Изобретение относится к области акустики, в частности к излучению гидроакустических кодированных сигналов управления.
Задача, которая решается изобретением, заключается в быстром обнаружении на большой площади, оперативной подготовке к подъему, в том числе в неблагоприятных погодно-климатических: ветер, туман и др., и гидрофизических: развитое волнение моря, сильные подводные течения и др., условиях, и подъему на поверхность моря объекта, установленного ранее на морском дне, при минимальных финансово-временных затратах.
Известен способ поиска и подъема на поверхность моря объекта, установленного ранее на морском дне, заключающийся в спуске с судна водолаза под воду, визуальном обнаружении водолазом объекта на дне моря, последовательном присоединении водолазом металлических тросов, спущенных под воду с борта судна, к каждому из якорей объекта, последовательном поднятии на борт судна каждого из тросов и якорей объекта, а затем и самого объекта путем одновременного поднятия на борт судна всех его якорь-цепей [1, 2, 3 и 4].
К недостаткам данного способа относятся:
1. Низкая производительность поиска.
2. Невозможность реализации способа на больших (более 120 м) глубинах.
3. Невозможность реализации способа при развитом (более 4-5 баллов или при скорости ветра более 20 м/с) волнении моря.
4. Невозможность реализации способа при сильных (более 4-5 узлов или 7-8 км/ч) подводных течениях.
5. Длительность процесса присоединения тросов к якорям при их заиливании (наносе ила и песка).
6. Высокая стоимость.
7. Потенциальная опасность для жизни, здоровья водолаза и др.
Известен способ поиска и подъема на борт судна объекта, установленного ранее на морском дне, заключающийся в спуске с судна необитаемого подводного аппарата (НПА) под воду, визуальном или техническом обнаружении объекта на дне моря, последовательном присоединении манипулятором НПА тросов, последовательно опущенных под воду с борта судна, к каждому из якорей объекта, последовательном поднятии на борт судна каждого из тросов и якорей объекта, а затем и самого объекта путем одновременного поднятия на борт судна всех его якорь-цепей [1, 2, 3 и 5].
К недостаткам данного способа относятся:
1. Ограниченная производительность поиска.
2. Ограниченная возможность реализации способа при развитом (более 4-5 баллов или при скорости ветра более 20 м/с) волнении моря.
4. Ограниченная возможность реализации способа при сильных (более 4-5 узлов или 7-8 км/ч) подводных течениях.
5. Длительность процесса присоединения тросов к якорям при их заиливании (наносе песком).
6. Высокая стоимость и др.
Задача, которая решается изобретением, заключается в разработке способа, свободного от перечисленных выше недостатков.
Технический результат предложенного способа заключается в значительном - в несколько десятков раз, увеличении производительности поиска, в существенном - в несколько раз, уменьшении времени подготовки объекта к подъему, а также в расширении области применения - использование в неблагоприятных погодно-климатических: ветер, туман и др., и гидрофизических: развитое волнение моря, сильные подводные течения и др., условиях.
Согласно предложенному изобретению способ поиска и подъема на поверхность моря объекта, установленного ранее на морском дне, заключается в формировании, усилении и ненаправленном излучении с судна первого гидроакустического кодированного сигнала управления на частоте F1, приеме, усилении и дешифрации первого гидроакустического кодированного сигнала управления на частоте F1 в первом радиогидроакустическом буе (РГАБ), обладающем собственной положительной плавучестью, механическом отсоединении первого РГАБ от первого дополнительного груза, всплытии первого РГАБ на поверхность моря, при этом необходимый запас первого крепкого фала, предварительно уложенный петлей на морском дне и соединенный своей центральной частью с первым дополнительным грузом, закреплен одной стороной с последовательно механически соединенными: первым тросом, первым якорем, первой якорь-цепью и первым углом (или первой стороной) объекта, а другой стороной с корпусом первого РГАБ, на судне визуально, а также с помощью навигационной радиолокационной станции и радиопеленгатора осуществляют поиск на поверхности моря всплывшего первого РГАБ, а также осуществляют техническое измерение расстояния между всплывшим первым РГАБ и судном, после подъема первого РГАБ и первого крепкого фала с первым дополнительным грузом на борт судна последовательно поднимают первый основной груз, первый трос, первый якорь, первую якорь-цепь и первый угол самого объекта, установленного ранее на морском дне, в формировании, усилении и ненаправленном излучении с судна второго гидроакустического кодированного сигнала управления на частоте F2, приеме, усилении и дешифрации второго гидроакустического кодированного сигнала управления на частоте F2 во втором РГАБ, обладающем собственной положительной