Изобретение относится к области акустики, в частности к излучению гидроакустических кодированных и широкополосных сигналов управления.
Задача, которая решается изобретением, заключается в быстром обнаружении, идентификации и определении местоположения на большой площади затонувшего объекта (ЗО), оперативной подготовке и подъему на поверхность моря или буксировке на мелководье ЗО, а также в кратчайшее время спасения жизни людей, оказавшихся в ЗО.
Способ реализуется следующим образом.
На каждом движущемся ЗО находится один или несколько аварийно-спасательных буев (АСБ). При этом каждый АСБ имеет водонепроницаемый корпус, исключающий затопление АСБ или его механическое повреждение на всех глубинах предполагаемого района использования. При этом необходимый запас троса, обладающего положительной или нулевой плавучестью, в зависимости от типа ЗО, размещен либо вокруг корпуса АСБ, либо в специальном контейнере, прикрепленном к наружной стороне ЗО.
Внутри корпуса АСБ находятся: блоки приема, усиления и дешифрации гидроакустического кодированного сигнала Fкс, блок дешифрации ударных сигналов изнутри ЗО, который подключен к выходу блока усиления параллельно блоку дешифрации гидроакустического кодированного сигнала Fкс, a также механический размыкатель, обеспечивающий требуемое усилие троса после всплытия АСБ на поверхность моря, цифровой накопитель информации, обеспечивающий непрерывную регистрацию всех сигналов, поступающих через блоки приема и усиления от момента срабатывания гидростата АСБ до окончания спасательных работ, радиопередатчик и высокоемкостной блок питания, заряжаемый один раз в год. На корпусе АСБ расположены: радиолокационная антенна, находящаяся в транспортном варианте, гидростат, светоотражатель, отражатель радиолокационных сигналов, фальшфейер и проблесковый маяк.
После наступления форс-мажорных обстоятельств и полного погружения ЗО под воду первый раз срабатывает гидростат и включается электрическое питание соответствующих блоков АСБ. При этом на цифровой накопитель информации начинаются непрерывно регистрироваться все сигналы, поступающие через блоки приема и усиления. Живые люди, оказавшиеся в ЗО, начинают подавать сигналы SOS путем постукивания металлическими предметами о корпус ЗО изнутри.
После принятия аварийного сигнала управления Fsos для всплытия АСБ, его усиления и дешифрации на механический размыкатель подается электрический сигнал управления. После срабатывания механического размыкателя происходит механическое отсоединение АСБ от корпуса ЗО. Благодаря своей плавучести и необходимому запасу троса, предварительно размещенному либо вокруг корпуса АСБ, либо в специальном контейнере, АСБ начинает всплывать на поверхность моря.
На поверхности моря второй раз срабатывает гидростат. При этом на корпусе АСБ происходит механическое распрямление радиолокационной антенны, находящейся до этого в транспортном варианте, и в радиоэфир в импульсном режиме начинают передаваться сигналы ω и кратковременно сигналы, доносящиеся из ЗО. Кроме того, срабатывает фальшфейер и начинает работать проблесковый маяк, а отражатель радиолокационных сигналов, размещенный на корпусе АСБ, обеспечивает эффективное отражение радиолокационных сигналов от навигационной радиолокационной станции.
Полученная от радиопеленгаторов поисково-спасательных объектов (ПСО) и всех поисковых объектов (ПО) информация, а также данные от других источников немедленно передаются в береговой центр. Для поиска ЗО в заданном районе на ближайших ПСО и ПО начинают использовать навигационные радиолокационные станции, а на ПСО и на части ПО дополнительно - блоки формирования, усиления и излучения гидроакустического кодированного сигнала Fкс, а также блок измерения текущей дистанции. Усиливается визуальное наблюдение, а также готовятся к применению устройства буксировки и подъема ЗО на поверхность моря.
В заданном районе дискретно, через каждые 30-50 км, с ПСО и части ПО на «стопе» в воду на глубину 10-15 м по кабель-тросу опускается блок ненаправленного излучения гидроакустического кодированного сигнала Fкс. В блоке формирования устанавливается код, соответствующий номеру АСБ ЗО. В блоке усиления кодовый сигнал Fкс усиливается до требуемого уровня, а с помощью соответствующего блока - ненаправленно излучается гидроакустический кодированный сигнал Fкс.
С помощью блока приема, находящегося внутри корпуса АСБ, осуществляется прием гидроакустического кодированного сигнала Fкс, который затем усиливается до требуемого уровня в блоке усиления и сравнивается с кодовым сигналом в блоке дешифрации кодированного сигнала Fкс. В случае совпадения кода на механический размыкатель подается электрический сигнал управления. После срабатывания механического размыкателя происходит механическое отсоединение АСБ от корпуса ЗО и все операции соответствуют описанным выше.
