Предлагаемое устройство относится к системам подготовки и тренировки летчиков к пилотированию и боевому применению ударной авиации и может быть использовано для обучения и поддержания профессионального мастерства летчиков ударных вертолетов стрельбе управляемым вооружением.
Эффективность применения управляемого вооружения на вертолетах во многом определяется степенью подготовки летчиков. В настоящее время обучение летчиков навыкам стрельбы управляемым вооружением проводится на комплексных тренажерах, предназначенных в основном для обучения техники пилотирования (взлет, посадка, маневрирование и т.д.). При этом в известных тренажерах вопросом подготовки летчиков к стрельбе управляемым вооружением уделяется второстепенное значение. Они не обеспечивают выполнение летчиком полного цикла операций управления вооружением, не отражают динамику систем управления вооружением и полета ракеты, содержат сложное и дорогостоящее оборудование летательного аппарата и других систем. Например, летный тренажер [1] содержит сложное оборудование: штатную кабину, спутниковую навигационную систему, инерциальную навигационную систему, систему цифрового синтеза изображений и т.д.
Обучение летчиков стрельбе управляемым вооружением непосредственно при полете вертолета, например, в режиме "Тренаж" без пуска ракет ограничивается временем тренировки, не отвечает широкому кругу задач, не позволяет инструктору вести обучение и контроль выполнения задачи, не соответствует реальным условиям стрельбы и требует больших финансовых затрат.
Наиболее близким техническим решением заявленному устройству служит "Устройство для имитации процессов пилотирования и боевого применения вертолета" [2] , содержащее рабочие места экипажа в кабине реального вертолета, штатные органы управления вертолетом и вооружением с датчиками положения и разовых команд, органы настройки приборного оборудования, систему контроля и управления процессом тренажа, моделирующий комплекс, имитаторы индикаторов и световых табло, блоки дополнительной согласующей оптики и широкоугольный просветный экранный комплекс, устанавливаемый перед кабиной реального вертолета.
Основными недостатками указанного прототипа являются:
- не обеспечивается выполнение летчиком полного объема и последовательности операций по управлению вооружением с автоматической системой слежения за целью, широко применяемой на современных ударных вертолетах;
- на имитаторах индикаторов не отображается динамика полета ракеты с характерным дымообразованием;
- неадекватность построения учебно-информационной модели для привития первоначальных навыков стрельбы управляемым вооружением из-за выполнения тренажера на основе сложного и дорогостоящего оборудования кабины реального вертолета и вспомогательного оборудования;
- для размещения тренажера требуется специально оборудованное помещение (габариты, наличие вентиляции и специальных источников питания), что затрудняет его применение в большинстве авиационных частей.
Задачей предлагаемого изобретения является создание простого в построении и надежного в эксплуатации тренажера для предварительного обучения и поддержания навыков стрельбы управляемым вооружением летчиков ударных вертолетов, который обеспечивает вместе с тем выполнение летчиком полной последовательности операций управления вооружением с автоматической системой слежения за целью, отображает на имитаторах индикаторов динамику полета ракеты с характерным дымообразованием и может быть установлен в любых помещениях, оборудованных стандартным сетевым питанием.
Решение данной задачи достигается тем, что в тренажер для подготовки летчиков ударных вертолетов к стрельбе управляемым вооружением, содержащий рабочее место летчика, штатные органы управления вертолетом и вооружением с датчиками положения и разовых команд, моделирующий комплекс, имитаторы индикаторов пилотирования и прибора наведения и систему контроля и управления процессом тренажа, при этом моделирующий комплекс содержит модель расчета параметров движения вертолета, первый вход которой соединен через устройство согласования с выходом органов управления вертолетом, второй вход соединен с выходом системы контроля и управления процессом тренажа, а выход - с первыми входами имитаторов индикаторов пилотирования и прибора наведения и системы контроля и управления процессом тренажа, а также модель фоно-целевой обстановки, вход которой соединен с выходом системы контроля и управления процессом тренажа, а выход соединен со вторыми входами имитаторов индикаторов пилотирования и прибора наведения, в моделирующий комплекс введены модель прибора наведения вооружения, модель автомата сопровождения цели, модель расчета траектории полета управляемой ракеты и модель имитации дымового шлейфа ракеты, первый вход модели прибора наведения соединен с выходом органов управления вооружением через устройство согласования, а второй вход соединен с выходом модели автомата сопровождения цели, вход которой соединен с выходом имитатора индикатора прибора наведения, первый выход модели прибора наведения соединен с третьим входом системы контроля и управления процессом тренажа и с третьими входами имитаторов индикаторов пилотирования и прибора наведения, второй выход соединен со входом модели расчета траектории полета ракеты, выход которой соединен со входом модели имитации дымового шлейфа, выход которой соединен со вторым входом системы контроля и управления и с четвертыми входами имитаторов индикаторов пилотирования и прибора наведения, при этом рабочее место летчика, органы управления вертолетом и вооружением, моделирующий комплекс, имитаторы индикаторов пилотирования и прибора наведения и система контроля и управления процессом тренажа установлены на едином корпусе с расположением имитаторов индикаторов пилотирования и прибора наведения относительно рабочего места летчика аналогично расположению реальных индикаторов на вертолете.
