Изобретение относится к области подъемно-транспортной техники и может быть использовано в системах управления и защиты от перегрузок грузоподъемных кранов мостового, стрелового или иного типа.
Известен ограничитель нагрузки грузоподъемного крана, содержащий управляющее устройство на основе микроконтроллера и тензорезисторный датчик усилия, установленный в шарнирном узле крюковой подвески и подключенный к управляющему устройству с помощью общего проводного или беспроводного последовательного интерфейсного канала. Датчик усилия состоит из двух силоизмерительных блоков с силовоспринимающими элементами, образующими опору концов оси блоков крюковой подвески [1].
При вращении блоков на оси крюковой подвески возникают дополнительные неконтролируемые нагрузки на силовоспринимающие элементы датчика усилия вследствие наличия сил трения в подшипниках. Это приводит к погрешности ограничения нагрузки. Расположение двух силоизмерительных блоков на наружных поверхностях щек увеличивает габаритные размеры крюковой подвески и затрудняет реализацию их защиты от повреждений.
Известен также ограничитель нагрузки грузоподъемных машин, содержащий датчик силы в виде упругого элемента, установленного на поверхности какого-либо конструктивного элемента грузоподъемной машины в зоне действия измеряемых нагрузок. На внутренней поверхности упругого элемента, выполненного в форме полого цилиндра, закреплены тензорезисторы, сигнал с которых поступает на электронное пороговое устройство [2].
Размещение тензопреобразователей на внутренней поверхности полого цилиндра усложняет и удорожает изготовление и ремонт датчика силы, так как требует применения специального приспособления для прижатия тензопреобразователей к внутренней поверхности цилиндра в процессе их наклейки. Использование полой оси снижает ее прочность и, соответственно, безопасность работы грузоподъемной машины.
Наиболее близким к заявленному изобретению является ограничитель нагрузки грузоподъемного крана, содержащий управляющее устройство на основе микроконтроллера и тензорезисторный датчик нагрузки с упругим силовоспринимающим элементом в виде пустотелой оси блоков крюковой подвески. Ось включает в себя концевые опорные части и расположенную между ними силовоспринимающую часть с закрепленными на ней тензопреобразователями. Датчик снабжен расположенным в полости оси блоком обработки сигналов с тензопреобразователей, выполненным на основе микроконтроллера, снабженного аналого-цифровым преобразователем [3].
В этом техническом решении также используется пустотелая ось блоков крюковой подвески. Это приводит к снижению прочности оси и к возможным авариям грузоподъемного крана при его перегрузках, поскольку излом оси приводит к падению грузозахватного органа (крюка) с грузом. Причем устранение этого недостатка путем применения оси с высоким запасом прочности невозможно, поскольку при повышении ее жесткости происходит уменьшение деформации силовоспринимающей части оси и, соответственно, выходного сигнала тензопреобразователей.
Недостатком известного технического решения является также пониженная точность ограничения нагрузки, поскольку на результат ее измерения влияет неравенство и непостоянство сил натяжения отдельных ветвей грузового каната и сил воздействия отдельных блоков крюковой подвески на силовоспринимающую часть оси. Это обусловлено, в частности, наличием сил трения в подшипниках блоков.
В оси блоков крюковой подвески у грузоподъемных кранов, находящихся в настоящее время в эксплуатации, нет отверстий. Для того чтобы сделать ось пустотелой, ее необходимо демонтировать с грузоподъемного крана и выполнить сверление в производственных условиях. Кроме того, оси блоков изготавливаются из обычной стали, не обладающей стабильными свойствами упругости. Это затрудняет реализацию известного ограничителя нагрузки на грузоподъемных кранах, находящихся в эксплуатации.
Замена или ремонт датчика усилия приводит к необходимости разборки крюковой подвески, что затрудняет техническое обслуживание ограничителя нагрузки и приводит к увеличению простоев грузоподъемного крана.
Задачами, на решение которых направлено заявленное изобретение, являются:
- повышение безопасности работы грузоподъемного крана путем предотвращения его аварий в случае разрушения силовоспринимающей части датчика нагрузки и повышения помехозащищенности и надежности передачи данных;
- повышение точности работы ограничителя нагрузки;
- обеспечение возможности дооборудования грузоподъемного крана ограничителем нагрузки без доработки его силовых элементов;
- снижение времени простоя грузоподъемного крана при техническом обслуживании и ремонте ограничителя нагрузки (его датчика усилия);
- упрощение технического обслуживания и ремонта ограничителя нагрузки.