Измерение текущей дистанции между всплывшим на поверхность моря АСБ и ПСО (ПО) осуществляется с помощью навигационной радиолокационной станции и в блоке технического измерения текущей дистанции с помощью формирователя строба дистанции.
После подъема АСБ и троса на борт ПСО (или ПО), в зависимости от складывающейся ситуации, происходит:
- выбор якорь-цепи ЗО (особенно с большим и средним водоизмещением);
- спуск на ЗО по тросу АСБ механического зацепа с мощным тросом ПСО;
- плавный отрыв ЗО от грунта с помощью троса АСБ, выбранной якорь-цепи ЗО, более мощного троса ПСО и дальнейшая буксировка (в сторону мелководья, навстречу ПСО и т.д.) на безопасной скорости ПСО (ПО);
- подъем ЗО на поверхность моря или на борт ПСО.
При этом спасение людей, оказавшихся в ЗО, начинается уже на этапе подъема ЗО на поверхность моря. В этом случае могут быть выполнены следующие мероприятия:
- люди, находящиеся в воздушной подушке ЗО, выныривают сами или с помощью водолазов ПСО (ПО);
- после фиксации ЗО у борта ПСО (ПО) или на борту ПСО (а также при нахождении ЗО на мелководье) в корпусе ЗО вываривается отверстие в месте нахождения людей и т.д.
Известен способ поиска затонувшего объекта (ЗО), заключающийся в визуальном его обнаружении на дне моря, сравнении его с эталонным образом и принятии решения об обнаружении затонувшего объекта [1].
К недостаткам данного способа относятся:
1. Ограниченная (единицы метров) дальность действия.
2. Сложность в идентификации ЗО.
3. Невозможность оперативного обозначения местоположения ЗО на поверхности моря.
4. Невозможность оперативной подготовки и подъема ЗО на поверхность моря или буксировки на мелководье.
5. Невозможность получения информации о наличии людей в ЗО.
6. Невозможность контроля состояния людей в процессе проведения спасательных работ.
7. Невозможность спасения людей, оказавшихся в ЗО.
Известен способ обнаружения ЗО по его вторичному акустическому полю, заключающийся в формировании и излучении в направлении ЗО импульсного сигнала ультразвукового диапазона частот, лоцировании ЗО, приеме отраженного сигнала (эхо-сигнала), сравнении его с эталонным сигналом и принятии решения об обнаружении ЗО [2].
К недостаткам данного способа относятся:
1. Ограниченная (сотни метров) дальность действия.
2. Ограниченный угловой сектор наблюдения.
3. Низкая достоверность классификации ЗО.
4. Невозможность оперативного обозначения местоположения ЗО на поверхности моря.
5. Невозможность оперативной подготовки и подъема ЗО на поверхность моря или буксировки на мелководье.
6. Невозможность получения информации о наличии людей в ЗО.
7. Невозможность контроля состояния людей в процессе проведения спасательных работ.
8. Невозможность спасения людей, оказавшихся в ЗО.
Наиболее близким по технической сущности к заявляемому относится способ, выбранный в качестве способа-прототипа, заключающийся в формировании, усилении и излучении высоконаправленно в вертикальной плоскости и слабонаправленно в горизонтальной плоскости с поисково-спасательного объекта (ПСО) гидроакустического кодированного сигнала, который принимают, усиливают и дешифруют на ЗО, после чего непосредственно от него механически отсоединяется и всплывает на поверхность моря аварийно-спасательный буй (АСБ), при этом необходимый предварительно раскрепленный запас троса заранее размещен в контейнере или на корпусе АСБ и крепится с одной стороны к корпусу ЗО, а с другой стороны к корпусу АСБ, на ПСО визуально, а также с помощью навигационной радиолокационной станции и радиопеленгатора осуществляется поиск на поверхности моря всплывшего АСБ, а также осуществляется техническое измерение расстояния между всплывшим АСБ и ПСО, после подъема АСБ и троса на борт ПСО осуществляется подъем ЗО на поверхность моря или буксировка его на мелководье при помощи троса [3].
К Недостаткам данного способа относятся:
1. Ограниченная производительность поиска, так как поиск осуществляется с помощью ПСО, скорость хода которого не превышает 30-35 км/ч.
2. Невозможность получения информации о наличии людей в ЗО.
3. Невозможность контроля состояния людей, находящихся в ЗО, в процессе проведения спасательных работ.
4. Низкая эффективность, из-за большого времени поиска, спасения людей, оказавшихся в ЗО.
5. Ограниченная область применения.
Задача, которая решается изобретением, заключается в разработке способа, свободного от перечисленных выше недостатков.
Технический результат предложенного способа заключается в существенном увеличении производительности поиска, возможности получения информации о наличии живых людей в ЗО, контроля их состояния в процессе проведения спасательных работ и высокой эффективности спасения людей, оказавшихся в ЗО.
