Изобретение относится к области гидроакустики, в частности к излучению гидроакустических кодированных сигналов управления.
Задача, которая решается изобретением, заключается в дальнем обнаружении затонувшего морского объекта, его идентификации и определении местоположения, а также подъеме на поверхность моря.
Способ реализуется следующим образом.
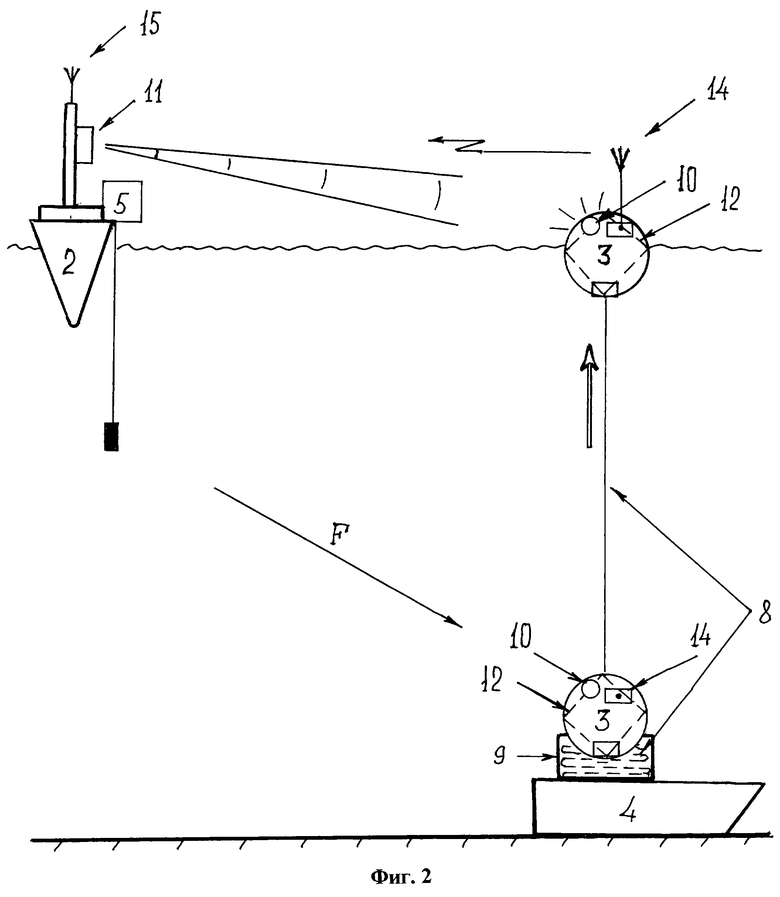
В командном блоке, находящемся на спасательном судне, устанавливается код, соответствующий номеру выбранного исполнительного блока, находящегося на затонувшем морском объекте. В канале излучения гидроакустических кодированных широкополосных сигналов управления командного блока формируется, усиливается и излучается высоконаправленно (единицы градусов) в вертикальной плоскости и слабонаправленно (десятки градусов) в горизонтальной плоскости гидроакустический кодированный широкополосный сигнал управления на частоте F. В канале приема гидроакустических кодированных широкополосных сигналов управления исполнительного блока осуществляется прием, усиление и дешифрация кодированного широкополосного сигнала управления на частоте F, а также подача сигнала управления на механический размыкатель, который отсоединяет исполнительный блок от затонувшего морского объекта. После отсоединения исполнительный блок благодаря своей положительной плавучести начинает всплывать на поверхность моря, при этом разматывается запас троса, предварительно раскрепленный в специальном контейнере. В момент всплытия исполнительного блока на поверхность моря включается проблесковый маяк. На спасательном судне визуально и с помощью навигационной радиолокационной станции осуществляется технический (по отраженным радиолокационным сигналам) поиск исполнительного блока. При этом специальный уголковый отражатель радиолокационных сигналов, размещенный внутри пластикового корпуса, обеспечивает эффективное отражение радиолокационных сигналов.