В ограничителе нагрузки грузоподъемного крана, содержащем датчик нагрузки, установленный на крюковой подвеске, и управляющее устройство, соединенное с датчиком нагрузки с помощью беспроводного, или проводного, или комбинированного канала передачи данных, и выполненное на основе микроконтроллера с возможностью формирования предупреждающих сигналов для машиниста и/или сигналов управления приводом подъема крюка, направленных на предотвращение превышения измеренной нагрузки крана ее предельно допустимой величины, поставленные технические задачи решаются тем, что по меньшей мере один силовоспринимающий и/или чувствительный элемент датчика нагрузки размещается на траверсе крюковой подвески под упорным подшипником крюка, или под гайкой крюка, или на поверхности траверсы, или на внутренней или внешней поверхности щеки в зоне действия нагрузок от траверсы, или под опорой траверсы.
Достижению технических результатов способствуют также частные признаки изобретения:
- реализация силовоспринимающего элемента датчика нагрузки в виде упругого элемента или преобразователя силы в давление, а чувствительного элемента, соответственно, в виде тензорезисторного, емкостного, оптического, индуктивного или магнитоупругого преобразователя деформации упругого элемента или преобразователя давления в электрический сигнал;
- выполнение силовоспринимающего элемента датчика нагрузки кольцевым с возможностью пропуска через него хвостовика крюка;
- размещение по меньшей мере одного чувствительного и/или силовоспринимающего элемента датчика нагрузки на внутренней или внешней поверхности щеки крюковой подвески с возможностью измерения усилий в щеке, или его реализация в виде опоры траверсы;
- включение в состав канала передачи данных между датчиком нагрузки и управляющим устройством двух приемопередающих модулей (автономных или входящих в их состав, в том числе в состав их микроконтроллеров);
- реализация приемопередающих модулей беспроводного канала передачи данных радиочастотными с антеннами и микроконтроллерами, обеспечивающими хранение в энергонезависимой памяти их индивидуальных адресов и/или адресов приемопередатчиков, которым предназначена передаваемая информация, а также с возможностью приема и формирования пакетов данных по беспроводному каналу;
- включение в состав датчика нагрузки блока обработки выходных сигналов чувствительных элементов, выполненного на основе микроконтроллера со встроенным или внешним аналого-цифровым преобразователем, с возможностью суммирования их выходных сигналов или определения нагрузки в двух или более плоскостях в случае необходимости;
- оснащение датчика нагрузки автономным источником питания (гальванической батареи или аккумулятором, снабженным устройством его подзарядки от внешнего источника питания, и/или от напряжения, подаваемого на механизмы грузоподъемного крана, и/или от солнечного элемента), устройством для контроля его разряда, подключенным к микроконтроллеру или встроенным в него, с возможностью передачи соответствующего сигнала в управляющее устройство;
- оснащение датчика нагрузки датчиком движения крюковой подвески, выполненным на основе акселерометра и/или гироскопа, с возможностью изменения периода и/или момента измерения нагрузки и/или передачи данных о величине нагрузки крана в зависимости от выходного сигнала датчика движения, в том числе по сигналам прерывания, выводящим микроконтроллер из «спящего» режима;
- применение дополнительного активного или пассивного ретранслятора в беспроводном канале передачи данных;
- оснащение ограничителя устройством позиционирования и передачи информации о положении крюковой подвески в управляющее устройство с последующим формированием предупреждающих сигналов для машиниста и/или сигналов управления приводами грузоподъемного крана из условия ограничения зоны допустимых положений крюковой подвески, и/или с изменением предельно допустимой величины нагрузки крана в зависимости от этого положения.
Сущность предложенного технического решения заключается в том, что в предлагаемом ограничителе нагрузки грузоподъемного крана построение датчика нагрузки базируется на прямом измерении усилия в хвостовике крюка либо в траверсе, на которой он закреплен.
Такое исполнение датчика нагрузки исключает необходимость применения пустотелой оси, что позволяет исключить ее ослабление и тем самым обеспечивает повышение безопасности работы грузоподъемного крана. Позволяет исключить падение груза в случае разрушения силовоспринимающей части датчика.
Реализация кольцевого датчика нагрузки (усилия), подкладываемого под упорный подшипник или под гайку крюка, обеспечивает простоту монтажа, замены и ремонта ограничителя. Позволяет получить максимально возможную точность работы ограничителя нагрузки, поскольку в этом случае датчик нагрузки обеспечивает прямое измерение веса груза с крюком.