Поставленная цель достигается тем, что в известном способе поиска и подъема на поверхность моря ЗО, а также спасения людей, оказавшихся в нем, заключающемся в формировании, усилении и излучении с ПСО гидроакустического кодированного сигнала, приеме, усилении и дешифрации гидроакустического кодированного сигнала на ЗО, механическом отсоединении АСБ, всплытии АСБ на поверхность моря, при этом необходимый предварительно раскрепленный запас троса заранее размещен в контейнере или вокруг корпуса АСБ и крепится одной стороной к корпусу ЗО, а другой стороной к корпусу АСБ, на ПСО визуально, а также с помощью навигационной радиолокационной станции и радиопеленгатора осуществляется поиск на поверхности моря всплывшего АСБ, а также осуществляется техническое измерение расстояния между всплывшим АСБ и ПСО, после подъема АСБ и троса на борт ПСО осуществляется подъем самого ЗО на поверхность моря или буксировка его на мелководье при помощи троса, излучение гидроакустического кодированного сигнала осуществляется ненаправленно, дополнительно используют поисковые объекты (ПО) - высокоскоростные надводные, подводные и воздушные суда, космические аппараты, а также самих людей, оказавшихся в затонувшем объекте, дополнительно в качестве сигналов управления для АСБ используют удары изнутри корпуса затонувшего объекта, на всплывшем на поверхность моря АСБ буе дополнительно прослушивают звуки, доносящиеся с ЗО, в качестве ЗО дополнительно используются подводные и воздушные суда, а также наземные транспортные средства.
Существенное (на порядок и более) увеличение производительности поиска достигается за счет того, что поиск ЗО осуществляется не только с помощью ПСО, но и с помощью ПО - высокоскоростных надводных, подводных и воздушных судов, космических аппаратов, а также с помощью самих людей, оказавшихся в ЗО.
Возможность получения информации о наличии живых людей в ЗО достигается за счет того, что на АСБ, находящемся на ЗО, дополнительно в качестве сигналов управления используют удары о корпус ЗО изнутри.
Возможность контроля состояния людей, находящихся в ЗО в процессе проведения спасательных работ, достигается за счет прослушивания звуков, доносящихся из ЗО.
Высокая эффективность спасения людей, оказавшихся в ЗО, достигается за счет существенного (на порядок и более) уменьшения времени поиска ЗО - за счет дополнительного привлечения ПО, а также за счет более оперативного подъема на поверхность моря ЗО или его буксировки на мелководье.
Расширение области применения достигается за счет того, что в качестве ЗО дополнительно используются подводные и воздушные суда, а также наземные транспортные средства.
Отличительными от прототипа признаками заявляемого способа являются:
1. Излучение гидроакустического кодированного сигнала осуществляется ненаправленно.
2. Дополнительно используют ПО, а также самих людей, оказавшихся в ЗО.
3. Дополнительно в качестве ПСО используют подводные суда.
4. Дополнительно в качестве сигналов для всплытия АСБ используют удары изнутри о корпус ЗО.
5. Дополнительно на всплывшем на поверхность моря АСБ непрерывно прослушивают звуки, доносящиеся из ЗО, а также непрерывно регистрируют их.
6. Дополнительно в качестве ЗО используют подводные и воздушные суда, а также наземные транспортные средства.
Наличие отличительных от прототипа признаков позволяет сделать вывод о соответствии заявляемого способа критерию "новизна".
Анализ известных технических решений с целью обнаружения в них указанных отличительных признаков показал следующее.
Признак 1 является хорошо известным в гидроакустике.
Признак 3 и 6 является известным при проведении спасательных работ.
Признаки 2, 4 и 5 являются новыми и неизвестно их использование для поиска ЗО, а также спасения людей, оказавшихся в нем. В то же время признаки 2 и 5 используется при проведении спасательных работ.
Таким образом, наличие новых существенных признаков, в совокупности с известными, обеспечивает появление у заявляемого решения нового свойства, не совпадающего со свойствами известных технических решений - быстро обнаруживать, идентифицировать и определять местоположение на большой площади ЗО, оперативно подготавливать и поднимать на поверхность моря ЗО или буксировать его на мелководье, а также в кратчайшее время спасать жизнь людей, оказавшихся в ЗО.
В данном случае мы имеем новую совокупность признаков и их новую взаимосвязь, причем не простое объединение новых признаков и уже известных, а именно выполнение операций в предложенной последовательности и приводит к качественно новому эффекту.
Данное обстоятельство позволяет сделать вывод о соответствии разработанного способа критерию "существенные отличия".
На фиг.1 представлена функциональная схема устройства при поиске, идентификации (распознавании) и подготовке к подъему на поверхность моря или буксировке на мелководье ЗО.
