Изобретение относится к грузоподъемному оборудованию, а именно к дозированию и определению массы груза при выполнении погрузочно-разгрузочных работ.
Известны подвесные крановые весы, которые могут быть использованы для взвешивания грузов, перемещаемых подъемно-транспортными механизмами, в металлургии, машиностроении и других отраслях промышленности. Весы содержат корпус с крышкой, связанный посредством троса с приводом подъема крана, размещенные в корпусе силоизмерительный датчик, узел силовведения, блок питания и аппаратуру визуальной индикации результатов взвешивания. Узел силовведения выполнен в виде двух упругих элементов различной жесткости, соединенных последовательно через пластину, в центре которой шарнирно закреплен грузоподъемный крюк, причем упругий элемент большей жесткости размещен между основанием корпуса и пластиной, а упругий элемент меньшей жесткости - между пластиной и основанием силоизмерительного датчика, силовой вход которого связан с крышкой корпуса через нажимной винт (заявка 94027725, МПК В 66 С 13/16, опубл. 20.09.1996 г.).
Наиболее близким аналогом является грузоподъемное устройство, содержащее грузоподъемный электромагнит, состоящий из магнитопровода и обмотки, грузовую подвеску для крепления электромагнита, блок управления электромагнитом, кабель питания, соединяющий блок управления с электромагнитом. Устройство обеспечивает дозирование металлических шихтовых материалов в процессе их перегрузки путем регулирования тока грузоподъемного электромагнита (Автоматизация и механизация процессов литья. Киев: Наукова думка, 1973, с. 3-16. // Труды ИПЛ АН УССР, вып.5).
Величина тока электромагнита позволяет лишь приближенно характеризовать массу поднятого груза. Поэтому важным недостатком известного устройства является низкая точность определения массы груза, в особенности при перегрузке материалов, неоднородных по своим магнитным свойствам, а также по размерам и форме кусков. Неточность дозирования шихты в литейном производстве ухудшает качество выплавляемого металла и получаемых из него отливок. При погрузке материалов, например металлолома в вагон, возможна как существенная недогрузка, что повышает стоимость транспортировки, так и превышение допустимой загрузки, что требует возвращения вагона для его частичной разгрузки и последующего повторного взвешивания.
Технической задачей изобретения является повышение точности определения массы поднятого электромагнитом груза и точности его дозирования, а также обеспечение возможности автоматического суммирования массы загруженных материалов.
Это достигается тем, что грузоподъемное устройство, содержащее грузоподъемный электромагнит, состоящий из магнитопровода и обмотки, грузовую подвеску для крепления грузоподъемного электромагнита, блок управления грузоподъемным электромагнитом, кабель питания, соединяющий блок управления с грузоподъемным электромагнитом, оснащено датчиком силы, встроенным в грузовую подвеску, двумя сетевыми приемопередатчиками, подключенными к кабелю питания, блоком обработки данных и индикации, блоком питания первого сетевого приемопередатчика, размещенным в грузовой подвеске, при этом первый сетевой приемопередатчик установлен в грузовой подвеске и информационным входом подключен к датчику силы, а выход второго сетевого приемопередатчика соединен со входом блока обработки данных и индикации.
Блок питания первого сетевого приемопередатчика может быть выполнен автономным или быть подключен к токопроводящим жилам кабеля питания. Для осуществления автоматического взвешивания груза второй сетевой приемопередатчик своим управляющим входом может быть соединен с блоком управления. Для выполнения дозирования поднятого груза выход блока обработки данных и индикации может быть подключен к входу блока управления с возможностью регулирования тока, поступающего в электромагнит, в зависимости от массы поднятого груза. Целесообразно выполнение устройства таким образом, что кабель питания пропущен через грузовую подвеску с возможностью подключения к нему первого сетевого приемопередатчика без разрыва токопроводящих жил кабеля.
