7 13 16 Ю 18 15 12
20
ел
00
to
О) СП
Фиг.2
Изобретение отнисится к подъемно- транспортио1чу машиностроению, в чает- ноет:- к грузоподъемным крюкам, на грузовые Г1од1)ески кото; ;.Х подвешены )i)iOpnpyiouiHt; уст ройгтва.
Цель и- Г Оретемия - повышение надежности .
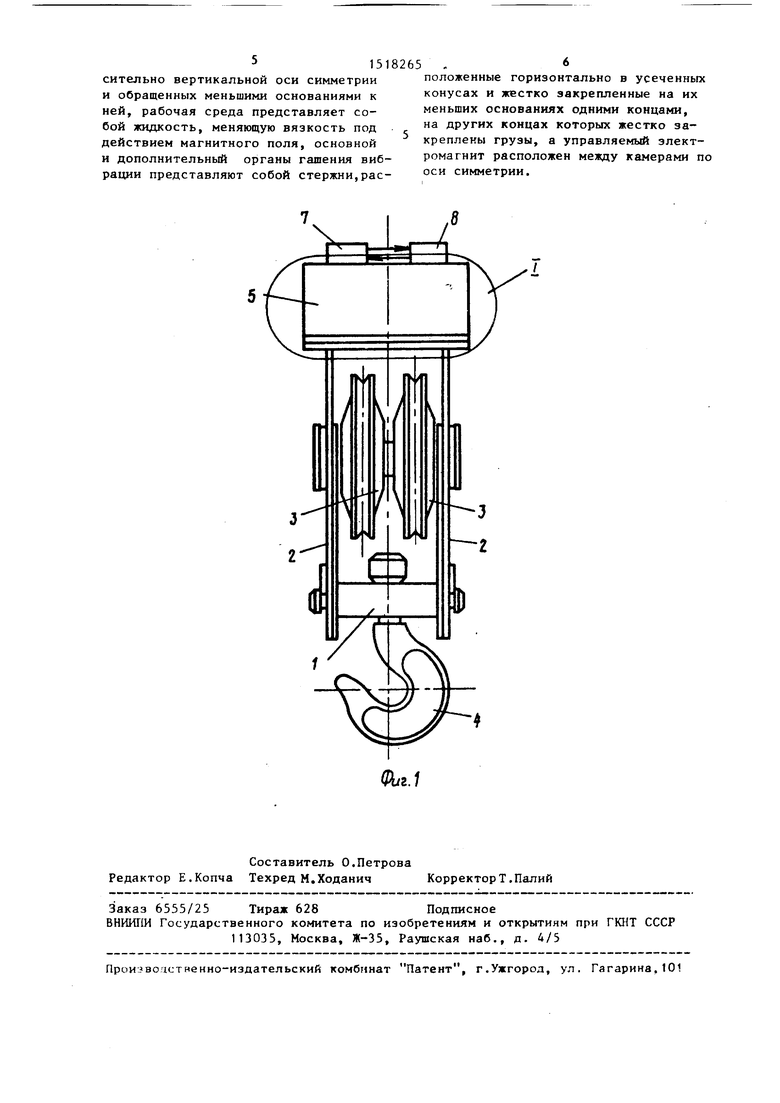
На фиг.1 изображена грузовая подвеска кратки, оСяилй вид; на фиг. 2 - утел на фнг.1, раэре:.