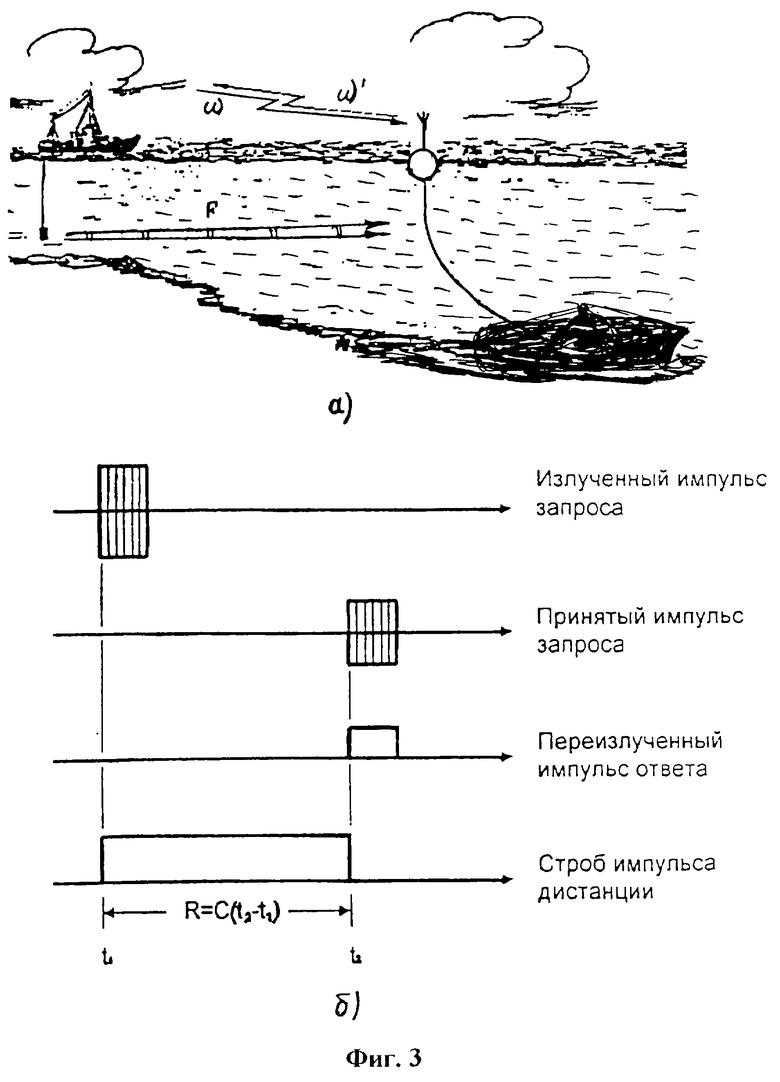
Измерение текущей дистанции осуществляется в блоке измерения текущей дистанции с помощью формирователя строба дистанции. На его первый (запускающий) вход поступает сигнал запроса. Ответный сигнал исполнительного блока, имеющий задержку на время распространения звуковой волны, излученный при помощи радиопередающей антенны и принятый радиоприемной антенной спасательного судна, а также прошедший через устройство обработки ответных сигналов канал приема радиосигнала командного блока, подается на второй (останавливающий) вход формирователя строба дистанции. Таким образом формируется импульс (строб) с длительностью, пропорциональной текущей дистанции от гидроакустического излучателя кодированных широкополосных сигналов управления командного блока до радиопередающей антенны исполнительного блока устройства.
После подъема исполнительного блока и троса на борт спасательного судна осуществляется подъем самого затонувшего морского объекта на поверхность моря при помощи троса.
Известен способ поиска затонувшего морского объекта, заключающийся в визуальном обнаружении морского объекта на дне, сравнении его с эталонным образом и принятии решения об обнаружении затонувшего морского объекта [1].
К недостаткам данного способа относятся:
1. Ограниченная (единицы метров) дальность действия.
2. Сложность в идентификации морского объекта.
3. Невозможность оперативного обозначения местоположения затонувшего морского объекта.
4. Невозможность оперативного поднятия на поверхность моря затонувшего морского объекта.