На чертеже представлена блок-схема предлагаемого тренажера, где:
1 - рабочее место летчика, 2 - органы управления вертолетом с датчиками, 3 - органы управления вооружением с датчиками, 4 - устройства согласования, 5 - моделирующий комплекс, 6 - модель расчета параметров движения вертолета, 7 - модель прибора наведения вооружения, 8 - модель автомата сопровождения цели, 9 - модель расчета траектории полета ракеты, 10 - модель имитации дымового шлейфа ракеты, 11 - модель фоно-целевой обстановки, 12 - система контроля и управления процессом тренажа, 13 - имитатор индикатора прибора наведения, 14 - имитатор индикатора пилотирования.
Предлагаемое устройство работает следующим образом. В представленном тренажере моделирующий комплекс 5, имитаторы индикаторов прибора наведения 13 и пилотирования 14 выполнены на основе вычислительной системы и мониторов двух взаимосвязанных персональных компьютеров (ПЭВМ) типа Pentium-III, объединенных локальной сетью для обмена информацией. Возможности современной компьютерной техники позволяют обеспечить моделирование в реальном масштабе времени движение вертолета, траектории полета и дымовой шлейф ракеты, процесса движения целей на окружающем фоне, работы прибора наведения и имитацию действия автомата сопровождения цели с высоким качеством графики на мониторах. Программное обеспечение компьютеров реализовано в операционной среде Windows-98, отображение информации на мониторах основано на применении библиотеки трехмерной графики Open GL.
Летчик или инструктор с помощью клавиатуры и манипулятора "мышь" компьютера задает режим движения вертолета на модели расчета параметров движения вертолета 6 и одну из множества типовых ситуаций фоно-целевой обстановки (ФЦО) на модели 11. На мониторах имитаторов индикаторов пилотирования 14 и прибора наведения 13 создается иллюзия движения вертолета с характерным звуком с модели 6, отображение прицельной информации с модели прибора наведения 7 и изображение ФЦО с модели 11. На мониторе пилотирования 14 также отображается пилотажно-навигационная информация о движении вертолета (скорость, высота, курс, тангаж, крен и др.), формируемая моделью параметров движения вертолета 6.
С помощью органов управления вертолетом 2 на мониторах имитаторов 13 и 14 создается иллюзия движения вертолета и летчик начинает выполнять операции поиска цели и предварительного наведения вертолета с помощью модели движения 6 в район цели, совмещая на мониторе имитатора индикатора пилотирования 14 прицельную марку, формируемую моделью прибора наведения вооружения 7, с предполагаемой целью. Затем с помощью органов управления вооружением 3 по монитору имитатора индикатора прибора наведения 13, на котором изображение цели формируется с увеличением реального прибора, летчик выполняет операции по распознаванию цели, обрамлению выбранной цели прицельной рамкой, формируемой моделью 7, и переводу ее на автосопровождение. Имитацию работы прибора наведения и автомата сопровождения цели выполняют модели прибора наведения 7 и автомата сопровождения цели 8, в которых реализованы алгоритмы работы реальных прибора наведения и автомата сопровождения. Автосопровождение цели прицельной рамкой в предполагаемом устройстве осуществляется путем подачи на имитатор приводов модели прибора наведения 7 сигналов обратной связи экранного образа цели, обрамленной прицельной рамкой, с монитора имитатора индикатора прибора наведения 14 через модель автомата сопровождения цели 8, которая запоминает образ цели и положение рамки и вырабатывает сигнал рассогласования в случае их взаимного смещения.
После захвата цели на автосопровождение, что сигнализируется появлением на мониторах символа "Захват", летчик с помощью органов управления вертолетом 2 производит по монитору имитатора индикатора пилотирования 14 операцию по совмещению прицельной рамки с имитируемой моделью 7 зоной встреливания в информационное поле управляемой по прямому лучу лазера ракеты или с зоной углов упреждения для ракет с полуактивной головкой самонаведения. Эта зона на мониторе имитатора индикатора пилотирования 14 изображается в виде кольца, в центр которого летчику необходимо завести прицельную марку. После появления на обоих мониторах символа "Пуск разрешен" и наличии символа "Захват" летчик может выполнить операцию пуска ракеты.