плавучестью, механическом отсоединении второго РГАБ от второго дополнительного груза, всплытии второго РГАБ на поверхность моря, при этом необходимый запас второго крепкого фала, предварительно уложенный петлей на морском дне и соединенный своей центральной частью со вторым дополнительным грузом, закреплен одной стороной с последовательно механически соединенными: вторым тросом, вторым якорем, второй якорь-цепью и вторым углом объекта, а другой стороной с корпусом второго РГАБ, на судне визуально, а также с помощью навигационной радиолокационной станции и радиопеленгатора осуществляют поиск на поверхности моря всплывшего второго РГАБ, а также осуществляют техническое измерение расстояния между всплывшим вторым РГАБ и судном, после подъема второго РГАБ и второго крепкого фала со вторым дополнительным грузом на борт судна последовательно поднимают второй основной груз, второй трос, второй якорь, вторую якорь-цепь и второй угол самого объекта, установленного ранее на морском дне, в формировании, усилении и ненаправленном излучении с судна третьего гидроакустического кодированного сигнала управления на частоте F3, приеме, усилении и дешифрации третьего гидроакустического кодированного сигнала управления на частоте F3 в третьем РГАБ, обладающем собственной положительной плавучестью, механическом отсоединении третьего РГАБ от третьего дополнительного груза, всплытии третьего РГАБ на поверхность моря, при этом необходимый запас третьего крепкого фала, предварительно уложенный петлей на морском дне и соединенный своей центральной частью с третьим дополнительным грузом, закреплен одной стороной с последовательно механически соединенными: третьим тросом, третьим якорем, третьей якорь-цепью и третьим углом объекта, а другой стороной с корпусом третьего РГАБ, на судне визуально, а также с помощью навигационной радиолокационной станции и радиопеленгатора осуществляют поиск на поверхности моря всплывшего третьего РГАБ, а также осуществляют техническое измерение расстояния между всплывшим третьим РГАБ и судном, после подъема третьего РГАБ и третьего крепкого фала с третьим дополнительным грузом на борт судна последовательно поднимают третий основной груз, третий трос, третий якорь, третью якорь-цепь и третий угол самого объекта, установленного ранее на морском дне, при этом подъем на борт судна всех трех, исходя из минимального количества точек крепления якорь-цепей для равномерного подъема объекта, якорь-цепей и трех углов самого объекта осуществляют одновременно.
Значительное - в несколько десятков раз, увеличение производительности поиска достигается за счет того, что:
- для поиска нужного РГАБ под водой осуществляют ненаправленное излучение с судна гидроакустического кодированного сигнала управления на расстояние не менее 15 км (расстояние прямой радиолокационной видимости в море), при этом за 3 минуты: 1 минута - трехкратное излучение гидроакустического кодированного сигнала управления и 2 мин - время всплытия РГАБ на поверхность моря с глубины ~1000 м (максимальные глубины в районах континентального шельфа, в которых в настоящее время осуществляется добыча нефти), где под водой обследуется площадь ~2826 км2 (S=4πR2=4×3,14×152);
- для технического поиска нужного всплывшего на поверхность моря РГАБ используют навигационную радиолокационную станцию - по отражению радиосигналов от металлического корпуса РГАБ, а также радиопеленгатор - для обнаружения и определения направления на работающий радиопередатчик РГАБ и, при необходимости, космический аппарат, при этом за 5 минут - время технического осмотра поверхности моря с помощью судовой радиолокационной станции и радиопеленгатора, при дальности действия радиопередатчика РГАБ 15 км (расстояние прямой радиолокационной видимости в море), обследуется площадь ~2826 км2(S=4πR2=4×3,14×152);
- для улучшения визуального поиска нужного всплывшего на поверхность моря РГАБ его корпус выкрашен в яркий цвет и обклеен специальным светоотражающим покрытием. Кроме того, каждый прибор РГАБ снабжен проблесковым маяком и несколькими (не менее двух) сигнальными ракетами.
Существенное - в несколько раз, уменьшение времени подготовки объекта к подъему на судно достигается за счет того, что:
- в течение всего нескольких минут, благодаря положительной плавучести радиогидроакустических буев, осуществляется подъем на поверхность моря крепких фалов (веревок) - своеобразных проводников для соответствующих тросов, якорей и якорь-цепей объекта;
- после подъема соответствующего РГАБ и его крепкого фала на борт судна в течение нескольких минут судовой выборочной машиной осуществляется подъем соответствующего троса на судно;
- после подъема троса на борт судна в течение нескольких минут судовым краном осуществляется подъем соответствующего якоря;
- после подъема на борт судна всех якорей объект готов к подъему на поверхность моря с помощью нескольких - не менее трех якорь-цепей.