Устройство может быть оснащено блоком защиты от перенапряжения, установленным в грузовой подвеске и подключенным к кабелю питания параллельно обмотке грузоподъемного электромагнита. Для обнаружения повреждения кабеля питания устройство может быть оснащено блоком контроля, выполненным с возможностью формирования команды включения защиты при отсутствии приема сигналов связи, установленным в грузоподъемном электромагните и подключенным входом к первому сетевому приемопередатчику, а выходом - к блоку защиты от перенапряжения.
Вариант осуществления изобретения характеризуется тем, что грузоподъемное устройство, содержащее грузоподъемный электромагнит, состоящий из магнитопровода и обмотки, грузовую подвеску для крепления грузоподъемного электромагнита, блок управления грузоподъемным электромагнитом, кабель питания, соединяющий блок управления с грузоподъемным электромагнитом, оснащено датчиком силы, встроенным в грузоподъемный электромагнит в месте его крепления к грузовой подвеске, двумя сетевыми приемопередатчиками, подключенными к кабелю питания, блоком обработки данных и индикации, блоком питания первого сетевого приемопередатчика, размещенным в грузоподъемном электромагните, при этом первый сетевой приемопередатчик установлен в грузоподъемном электромагните и информационным входом подключен к датчику силы, а выход второго сетевого приемопередатчика соединен со входом блока обработки данных и индикации.
При этом грузоподъемное устройство может быть снабжено по меньшей мере двумя датчиками силы, каждый из которых установлен в грузоподъемном электромагните в месте его крепления к грузовой подвеске, и преобразователем, выполненным с возможностью векторного суммирования сигналов датчиков силы, включенным между датчиками силы и информационным входом первого сетевого приемопередатчика. Блок питания первого сетевого приемопередатчика может быть выполнен автономным или подключенным к токопроводящим жилам кабеля питания.
Для осуществления автоматического взвешивания груза второй сетевой приемопередатчик своим управляющим входом соединен с блоком управления. Для выполнения дозирования поднятого груза выход блока обработки данных и индикации подключен к входу блока управления с возможностью регулирования тока, поступающего в электромагнит, в зависимости от массы поднятого груза. Грузоподъемное устройство может быть оснащено блоком защиты от перенапряжения, установленным в грузоподъемном электромагните и подключенным параллельно его обмотке. Для обнаружения повреждения кабеля питания устройство может быть оснащено блоком контроля, выполненным с возможностью формирования команды включения защиты при отсутствии приема сигналов связи, установленным в грузоподъемном электромагните и подключенным входом к первому сетевому приемопередатчику, а выходом - к блоку защиты от перенапряжения.
Вариант устройства предназначен для использования только со специально изготовленными для этого грузовыми электромагнитами, но более надежен, поскольку не требует подключения кабеля питания к грузовой подвеске.
