Изобретение относится к акустике океана, а именно к гидроакустическим измерениям рассеяния звука в океанической среде.
Определение коэффициента объемного рассеяния необходимо для прогноза морской реверберации, являющейся одним из основных видов помех работе активных гидроакустических средств. В зависимости от неоднородностей, вызывающих рассеяние звука, различают объемную, поверхностную и донную реверберации. В настоящем техническом решении рассматривается только определение коэффициента объемного рассеяния звука, характеризующего объемную реверберацию.
Все известные способы определения коэффициента объемного рассеяния в глубоком море включают излучение звука с помощью остронаправленного излучателя, наклоненного вниз от поверхности воды, прием послезвучания (объемной реверберации) на отрезке времени от окончания импульсной посылки до прихода донной реверберации и определение по соотношению между интенсивностью излученной посылки и интенсивностью принятого послезвучания с учетом спада уровня реверберации, пропорционального расстоянию во второй степени, коэффициента объемного рассеивания [1] . Эти данные необходимы для оценки объемной реверберации, что, в свою очередь, необходимо для прогноза дальности действия и выбора оптимальных параметров гидролокатора подводного аппарата.
В качестве наиболее близкого технического решения выбран способ, который включает излучение звука и прием рассеянного поля с помощью приемника, располагаемого рядом с излучателем, измерение по многим реализациям средней величины квадрата амплитуды давления послезвучания  , являющегося мерой средней мощности W, рассеиваемой элементом среды в единицу телесного угла в локационном направлении, где
, являющегося мерой средней мощности W, рассеиваемой элементом среды в единицу телесного угла в локационном направлении, где
W=  R2, где ρc - акустическое сопротивление среды;
R2, где ρc - акустическое сопротивление среды;
R - расстояние, и определение коэффициента обратного объема рассеивания как отношения мощности W, рассеянной статистически однородным объемом V, к произведению интенсивность звука I, падающего на рассеивающий объем V:
mоб=  , после чего в предположении, что малые рассеивания, вычисляют коэффициент объемного рассеивания
, после чего в предположении, что малые рассеивания, вычисляют коэффициент объемного рассеивания
αоб= 4 π mоб, имеющий размерность длины в минус первой степени (м-1). Коэффициент объемного рассеивания, характеризующий мощность, рассеиваемую единичным объемом среды, понимается как среднее по многим неперекрывающимся объемам, выделенным в статистически однородной среде, при размерах этих объемов существенно больше радиуса пространственной корреляции неоднородностей [2] .
Недостатками известного технического решения являются необходимость использования активных акустических посылок, демаскирующих выполняемые измерения, необходимость набора данных по большому ансамблю наблюдений, сложная статистическая обработка в предположении убывания интенсивности пропорционально квадрату расстояния с усреднением результатов по большому количеству активных посылок.
Целью изобретения является определение коэффициента объемного рассеяния без активного излучения гидроакустическими средствами, т. е. в пассивном режиме без демаскирования подводного аппарата.
Поставленная задача решается следующим образом. По способу определения коэффициента объемного рассеяния звука, включающему направленный прием рассеянного звукового поля приемным трактом, установленным на погруженном подводном движущемся аппарате, в качестве рассеянного звукового поля используют шумы моря при волнении два балла и более, выполняют два вида пространственной фильтрации принятых шумов моря одновременно посредством тракта с остронаправленной антенной, формируя характеристику направленности с раствором главного максимума, меньшим угла рефракционного минимума шумов моря в вертикальной плоскости, расположенным в пределах этого угла, и добавочными, максимумами при которых принятая энергия шумов по крайней мере в десять раз меньше энергии шума моря, принятого в пределах главного максимума, а также приемным трактом со слабонаправленной антенной, формируя характеристику направленности, близкую к полусфере с осью, направленной вперед по направлению движения аппарата в горизонтальной плоскости, и измеряют на выходах трактов с остронаправленной и слабонаправленной антенной средние квадраты электрических напряжений  и
и  соответственно, предварительно с помощью тех же трактов производят прием шумов подводного аппарата на скоростях его движения тех же, что при приеме шумов моря и при волнении моря менее 1 балла и измеряют квадрат электрического напряжения на выходе трактов с остронаправленной и слабонаправленной антенной
соответственно, предварительно с помощью тех же трактов производят прием шумов подводного аппарата на скоростях его движения тех же, что при приеме шумов моря и при волнении моря менее 1 балла и измеряют квадрат электрического напряжения на выходе трактов с остронаправленной и слабонаправленной антенной  и
и  , а коэффициент объемного рассеяния определяют по формуле
, а коэффициент объемного рассеяния определяют по формуле
αоб=  ·
·  -1
-1 , (1) где β - коэффициент затухания звука в океанической среде, табулированный для данной акватории; Кпр, Кпс, γпр, γпс - коэффициенты концентрации и чувствительности трактов с остронаправленной и слабонаправленной антенной соответственно.