Такое техническое решение позволяет осуществить дооборудование грузоподъемного крана ограничителем нагрузки без доработки его силовых элементов, обеспечивает снижение времени простоя грузоподъемного крана при техническом обслуживании и ремонте ограничителя (датчика) нагрузки.
Выполнение линии связи между датчиком нагрузки и управляющим устройством комбинированной, с проводной и беспроводной передачей данных, повышает надежность передачи данных за счет исключения возможности механического повреждения линии связи во время монтажа на грузоподъемном кране и при его эксплуатации. При этом сохраняется высокая помехозащищенность датчика нагрузки и управляющего устройства от электромагнитных наводок за счет гальванической развязки между указанными элементами, установленными на разнесенных узлах конструкции грузоподъемного крана. Это повышает безопасность работы грузоподъемного крана за счет более точного и своевременного срабатывания ограничителя нагрузки.
Упругий силовоспринимающий элемент датчика нагрузки имеет простую геометрическую форму и конструкцию, что упрощает его изготовление, эксплуатацию и ремонт (замену). Его повышенная защита от повреждений, ввиду расположения внутри крюковой подвески, а также отсутствие необходимости разборки крюковой подвески при замене этого датчика, приводит как к повышению надежности работы ограничителя (безопасности работы крана), так и к упрощению технического обслуживания и ремонта ограничителя.
Формирование с помощью микроконтроллера приемопередающего модуля пакетов для передачи данных позволяет сократить время работы приемопередатчика в режиме, как передачи, так и приема, и тем самым уменьшить энергопотребление от автономного источника питания и увеличить срок его службы без замены, что упрощает техническое обслуживание ограничителя.
К этому же результату приводит оснащение ограничителя датчиком движения крюковой подвески, выполненным на основе акселерометра и/или гироскопа, позволяющим реализовать энергосберегающие режимы работы датчика нагрузки.