На фиг.2 представлена структурная схема АСБ.
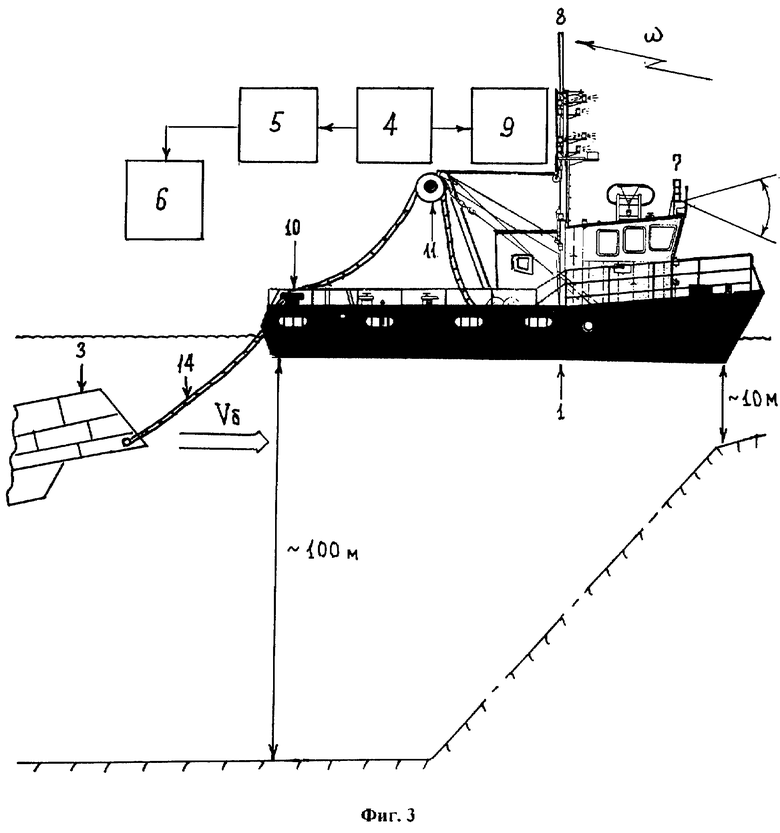
На фиг.3 представлена функциональная схема устройства при подъеме на поверхность моря или буксировке на мелководье ЗО, а также при спасении людей, оказавшихся в ЗО.
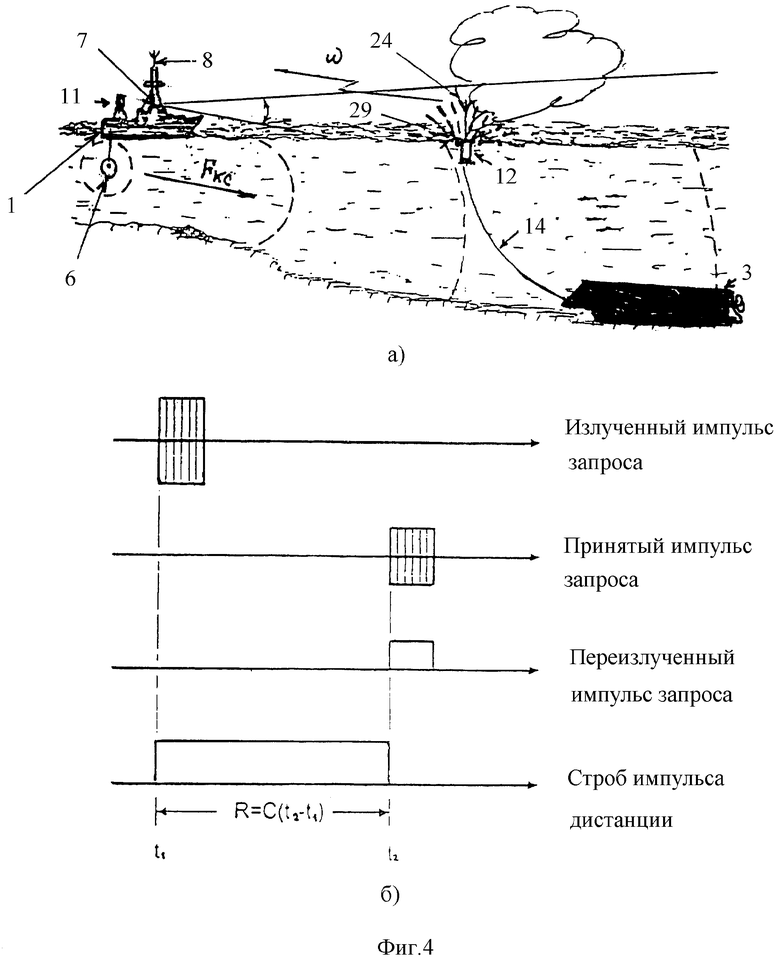
На фиг.4 представлена функциональная схема блока технического измерения текущей дистанции между АСБ ЗО и СО или ПО.