Другими словами, процессы поиска, идентификации и подготовки объекта к подъему на поверхность моря совмещены во времени, т.е. выполняются практически одновременно.
Расширение области применения достигается за счет того, что:
- имеется возможность реализации способа в неблагоприятных погодно-климатических условиях: ветер, туман и др.;
- имеется возможность реализации способа в неблагоприятных гидрофизических условиях: развитое волнение моря, сильные подводные течения и др.;
- имеется возможность выборочного (например, сначала дальнего от судна РГАБ и т.д.) всплытия на поверхность моря того или иного РГАБ и др.
Уменьшение финансовых затрат достигается за счет исключения использования водолазов и НПА для поиска и идентификации объекта, а также для подготовки его к подъему на поверхность моря и др.
Отличительными признаками заявляемого способа являются:
1. С судна последовательно формируют, усиливают и ненаправленно излучают гидроакустические кодированные сигналы управления.
2. Под водой в соответствующих РГАБ последовательно принимают, усиливают и дешифруют гидроакустические кодированные сигналы управления.
3. С помощью механических замков последовательно отсоединяют соответствующие РГАБ от соответствующих дополнительных якорей.
4. Обеспечивают, благодаря положительной плавучести РГАБ и наличию необходимых запасов крепкого фала последовательное всплытие на поверхность моря соответствующих РГАБ.
5. На судне последовательно осуществляют подъем на борт соответствующих РГАБ и соответствующих запасов крепкого фала с соответствующими дополнительными грузами.
6. На судне последовательно осуществляют подъем на борт соответствующих дополнительных грузов, тросов и якорей.
7. На судне одновременно, с помощью соответствующих якорь-цепей, осуществляют подъем на поверхность моря самого объекта.
Наличие отличительных признаков позволяет сделать вывод о соответствии заявляемого способа критерию "новизна".
Анализ известных технических решений с целью обнаружения в них указанных отличительных признаков показал следующее.
Признаки 1-3 и 4 являются новыми, и неизвестно их использование для поиска и подъема на борт судна объекта, установленного ранее на морском дне. В то же время данные признаки являются известными в гидроакустике.
Признаки 5 и 6 являются новыми, и неизвестно их использование для подъема на поверхность моря объекта, установленного ранее на морском дне.
Признак 7 является хорошо известным.
Таким образом, наличие новых существенных признаков в совокупности с известными обеспечивает появление у заявляемого решения нового свойства, не совпадающего со свойствами известных технических решений - быстро обнаруживать на большой площади, оперативно (в короткие сроки) подготавливать к подъему, в том числе в неблагоприятных погодно-климатических: ветер, туман и др., и гидрофизических: развитое волнение моря, сильные подводные течения и др., условиях, и поднимать на поверхность моря объекты, установленные ранее на морском дне, при минимальных финансово-временных затратах.
В данном случае мы имеем новую совокупность признаков и их новую взаимосвязь, причем не простое объединение новых признаков и уже известных, а именно выполнение операций в предложенной последовательности и приводит к качественно новому эффекту.
Данное обстоятельство позволяет сделать вывод о соответствии разработанного способа критерию "существенные отличия".
На фиг.1 и фиг.2 представлены функциональные схемы устройства, реализующего разработанный способ. На фиг.3 представлена структурная схема РГАБ. На фиг.4 иллюстрируется внешний вид некоторых приборов, используемых для реализации разработанного способа.
Устройство содержит: судно (1) и объект (2), установленный ранее на морском дне. На судне (1) находятся: блок формирования (3), усиления (4) и излучения (5) гидроакустических кодированных сигналов управления, в простейшем случае, на частотах F1, F2 и F3; навигационная радиолокационная станция (6), радиопеленгатор (7) радиосигналов, в простейшем случае, на частотах ω1, ω2 и ω3 от соответствующих РГАБ, первое подъемное устройство (8) в виде судовой лебедки, а также второе подъемное устройство (9) в виде судового крана.
К объекту (2), в простейшем случае с трех сторон, последовательно присоединены идентичные друг другу якорь-цепи (10), идентичные друг другу якоря (11), идентичные друг другу тросы (12), изготовленные из металла, идентичные друг другу основные грузы (13), идентичные друг другу крепкие фалы (14), изготовленные из растительных нитей, идентичные друг другу дополнительные грузы (16) и соответствующие РГАБ: первый РГАБ (16), второй РГАБ (17), третий РГАБ (18). При этом каждый из РГАБ (16, 17 и 18) находится в идентичных друг другу металлических корпусах (19) круглой формы, выкрашенных в яркий цвет и покрытых снаружи светоотражающим покрытием - для облегчения визуального обнаружения в светлое и темное время суток соответственно.