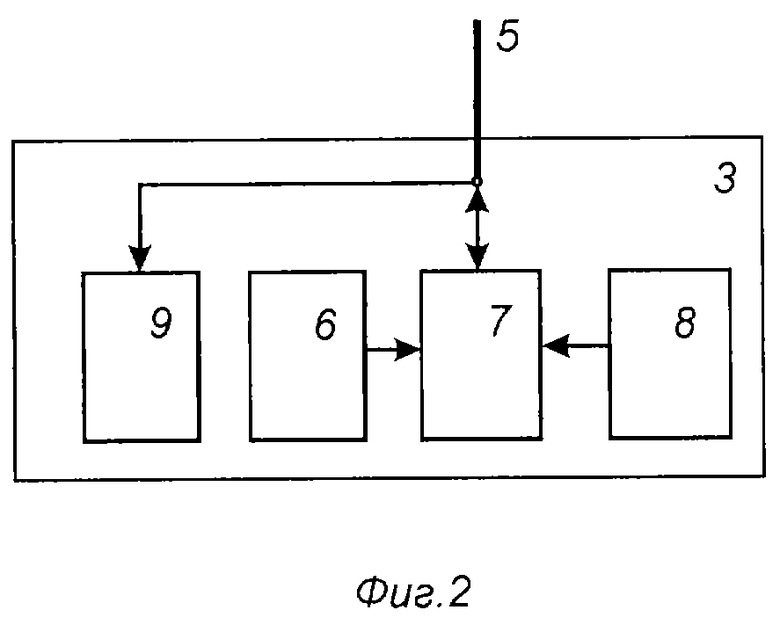
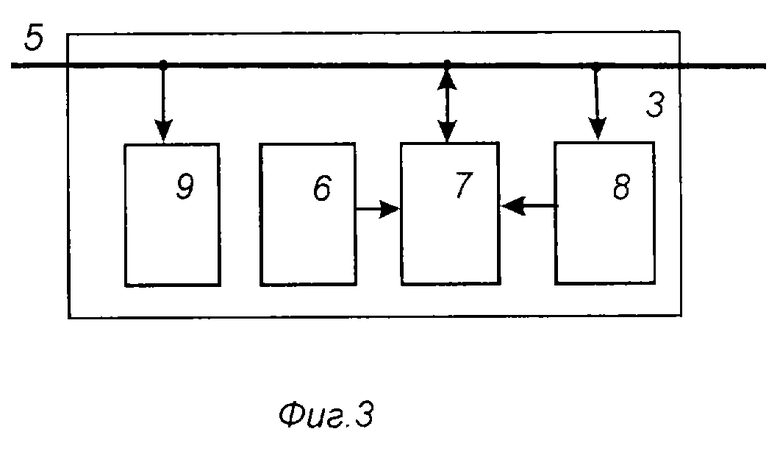
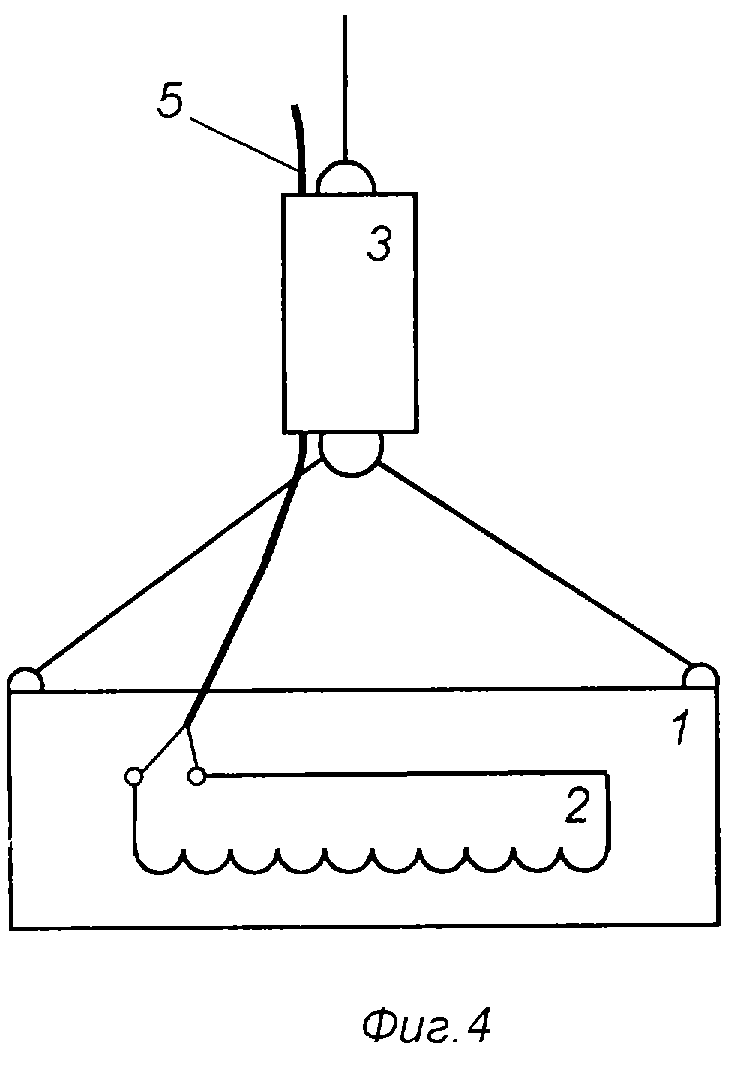
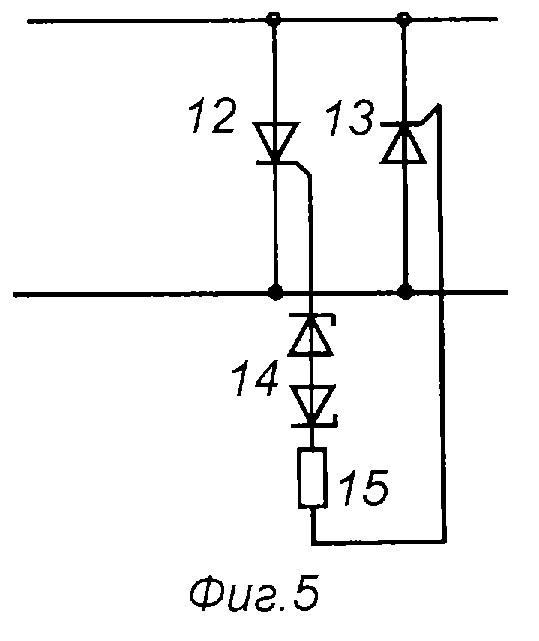
Сущность изобретения поясняется чертежами, где на фиг.1 показана схема грузоподъемного устройства; на фиг. 2 и 3 - функциональная схема грузовой подвески; на фиг. 4 - подключение грузоподъемного электромагнита кабелем, пропущенным через подвеску; на фиг.5 - схема устройства защиты; на фиг.6 - подключение блока обработки данных и индикации к блоку управления; на фиг.7 - подключение блока контроля; на фиг.8 - вариант схемы грузоподъемного устройства и на фиг.9 - функциональная схема комплекса устройств, размещенных в электромагните.
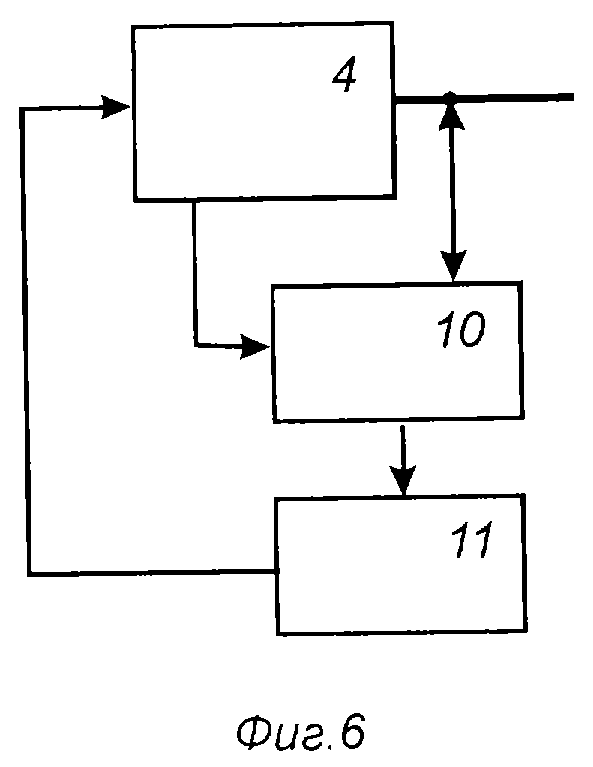
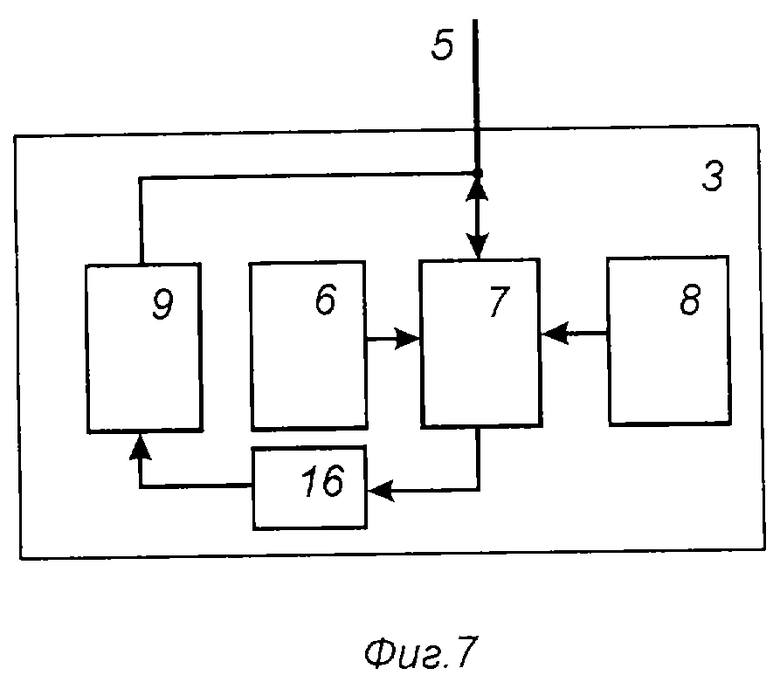
Грузоподъемное устройство содержит грузоподъемный электромагнит 1, состоящий из магнитопровода (на схеме не показан) и обмотки 2, грузовую