Грузовая подш ска крана содержит обойму 1 со щеками 2, установленные между ними, огибаем1ле тяговыми канатами блоки 3, закрепленный в обойме 1 грузозахр.атиый орг ан 4, установленный над блоками 3 на щеках 2 виброгаситель 5 и систему управления им, включаюгдую управляемый магнит 6, датчик 7 вибрации и управляющее устройство 8. Виброгаситель 5 состоит из двух фигурных крышек 9 и 10, каждая из которых выполнена я виде усеченного конуса, обрашенг1ых друг к другу меньшими основаниями 11 и 12, гибкой боковой с 14 нки 13, .;1.)единяюш,ей боль- игле основания 14 и 15 фигурных крышек 9 и 10 vi i чновленной по их периметру с о6р 5-ь И ; м замюгутой камеры 16. Виброга; ..ь ;. г,кже содержит закреплению I. ;.;им,1 концами 1/ и 18 между мен ь ;:им i .,с кованиями 11 и 12 фигурных Kj .iij(. 9 и 10 iu napHo со- , 19 и 20, вторые , opbix пропущены через тенку 13, и 1 рузы 23 1 Т Ч1рых концах 21 и 19 и 20. Уппавляепряженные . ,ч j . концы 21 и 22 к г ибкую бокс1вун установленные n;i 22 этих стержней
мыи электромагнит Ь размещен по оси симметрии фигурных крышек 9 и 10, а замкнутая камера 16 заполнена рабочей жидкостью, изменяющей свою вязкость под действием магнитного поля.
Обмотка питания управляемого электромагнита 6 включена в систему управления крана.
Устройство работает следующим образом.
Пси подъеме груза или под воздей- стйиом на грузозахватный орган 4 воз мущлющ( и силы вибрирующего груза, :аг1римор вибропогружателя, в колебания 1 ч1влекяются как детали 1-Ь подвески, т-чк и детали 9-23 виброгасителя 5.
Частота колебаний вибрирующего груза фиксируется датчиком 7 вибрации и подается на управляющее уст- pcActBo 8, которое подает питание
0
5
0
5
0
5
0
5
0
5
на обмотку управляемого злект ч,--., г- нита 6. Благодаря этому изменяется вязкость рабочей жидкости, находящейся в замкнутой камере 16, вплоть до затвердевания. Изменение намагниченности рабочей жидкости определяется формой замкнутой камеры 16, в самой узкой части - самое сильное затвердевание. В результате этого жесткость попарно сопряженных стержней 19 и 20 изменяется так, чтобы частота собственных колебаний грузов 23, установленных на вторых концах 21 и 22 стержней 19 и 20,была равна частоте возмущающей силы, т.е. чтобы выполнялось соотнощение
С МР2 ,
где С - жесткость стержней 19 и 20;
М - масса грузов 23;
Р - частота возмущающей силы вибрирующего устройства. При этом детали 1-6 подвески остаются неподвижными, а грузы 23 колеблются (движение может быть как по вертикали, так и по горизонтали) в противофазе с возмущающей силой, т.е. происходит уравновешивание возмущающей силы, приложенной к грузозахватному органу 4, реакцией грузов 23.