, (1) где β - коэффициент затухания звука в океанической среде, табулированный для данной акватории; Кпр, Кпс, γпр, γпс - коэффициенты концентрации и чувствительности трактов с остронаправленной и слабонаправленной антенной соответственно.
Прием шумов моря производят в интервалах времени Т, ограниченных неравенством ≪ T<Tст, (2) где εcл - требуемая средняя квадратическая погрешность определения шумов моря; Тст - минимальный интервал времени, на котором шум моря является стационарным; ΔF - полоса частот, в которой определяют коэффициент объемного рассеяния.
≪ T<Tст, (2) где εcл - требуемая средняя квадратическая погрешность определения шумов моря; Тст - минимальный интервал времени, на котором шум моря является стационарным; ΔF - полоса частот, в которой определяют коэффициент объемного рассеяния.
Решение задачи достигается за счет использования в качестве рассеянного звукового поля шумов морской среды, несущих информацию об объемных рассеивателях в море и идентификации этой информации.
Для обоснования причинно-следственных связей между существенными признаками и конечным результатом решения задачи по пассивному определению коэффициента объемного рассеивания приведено теоретическое обоснование предлагаемого способа.
Анизотропия шумового поля океана в вертикальной плоскости имеет рефракционный минимум при углах, близких к горизонту, обусловленный тем, что при углах, меньших θ1 и θ2 , динамические шумы поверхности моря, переотраженные от дна моря, не поступают на приемник из-за рефракции лучей, где θ1 и θ2 - углы рефракционных минимумов шумов моря; θ1 в верхней полу плоскости, θ2 в нижней.
Однако полного нуля в области рефракционного минимума не наблюдается, что обусловлено рассеянием звука на объемных неоднородностях в толще моря. Отношение лучевой интенсивности I рассеянного шума к лучевой интенсивности Iэкв изотропного поля шумов моря, эквивалентного анизотропному, может быть записано в виде
 , (3) что позволяет извлечь информацию о коэффициенте объемного рассеивания αоб.
, (3) что позволяет извлечь информацию о коэффициенте объемного рассеивания αоб.
Для определения лучевой интенсивности I необходимо отфильтровать шумы в области рефракционного минимума. Для этого необходимо применять направленную антенну с главным максимумом в вертикальной плоскости, не превышающим угол θ0= θ1+θ2. Меньшая ширина главного максимума может быть использована, так как в пределах угла θ0 шум практически изотропен. Большая ширина недопустима, так как затрагивает области в вертикальной плоскости, в которых шум моря обусловлен нерассеиванием на объемным неоднородностях. Необходимый эффект достигается только при малых добавочных максимумах характеристики направленности приемной антенны. Уточним понятие малых добавочных максимумов. Условием можно считать (360°-θ0)δR ≪
(360°-θ0)δR ≪  , где δ R - средний уровень ореола добавочных максимумов.
, где δ R - средний уровень ореола добавочных максимумов.
Заменяя неравенство равенством с коэффициентом три, находим, что средний уровень ореола не должен превышать в вертикальной плоскости
δR= 
 .
.
На практике θ0 30о, I/Iэкв
30о, I/Iэкв 0,1, что требует среднего уровня добавочных максимумов меньше одного процента, что технически достижимо.
0,1, что требует среднего уровня добавочных максимумов меньше одного процента, что технически достижимо.
Далее следует измерить квадрат электрического напряжения  на выходе такта с остронаправленной антенной и определить лучевую интенсивность рассеянного шума моря с учетом коэффициента концентрации этого тракта Кпр, чувствительности γкр и компенсации помех корабельного происхождения Uок по формуле
на выходе такта с остронаправленной антенной и определить лучевую интенсивность рассеянного шума моря с учетом коэффициента концентрации этого тракта Кпр, чувствительности γкр и компенсации помех корабельного происхождения Uок по формуле
I= 
 (4) где ρc - среднее акустическое сопротивление морской среды.