подвеску 3 для крепления грузоподъемного электромагнита, блок управления 4, кабель питания 5, соединяющий блок управления с грузоподъемным электромагнитом, встроенные в грузовую подвеску датчик силы 6, первый сетевой приемопередатчик 7, блок питания 8, который может быть выполнен автономным (фиг.2) или быть подключенным к кабелю питания 5 и получать энергию от передаваемой к грузоподъемному электромагниту (фиг.3), блок защиты 9, а также второй сетевой приемопередатчик 10 и блок обработки данных и индикации 11, которые размещены вместе с блоком управления 4 в кабине крана и объединены с ним конструктивно.
Для осуществления автоматического взвешивания груза после его подъема управляющий вход второго сетевого приемопередатчика 10 соединен с блоком управления, который для этого выполнен с возможностью формирования сигнала включения режима взвешивания груза. В качестве сетевых приемопередатчиков 7 и 10 могут быть использованы, например, модульные сетевые приемопередатчики, предназначенные для передачи информации по сети переменного тока с использованием частотной модуляции несущей частоты. Кабель питания 5 подключен сначала к грузоподъемному электромагниту 1, а затем - к грузовой подвеске 3 (фиг.1 и 2). Возможно подключение питающего кабеля к грузоподъемному электромагниту через грузовую подвеску (фиг. 3 и 4). При этом блок питания 8 подключается к кабелю питания без разрыва его токопроводящих жил.
Блок защиты 9 от перенапряжения подключен параллельно обмотке грузового электромагнита и состоит из двух тиристоров 12 и 13, включенных встречно и параллельно друг другу, и цепи управления, образованной набором последовательно соединенных стабилитронов 14, суммарное напряжение отпирания которых выше максимального рабочего напряжения на обмотке электромагнита, и резистором 15, служащим для ограничения тока в цепи управления (фиг.3).