На фиг.5 иллюстрируется внешний вид блоков формирования, усиления и излучения гидроакустического кодированного сигнала и АСБ для мелководных (глубина не более 100 м) районов.
Устройство содержит: ПСО (1), ПО (2) и ЗО (3).
На ПСО (1) в обязательном порядке находятся: блоки формирования (4), усиления (5) и излучения (6) гидроакустического кодированного сигнала Fкс, навигационная радиолокационная станция (7), радиопеленгатор (8) радиолокационных сигналов ω, блок технического измерения текущей дистанции (9), а также устройство для буксировки судна (10) и устройство (11) для подъема ЗО на поверхность моря.
На ПО (2) в обязательном порядке находится навигационная радиолокационная станция (7), а в необязательном порядке находятся: радиопеленгатор (8) радиолокационных сигналов ω, блоки формирования (4), усиления (5) и излучения (6) гидроакустического кодированного сигнала Fкс, блок технического измерения текущей дистанции (9), а также устройство (10) для буксировки судна.
На ЗО (3) находится АСБ (12), имеющий водонепроницаемый корпус (13), необходимый запас троса (14), который размещен в зависимости от особенности ЗО (3) либо вокруг корпуса (13) АСБ (12), либо в специальном контейнере (15), прикрепленном к наружной стороне ЗО (3).
Внутри корпуса (13) АСБ (12) находятся: блоки приема (16), усиления (17) и дешифрации (18) гидроакустического кодированного сигнала Fкс, дешифрации (19) ударных сигналов изнутри ЗО (3), механический размыкатель (20), цифровой накопитель информации (21), радиопередатчик (22) и высокоемкостной блок питания (23), заряжаемый один раз в год и обеспечивающий питанием блоки усиления (17), дешифрации (18) и (19) сигналов, механический размыкатель (20), цифровой накопитель информации (21) и радиопередатчик (22), а также проблесковый маяк (29), расположенный на корпусе (13) АСБ (12). На корпусе (13) АСБ (12) также расположены: радиолокационная антенна (24), находящаяся в транспортном варианте (сложенная), гидростат (25), светоотражатель (26), отражатель радиолокационных сигналов (27), фальшфейер (28) и проблесковый маяк (29).
Способ реализуется следующим образом (фиг.1 - фиг.4).
На каждом движущемся ЗО (3), в качестве которого могут использоваться воздушные (самолеты, вертолеты и др.), надводные (корабли, суда на воздушных подушках и др.) и подводные (туристические и военные подводные лодки, обитаемые подводные аппараты и др.) суда, а также наземные транспортные средства (например, автомобили, выезжающие на лед моря, озера и т.д.), в наиболее оптимальном (по конструктивным соображениям ЗО, особенности реализации способа в данном районе и т.д.) месте находится один или несколько (в зависимости от важности ЗО, его размеров и т.д.) АСБ (12). Каждый АСБ имеет водонепроницаемый корпус (13), исключающий затопление АСБ или его механическое повреждение на всех глубинах предполагаемого района использования. Для прибрежных районов, например, корпус АСБ может быть изготовлен из стеклопластика, а для океанских районов - из титана и т.д. При этом необходимый запас троса (14), обладающего положительной или нулевой плавучестью, в зависимости от типа ЗО (3) размещен либо вокруг корпуса (13) АСБ (12), либо в специальном контейнере (15), прикрепленном к наружной стороне ЗО (3). В любом случае должно быть обеспечено свободное (исключающее запутывание и т.д.) разматывания троса в момент всплытия АСБ на поверхность моря.
Внутри корпуса (13) АСБ (12) находятся: блоки приема (16), усиления (17) и дешифрации (18) гидроакустического кодированного сигнала Fкс, блок дешифрации (19) ударных сигналов изнутри ЗО, который подключен к выходу блока усиления (17) параллельно блоку дешифрации (18), а также механический размыкатель (20), обеспечивающий требуемое усилие (ударные нагрузки от волнения, ветра и т.д.) троса после всплытия АСБ (12) на поверхность моря, цифровой накопитель информации (21), обеспечивающий непрерывную регистрацию всех сигналов, поступающих через блоки приема (16) и усиления (17) от момента срабатывания гидростата (25) АСБ (12) до окончания спасательных работ, радиопередатчик (22) и высокоемкостной блок питания (23), заряжаемый один раз в год. На корпусе (13) АСБ (12) расположены: радиолокационная антенна (24), находящаяся в транспортном варианте (сложенная), гидростат (25), светоотражатель (26), отражатель радиолокационных сигналов (27), фальшфейер (28) и проблесковый маяк (29).