(4) где ρc - среднее акустическое сопротивление морской среды.
Для определения Iэкв необходимо осуществить всенаправленный прием шумов моря. Для этого используется примерно полусферическая характеристика направленности. Проведенное математическое моделирование показало, что для малонаправленного приема с коэффициентом концентрации от двух до трех и при главном максимуме характеристики направленности, ориентированном в горизонтальном направлении, коэффициент концентрации Кnс(t) совпадает с коэффициентом помехоустойчивости в анизотропном поле шумов моря с точностью до 5-7% . Это позволяет использовать коэффициент концентрации для определения Iэкв. После измерения напряжения на выходе этого приемного тракта и компенсации помехи от шумов объектов появляется возможность определить эквивалентную лучевую интенсивность шумов моря как
Iэкв= 
 , (5) где Uоок, Кnс, γnc - соответственно уровень корабельных помех на выходе тракта, коэффициент концентрации и чувствительность. Коэффициент объемного рассеяния αоб получают подстановкой в формулу (2) выражений (4) и (5).
, (5) где Uоок, Кnс, γnc - соответственно уровень корабельных помех на выходе тракта, коэффициент концентрации и чувствительность. Коэффициент объемного рассеяния αоб получают подстановкой в формулу (2) выражений (4) и (5).
Прием шумов моря целесообразно производить при
εсл=  , причем Т не может быть меньше (при заданном εcл.) величины
, причем Т не может быть меньше (при заданном εcл.) величины
T=  , где εcл - требуемая средняя квадратическая погрешность определения шумов моря.
, где εcл - требуемая средняя квадратическая погрешность определения шумов моря.
Однако значение Т нельзя увеличивать более нижнего предела стационарности шума моря Тст, обычно составляющего 2-3 мин для частот, традиционных для гидролокации.
Для определения величины лучевой интенсивности рассеянного шума моря необходимо осуществить прием шума моря, поступающего в пределах углов рефракционного минимума. Для этого нужно определить углы этого минимума, для чего определяют скорости звука у поверхности сп и дна моря сд и на глубине погружения аппарата со. После этого пределы рефракционного минимума могут быть найдены по формулам
θ0= θ1+θ2, где
θ1= arccos ;
;
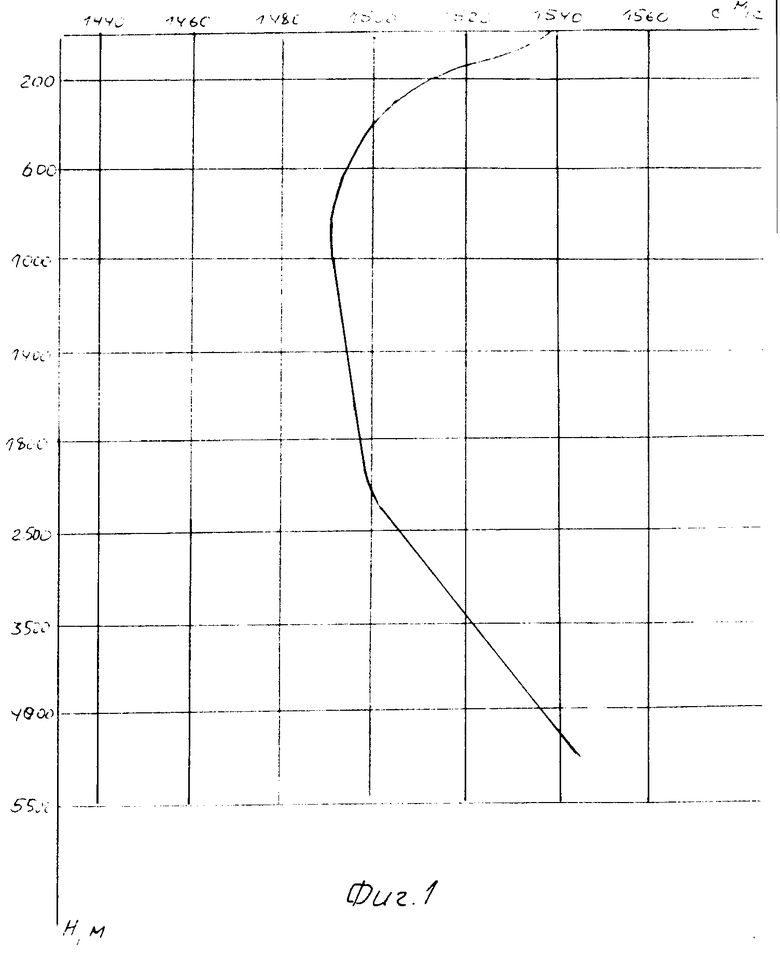
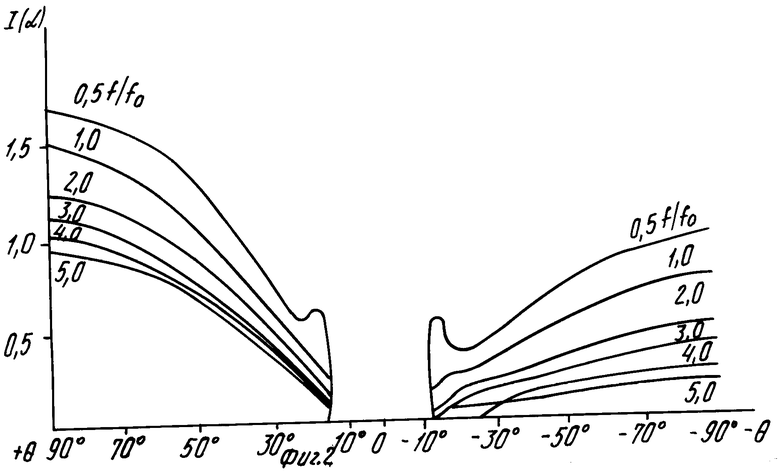
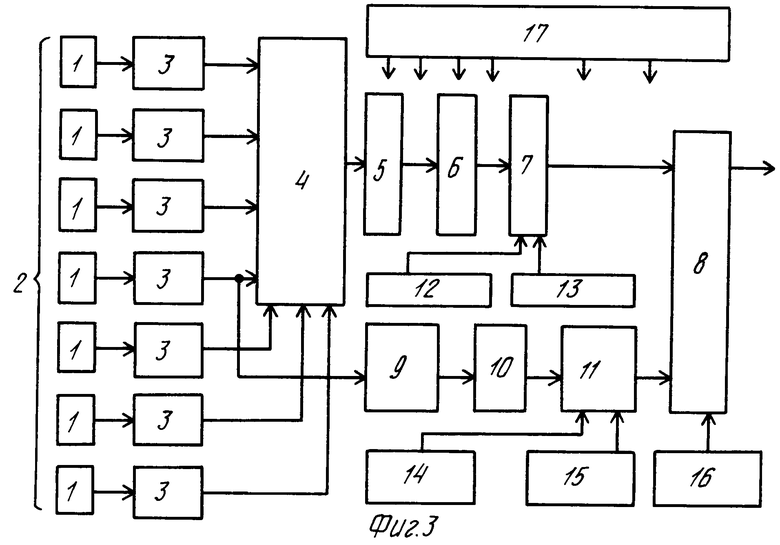