Для управления работой блока защиты используется блок контроля 16, подключенный к первому приемопередатчику 7 и формирующий команду срабатывания защиты при прекращении его связи со вторым приемопередатчиком 10, что расценивается как обрыв кабеля (фиг.7). Блок обработки данных и индикации 11 служит для определения массы поднятой порции груза, может производить вычисление общей массы загруженного в вагон материала путем суммирования взвешенных в процессе погрузки порций и оснащен цифровым табло для отображения результатов. Блок обработки данных и индикации 11 может формировать сигнал, зависящий от измеренной массы и используемый для регулирования тока, поступающего в электромагнит от блока управления, что позволяет уменьшать массу поднимаемого груза в случае превышения допустимой нагрузки для грузоподъемного устройства, а также автоматически дозировать груз. Для осуществления такого режима работы выход блока обработки данных и индикации подключен к входу блока управления (фиг.6).
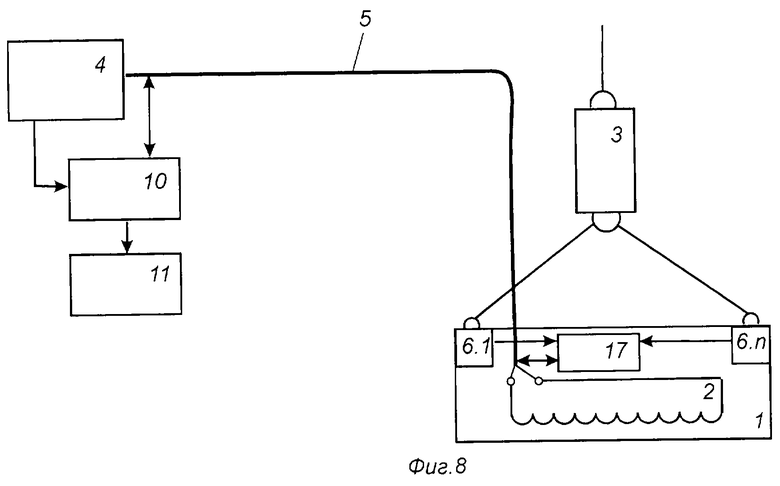
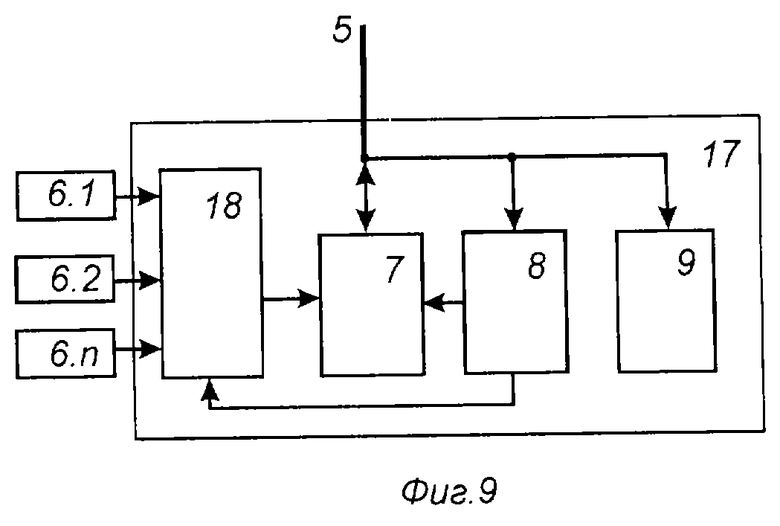
В варианте исполнения устройства (фиг.8) комплекс электронных устройств 17, включающий первый сетевой приемопередатчик 7, блок питания 8, блок защиты 9 и преобразователь 18, размещен непосредственно в грузоподъемном электромагните 1. В этом варианте используется несколько датчиков силы 6.1-6.n, которые тоже установлены в грузоподъемном электромагните 1 в местах крепления его к грузовой подвеске и обеспечивают измерение составляющих массы груза, приходящихся на данную точку крепления. Поскольку усилие, воспринимаемое каждым датчиком силы, зависит не только от веса груза, но и от угла, под которым подходит к данному датчику трос (цепь) грузовой подвески, то вес груза определяют путем векторного суммирования данных, полученных от всех датчиков, подключенным к ним преобразователем 18, который передает результат вычисления в первый приемопередатчик 7. В этом варианте исполнения устройства блок питания первого сетевого приемопередатчика тоже может быть выполнен либо автономным, либо быть подключен к токопроводящим жилам кабеля и получать энергию от передаваемой к грузоподъемному электромагниту. Подключение управляющего входа второго сетевого приемопередатчика к блоку управления позволяет производить взвешивание груза автоматически после его поднятия.