С наружной стороны корпуса каждого из РГАБ находятся идентичные друг другу механический замок (20) с металлическим соединительным кольцом (21), радиолокационная антенна (22), прикрепленная в подводном положении к корпусу РГАБ при помощи соответствующего фиксатора (23), датчик глубины (24), сигнальные ракеты (25), проблесковый маяк (26) и гидрофон (27). Внутри корпуса каждого РГАБ находятся идентичные друг другу полосовые фильтры (28) и усилители (29), соответствующие своим РГАБ дешифраторы: (30А) - для первого РГАБ, (16В) - для второго РГАБ (17) и (16С) - для третьего РГАБ (18); идентичные друг другу электромагниты (31), радиопередатчики (32) и высокоемкостные блоки питания (33).
Способ реализуется следующим образом (фиг.1 - фиг.3).
На дне моря находится объект (например, технологическая площадка для обслуживания морской нефтяной платформы), установленный там ранее. К объекту (2), в простейшем случае с трех сторон, последовательно присоединены идентичные друг другу якорь-цепи (10), якоря (11), тросы (12), основные грузы (13), крепкие фалы (14), дополнительные грузы (16) и соответствующие РГАБ: первый РГАБ (16), второй РГАБ (17), третий РГАБ (18).
Судно (1) подходит в расчетную точку нахождения на дне моря объекта (2) и стопорит ход (ложится в дрейф), а с его борта на глубину 50-100 м с помощью соответствующего кабель-троса опускают блок (5). В зависимости от погодно-климатических (например, сила и направление ветра) и гидрофизических (например, направление и скорость подводного течения) условий осуществляют вызов по гидроакустическому каналу управления того или иного РГАБ. Например, для первого РГАБ (16) в блоках формирования (3) и усиления (4) осуществляют формирование и усиление до необходимого уровня гидроакустического кодированного сигнала управления на частоте F1, который затем с помощью блока (5) ненаправленно, в том числе и в сторону первого РГАБ (16), излучают в радиусе не менее 15 км от судна (1).
В первом РГАБ (16) с помощью гидрофона (27) - датчика акустического (избыточного) давления принимают гидроакустический кодированный сигнал управления на частоте F1. Для уменьшения влияния низкочастотных (НЧ) и высокочастотных (ВЧ) помех вне рабочего диапазона частот (ниже и выше частоты F1) данный сигнал поступает на полосовой фильтр (28). Далее сигнал на частоте F1 поступает на вход усилителя, в котором усиливается до необходимого уровня. С выхода усилителя данный сигнал поступает на вход первого (обозначенного на фиг.3 индексом «А») дешифратора (30А), где его сравнивают с эталонным сигналом на частоте F1, зашитом при изготовлении. В случае соответствия кода с выхода шифратора (30А) на электромагнит (31) подают соответствующий сигнал управления, и электромагнит (31) открывает механический замок (20), находящийся ранее под водой в закрытом состоянии. После срабатывания (открытия) механического замка (20) из него выпадает, благодаря положительной плавучести РГАБ (16), металлическое соединительное кольцо (21). Благодаря собственной положительной плавучести и наличию запаса крепкого фала (14) РГАБ (16) начинает всплывать на поверхность моря. При этом благодаря круглой форме корпуса (19), смещенному центру тяжести - из-за соответствующего расположения радиопередатчика (32) и высокоемкостного блока питания (33) внутри корпуса (19) и способу крепления крепкого фала (14) к корпусу (19) РГАБ (16) в воде сразу же переворачивается (поворачивается на 180 градусов).
После всплытия на поверхность моря срабатывает, благодаря уменьшению внешнего давления воды, датчик глубины (24), который передает соответствующую команду на фиксатор (23), проблесковый маяк (26) и сигнальные ракеты (25). В результате фиксатор (23) открывается и радиолокационная антенна (22), прикрепленная в подводном положении к корпусу РГАБ при помощи соответствующего фиксатора (23), распрямляется. При этом начинает работать радиопередатчик (32), излучая во все стороны, в том числе в сторону судна (1), соответствующий сигнал на частоте ω1. Одновременно с этим начинают работать (мигать) проблесковый маяк (26) и отстреливаться (уходить в небо) сигнальные ракеты (25).