θ2= arccos . На фиг. 1 показано распределение скоростей; на фиг. 2 - расчетное пространственное распределение интенсивности динамического шума моря в вертикальной плоскости (без учета объемного рассеивания в области рефракционного минимума): угол θ отсчитывается от горизонта, fо= 1 кГц; на фиг. 3 - устройство для реализации способа, где 1 - электроакустический преобразователь, 2 - гидроакустическая антенна из n электроакустических преобразователей-приемников звука, 3 - n предварительных усилителей и фильтров, ограничивающих полосу Δ F, 4 - формирователь характеристики направленности, 5 - первый аналого-цифровой преобразователь (АЦП), 6 - вычислитель
. На фиг. 1 показано распределение скоростей; на фиг. 2 - расчетное пространственное распределение интенсивности динамического шума моря в вертикальной плоскости (без учета объемного рассеивания в области рефракционного минимума): угол θ отсчитывается от горизонта, fо= 1 кГц; на фиг. 3 - устройство для реализации способа, где 1 - электроакустический преобразователь, 2 - гидроакустическая антенна из n электроакустических преобразователей-приемников звука, 3 - n предварительных усилителей и фильтров, ограничивающих полосу Δ F, 4 - формирователь характеристики направленности, 5 - первый аналого-цифровой преобразователь (АЦП), 6 - вычислитель  - среднего квадрата напряжения на выходе формирователя характеристики направленности, 7 - вычислитель лучевой интенсивности I, 8 - вычислитель коэффициента объемного рассеивания αоб, 9 - второй АЦП, 10 - вычислитель
- среднего квадрата напряжения на выходе формирователя характеристики направленности, 7 - вычислитель лучевой интенсивности I, 8 - вычислитель коэффициента объемного рассеивания αоб, 9 - второй АЦП, 10 - вычислитель  - среднего квадрата напряжения на выходе приемного тракта с полусферической характеристикой направленности, 11 - вычислитель Iэкв - эквивалентной лучевой интенсивности, 12 - блок памяти помех аппарата-носителя гидролокатора -
- среднего квадрата напряжения на выходе приемного тракта с полусферической характеристикой направленности, 11 - вычислитель Iэкв - эквивалентной лучевой интенсивности, 12 - блок памяти помех аппарата-носителя гидролокатора -  на выходе приемного остронаправленного тракта, 13 - блок памяти параметра антенны, отнесенного к акустическому сопротивлению среды, Кпр/γпр2 4 πρc , 14 - блок памяти среднего квадрата напряжения