Использование ретранслятора в беспроводной линии связи между датчиком нагрузки и управляющим устройством позволяет увеличить надежность передачи данных без увеличения мощности приемопередатчика.
Оснащение датчика нагрузки устройством позиционирования и передача информации о положении крюковой подвески в управляющее устройство позволяет повысить безопасность работы крана путем реализации координатной защиты по положению крюковой подвески крана.
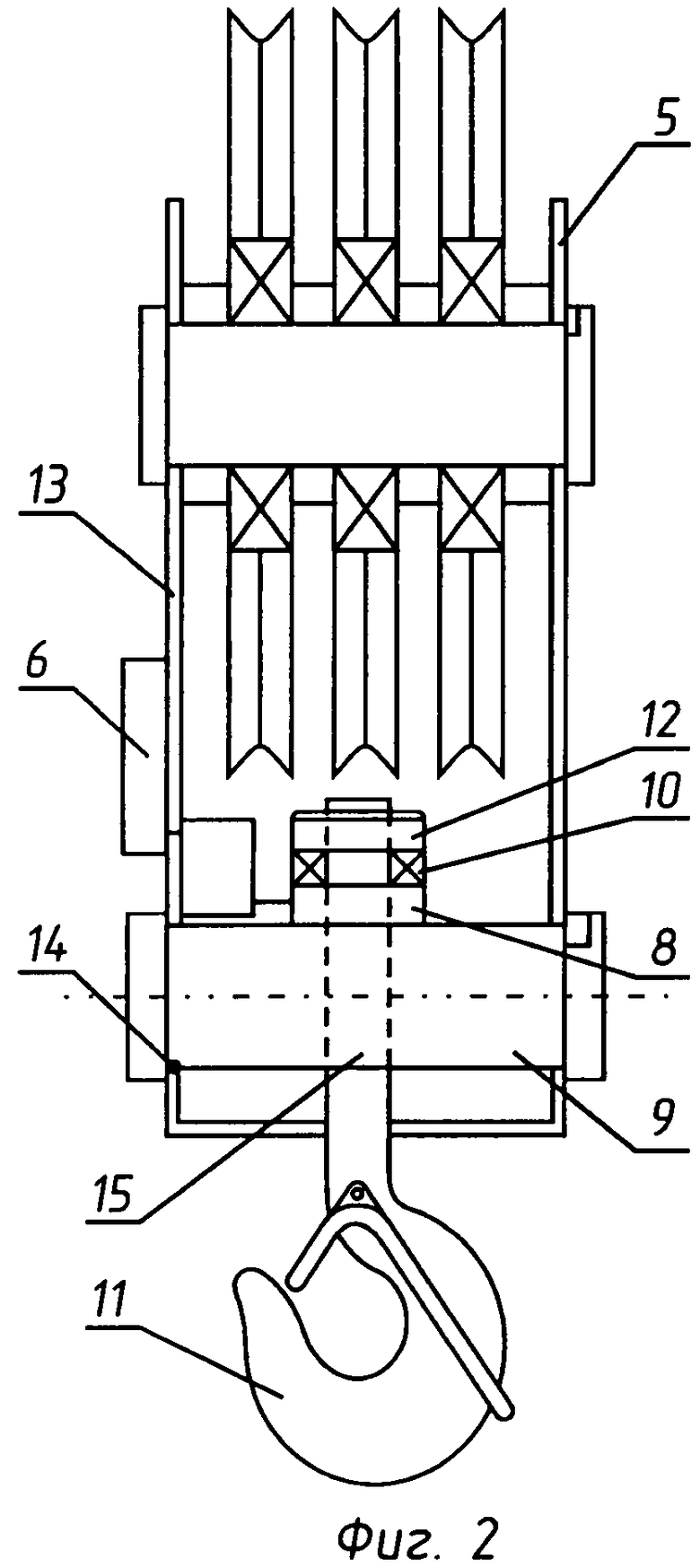
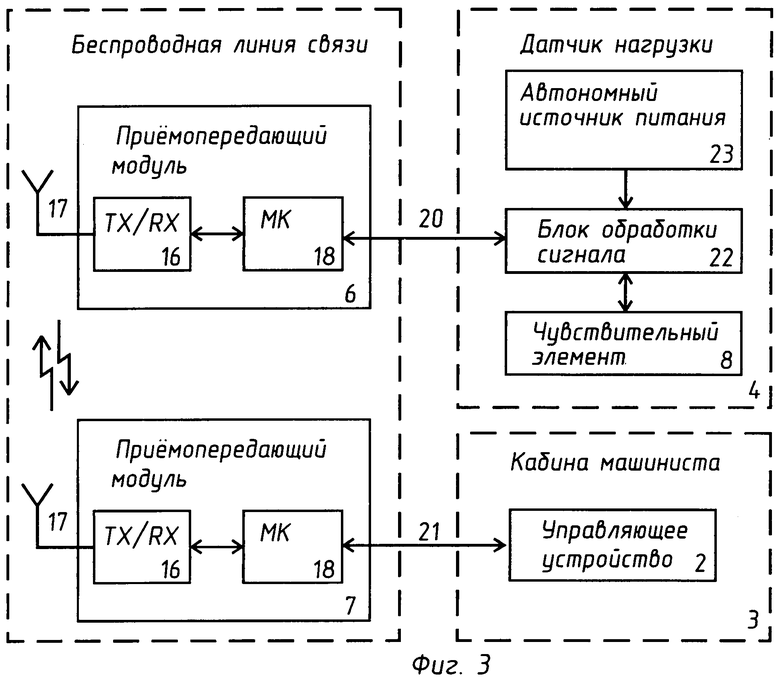
На фиг.1 показан мостовой грузоподъемный кран с указанием на нем мест расположения датчика нагрузки и управляющего устройства; на фиг.2 - общий вид крюковой подвески с установленным в ней датчиком нагрузки; на фиг.3 - функциональная схема ограничителя нагрузки.
Предлагаемый ограничитель нагрузки грузоподъемного крана 1, например мостового типа, содержит управляющее устройство 2, установленное в кабине 3 крана, датчик нагрузки 4, установленный на крюковой подвеске 5, и приемопередающие модули 6, 7, образующие проводной, беспроводной или комбинированный канал передачи (обмена) данных (фиг.1).
Управляющее устройство 2 в общем случае содержит микроконтроллер, запоминающее устройство, дисплей и световые индикаторы предупредительной и аварийной сигнализации, модуль звуковой сигнализации, регистратор параметров работы крана и исполнительный блок, выходы которого соединены с входами управления приводов грузоподъемного крана. Установка управляющего устройства 2 в кабине 3 машиниста (крановщика, оператора) грузоподъемного крана 1 обеспечивает его информацией о величине поднятого груза и других рабочих параметрах грузоподъемного крана 1, позволяет машинисту устанавливать различные режимы работы ограничителя и грузоподъемного крана, а также считывать информацию из регистратора параметров.