После наступления форс-мажорных обстоятельств (падение воздушного судна, потопления надводного судна и т.д.) и полного погружения ЗО под воду (после которого исключается его дальнейшее переворачивание и т.д.) первый раз срабатывает гидростат, т.к. внешнее давлении превысило атмосферное на несколько долей атм (например, 0,5 атм - 5 м глубины и т.д.) и включается электрическое питание соответствующих блоков АСБ. При этом на цифровой накопитель информации (21) начинают непрерывно регистрироваться все сигналы, поступающие через блоки приема (16) и усиления (17).
Живые люди, оказавшиеся в различных местах ЗО, начинают подавать аварийные сигналы SOS путем постукивания металлическими предметами о корпус ЗО (3) изнутри.
После принятия аварийных сигналов управления Fsos для всплытия АСБ (чередование пауз и серий металлических ударов изнутри ЗО о его корпус и др.), которые заранее обозначены в специальных местах на ЗО (например, в местах вероятного нахождения людей в момент сна, вахты и т.д.), его усиления и дешифрации (сравнении с заранее определенным эталоном), на механический размыкатель (20) подается электрический сигнал управления.
После срабатывания механического размыкателя (20) происходит механическое отсоединение АСБ (12) от корпуса ЗО (3). Благодаря своей плавучести и необходимому запасу троса (14), предварительно размещенному либо вокруг корпуса (13) АСБ (12), либо в специальном контейнере (15), АСБ (12) начинает всплывать на поверхность моря.
На поверхности моря второй раз срабатывает гидростат (внешнее давление стало равным атмосферному). При этом на корпусе (13) АСБ (12) происходит механическое распрямление радиолокационной антенны (24), находящейся до этого момента времени в транспортном варианте, и в радиоэфир в импульсном (длительность импульса составляет доли секунды) режиме начинают передаваться сигналы ω и кратковременно (например, 1 раз за 4 часа в течение 10 сек и т.д.) сигналы, доносящиеся из ЗО (3): металлические удары о корпус ЗО изнутри и др. Кроме того, срабатывает фальшфейер (28) и начинает работать проблесковый маяк (29), а отражатель радиолокационных сигналов (27), размещенный на корпусе (13) АСБ (12), обеспечивает эффективное отражение радиолокационных сигналов от навигационной радиолокационной станции (7).
Сигналы на частоте ωi (например, i=1 - для пассажирского судна «Европа», i=2 - для воздушного борта «1313», i=3 - для рыболовного сейнера «Бор» и т.д.) начинают принимать радиопеленгаторы ближайших ПСО (1) и ПО (2).
Полученная от радиопеленгаторов (8) ПСО (1) и всех ПО (2) информация, а также данные от других источников (диспетчера, случайные свидетели и т.д.) немедленно передаются в береговой центр. Для поиска ЗО (3) в заданном (предполагаемом) районе на ближайших ПСО (1) и ПО (2) начинают использовать навигационные радиолокационные станции (7), на ПСО (1) и на части ПО (2) дополнительно - блоки формирования (4), усиления (5) и излучения (6) гидроакустического кодированного сигнала Fкс, а также блок измерения текущей дистанции (9). Усиливается визуальное наблюдение, а также готовятся к применению (прогреваются и т.д.) устройство для буксировки судна (10) и устройство (11) для подъема ЗО на поверхность моря.
В заданном районе дискретно, через каждые 30-50 км (дальность действия в заданном районе кодированного сигнала Fкс), с ПСО (1) и части ПО (2) на стопе судна (в режиме «зависания» вертолета и т.д.) в воду на глубину 10-15 м по кабель-тросу опускается блок (6).
В блоке формирования (4) устанавливается код, соответствующий номеру АСБ (12) ЗО (3). В блоке усиления (5) кодовый сигнал Fкс усиливается до требуемого уровня, а с помощью блока (6) ненаправленно (в том числе и в сторону ЗО) излучается гидроакустический кодированный сигнал Fкс.
С помощью блока приема (16), находящегося внутри корпуса (13) АСБ (12), осуществляется прием гидроакустического кодированного сигнала Fкс, который затем усиливается до требуемого уровня в блоке усиления (17) и сравнивается с кодовым сигналом в блоке дешифрации (18) гидракустического кодированного сигнала Fкс. В случае совпадения кода на механический размыкатель (20) подается электрический сигнал управления.
После срабатывания механического размыкателя (20) происходит механическое отсоединение АСБ (12) от корпуса ЗО (3). Благодаря своей плавучести и необходимому запасу троса (14), предварительно размещенному либо вокруг корпуса (13) АСБ (12), либо в специальном контейнере (15), АСБ (12) начинает всплывать на поверхность моря.