Полет ракеты с характерным дымообразованием на мониторах имитируется моделями расчета траектории полета ракеты 9 и имитации дымового шлейфа 10 по динамическим траекториям, зависящим от точности прицеливания и наведения вертолета в зону встреливания. По сигналам слежения (с модели 7) прицельной марки за целью и положения информационного поля управления ракетой модели имитации траектории полета ракеты 9 и имитации дымового шлейфа 10 формируют алгоритмы полета ракеты с дымом на основе динамических уравнений и статистических параметров траекторий и дыма полета реальных ракет.
Результаты пусков ракет по цели (попадание, промах) регистрируются в компьютерах и весь процесс наведения ракеты может быть воспроизведен, например, на принтере, что позволяет летчику или инструктору провести анализ стрельбы и оценить степень подготовки обучающихся стрельбе управляемым вооружением с вертолета.
Все операции, выполняемые летчиком при имитации стрельбы управляемым вооружением, в предлагаемом тренажере соответствуют операциям, проводимым летчиком в полете на реальном вертолете, например на вертолете Ка-50. Отображаемая информация на мониторах тренажера о ФЦО, работе автомата сопровождения цели и полете ракет с большой достоверностью и наглядностью соответствует реальным пускам ракет с вертолета. Простота построения тренажера достигается применением широко распространенных компьютеров, штатных органов управления (без использования оборудования вертолета), установленных на едином корпусе, что позволяет разместить его в любом помещении, оборудованном стандартным сетевым питанием.
Предлагаемый тренажер по сравнению с известным прототипом обладает следующими преимуществами:
- обеспечивает полноту и последовательность выполнения операций, близким к реальным, и качественное обучение и поддержание навыков стрельбы управляемым вооружением летчиков ударных вертолетов, оснащенных автоматической системой слежения за целью, и достоверно отображает на мониторах динамику полета ракеты;
- прост в построении, надежен в эксплуатации, мобилен и поэтому может быть установлен в любом помещении авиационной части, оборудованном стандартным электропитанием.
Высокая эффективность заявляемого устройства проверена при подготовке летчиков одноместного вертолета Ка-50.
Источники информации
1. Св. на полезную модель RU 20602 U1 от 19.10.2000 г., МПК7 G 09 B 9/08.
2. Св. на полезную модель RU 15147 U1 от 21.10.1999 г., МПК7 G 09 B 9/46, 9/08.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ЛЕТЧИКОВ ПИЛОТИРОВАНИЮ УДАРНОГО ВЕРТОЛЕТА И ПРИМЕНЕНИЮ АВИАЦИОННЫХ СРЕДСТВ ПОРАЖЕНИЯ | 2008 |
|
RU2367026C1 |
| ВИРТУАЛЬНЫЙ ТРЕНАЖЕР ВЕРТОЛЕТА | 1998 |
|
RU2149462C1 |
| УЧЕБНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС АВИАЦИОННЫЙ | 2004 |
|
RU2250511C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ДВУХМЕСТНЫЙ БОЕВОЙ ВЕРТОЛЕТ | 2002 |
|
RU2212632C1 |
| КОМПЛЕКСНАЯ ОБУЧАЮЩАЯ СИСТЕМА ДЛЯ АВИАЦИОННЫХ СПЕЦИАЛИСТОВ | 2002 |
|
RU2267163C2 |
| ТРЕНАЖЕР НАВОДЧИКОВ-ОПЕРАТОРОВ УСТАНОВОК ПУСКА РАКЕТ | 2006 |
|
RU2334935C2 |
| Тренажер для профессиональной подготовки военных специалистов носимых и выносных противотанковых ракетных комплексов (варианты) | 2015 |
|
RU2660796C1 |
| ВИРТУАЛЬНЫЙ ТРЕНАЖЕР САМОЛЕТА | 2001 |
|
RU2191432C1 |
| Комплексная система дистанционного обучения пилотированию летательных аппаратов | 2016 |
|
RU2647345C1 |
| Интегральная система дистанционного обучения пилотированию летательных аппаратов, комплексных испытаний и видеоконференцсвязи | 2018 |
|
RU2703325C1 |