Силовоспринимающий и/или чувствительный элемент 8 датчика нагрузки 4 размещен на траверсе 9 крюковой подвески 5 под упорным подшипником 10 крюка 11, или под гайкой 12 крюка 11, или на поверхности траверсы 9, или на внутренней или внешней поверхности щеки 13 в зоне действия нагрузок от траверсы, или под опорой 14 траверсы 9 (фиг.2).
Силовоспринимающий элемент датчика нагрузки 4 выполнен в виде упругого элемента или преобразователя силы в давление, а его чувствительный элемент, соответственно, в виде тензометрического, емкостного, оптического, индуктивного или магнитоупругого преобразователя деформации упругого элемента или давления в электрический сигнал.
Силовоспринимающий и чувствительный элементы датчика нагрузки 4, как правило, конструктивно совмещены. В отдельных случаях они могут быть разделены. Например, в случае, когда силовоспринимающий элемент реализован в виде гидравлического преобразователя силы в давление жидкости, а чувствительный элемент 8 выполнен в виде датчика давления и соединен с ним при помощи трубопровода.
Силовоспринимающий элемент датчика нагрузки 4 с совмещенным или вынесенным чувствительным элементом 8, воспринимающий осевую нагрузку, может иметь кольцевую форму для пропуска через него хвостовика 15 крюка 11.
Чувствительный 8 и/или силовоспринимающий элемент датчика нагрузки 4 может быть выполнен также в виде опоры 14 траверсы 9 или размещен на внутренней или внешней поверхности щеки 13 крюковой подвески 5 с возможностью измерения усилий в щеке 13. Например, на внутреннюю поверхность щеки 13 могут быть наклеены тензорезисторы, с помощью которых осуществляется изменение деформации и, соответственно, силы растяжения, создаваемой нагруженной траверсой 9.
Аналогичным образом, тензорезисторы могут быть наклеены на поверхность траверсы 9. В этом случае нагрузка крана определяется по величине деформации изгиба траверсы 9.
Каждый из приемопередающих модулей 6, 7 беспроводного канала передачи данных содержит радиочастотный приемопередатчик TX/RX 16 с антенной 17 и микроконтроллер 18 с блоком энергонезависимой памяти. Эти модули соединены с датчиком нагрузки и с управляющим устройством с помощью локальных линий связи 20, 21 (фиг.3).
Датчик нагрузки 4 содержит блок обработки выходных сигналов 22 по меньшей мере одного чувствительного элемента 8, выполненный на основе микроконтроллера со встроенным или внешним аналого-цифровым преобразователем и, при необходимости, автономный источник питания 23 - гальванический элемент, гальваническую батарею, или аккумулятор. Если применен аккумулятор, то он оснащен устройством его подзарядки от внешнего источника питания, от напряжения, подаваемого на механизмы грузоподъемного крана, и/или от солнечного элемента.
Датчик нагрузки 4 может также дополнительно содержать устройство контроля электрического напряжения автономного источника питания 23, подключенное к микроконтроллеру или встроенное в него.
С целью увеличения времени автономной работы датчика нагрузки 4 без подзарядки автономного источника питания 23, датчик нагрузки может быть дополнительно оснащен датчиком движения крюковой подвески, выполненным на основе акселерометра и/или гироскопа и подключенным к микроконтроллеру блока обработки сигналов 22. В этом случае с помощью микроконтроллера осуществляется изменение периода измерения нагрузки и/или передачи данных о величине этой нагрузки в зависимости от выходного сигнала датчика движения. В частности, в начале движения крюковой подвески по сигналам прерывания, выводящим микроконтроллер из «спящего» режима.
Модуль приемопередатчика беспроводного или проводного канала передачи данных 6 датчика нагрузки 4 может быть встроен в его микроконтроллер (в блок обработки сигналов 22), а модуль приемопередатчика 7 управляющего устройства 2 - в микроконтроллер управляющего устройства. В этом случае линии связи 20, 21 образованы внутренними соединениями в микроконтроллерах.
Беспроводный канал передачи данных между датчиком нагрузи 4 и управляющим устройством 2 может дополнительно включать в себя активный или пассивный ретранслятор (на чертежах условно не показан).
Датчик нагрузки 4 может быть также оснащен устройством определения его пространственного положения, выполненным, например, с использованием радиочастотных измерителей расстояния приемопередающего модуля 6 до точек с известными координатами, в которых размещены дополнительные приемопередатчики, соединенные с управляющим устройством 2 (с определением расстояний по времени прохождения или амплитуде сигнала).