На поверхности моря второй раз срабатывает гидростат (внешнее давление стало равным атмосферному). При этом на корпусе (13) АСБ (12) происходит механическое распрямление радиолокационной антенны (24), находящейся до этого момента времени в транспортном варианте, и в радиоэфир в импульсном (длительность импульса составляет доли секунды) режиме начинают передаваться сигналы ω и кратковременно (например, 1 раз за 4 часа в течение 10 сек и т.д.) сигналы, доносящиеся из ЗО (3): металлические удары о корпус ЗО изнутри и др. Кроме того, срабатывает фальшфейер (28) и начинает работать проблесковый маяк (29), а отражатель радиолокационных сигналов (27), размещенный на корпусе (13) АСБ (12), обеспечивает эффективное отражение радиолокационных сигналов от навигационной радиолокационной станции (7).
Измерение текущей дистанции осуществляется в блоке технического измерения текущей дистанции (9) с помощью формирователя строба дистанции (фиг.4). На его первый (запускающий) вход поступает сигнал запроса Fкс. Ответный сигнал ω АСБ (12), имеющий задержку на время распространения гидроакустического кодированного сигнала Fкс, излученный при помощи радиопередающей антенны (24) и принятый радиопеленгатором (8) ПСО (1), или (и) ПО (2), а также прошедший через устройство обработки ответных сигналов блока технического измерения текущей дистанции (9), подается на второй (останавливающий) вход формирователя строба дистанции. Таким образом формируется импульс (строб) с длительностью, пропорциональной текущей дистанции от блока (6) ненаправленного излучения гидроакустического кодированного сигнала Fкс до радиопередающей антенны (24) АСБ (12).
После подъема АСБ (12) и троса (14) на борт ПСО (или ПО), в зависимости от складывающейся ситуации (определяется удаленностью места катастрофы от берега, составом сил и средств спасения и другими условиями):
- выбор якорь-цепи ЗО (особенно с большим и средним водоизмещением);
- спуск на ЗО (особенно с большим и средним водоизмещением) по тросу (14) механического зацепа с более мощным тросом ПСО;
- плавный отрыв ЗО (3) от грунта с помощью троса (14), или выбранной якорь-цепи ЗО, или с помощью более мощного троса ПСО и дальнейшая буксировка (в сторону ближайшего мелководья, острова, берега, навстречу ПСО и т.д.) на максимально безопасной скорости ПСО (ПО);
- подъем ЗО на поверхность моря или на борт ПСО (1).
При этом спасение людей, оказавшихся в ЗО, начинается уже на этапе подъема ЗО на поверхность моря. В этом случае могут быть выполнены следующие мероприятия:
- люди, находящиеся в воздушной подушке ЗО, выныривают сами или с помощью водолазов ПСО (ПО);
- после фиксации ЗО у борта ПСО (ПО) или на борту ПСО (а также при нахождении ЗО на мелководье) в корпусе ЗО вываривается отверстие в месте нахождения людей и т.д.
Таким образом, преимущество разработанного способа заключается в следующем.
Существенное (на порядок и более) увеличение производительности поиска достигнуто за счет того, что поиск ЗО осуществляется не только с помощью ПСО, но и с помощью ПО - высокоскоростных надводных, подводных и воздушных судов, космических аппаратов, а также с помощью самих людей, оказавшихся в ЗО.
Возможность получения информации о наличии живых людей в ЗО достигнута за счет того, что на АСБ, находящемся на ЗО, дополнительно в качестве сигналов управления используют удары о корпус ЗО изнутри.
Возможность контроля состояния людей, находящихся в ЗО в процессе проведения спасательных работ, достигнута за счет прослушивания звуков, доносящихся из ЗО.
Высокая эффективность спасения людей, оказавшихся в ЗО, достигнута за счет существенного (на порядок и более) уменьшения времени поиска ЗО - за счет дополнительного привлечения ПО, а также за счет более оперативного подъема на поверхность моря ЗО или его буксировки на мелководье.
Расширение области применения достигнуто за счет того, что в качестве ЗО дополнительно используются подводные и воздушные суда, а также наземные транспортные средства.
Морские испытания способа проводились в 2004 и 2005 годах в Авачинском заливе п-ова Камчатка при волнении моря до 3...4 баллов и температуре воды от +5 до +18 градусов Цельсия. При том были получены следующие основные результаты:
- дальность действия находилась в пределах 15...30 км;
- точность определения расстояния между ПСО (ПО) и АСБ составляла 10...20 м (1-2 длины корпуса судна) на дистанции 7...10 км;
- среднее время поиска АСБ на поверхности моря при помощи судовой радиолокационной станции на дистанции 7...10 км не превышало 1 мин.
На фиг.5 иллюстрируется внешний вид используемых в процессе испытаний блоков формирования, усиления и излучения гидроакустического кодированного сигнала и АСБ.
