕЛЕЙ МАЛОЙ ТЯГИ | 2014 |
|
RU2586945C2 |
| Способ обслуживания космических объектов на орбитах различного наклонения и высокоорбитальная космическая инфраструктура для реализации способа | 2022 |
|
RU2775039C1 |
| Космическая инфраструктура для обслуживания космических объектов на геостационарной и более низких орбитах, а также способ обслуживания космических объектов посредством данной инфраструктуры | 2022 |
|
RU2776887C1 |
| УСОВЕРШЕНСТВОВАННЫЕ СИСТЕМА И СПОСОБ ОРГАНИЗАЦИИ СИСТЕМЫ НЕГЕОСТАЦИОНАРНЫХ СПУТНИКОВ, НЕ СОЗДАЮЩИХ ПОМЕХ В РАБОТЕ СПУТНИКОВ, НАХОДЯЩИХСЯ НА ГЕОСТАЦИОНАРНОМ КОЛЬЦЕ | 2001 |
|
RU2278472C2 |

Изобретение относится к способам осуществления межорбитальных маневров искусственных спутников, одновременно выводимых на орбиты одной ракетой-носителем. Предлагаемый способ состоит в выведении первого спутника на конечную орбиту (15). Второй спутник, размещенный на той же ракете-носителе, вначале переводится на сильно вытянутую орбиту ожидания (12бис), большая полуось которой располагается в исходной орбитальной плоскости. Затем в апогее (19) этой орбиты осуществляют изменение ее наклонения и перигея для того, чтобы вывести второй спутник на промежуточную орбиту (14). После этого проводят орбитальный маневр, использующий одно или более атмосферных торможений в окрестности перигея (6а, 6б) промежуточной орбиты. В результате уменьшается высота апогея (19, 19а, 196, 19с) каждой из промежуточных орбит (14, 14а, 14б, 14с). В окрестности апогея (19с) промежуточной орбиты (14с) сообщают второму спутнику импульс скорости так, чтобы поднять высоту перигея и преобразовать орбиту (14с) в конечную орбиту (11). Орбитальные параметры данной орбиты (11) существенно отличаются от таковых для конечной орбиты (15) первого спутника. Для выполнения орбитальных маневров и ориентации используют химические и/или электроракетные двигатели на спутниках, а также маховики (гироскопы). Изобретение направлено на повышение экономичности группового выведения спутников на некомпланарные орбиты. 16 з.п.ф-лы, 3 ил., 1 табл.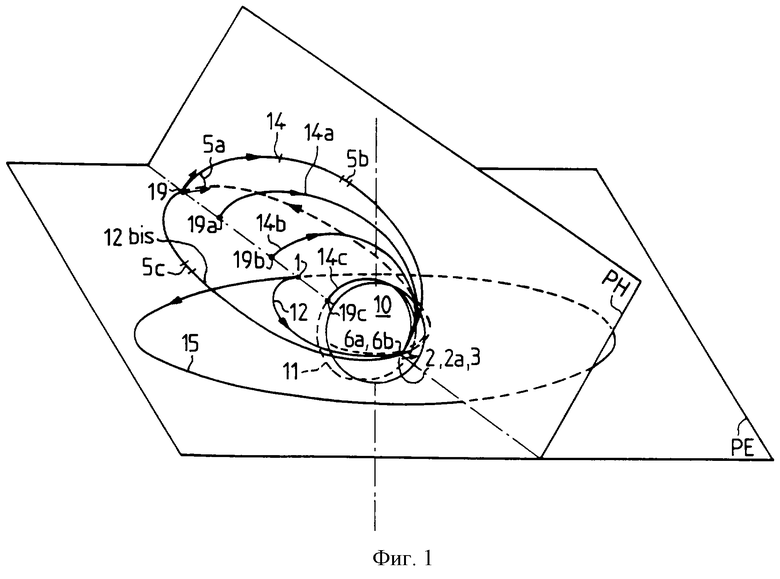
| US 5178347 А, 12.01.1993 | |||
| US 5108050 А, 28.04.1992 | |||
| US 5312073 А, 17.05.1994 | |||
| КОСМИЧЕСКИЙ ГИПЕРЗВУКОВОЙ КОМПЛЕКС | 1976 |
|
SU1826442A1 |
| ЛЕВАНТОВСКИЙ В.И | |||
| Механика космического полета в элементарном изложении | |||
| - М.: Наука, 1970, с.346. | |||