Изобретение относится к системам подготовки и тренировки летчиков к пилотированию и боевому применению ударной авиации и может быть использовано для обучения стрельбе управляемым вооружением и поддержания профессионального мастерства летчиков ударных вертолетов. Сущность изобретения: в моделирующий комплекс тренажера для подготовки летчиков ударных вертолетов к стрельбе управляемым вооружением введены модель прибора наведения вооружения, модель автомата сопровождения цели, модель расчета траектории полета управляемой ракеты и модель имитации дымового шлейфа ракеты, первый вход модели прибора наведения соединен через устройство согласования с выходом органов управления вооружением, а второй вход соединен с выходом модели автомата сопровождения цели, вход которой соединен с выходом имитатора индикатора прибора наведения, первый вход модели прибора наведения соединен с третьим входом системы контроля и управления процессом тренажа и с третьими входами имитаторов индикаторов пилотирования и прибора наведения, второй выход соединен со входом модели расчета траектории полета ракеты, выход которой соединен со входом модели имитации дымового шлейфа, выход которой соединен со вторым входом системы контроля и управления и с четвертыми входами имитаторов индикаторов пилотирования и прибора наведения, при этом рабочее место летчика, органы управления вертолетом и вооружением, моделирующий комплекс, имитаторы индикаторов пилотирования и прибора наведения и система контроля и управления процессом тренажа установлены на едином корпусе с расположением имитаторов индикаторов пилотирования и прибора наведения относительно рабочего места летчика аналогично расположению реальных индикаторов на вертолете. Технический результат изобретения состоит в повышении качества и эффективности обучения летчиков ударных вертолетов. 1 ил.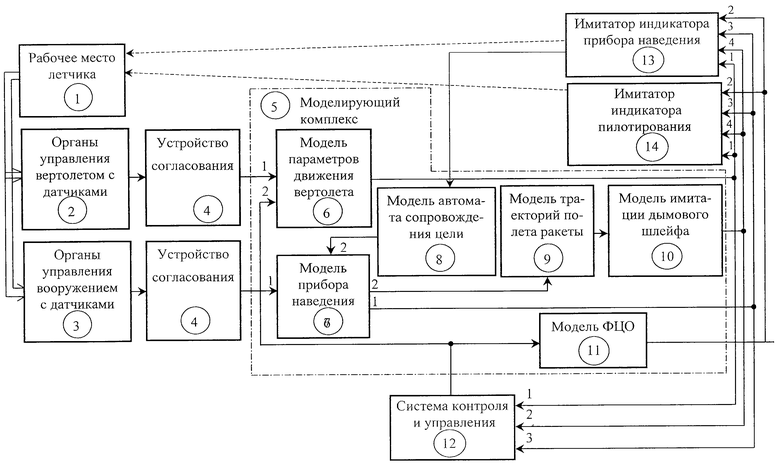
Тренажер для подготовки летчиков ударных вертолетов к стрельбе управляемым вооружением, содержащий рабочее место летчика, штатные органы управления вертолетом и вооружением с датчиками положения и разовых команд, моделирующий комплекс, имитаторы индикаторов пилотирования и прибора наведения и систему контроля и управления процессом тренажа, при этом моделирующий комплекс содержит модель расчета параметров движения вертолета, первый вход которой соединен через устройство согласования с выходом органов управления вертолетом, второй вход соединен с выходом системы контроля и управления процессом тренажа, а выход - с первыми входами имитаторов индикаторов пилотирования и прибора наведения и системы контроля и управления процессом тренажа, а также модель фоноцелевой обстановки, вход которой соединен с выходом системы контроля и управления процессом тренажа, а выход соединен со вторыми входами имитаторов индикаторов пилотирования и прибора наведения, отличающийся тем, что в моделирующий комплекс введены модель прибора наведения вооружения, модель автомата сопровождения цели, модель расчета траектории полета управляемой ракеты и модель имитации дымового шлейфа ракеты, первый вход модели прибора наведения соединен через устройство согласования с выходом органов управления вооружением, а второй вход соединен с выходом модели автомата сопровождения цели, вход которой соединен с выходом имитатора индикатора прибора наведения, первый выход модели прибора наведения соединен с третьим входом системы контроля и управления процессом тренажа и с третьими входами имитаторов индикаторов пилотирования и прибора наведения, второй выход соединен со входом модели расчета траектории полета ракеты, выход которой соединен со входом модели имитации дымового шлейфа, выход которой соединен со вторым входом системы контроля и управления и с четвертыми входами имитаторов индикаторов пилотирования и прибора наведения, при этом рабочее место летчика, органы управления вертолетом и вооружением, моделирующий комплекс, имитаторы индикаторов пилотирования и прибора наведения и система контроля и управления процессом тренажа установлены на едином корпусе с расположением имитаторов индикаторов пилотирования и прибора наведения относительно рабочего места летчика аналогично расположению реальных индикаторов на вертолете.
| Приспособление для автоматической очистки канализационных труб | 1929 |
|
SU15147A1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2163732C1 |
| GB 2003103 A, 07.03.1979 | |||
| US 3892051, 01.07.1975 | |||
| РАСПРЕДЕЛЕНИЕ ПАКЕТОВ СИНХРОНИЗАЦИИ ПО ТРАНСПОРТНЫМ ЛИНИЯМ СВЯЗИ Wi-Fi | 2012 |
|
RU2603695C1 |
| DE 3916545 A1, 22.11.1990. | |||