В этом случае управляющее устройство 2 выполнено с возможностью ограничения зоны допустимых положений крюковой подвески 5 путем формирования предупреждающих сигналов для машиниста и/или сигналов управления приводами грузоподъемного крана, направленных на предотвращение столкновения крюковой подвести 5 и груза 24 с препятствиями.
Ограничитель нагрузки работает следующим образом.
Усилие, действующее на грузозахватный орган 11 (крюк) со стороны груза 24, воспринимается силовоспринимающим и чувствительным элементом 8 датчика нагрузки 4 без каких-либо пересчетов его величины. Результат измерения не зависит от состояния механизмов и узлов грузоподъемного крана и от его кинематической схемы. Сигнал с выхода датчика нагрузки 4 по радиоканалу поступает на вход управляющего устройства 2.
Беспроводная передача и прием данных осуществляется, преимущественно, на частоте 2,4 ГГц на основе международного стандарта IEEE 802.15.4. Этот стандарт в настоящее время является наиболее предпочтительным для работы с датчиками с низким энергопотреблением. Для увеличения дальности связи в условиях ограниченной мощности радиочастотного приемопередатчика 16 может быть использован ретранслятор.
На входы управляющего устройства 2 могут поступать также сигналы с других датчиков параметров работы грузоподъемного крана, например, от датчика предельной высоты подъема крюковой подвески, а также сигналы управления машиниста.
В управляющем устройстве 2 производится сравнение фактической нагрузки на грузозахватном органе 11 крана 1 с паспортной величиной грузоподъемности. Далее микроконтроллер управляющего устройства 2, в зависимости от результатов этого сравнения, выдает на исполнительный блок крана (на его привода), сигнал разрешения или запрещения движений грузоподъемного крана (подъема крюка). Одновременно микроконтроллер формирует предупреждающие и информационные сигналы для машиниста, которые выводятся на дисплей и на модуль звуковой сигнализации.
При наличии на крюковой подвеске датчика ее пространственного положения, управляющее устройство 2 дополнительно осуществляет ограничение сигналов управления приводами крана, обеспечивая реализацию защиты крюковой подвески 5 с грузом 24 от столкновений с препятствиями. При этом зона допустимых положений крюковой подвести предварительно задается машинистом крана с органов управления управляющего устройства 2 и сохраняется в энергонезависимой памяти его микроконтроллера.
Наличие датчика пространственного положения крюковой подвески дополнительно позволяет определить величину вылета стрелового крана или положение тележки мостового или козлового крана. Это обеспечивает реализацию управляющим устройством 2 ограничителя нагрузки для крана, грузоподъемность зависит от вылета или положения тележки по длине моста.
При работе грузоподъемного крана периодически контролируется напряжение автономного источника питания 23. При снижении его величины ниже допустимого значения блоком обработки сигналов 22 и микроконтроллером 18 приемопередающего модуля 6 формируется сигнал, передаваемый в управляющее устройство 2, для отображения сигнала тревоги на дисплее.
Беспроводная линия связи может быть также использована и для передачи управляющих сигналов в датчик нагрузки 4 для изменения его настроечных параметров, присвоения адреса, калибровки, подстройки т.д.