Известен способ обнаружения затонувшего морского объекта по его вторичному акустическому полю, заключающийся в формировании и излучении в направлении объекта поиска импульсного сигнала ультразвукового диапазона частот, лоцировании объекта поиска, приеме отраженного сигнала (эхосигнала), сравнении его с эталонным сигналом и принятии решения об обнаружении затонувшего морского объекта [2].
К недостаткам данного способа относятся:
1. Ограниченная (сотни метров) дальность действия.
2. Ограниченный угловой сектор наблюдения.
3. Низкая достоверность классификации морских целей.
4. Невозможность оперативного обозначения местоположения затонувшего морского объекта.
5. Невозможность оперативного поднятия на поверхность моря затонувшего морского объекта.
Наиболее близким по технической сущности к заявляемому относится способ (выбранный в качестве способа-прототипа), заключающийся в формировании на поисковом судне гидроакустического кодированного сигнала управления, усилении данного сигнала до необходимого уровня и его ненаправленном излучении, приеме гидроакустического кодированного сигнала управления на подводном объекте, его усилении до необходимого уровня и дешифрации, механическом отсоединении сигнального буя от подводного якоря и его всплытии на поверхность моря, визуальном поиске сигнального буя на поверхности моря [3].
К недостаткам данного способа относятся:
1. Ограниченная (сотни метров) дальность визуального поиска всплывшего сигнального буя на поверхности моря.
2. Невозможность оперативного обозначения местоположения затонувшего морского объекта на поверхности моря.
3. Невозможность оперативного поднятия на поверхность моря затонувшего морского объекта.
Задача, которая решается изобретением, заключается в разработке способа, свободного от перечисленных выше недостатков.
Технический результат предложенного способа заключается в увеличении дальности действия, возможности оперативного обозначения местоположения затонувшего морского объекта и его оперативного подъема на поверхность моря.
Поставленная цель достигается тем, что в известном способе поиска и подъема на поверхность моря затонувшего морского объекта, заключающемся в формировании, усилении и излучении с поискового судна гидроакустического кодированного сигнала управления, приеме, усилении и дешифрации гидроакустического кодированного сигнала управления на затонувшем морском объекте, механическом отсоединении сигнального буя, всплытии сигнального буя на поверхность моря и визуальном поиске сигнального буя на поверхности моря, излучение с поискового судна гидроакустического кодированного сигнала управления осуществляется высоконаправленно (единицы градусов) в вертикальной плоскости и слабонаправленно (десятки градусов) в горизонтальной плоскости, необходимый запас троса заранее размещается в специальном контейнере морского объекта и крепится к его корпусу, отсоединение сигнального буя осуществляется от затонувшего морского объекта, дополнительно осуществляется технический поиск на поверхности моря всплывшего сигнального буя, дополнительно технически осуществляется измерение расстояния между всплывшим сигнальным буем и спасательным судном.
Увеличение дальности действия достигается за счет высоконаправленного (единицы градусов) в вертикальной плоскости и слабонаправленного (десятки градусов) в горизонтальной плоскости излучения гидроакустического кодированного сигнала управления с поискового судна.
Возможность оперативного обозначения местоположения затонувшего морского объекта достигается за счет технического поиска на поверхности моря всплывшего сигнального буя и технического измерения расстояния между всплывшим сигнальным буем и спасательным судном.
Возможность оперативного подъема на поверхность моря затонувшего морского объекта достигается за счет того, что отсоединение сигнального буя осуществляется от затонувшего морского объекта, а необходимый запас троса заранее размещается в специальном контейнере морского объекта и крепится к его корпусу.
Отличительными от прототипа признаками заявляемого способа являются:
1. Излучение с поискового судна гидроакустического кодированного сигнала управления осуществляется высоконаправленно (единицы градусов) в вертикальной плоскости и слабонаправленно (десятки градусов) в горизонтальной плоскости.
2. Необходимый запас троса заранее размещается в специальном контейнере морского объекта и крепится к его корпусу.
3. Отсоединение сигнального буя осуществляется от затонувшего морского объекта.
4. Дополнительно осуществляется технический поиск на поверхности моря всплывшего сигнального буя.