на выходе приемного остронаправленного тракта, 13 - блок памяти параметра антенны, отнесенного к акустическому сопротивлению среды, Кпр/γпр2 4 πρc , 14 - блок памяти среднего квадрата напряжения  помех аппарата-носителя гидролокатора на выходе приемного тракта с полусферической характеристикой направленности, 15 - блок памяти параметра приемника с полусферической характеристикой направленности, отнесенного к акустическому сопротивлению среды
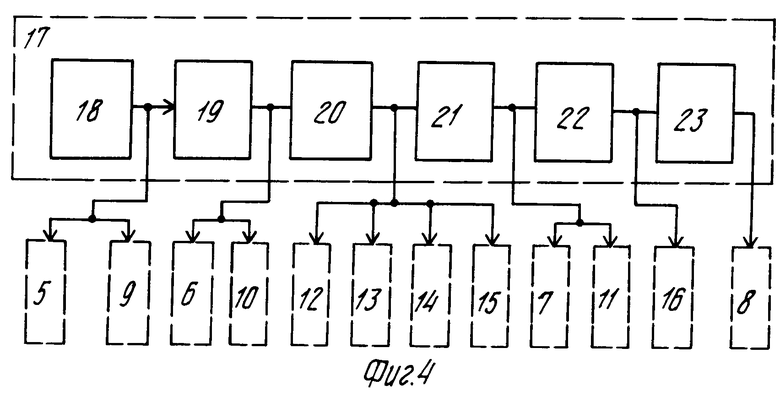
помех аппарата-носителя гидролокатора на выходе приемного тракта с полусферической характеристикой направленности, 15 - блок памяти параметра приемника с полусферической характеристикой направленности, отнесенного к акустическому сопротивлению среды  , 16 - блок памяти затухания звука в морской среде, 17 - блок управления устройством определения αоб (на фиг. 3 для упрощения графика не показаны синхросвязи блока 17 управления с блоками устройства, в качестве слабонаправленной антенны используются один (на схеме четвертый) электроакустический преобразователь антенны); на фиг. 4 приведена блок-схема 17 управления, где 18 - генератор тактовых сигналов, 9, 20, 21, 22, 23 - соответственно первая, вторая, третья, четвертая, пятая линии задержки (цифры у выходов блока 17 следует считать связями).
, 16 - блок памяти затухания звука в морской среде, 17 - блок управления устройством определения αоб (на фиг. 3 для упрощения графика не показаны синхросвязи блока 17 управления с блоками устройства, в качестве слабонаправленной антенны используются один (на схеме четвертый) электроакустический преобразователь антенны); на фиг. 4 приведена блок-схема 17 управления, где 18 - генератор тактовых сигналов, 9, 20, 21, 22, 23 - соответственно первая, вторая, третья, четвертая, пятая линии задержки (цифры у выходов блока 17 следует считать связями).
П р и м е р. На подводном аппарате, оснащенном гидролокатором, необходимо произвести измерение дистанции до цели, обнаруженной в режиме шумопеленгования. Для прогноза дальности действия гидролокатора возникла необходимость оценить объемную реверберацию, интенсивность которой на выходе приемного устройства описывается выражением
Iоб=  e
e , (6) где Ра - акустическая мощность излучателя;
, (6) где Ра - акустическая мощность излучателя;
с - скорость звука;
τ- продолжительность импульса;
ηo- коэффициент, учитывающий влияние направленных свойств излучающей и приемной антенн на интенсивность реверберации.