Блок обработки данных и индикации 11, блок контроля 16 и блок защиты 9 от перенапряжения подключены и функционируют так же, как в ранее описанном варианте исполнения устройства. Данный вариант более надежен в эксплуатации, поскольку не имеет уязвимого для повреждений участка кабеля, соединяющего электромагнит с подвеской, но может быть использован только со специально изготовленными для этого электромагнитами, оснащенными указанными выше электронными устройствами. В случае крепления электромагнита к подвеске в одной точке нет необходимости в векторном суммировании данных и в грузоподъемном электромагните может быть установлен один датчик 6, подключенный к информационному входу первого приемопередатчика непосредственно, аналогично тому, как это показано на схемах грузовой подвески (фиг.2, 3 и 7).
Работа грузоподъемного устройства осуществляется следующим образом. При поступлении тока от блока управления 4 в грузоподъемный электромагнит 1 производится захват некоторого количества груза. При подъеме груза датчик силы 6 преобразует приложенное к нему усилие в электрический сигнал, поступающий на первый сетевой приемопередатчик 7. Измерение массы груза производится по команде оператора либо автоматически по команде, формируемой блоком управления 4 и переключающей второй сетевой приемопередатчик 10 на некоторое время в режим передачи. Факт передачи воспринимается первым сетевым приемопередатчиком 7 как команда на передачу данных, поступающих в этот момент от датчика, по кабелю питания 5 на второй сетевой приемопередатчик 10 и в блок обработки данных и индикации 11.
В варианте грузоподъемного устройства, предусматривающем использование нескольких датчиков силы, осуществляется кроме того векторное преобразование сигналов всех датчиков 6.1-6.n. в суммарный сигнал, пропорциональный массе груза. При работе в режиме дозирования захват груза целесообразно выполнять при максимальном токе, после подъема груза уменьшать ток для сброса лишнего груза при непрерывном измерении его массы до тех пор, пока не будет получена заданная порция, а затем, отключив ток, сбросить ее в вагон или в приемный бункер. Результат измерения массы порции груза перед его сбросом запоминается блоком обработки данных и индикации 11 и суммируется в нем с результатами измерения массы предыдущих порций, в результате чего вычисляется общая масса материала, например, погруженного в вагон.
В случае обрыва питающего кабеля электрическая энергия, накопленная грузоподъемным электромагнитом, вызывает возникновение э.д.с. самоиндукции, которая на разомкнутой обмотке 2 во много раз превышает напряжение питания, что может привести к пробою изоляции обмотки и сгоранию электронных устройств, подключенных к ней. Срабатывание блока защиты непосредственно от перенапряжения (фиг. 5) или по сигналу блока контроля 16 приводит к отпиранию тиристоров 12 и 13, шунтирующих обмотку электромагнита, что уменьшает величину э.д.с. и предотвращает повреждение обмотки и электронных устройств.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обмена информацией между модулями системы безопасности грузоподъемной машины и устройство для его осуществления | 2022 |