Формула изобретения Грузовая подвеска крана, содержащая обойму со щеками, oгибae Iыe тяговым канатом блоки, размещенные между щеками и закрепленные на них посредством горизонтальной поперечной оси, захватный орган, закрепленный в нижней части щек на горизонтальной поперечной оси, виброгасиуель, закрепленный на щеках над блоками,включающий корпус и расположенную в нем камеру, заполненную рабочей средой, расположенный в ней подвижный относительно камеры орган гашения вибраций и управляемый электромагнит для изменения состояния рабочей среды, отличающаяся тем, что, с целью повышения надежности, подвеска снабжена установленной в корпусе дополнительной камерой с рабочей средой и дополнительным органом гашения вибрации, установленным в ней, и грузами, при 5ТОМ основная и дополнительная камеры вьтолнены в виде усеченных конусов, расположенных в корпусе горизонтально, симметрично относительно вертикальной оси симметрии и обращенных меньшими основаниями к ней, рабочая среда представляет собой жидкость, меняющую вязкость под действием магнитного поля, основной и дополнительный органы гашения вибрации представляют собой стержни,расположенные горизонтально в усеченных конусах и жестко закрепленные на их меньших основаниях одними концами, на других концах которых жестко закреплены грузы, а управляемый электромагнит расположен между камерами по оси симметрии.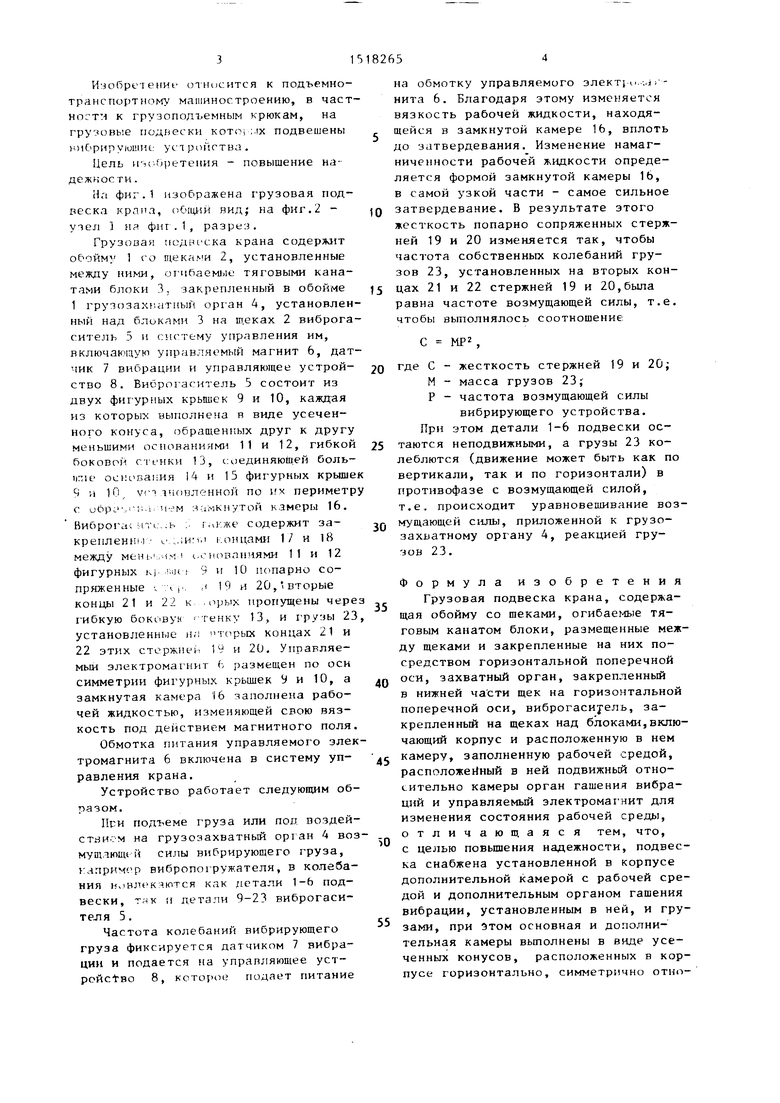
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузовая подвеска крана | 1987 |
|
SU1574529A1 |
| Грузовая подвеска крана | 1982 |
|
SU1030296A1 |
| Грузовая подвеска крана | 1980 |
|
SU893799A2 |
| Грузовая подвеска крана | 1977 |
|
SU635029A1 |
| Грузовая подвеска крана | 1980 |
|
SU929531A1 |
| Крюковая подвеска | 1987 |
|
SU1481184A1 |
| Струнный виброгаситель | 1986 |
|
SU1323793A2 |
| Грузовая подвеска крана | 1982 |
|
SU1025644A1 |
| Устройство для захвата и сброса груза со строповочным элементом | 1988 |
|
SU1625807A1 |
| Виброгаситель | 1989 |
|
SU1798565A1 |
Изобретение относится к подъемно-транспортному машиностроению, в частности к грузоподъемным крюкам, на грузовые подвески которых подвешены вибрирующие устройства. Цель изобретения - повышение надежности. В подвеске корпус виброгасителя образует замкнутую камеру 16, заполненную рабочей жидкостью, изменяющей свою вязкость под действием магнитного поля. Через камеру 16 проходят попарно сопряженные стержни 19 и 20 с грузами 23, установленными с возможностью колебания в вертикальной плоскости в противофазе с возмущающей силой вибрирующего груза на концах 21 и 22 этих стержней. По оси симметрии фигурных крышек 9 и 10, образующих корпус виброгасителя, установлен управляемый электромагнит 6, обмотки питания которого включены в систему управления крана. 2 ил.
| Грузовая подвеска крана | 1982 |
|
SU1030296A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