Описанный ограничитель нагрузки грузоподъемного крана является лишь частным примером осуществления изобретения. Изобретение допускает также иные варианты реализации ограничителя при сохранении общего изобретательского замысла, изложенного в формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОГРАНИЧИТЕЛЬ НАГРУЗКИ ГРУЗОПОДЪЕМНОГО КРАНА | 2010 |
|
RU2445252C1 |
| ОГРАНИЧИТЕЛЬ НАГРУЗКИ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2011 |
|
RU2490203C2 |
| Способ обмена информацией между модулями системы безопасности грузоподъемной машины и устройство для его осуществления | 2022 |
|
RU2778173C1 |
| ЭЛЕКТРОННАЯ СИСТЕМА ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2009 |
|
RU2405736C1 |
| ДАТЧИК ФИЗИЧЕСКОЙ ВЕЛИЧИНЫ | 2010 |
|
RU2442964C1 |
| СПОСОБ ПЕРЕДАЧИ ДАННЫХ МЕЖДУ ИЗМЕРИТЕЛЬНЫМ ПРЕОБРАЗОВАТЕЛЕМ И УПРАВЛЯЮЩИМ УСТРОЙСТВОМ И ЛИНИЯ СВЯЗИ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2449940C2 |
| СПОСОБ ОБМЕНА ИНФОРМАЦИЕЙ МЕЖДУ МОДУЛЯМИ СИСТЕМЫ БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И СИСТЕМА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА | 2002 |
|
RU2251524C2 |
| СПОСОБ БЕСПРОВОДНОЙ ПЕРЕДАЧИ ИНФОРМАЦИИ В СИСТЕМЕ БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2282576C2 |
| СПОСОБ РЕГИСТРАЦИИ ПАРАМЕТРОВ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2005 |
|
RU2281240C2 |
| СПОСОБ ОБМЕНА ИНФОРМАЦИЕЙ МЕЖДУ МОДУЛЯМИ СИСТЕМЫ БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2232709C2 |
Изобретение относится к области подъемно-транспортной техники и предназначено для защиты от перегрузок мостовых или стреловых грузоподъемных кранов. Ограничитель содержит датчик нагрузки (4), управляющее устройство (2). Датчик нагрузки (4) размещен на траверсе крюковой подвески (5) под упорным подшипником крюка (11) или на внутренней или на внешней поверхности щеки в зоне действия нагрузок от траверсы, или под опорой траверсы. Достигается повышение безопасности, повышение точности работы ограничителя нагрузки, упрощение технического обслуживания, ремонта и модернизации датчика нагрузки. 15 з.п. ф-лы, 3 ил.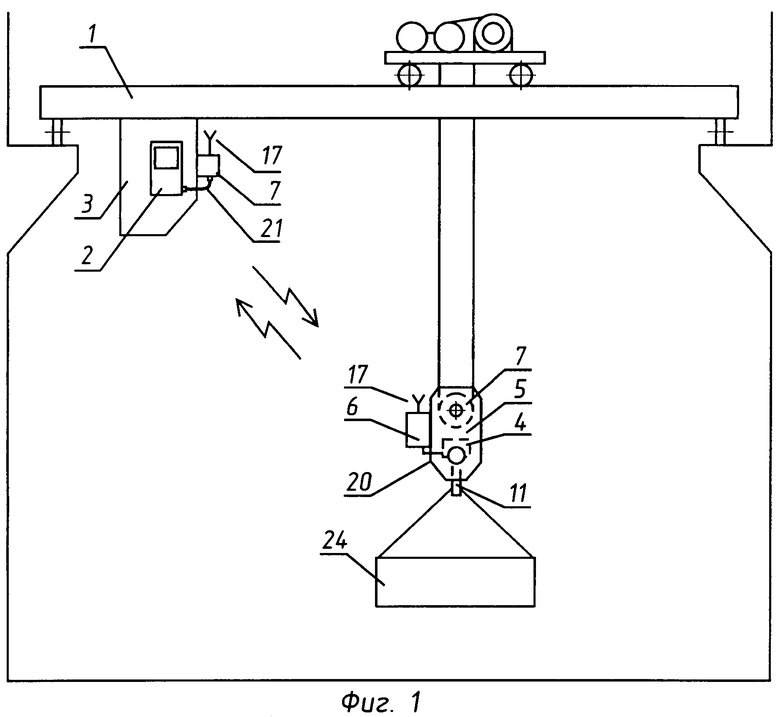
1. Ограничитель нагрузки грузоподъемного крана, содержащий датчик нагрузки, установленный на крюковой подвеске, и управляющее устройство, соединенное с датчиком нагрузки с помощью беспроводного или комбинированного канала передачи данных, и выполненное на основе микроконтроллера с возможностью формирования предупреждающих сигналов для машиниста и сигналов управления приводом подъема крюка, направленных на предотвращение превышения измеренной нагрузки крана ее предельно допустимой величины, отличающийся тем, что по меньшей мере один силовоспринимающий и/или чувствительный элемент датчика нагрузки размещен на траверсе крюковой подвески под упорным подшипником крюка, или на поверхности траверсы, или на внутренней или внешней поверхности щеки в зоне действия нагрузок от траверсы, или под опорой траверсы.
2. Ограничитель по п.1, отличающийся тем, что силовоспринимающий элемент датчика нагрузки выполнен в виде упругого элемента или преобразователя силы в давление, а чувствительный элемент выполнен, соответственно, в виде преобразователя деформации упругого элемента или давления в электрический сигнал.
3. Ограничитель по п.2, отличающийся тем, что преобразователь деформации упругого элемента в электрический сигнал выполнен тензометрическим, или емкостным, или оптическим, или индуктивным, или магнитоупругим.