5. Дополнительно технически осуществляется измерение расстояния между всплывшим сигнальным буем и спасательным судном.
Наличие отличительных от прототипа признаков позволяет сделать вывод о соответствии заявляемого способа критерию "новизна".
Анализ известных технических решений с целью обнаружения в них указанных отличительных признаков показал следующее.
Признак 1 является хорошо известным в гидроакустике.
Признаки 2 и 3 являются новым и неизвестно их использование для поиска затонувших морских объектов.
Признак 4 является новыми и неизвестно его использование для поиска затонувших морских объектов.
Признак 3 является новыми и неизвестно его использование для поиска затонувших морских объектов. В то же время данный признак широко используется в радионавигации.
Таким образом, наличие новых существенных признаков в совокупности с известными обеспечивает появление у заявляемого решения нового свойства, не совпадающего со свойствами известных технических решений, - обнаруживать на большом расстоянии от поискового судна затонувший морской объект, оперативно обозначать местоположение затонувшего морского объекта и оперативно поднимать морской объект на поверхность моря.
В данном случае мы имеем новую совокупность признаков и их новую взаимосвязь, причем не простое объединение новых признаков и уже известных в гидроакустике и радионавигации, а именно выполнение операций в предложенной последовательности и приводит к качественно новому эффекту.
Данное обстоятельство позволяет сделать вывод о соответствии разработанного способа критерию "существенные отличия".
На фиг. 1 представлена структурная схема устройства, с помощью которого реализуется способ поиска и подъема на поверхность моря затонувшего морского объекта. Способ реализуется следующим образом (фиг.2, фиг.3).
В командном блоке 1, находящемся на спасательном судне 2, устанавливается код, соответствующий номеру выбранного исполнительного блока 3, находящегося на затонувшем морском объекте 4. В канале излучения гидроакустических кодированных широкополосных сигналов управления 5 командного блока 2 формируется, усиливается и излучается высоконаправленно (единицы градусов) в вертикальной плоскости и слабонаправленно (десятки градусов) в горизонтальной плоскости гидроакустический кодированный широкополосный сигнал управления на частоте F. В канале приема гидроакустических кодированных широкополосных сигналов управления 6 исполнительного блока 3 осуществляется прием, усиление и дешифрация кодированного широкополосного сигнала управления на частоте F, а также подача сигнала управления на механический размыкатель 7, который отсоединяет исполнительный блок 3 от затонувшего морского объекта 4. После отсоединения исполнительный блок 3 благодаря своей положительной плавучести начинает всплывать на поверхность моря, при этом разматывается запас троса 8, предварительно раскрепленный в специальном контейнере 9. В момент всплытия исполнительного блока 3 на поверхность моря включается проблесковый маяк 10. На спасательном судне 2 визуально и с помощью навигационной радиолокационной станции 11 осуществляется технический (по отраженным радиолокационным сигналом) поиск исполнительного блока 3. При этом специальный уголковый отражатель радиолокационных сигналов 12, размещенный внутри пластикового корпуса исполнительного блока 3, обеспечивает эффективное отражение радиолокационных сигналов.
Измерение текущей дистанции осуществляется в блоке измерения текущей дистанции 13 с помощью формирователя строба дистанции. На его первый (запускающий) вход поступает сигнал запроса. Ответный сигнал исполнительного блока 3, имеющий задержку на время распространения звуковой волны, излученный при помощи радиопередающей антенны 14 и принятый радиоприемной антенной 15 спасательного судна 2, а также прошедший через устройство обработки ответных сигналов канал приема радиосигнала 16 командного блока 1, подается на второй (останавливающий) вход формирователя строба дистанции. Таким образом формируется импульс (строб) с длительностью, пропорциональной текущей дистанции от гидроакустического излучателя кодированных широкополосных сигналов управления командного блока 1 до радиопередающей антенны 14 исполнительного блока устройства 3.
После подъема исполнительного блока 3 и троса 8 на борт спасательного судна 2 осуществляется подъем самого затонувшего морского объекта 4 на поверхность моря при помощи троса 8.
