Настоящее изобретение относится к области гидроакустики и может быть использовано для измерения глубины погружения объекта с использованием гидролокатора ближнего действия, установленного на движущемся носителе относительно горизонта движения носителя.
Известны методы обнаружения объекта, находящегося в близи подвижного носителя в водной среде, с использованием гидролокатора, установленного на этом носителе. Использование этих методов позволяют обнаруживать объект, измерять до него дистанцию и измерять направление на объект (Яковлев А.Н., Каблов Г.П. Гидролокаторы ближнего действия. Л., Судостроение, 1983 г.).
Этот способ содержит: излучение зондирующего сигнала, измерение времени задержки между излученным сигналом и принятым эхосигналом от объекта, определение дистанции до обнаруженного объекта по величине временной задержки и известной скорости распространения звука и определение направления прихода отраженного сигнала в горизонтальном направлении.
Однако способ не позволяют определить глубину погружения объекта. Известен метод определения глубины погружения цели с использованием гидролокатора, (А.П.Сташкевич, «Акустика океана», Судостроение, Ленинград, 1966 г., стр.263). Способ содержит измерение дистанции до цели и угла, определяемого направлением характеристики направленности в вертикальной плоскости.
Известен «Способ и устройство определения глубины подводного объекта» авторы SATO KAZUO и др. по патенту JP 02708109 В2 от 04.02.98 г. G01S 15\10 HITACYI LTD, который основан на том же принципе, что и предыдущий способ, но определение направления производится с использованием сканирования характеристики направленности в вертикальной плоскости при излучении зондирующего сигнала узкой характеристикой направленности.
Недостатком данных методов является то, что необходимо точно знать направление на цель, которая определяется с использованием узкой характеристики направленности (ХН) в вертикальной плоскости. Результатом оценки глубины для объекта является величина, которая получается при решении прямоугольного треугольника по гипотенузе, определяемой по оценке дистанции и углу, определяемому направлением характеристики направленности.
Такая процедура определения глубины погружения зависит от правильности получения оценки направления на цель, которая зависит от ширины характеристики направленности в вертикальной плоскости. Чем уже ХН, тем точнее можно определить направление на цель. Существующие системы обнаружения эхосигнала имеют узкую характеристику направленности в горизонтальной плоскости и широкую характеристику направленности в вертикальной плоскости. Ширина характеристики направленности в вертикальной плоскости является конечной величиной и составляет в существующих системах величину порядка 20° по уровню 0.7 от максимума, и, следовательно, ошибка определения угла будет иметь значение порядка 20°-25°, поскольку эхосигнал может быть принят не по центру характеристики направленности, а одним из ее краев. При этом суммарная ошибка определения глубины может достигать 50%. Кроме того, следует учесть, что даже если путем аппаратурных затрат удастся обеспечить узкую ХН в вертикальной плоскости, то обнаружение цели узкой характеристикой направленности существенно усложнится.
Сложность формирования узкой характеристики направленности в вертикальной плоскости и трудности обнаружения цели такой характеристикой направленности ограничивают возможности практического использования известного метода.
Наиболее близким аналогом является способ, изложенный в книге А.П.Сташкевича, «Акустика океана», который выбирается нами в качестве прототипа.
Способ содержит следующие операции:
излучение зондирующего сигнала в момент времени t1,
прием эхосигнала от объекта,
измерение временной задержки между моментами излучения зондирующего сигнала и приема эхосигнала,
определение на момент времени t1 дистанции D1 до объекта по величине временной задержки и известной скорости распространения звука,
измерение направления на цель в вертикальной плоскости;
определение глубины погружения по формуле Н=D Sin (α),
где D - измеренная дистанция до цели,
α - угол между направлением движения носителя и направлением на цель в вертикальной плоскости.
Указанные недостатки устраняются тем, что в известный способ, содержащий излучение зондирующего сигнала, прием эхосигнала и измерение дистанции D1 на момент времени t1, вводят дополнительные операции, а именно:
в момент времени t1+Δt повторяют процедуру измерения дистанции до объекта, определяют дистанцию D2 до объекта в момент времени t1+Δt,
определяют скорость движения носителя Vсоб;
и глубину погружения объекта относительно горизонта движения носителя определяют по формуле
 где
где
 где
где
D1 - дистанция до объекта в момент времени t1,
D2 - дистанция до объекта на момент времени t1+Δt,
hизл- глубина погружения излучателя,
V2 соб - скорость перемещения излучателя.