В формуле (6) все параметры: акустическая мощность излучателя Ра, коэффициент направленности ηo, километрическое затухание звука β, скорость звука с, длительность импульса τ, расстояние R заведомо известны. Необходимо только определить коэффициент объемного рассеяния αоб.
В соответствии с предлагаемым способом измерено вертикальное распределение скорости звука с помощью скоростомера (фиг. 1). Было определено, что при глубине погружения аппарата-носителя гидролокатора 200 м, значение угла рефракионного минимума составляет θo = 30о (от 75 до 105о относительно направления на поверхность). Расчетные пространственные спектры без учета объемного рассеивания приведены на фиг. 2. Производился прием шума моря в полосе частот Δ F= 100 Гц в течение интервалов времени Т= 60с. Выбор интервала Т сделан, исходя из неравенства (3) из заданного значения εсл= 1% . Была сформирована характеристика направленности приемной антенны с раствором 5о на средней частоте работы гидролокатора fо= 1200 Гц при расположении главного максимума характеристики направленности по горизонту. На выходе этого тракта измерялся средний квадрат напряжения, по формуле (4) была определена I. Предварительно были измерены помехи  и
и  , обусловленные движением и жизнеобитанием подводного аппарата. В соответствии с руководствами по нормированию и контролю этих помех измерения осуществлялись при волнении моря менее 1 балла, при удалении от берега не менее 30 миль в акватории с илистым грунтом глубиной не менее 200 м. Эти помехи определяются для разных скоростей хода аппарата. Одновременно формировалась характеристика направленности, близкая к полусфере (использовался один приемный элемент антенны), и была определена Iэкв по формуле (5). По формуле (1) было найдено, что коэффициент объемной реверберации
, обусловленные движением и жизнеобитанием подводного аппарата. В соответствии с руководствами по нормированию и контролю этих помех измерения осуществлялись при волнении моря менее 1 балла, при удалении от берега не менее 30 миль в акватории с илистым грунтом глубиной не менее 200 м. Эти помехи определяются для разных скоростей хода аппарата. Одновременно формировалась характеристика направленности, близкая к полусфере (использовался один приемный элемент антенны), и была определена Iэкв по формуле (5). По формуле (1) было найдено, что коэффициент объемной реверберации
αоб= 10-8 1/м.
Измерительные тракты предварительно были отградуированы по чувствительности методом сравнения с рабочим гидрофоном. Кроме того, были измерены характеристики направленности и по ним графическим методом определены значения коэффициентов концентрации.
Анализ погрешности показал, что случайная составляющая погрешности εсл при выбранном усреднении Т= 60 с пренебрежимо мала:
εсл= 
 1,5% , методические погрешности обусловлены принятыми предположениями о неизменности уровня помех от шумов аппарата, предположением о сферической индикатрисе рассеивания. Они характерны и для способа-прототипа и не превышают εм= 8% .
1,5% , методические погрешности обусловлены принятыми предположениями о неизменности уровня помех от шумов аппарата, предположением о сферической индикатрисе рассеивания. Они характерны и для способа-прототипа и не превышают εм= 8% .
Кроме того, оценивались и погрешности εуи из-за изменения условий измерений, в частности при внезапном набеге шквала суммарная погрешность
εΣ=  16% .
16% .
Сопоставление определения αоб по предлагаемому способу и по способу-прототипу показали удовлетворительное совпадение (20% ).
Таким образом, предлагаемый способ практически реализуем.