4. Ограничитель по п.1, отличающийся тем, что силовоспринимающий элемент датчика нагрузки выполнен кольцевым с возможностью пропуска через него хвостовика крюка.
5. Ограничитель по п.1, отличающийся тем, что датчик нагрузки имеет, по меньшей мере, один чувствительный и/или силовоспринимающий элемент, размещенный на внутренней или внешней поверхности щеки крюковой подвески с возможностью измерения усилий в щеке или образующий опору траверсы.
6. Ограничитель по п.1, отличающийся тем, что канал передачи данных между датчиком нагрузки и управляющим устройством включает в себя два подключенных к ним или входящих в их состав проводных или беспроводных приемопередающих модуля.
7. Ограничитель по п.6, отличающийся тем, что каждый из приемопередающих модулей беспроводного канала передачи данных содержит радиочастотный приемопередатчик с антенной и микроконтроллер, выполненный с возможностью хранения в энергонезависимой памяти его индивидуального адреса и/или адреса приемопередатчика, которому предназначена передаваемая информация, а также с возможностью приема и формирования пакетов данных по беспроводному каналу.
8. Ограничитель по п.1, отличающийся тем, что датчик нагрузки содержит блок обработки выходных сигналов по меньшей мере одного чувствительного элемента, выполненный на основе микроконтроллера со встроенным или внешним аналого-цифровым преобразователем, причем при наличии нескольких чувствительных элементов микроконтроллер выполнен с возможностью суммирования их выходных сигналов или определения нагрузки в двух или более плоскостях.
9. Ограничитель по п.8, отличающийся тем, что датчик нагрузки дополнительно содержит автономный источник питания, выполненный в виде гальванического элемента, или гальванической батареи, или аккумулятора.
10. Ограничитель по п.8 или 9, отличающийся тем, что датчик нагрузки дополнительно содержит устройство для контроля электрического напряжения автономного источника питания, подключенное к микроконтроллеру или встроенное в него, причем микроконтроллер дополнительно приспособлен для формирования и передачи в управляющее устройство сигнала о снижении значения этого напряжения ниже допустимого уровня.
11. Ограничитель по п.9, отличающийся тем, что автономный источник питания, выполненный в виде аккумулятора, снабжен устройством его подзарядки от внешнего источника питания, и/или от напряжения, подаваемого на механизмы грузоподъемного крана, и/или от солнечного элемента.
12. Ограничитель по п.8, отличающийся тем, что датчик нагрузки дополнительно оснащен датчиком движения крюковой подвески, выполненным на основе акселерометра и/или гироскопа, причем микроконтроллер выполнен с возможностью изменения периода и/или момента измерения нагрузки и/или передачи данных о величине этой нагрузки в зависимости от выходного сигнала датчика движения.
13. Ограничитель по п.12, отличающийся тем, что датчик движения крюковой подвески выполнен с возможностью формирования сигнала прерывания, выводящего микроконтроллер из «спящего» режима.
14. Ограничитель по п.8, отличающийся тем, модуль приемопередатчика беспроводного или проводного канала передачи данных датчика нагрузки встроен в его микроконтроллер.
15. Ограничитель по п.1, отличающийся тем, что беспроводный канал передачи данных между датчиком нагрузи и управляющим устройством дополнительно включает в себя активный или пассивный ретранслятор.
16. Ограничитель по п.1, отличающийся тем, что датчик нагрузки дополнительно оснащен устройством определения его пространственного положения и выполнен с возможностью передачи информации о положении крюковой подвески в управляющее устройство, которое выполнено с возможностью формирования предупреждающих сигналов для машиниста и/или сигналов управления приводами грузоподъемного крана из условия ограничения зоны допустимых положений крюковой подвески и/или с возможностью изменения предельно допустимой величины нагрузки крана в зависимости от этого положения.
| Машина для сортирования по линейным размерам листового материала | 1954 |
|
SU99473A1 |
| Ограничитель грузоподъемности кранов | 1975 |
|
SU587089A1 |
| EP 1236980 A1, 04.09.2002 | |||
| ВОДКА "ЗОЛОТАЯ ДЮЖИНА ЛЮКС" | 2003 |
|
RU2236450C1 |
| JP 2011102167 A, 26.05.2011 | |||
| Конюхов Н.Е., Медников Ф.М., Нечаевский М.Л | |||
| Электромагнитные датчики механических величин | |||
| - М.: Машиностроение, 1987, с.99-103, фиг.58-61, 256 с | |||
| ил. | |||