Таким образом, преимущество разработанного способа заключается в том, что он позволяет увеличить дальности действия (за счет высоконаправленного в вертикальной плоскости и слабонаправленного в горизонтальной плоскости излучения гидроакустического кодированного сигнала управления с поискового судна), оперативно обозначать местоположения затонувшего морского объекта (за счет технического поиска на поверхности моря всплывшего сигнального буя и технического измерения расстояния между всплывшим сигнальным буем и спасательным судном), оперативно поднимать на поверхность моря затонувший морской объект (за счет того, что отсоединение сигнального буя осуществляется от затонувшего морского объекта, а необходимый запас троса заранее размещается в специальном контейнере морского объекта и крепится к его корпусу).
Испытания способа проводились в 2000 и 2001 годах в заливе Петра Великого (Японское море) при волнении моря до 3...4 баллов и температуре воды от +7 до +21 градусов Цельсия. При том были получены следующие основные результаты:
- дальность действия находилась в пределах 5...8 км, что на 2-3 км больше соответствующего параметра у прототипа;
- точность определения расстояния между судном и исполнительным блоком составляло величину 10...20 м (1-2 длины корпуса судна) на дистанции 3...5 км, что в 1,5-2,0 раза выше соответствующего параметра у прототипа;
- среднее время поиска исполнительного блока на поверхности моря при помощи судовой радиолокационной станции составляло 35...40 сек, что в несколько раз меньше, чем только при визуальном поиске.
Источники информации
1. Автономные необитаемые подводные аппараты. - В.: Дальнаука, ИПМТ ДВО РАН, 2000, с.7-10.
2. Роберт Дж. Урик. Основы гидроакустики. - Л.: Судостроение, 1978, с. 91.
3. Коробов А.А., Левин B.C., Лукочиков А.В. и др. Подводная технология. Л.: Судостроение, 1980, с.20.
Изобретение относится к области гидроакустики, в частности к излучению гидроакустических кодированных сигналов управления. В заявленном способе формируют, усиливают и излучают высоконаправленно в вертикальной плоскости и слабонаправленно в горизонтальной плоскости с поискового судна гидроакустический кодированный сигнал управления, который принимают, усиливают и дешифруют на затонувшем морском объекте, после чего непосредственно от него механически отсоединяется и всплывает на поверхность моря сигнальный буй, при этом необходимый, предварительно раскрепленный запас троса заранее размещен в контейнере и крепится к корпусу затонувшего морского объекта, дополнительно на спасательном судне визуально и с помощью навигационной радиолокационной