Реализация способа осуществлялась с помощью устройства, блок-схема которого приведена на фиг. 3. Устройство содержит параллельно-последовательно соединенные гидроакустическую антенну 2, состоящую из n электроакустических преобразователей 1, блок 3 предварительных усилителей и фильтров, блок 4 формирования характеристики направленности, первый АЦП 5, вычислитель 6  , вычислитель 7 I, вычислитель 8, а также содержит последовательно соединенные второй АЦП 9, вход которого соединен с выходом предварительного усилителя центрального в антенне электроакустического преобразователя, вычислитель 10
, вычислитель 7 I, вычислитель 8, а также содержит последовательно соединенные второй АЦП 9, вход которого соединен с выходом предварительного усилителя центрального в антенне электроакустического преобразователя, вычислитель 10  , вычислитель 11 Iэкв, выход которого соединен с вторым входом вычислителя 8 αоб. Кроме того, устройство содержит блок 12 памяти
, вычислитель 11 Iэкв, выход которого соединен с вторым входом вычислителя 8 αоб. Кроме того, устройство содержит блок 12 памяти  и блок 13 памяти
и блок 13 памяти  , выходы которых соединены соответственно с вторым и третьим входами вычислителя 7, блок 14 памяти
, выходы которых соединены соответственно с вторым и третьим входами вычислителя 7, блок 14 памяти  и блок 15 памяти
и блок 15 памяти  , выходы которых соединены соответственно с вторым и третьим входами вычислителя 11 Iэкв, блок 16 памяти β, выход которого соединен с третьим входом вычислителя αоб, а также блок 17 управления, синхровходы которого соединены соответственно с синхровходами АЦП 5 и 9, вычислителей 6 и 10, блоков 12 и 13 и 14 и 15, вычислителей 7 и 11, блока 16, вычислителя 8.
, выходы которых соединены соответственно с вторым и третьим входами вычислителя 11 Iэкв, блок 16 памяти β, выход которого соединен с третьим входом вычислителя αоб, а также блок 17 управления, синхровходы которого соединены соответственно с синхровходами АЦП 5 и 9, вычислителей 6 и 10, блоков 12 и 13 и 14 и 15, вычислителей 7 и 11, блока 16, вычислителя 8.
Блок 17 управления содержит последовательно соединенные генератор 18 пеленговых сигналов, синхровыход которого соединен с синхровходами АЦП 5 и 9, первую линию 19 задержки, синхровыход которой соединен с синхровходами вычислителей 6 и 10, вторую линию 20 задержки, синхровыход которой соединен с синхровходами блоков 12, 13, 14 и 15, третью линию 21 задержки, синхровыход которой соединен с синхровходами вычислителей 7 и 11, четвертую линию 22 задержки, синхровыход которой соединен с синхровходом блока 16, пятую линию 23 задержек, синхровыход которой соединен с синхровходом вычислителя 8.
Работает устройство следующим образом.
По результатам измерений помех аппарата-носителя гидролокатора по правилам руководства по контролю и нормированию шумности в блоки 12 и 14 памяти заносятся данные о помехах-шумах аппарата для разных скоростей хода. В блоки 13 и 15 памяти заносятся паспортные параметры градуировки приемных трактов, а также средние значения ρc для данной акватории. В блок 16 памяти заносятся табличные данные о затухании звука в море β. В вычислителе 7 формируется характеристика направленности с малым уровнем добавочных максимумов обычно за счет использования Чебышевского распределения. Раствор главного максимума располагается по горизонту. Он выбирается заведомо уже, чем угол рефракционного минимума θo. В вычислителях 6 и 10 дискретизованные значения преобразуются в  и
и  .
.
В вычислителях 7 и 11 с учетом данных блоков 12, 13, 14, 15 памяти вычисляются I и Iэкв. В вычислителе вычисляется αоб с учетом данных о I и Iэкв и значения β для средней частоты гидролокации. Блок 17 управления обеспечивает синхронизацию работы всего устройства. Данные об αоб подаются на блок прогнозирования дальности действия гидролокатора.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА РАССЕЯНИЯ АКУСТИЧЕСКИХ ВОЛН ДНОМ ОКЕАНА | 1992 |
|
RU2047222C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ МОРЯ НА ПОГРУЖЕННОМ АППАРАТЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2029439C1 |
| СПОСОБ ФОРМИРОВАНИЯ КОМПЕНСАЦИОННОЙ ДИАГРАММЫ НАПРАВЛЕННОСТИ В ПЛОСКОЙ АНТЕННОЙ РЕШЕТКЕ С ЭЛЕКТРОННЫМ УПРАВЛЕНИЕМ ЛУЧОМ | 2014 |
|
RU2567120C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОДВОДНОЙ ШУМНОСТИ КОРАБЛЯ-ЦЕЛИ | 1989 |