Техническим результатом предложенного способа является повышение точности измерения глубины погружения объекта относительно горизонта движения носителя и упрощение реализации способа.
Поясним достижения указанного технического результата.
В предлагаемом техническом решении используются оценки дистанции до обнаруженного объекта, полученные из двух точек, разнесенных на некоторое расстояние. Это расстояние может быть определено, если известна собственная скорость движения и интервал времени между излучением сигнала. Точность измерения собственной скорости на средних скоростях движения не превышает 0,2-0,5 узла. Отсюда следует, что точность измерения глубины погружения на дистанциях порядка 2-х километров будет находиться в пределах ±20% от измеряемой глубины. Кроме того, отсутствует необходимость формирования узкой характеристики направленности, проводить сканирование этой характеристики по вертикали и определять точное угловое положение объекта, что существенно упрощает реализацию способа.
Сущность изобретения поясняется фиг.1, на которой приведена блок-схема устройства, реализующего способ.
Устройство, реализующее данный способ, содержит гидролокатор 1 ближнего действия, соединенный через измеритель 2 дистанции с вычислителем 3, второй вход которого соединен с измерителем 4 собственной скорости, а третий вход - с блоком управления 5. Второй выход блока 5 соединен со входом гидролокатора 1, а третий выход с измерителем 2 дистанции.
С помощью предложенного устройства способ осуществляется следующим образом.
Гидролокатор 1 излучает зондирующие сигналы в момент времени t1, принимает отраженный от объекта эхосигнал, который поступает в измеритель 2 дистанции. В измерителе 2 по времени задержки между излученным сигналом и принятым сигналом и по известной скорости распространения звука определяют дистанцию до объекта D1. Измеренная оценка дистанции D1 в момент t1 поступает в вычислитель 3. Корабельным лагом-измерителем собственной скорости 4 измеряют скорость движения носителя, значение которой поступает на второй вход вычислителя 3. При излучении следующей посылки гидролокатором 1 производят последующее измерение дистанции в последующий момент времени, и определяется дистанция D2, соответствующая времени t1+Δt. По разности времен излучения Δt, измеренным оценкам дистанции D1 и D2 оценки собственной скорости V в вычислителе 3 определяют пройденный путь V Δt носителем гидролокатора 1 между посылками, решается система 2 уравнений


из которой можно получить оценку ΔD, знание которой позволяет вычислить искомую глубину погружения объекта локации относительно носителя:
где 
Точность измерения глубины погружения определяется временем измерения дистанции и точностью измерения собственной скорости движения носителя. Как правило, точность измерения дистанции определяется разрешающей способностью используемого зондирующего сигнала и составляет величину порядка 1-2 метров. Точность измерения собственной скорости на средних скоростях движения не превышает 0,2-0,5 узла. Отсюда следует, что точность измерения глубины погружения на дистанциях порядка 2 километров будет находиться в пределах ±20% от измеряемой глубины. Если глубина погружения объекта мала, то соотношения между D1 и D2 будут отличаться только на величину V Δt. Для гидролокаторов ближнего действия (освещения ближней обстановки) характерно использование сигналов короткой длительности либо сложных сигналов, обладающих хорошей разрешающей способностью по дистанции. Дальность действия гидролокатора ближнего действия ограничивается дистанциями нескольких километров. Как правило, на этих дистанциях многолучевое распространение не оказывает существенного влияния.