|
RU2778173C1 |
| ОГРАНИЧИТЕЛЬ НАГРУЗКИ ГРУЗОПОДЪЕМНОГО КРАНА | 2011 |
|
RU2483016C2 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ ЭЛЕКТРОМАГНИТОМ | 2001 |
|
RU2228556C2 |
| ОГРАНИЧИТЕЛЬ НАГРУЗКИ ГРУЗОПОДЪЕМНОГО КРАНА | 2010 |
|
RU2445252C1 |
| СПОСОБ ОЦЕНКИ МАССЫ ГРУЗА, ПОДНИМАЕМОГО И/ИЛИ ПЕРЕМЕЩАЕМОГО ПОДЪЕМНО-ТРАНСПОРТНЫМ УСТРОЙСТВОМ | 2016 |
|
RU2626791C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ ЭЛЕКТРОМАГНИТОМ | 2003 |
|
RU2256253C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ УСТРОЙСТВА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2004 |
|
RU2277065C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ ЭЛЕКТРОМАГНИТОМ | 2002 |
|
RU2235379C2 |
| СПОСОБ РЕГИСТРАЦИИ И РЕГИСТРАТОР ПАРАМЕТРОВ РАБОТЫ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2005 |
|
RU2307060C2 |
| Грузовая подвеска крана | 1987 |
|
SU1518265A1 |
Изобретение относится к грузоподъемному оборудованию, а именно к дозированию и определению массы груза при выполнении погрузочно-разгрузочных работ. Грузоподъемное устройство по первому варианту содержит грузоподъемный электромагнит, грузовую подвеску для крепления грузоподъемного электромагнита, блок управления грузоподъемным электромагнитом и кабель питания, соединяющий блок управления с грузоподъемным электромагнитом, состоящим из магнитопровода и обмотки. Грузоподъемное устройство также оснащено датчиком силы, встроенным в грузовую подвеску, двумя сетевыми приемопередатчиками, подключенными к кабелю питания, блоком обработки данных и индикации и блоком питания первого сетевого приемопередатчика, размещенным в грузовой подвеске. При этом первый сетевой приемопередатчик установлен в грузовой подвеске и информационным входом подключен к датчику силы, а выход второго сетевого приемопередатчика соединен со входом блока обработки данных и индикации. По второму варианту грузоподъемное устройство отличается размещением датчика силы, первого сетевого приемопередатчика и блока питания первого сетевого приемопередатчика в грузоподъемном электромагните. Технический результат изобретения - повышение точности определения массы поднятого электромагнитом груза и точности его дозирования, а также обеспечение возможности автоматического суммирования массы загруженных материалов. 2 c. и 14 з.п. ф-лы, 9 ил.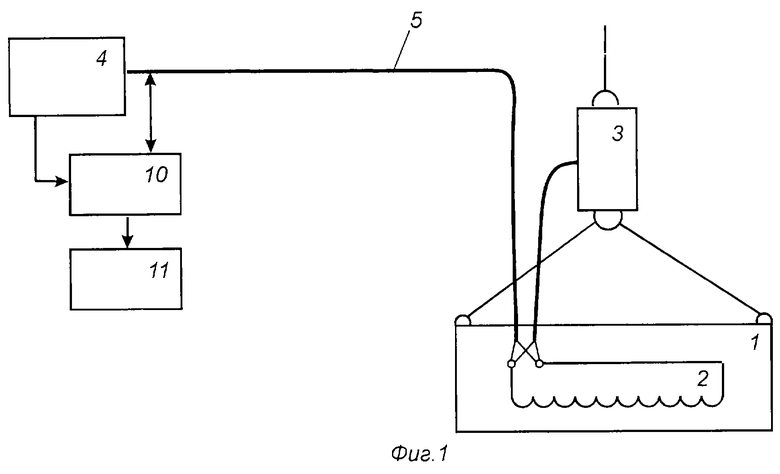
| Автоматизация и механизация процессов литья | |||
| Труды ИПЛ АН УССР, вып.5 | |||
| - Киев: Наукова думка, 1973, с.3-16 | |||
| RU 94027725 Al, 20.09.1996 | |||
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ГРУЗА | 1997 |
|
RU2119648C1 |
| СПОСОБ ФИЛЬТРАЦИИ И САМООЧИЩАЮЩИЙСЯ ФИЛЬТР ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2390366C2 |