|
SU1840512A1 |
| ГИДРОАКУСТИЧЕСКИЙ ЗОНОГРАФ | 2001 |
|
RU2241964C2 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ФОРМЫ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ДИСКРЕТНЫХ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2326408C1 |
| СПОСОБ АКУСТИЧЕСКОГО МОНИТОРИНГА ИЗМЕНЧИВОСТИ ПАРАМЕТРОВ МОРСКИХ АКВАТОРИЙ | 1997 |
|
RU2134432C1 |
| СПОСОБ АКУСТОТЕРАПИИ | 1996 |
|
RU2145206C1 |
| СПОСОБ ИЗМЕРЕНИЯ СОБСТВЕННОГО ПОДВОДНОГО ШУМОИЗЛУЧЕНИЯ И ШУМОИЗМЕРИТЕЛЬ | 1989 |
|
SU1840603A1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЦЕЛЕЙ ОТ СЛУЧАЙНЫХ РЕВЕРБЕРАЦИОННЫХ ПОМЕХ | 2008 |
|
RU2365938C1 |
Изобретение относится к гидроакустике, а именно к области гидроакустических изменений рассеяния звука в океанической среде. Целью изобретения является определение коэффициента объемного рассеивания без активного излучения гидроакустическими средствами, т. е. в пассивном режиме. Цель достигается направленным приемом рассеянного звукового поля приемным трактом и дополнительным использованием в качестве рассеянного звукового поля шумов моря при волнении моря от 2 баллов и более, выполнением двух видов пространственной фильтрации принятых шумов моря одновременно посредством тракта с остронаправленной антенной, формируя характеристику направленности с раствором главного максимума, меньшим угла рефракционного минимума шумов моря в вертикальной плоскости, расположенным в этой плоскости в пределах этого угла, и добавочными максимумами, при которых принятая энергия шумов по крайней мере в десять раз меньше энергии шума моря, принятого в пределах главного максимума, а также приемным трактом со слабонаправленной антенной с характеристикой направленности, близкой к полусфере, с осью, направленной вперед по направлению движения аппарата в горизонтальной плоскости и измерением на выходах трактов с остронаправленной и слабонаправленной антеннами средних квадратов электрических напряжений  и
и  соответственно. Предварительно с помощью тех же трактов производят прием шумов подводного аппарата на скоростях его движения тех же, что при приеме шумов моря и волнении моря менее 1 балла и измеряют квадраты электрического напряжения на выходе трактов с остронаправленной и слабонаправленной антеннами
соответственно. Предварительно с помощью тех же трактов производят прием шумов подводного аппарата на скоростях его движения тех же, что при приеме шумов моря и волнении моря менее 1 балла и измеряют квадраты электрического напряжения на выходе трактов с остронаправленной и слабонаправленной антеннами  и
и  . Коэффициент объемного рассеяния определяют по приведенной формуле. Изобретение может быть реализовано с помощью устройства. 3 з. п. ф-лы, 4 ил.
. Коэффициент объемного рассеяния определяют по приведенной формуле. Изобретение может быть реализовано с помощью устройства. 3 з. п. ф-лы, 4 ил.
 и
и  соответственно, предварительно с помощью тех же трактов производят прием шумов подводного аппарата на скоростях его движения тех же, что и приеме шумов моря, и при волнении моря менее одного балла, и измеряют средние квадраты электрического напряжения на выходе трактов с остронаправленной и слабонаправленной антенной
соответственно, предварительно с помощью тех же трактов производят прием шумов подводного аппарата на скоростях его движения тех же, что и приеме шумов моря, и при волнении моря менее одного балла, и измеряют средние квадраты электрического напряжения на выходе трактов с остронаправленной и слабонаправленной антенной  и
и  соответственно, а коэффициент объемного рассеяния определяют по формуле
соответственно, а коэффициент объемного рассеяния определяют по формуле
λоб=  ·
·  -1
-1 ,
,
где β - коэффициент затухания звука в океанической среде, табулированный для данной акватории;
Kпp , Kпс , γпp , γпс- - коэффициент концентрации и чувствительность трактов с остронаправленной и слабонаправленной соответственно. ≅ T<Tст,
≅ T<Tст,
где εсл - требуемая средняя квадратическая погрешность определения шумов моря;
Tст - минимальный интервал времени, на котором шум моря является стационарным;
ΔF - полоса частот, которое определяют коэффициент объемного рассеяния. и
и  , ранее усредненных в интервале времени T, по ансамблю n реализации за время Tобщ = nТ.
, ранее усредненных в интервале времени T, по ансамблю n реализации за время Tобщ = nТ.