Таким образом, предложенный способ позволяет повысить точность измерения глубины объекта относительно горизонта движения носителя, на котором установлен гидролокатор, и упростить реализацию способа, поскольку никаких требований к ширине и точности формирования характеристики направленности гидроакустической антенны гидролокатора в вертикальной плоскости в этом способе не предъявляется. Это позволяет считать заявленный технический результат достигнутым.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ ПРИВОДНЯЮЩЕГОСЯ ОБЪЕКТА | 2011 |
|
RU2478983C1 |
| ГИДРОАКУСТИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ НЕПОДВИЖНОГО ОБЪЕКТА | 2015 |
|
RU2590932C1 |
| Способ классификации подводного объекта | 2023 |
|
RU2806876C1 |
| Способ определения глубины погружения объекта | 2017 |
|
RU2660292C1 |
| ГИДРОАКУСТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ ХАРАКТЕРИСТИК ОБЪЕКТА | 2014 |
|
RU2570100C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ ПОГРУЖЕНИЯ ОБЪЕКТА | 2016 |
|
RU2625041C1 |
| ГИДРОАКУСТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ ХАРАКТЕРИСТИК ОБЪЕКТА НА ДНЕ | 2014 |
|
RU2582623C1 |
| Способ измерения глубины погружения объекта | 2022 |
|
RU2789811C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЛУБИНЫ ОБЪЕКТА И ГИДРОЛОКАТОРОМ | 2013 |
|
RU2527136C1 |
| Способ определения вертикального угла положения подводного объекта | 2023 |
|
RU2810693C1 |
Изобретение относится к области гидроакустики и может быть использовано для измерения глубины погружения объекта. Способ предназначен для измерения глубины погружения объекта с использованием гидролокатора ближнего действия, установленного на движущемся носителе относительно горизонта его движения. Для этого в два момента времени с помощью гидролокатора определяют дистанцию до объекта и измеряют скорость движения носителя. Глубину погружения объекта относительно горизонта, на котором находится носитель, определяют, решая систему уравнений для дистанции до объекта в первый и второй моменты времени. Технический результат - повышение точности измерения глубины погружения объекта относительно горизонта движения носителя и упрощение реализации способа. 1 ил.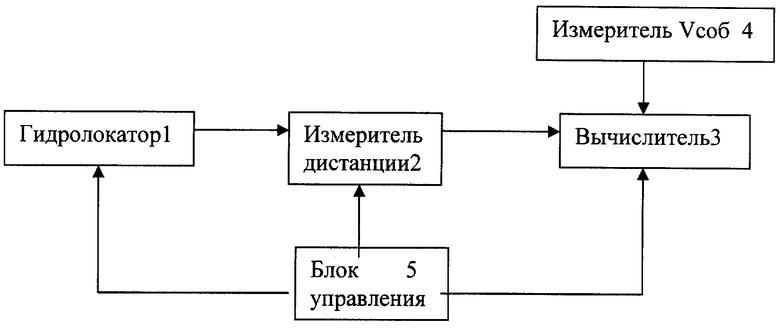
Способ определения глубины погружения объекта с использованием гидролокатора, установленного на подвижном носителе, относительно горизонта движения носителя, содержащий излучение зондирующего сигнала в момент времени t1, прием эхосигнала от объекта, измерение временной задержки между моментами излучения зондирующего сигнала и приема эхосигнала, определение на момент времени t1 дистанции D1 до объекта в направлении прихода отраженного сигнала по величине временной задержки и известной скорости распространения звука, отличающийся тем, что в момент времени t1+Δt, повторяют процедуру определения дистанции до объекта и находят дистанцию D2 до объекта в момент времени t1+Δt, измеряют скорость движения носителя V; и глубину Н погружения объекта относительно горизонта движения носителя определяют по формуле
 где
где

| СТАШКЕВИЧ А.П | |||
| Акустика океана | |||
| - Л.: Судостроение, 1966, с.263 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОЙ СКОРОСТИ СУДНА ПРИ КАЛИБРОВКЕ ЛАГОВ НА ГИДРОАКУСТИЧЕСКОЙ ТРАВЕРЗНОЙ МЕРНОЙ ЛИНИИ | 2003 |
|
RU2259572C2 |
| Способ определения глубин акватории фазовым гидролокатором бокового обзора и фазовый гидролокатор бокового обзора для его осуществления | 1991 |
|
SU1829019A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ, НАХОДЯЩИХСЯ В ТОЛЩЕ ДОННОГО ГРУНТА | 2004 |
|
RU2280266C2 |
| Устройство для комбинированного тушения пожаров и пожаровзрывопредотвращения пеной низкой и средней кратности | 2018 |
|
RU2708109C1 |