станции осуществляется технический поиск на поверхности моря всплывшего сигнального буя, а также дополнительно осуществляется техническое измерение расстояния между всплывшим сигнальным буем и спасательным судном, после подъема сигнального буя и троса на борт спасательного судна осуществляется подъем самого затонувшего морского объекта на поверхность моря при помощи троса. Достигаемым техническим результатом изобретения является увеличение дальности действия обнаружения затонувшего морского объекта, его идентификация и определение местоположения, а также подъем на поверхность моря. 3 ил.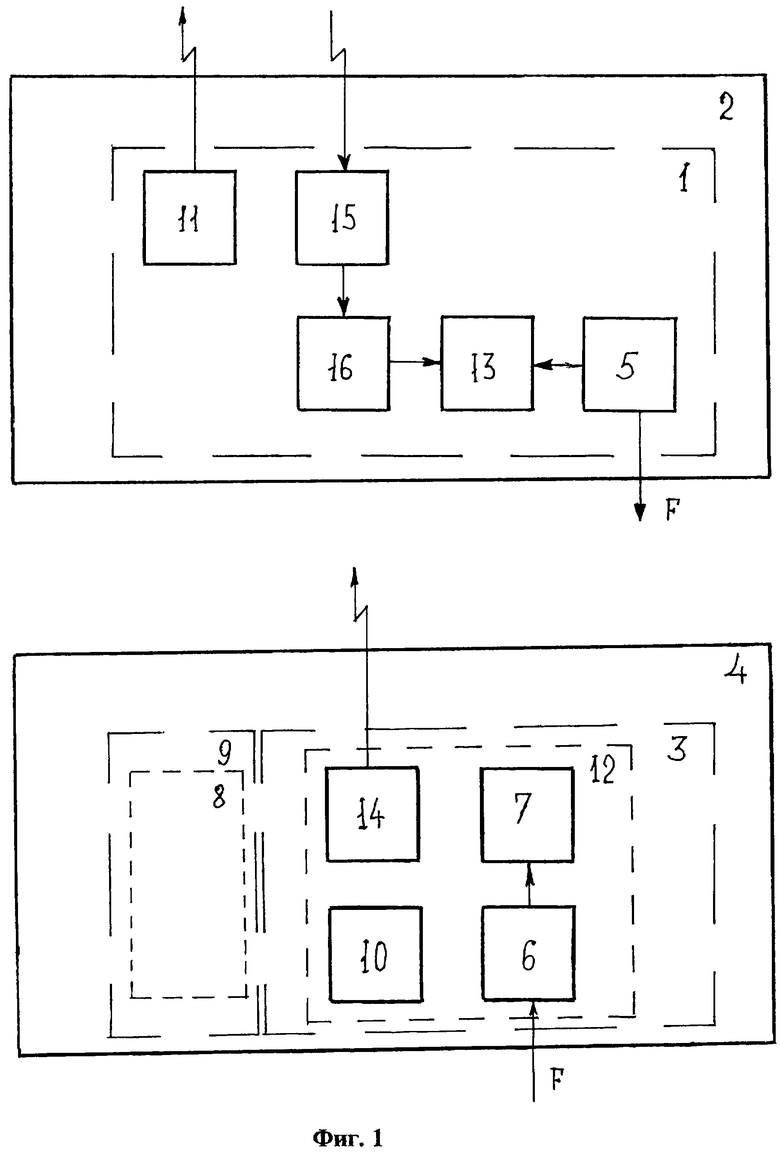
Способ поиска и подъема на поверхность моря затонувшего морского объекта, заключающийся в формировании, усилении и излучении с поискового судна гидроакустического кодированного сигнала управления, приеме, усилении и дешифрации гидроакустического кодированного сигнала управления на затонувшем морском объекте, механическом отсоединении сигнального буя, всплытии сигнального буя на поверхность моря и визуальном поиске сигнального буя на поверхности моря, отличающийся тем, что излучение с поискового судна гидроакустического кодированного сигнала управления осуществляется высоконаправленно в вертикальной плоскости и слабонаправленно в горизонтальной плоскости, механическое отсоединение сигнального буя происходит непосредственно от затонувшего морского объекта, необходимый, предварительно раскрепленный запас троса заранее размещен в контейнере и прикреплен к корпусу затонувшего морского объекта, дополнительно на спасательном судне с помощью навигационной радиолокационной станции осуществляется технический поиск на поверхности моря всплывшего сигнального буя, а также дополнительно осуществляется техническое измерение расстояния между всплывшим сигнальным буем и спасательным судном, после подъема сигнального буя и троса на борт спасательного судна осуществляется подъем самого затонувшего морского объекта на поверхность моря при помощи троса.
| ГИДРОАКУСТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОТСОЕДИНЕНИЯ ПОДВОДНОГО ИЗДЕЛИЯ И ОБОЗНАЧЕНИЯ ЕГО МЕСТОПОЛОЖЕНИЯ | 1997 |
|
RU2128350C1 |
| ГИДРОАКУСТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОТСОЕДИНЕНИЯ ПОДВОДНОГО ИЗДЕЛИЯ И ВИЗУАЛЬНОГО КОНТРОЛЯ ЕГО МЕСТОПОЛОЖЕНИЯ НА ПОВЕРХНОСТИ МОРЯ | 2000 |
|
RU2168184C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ РАССТОЯНИЯ МЕЖДУ СУДНОМ И РАДИОГИДРОАКУСТИЧЕСКИМ БУЕМ | 2000 |
|
RU2168185C1 |
| Способ цис-трансизомеризации радикалов свободных ненасыщенных жирных кислот или их эфиров | 1959 |
|
SU123648A1 |
| US 4905210, 27.02.1990. | |||