Литература
1. Автономные необитаемые подводные аппараты. - В.: Дальнаука, ИПМТ ДВО РАН, 2000, с.7-10.
2. Роберт Дж. Урик Основы гидроакустики. - Л.: Судостроение, 1978, с.91.
3. Бахарев С.А. Способ поиска и подъема на поверхность моря затонувшего морского объекта. - Патент РФ на изобретение №2211256, заявка №2001124526 от 03. 09.2001 г.

Изобретение относится к области акустики, в частности к излучению гидроакустических кодированных и широкополосных сигналов управления. Задача, которая решается изобретением, заключается в быстром обнаружении, идентификации и определении местоположения на большой площади затонувшего объекта (ЗО), оперативной подготовке и подъему на поверхность моря или буксировке на мелководье ЗО, а также в кратчайшее время спасения жизни людей, оказавшихся в ЗО. Способ реализуется следующим образом. На каждом движущемся ЗО находится один или несколько аварийно-спасательных буев (АСБ). При этом каждый АСБ имеет водонепроницаемый корпус, исключающий затопление АСБ или его механическое повреждение на всех глубинах предполагаемого района использования. При этом необходимый запас троса, обладающего положительной или нулевой плавучестью, в зависимости от типа ЗО, размещен либо вокруг корпуса АСБ, либо в специальном контейнере, прикрепленном к наружной стороне ЗО. Внутри корпуса АСБ находятся: блоки приема, усиления и дешифрации гидроакустического кодированного сигнала Fкс, блок дешифрации ударных сигналов изнутри ЗО, который подключен к выходу блока усиления параллельно блоку дешифрации гидроакустического кодированного сигнала Fкс, а также механический размыкатель, обеспечивающий требуемое усилие троса после всплытия АСБ на поверхность моря, цифровой накопитель информации, обеспечивающий непрерывную регистрацию всех сигналов, поступающих через блоки приема и усиления от момента срабатывания гидростата АСБ до окончания спасательных работ, радиопередатчик и высокоемкостной блок питания, заряжаемый один раз в год. На корпусе АСБ расположены: радиолокационная антенна, находящаяся в транспортном варианте, гидростат, светоотражатель, отражатель радиолокационных сигналов, фальшфейер и проблесковый маяк. 5 ил.
Способ поиска и подъема на поверхность моря затонувшего объекта, а также спасения людей, оказавшихся в нем, заключающийся в формировании, усилении и излучении с поисково-спасательного объекта гидроакустического кодированного сигнала, приеме, усилении и дешифрации гидроакустического кодированного сигнала на затонувшем объекте, механическом отсоединении аварийно-спасательного буя, всплытии аварийно-спасательного буя на поверхность моря, при этом необходимый, предварительно раскрепленный запас троса заранее размещен в контейнере или вокруг корпуса аварийно-спасательного буя и крепится одной стороной к корпусу затонувшего объекта, а другой стороной к корпусу аварийно-спасательного буя, на поисково-спасательном объекте визуально, а также с помощью навигационной радиолокационной станции и радиопеленгатора осуществляется поиск на поверхности моря всплывшего аварийно-спасательного буя, а также осуществляется техническое измерение расстояния между всплывшим аварийно-спасательным буем и поисково-спасательным объектом, после подъема аварийно-спасательного буя и троса на борт поисково-спасательного объекта осуществляется подъем самого затонувшего объекта на поверхность моря или буксировка его на мелководье при помощи троса, отличающийся тем, что излучение гидроакустического кодированного сигнала осуществляется ненаправленно, дополнительно используют поисковые объекты - высокоскоростные надводные, подводные и воздушные суда, космические аппараты, а также самих людей, оказавшихся в затонувшем объекте, дополнительно в качестве сигналов управления для аварийно-спасательного буя используют удары изнутри корпуса затонувшего объекта, на всплывшем на поверхность моря аварийно-спасательном буе дополнительно прослушивают звуки, доносящиеся с затонувшего объекта, в качестве затонувшего объекта дополнительно используются подводные и воздушные суда, а также наземные транспортные средства.
| СПОСОБ ПОИСКА И ПОДЪЕМА НА ПОВЕРХНОСТЬ МОРЯ ЗАТОНУВШЕГО МОРСКОГО ОБЪЕКТА | 2001 |
|
RU2221256C2 |
| СПОСОБ ОБНАРУЖЕНИЯ АВАРИЙНОГО ПОДВОДНОГО ОБЪЕКТА, ЛЕЖАЩЕГО НА ГРУНТЕ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2233230C2 |
| БУЙКОВАЯ СИСТЕМА | 1991 |
|
RU2029708C1 |
| JP 2000103391 А, 11.04.2000. | |||