На судне визуально: по яркому корпусу (19), работающему проблесковому маяку (26) и отстреливающимся сигнальным ракетам (25), и технически: с помощью навигационной радиолокационной станции (6) - по отражению ее электромагнитных зондирующих сигналов от металлического корпуса (19), и радиопеленгатора (7) - по излучаемым радиолокационной антенной (22) РГАБ (16) радиосигналам на частоте ω1, обнаруживают на поверхности моря всплывший РГАБ (16), а также определяют направление на него (пеленгуют) и расстояние до него.
Затем судно (1) подходит к всплывшему на поверхность моря РГАБ (16) и морской кошкой, или багром, поднимают на борт данный РГАБ. В дальнейшем, с помощью первого подъемного устройства (8) в виде судовой лебедки, последовательно поднимают на борт судна: первый крепкий фал (14) с первым дополнительным грузом (15), первый основной груз (13), первый трос (12) и первый якорь (11).
Аналогичным образом осуществляют поиск и подъем второго РГАБ (17) и третьего РГАБ (18). Аналогичным же образом осуществляют подъем второго и третьего крепких фалов (14) со вторым и третьим дополнительными грузами (15), второго и третьего основных грузов (13), второго и третьего тросов (12), а также второго и третьего якорей (11).
После этого задействуют второе подъемное устройство (9) в виде судового крана, и с его помощью на борт судна одновременно поднимают первую, вторую и третью якорь-цепи (10), прикрепленные ранее к первому, второму и третьему углам (сторонам), исходя из минимального количества точек крепления, объекта (2). Затем исключая переворачивание, благодаря трем точкам крепления, на поверхность моря равномерно поднимают сам объект (2), установленный ранее на морском дне.
В дальнейшем, в зависимости от характера выполняемых работ с объектом (2) все якорь-цепи (10), все якоря (11), все тросы (12) и все основные грузы (13) могут либо храниться на борту судна (1), либо с помощью РГАБ (16, 17 и 18) и соответствующих крепких фалов (14) с дополнительными грузами (15) ставиться на морское дно и скрытно там храниться. Использование в РГАБ (16, 17 и 18) высокоемкостных блоков питания (33) позволяет обеспечивать их работоспособность в течение двух лет без подзарядки. Кроме того, при наличии форс-мажорных обстоятельств (погодные условия, предотвращение аварийной ситуации и др.), в процессе подъема на поверхность моря того или иного якоря, той или иной якорь-цепи или непосредственно самого объекта (2), возможно использовать эти же РГАБ, после взвода соответствующего механического замка (20) и фиксации соответствующего металлического соединительного кольца (21) в нем, для быстрой обратной их постановки на морское дно.
Значительное - в несколько десятков раз, увеличение производительности поиска достигнуто за счет того, что:
- для поиска на морском дне нужного, исходя из методики подъема на поверхность моря объекта (2) в конкретных условиях, якоря (при реализации разработанного способа сначала нужного РГАБ) в течение трех минут обследовали площадь ~2826 км2 (S=4πR2=4×3,14×152), что на несколько порядков выше, чем при использовании водолаза или НПА;
- для технического поиска всплывшего на поверхность моря нужного РГАБ использовали навигационную радиолокационную станцию и радиопеленгатор; при этом за 5 минут обследовали площадь ~2826 км2;
- для визуального поиска всплывшего на поверхность моря нужного РГАБ его корпус был предварительно выкрашен в яркий цвет и обклеен специальным светоотражающим покрытием. Кроме того, каждый прибор РГАБ был снабжен проблесковым маяком и несколькими сигнальными ракетами и др.
Существенное - в несколько раз, уменьшение времени подготовки объекта к подъему достигнуто за счет того, что этапы обнаружения и подготовки к подъему практически полностью совмещены по времени. При этом в течение десятков минут осуществляется подъем на борт судна моря крепких фалов с дополнительными грузами, основных грузов, тросов и якорей. После подъема на борт судна всех якорей объект готов к подъему на поверхность моря с помощью нескольких, не менее трех, якорь-цепей и др.
Расширение области применения было достигнуто за счет того, что:
- разработанный способ применяли в неблагоприятных погодно-климатических и гидрофизических условиях;
- выборочно осуществляли вызов по гидроакустическому каналу управления того или иного РГАБ (или нескольких РГАБ сразу), а в дальнейшем в нужной последовательности осуществляли подъем самого объекта;
- в процессе подъема объекта всегда имели возможность оперативного прекращения подъема и обратного возвращения его на дно моря - в исходное положение и др.
Уменьшение финансовых затрат достигнуто за счет не использования водолазов (их страховки другими водолазами, последующей медицинской реабилитации и др.) и НПА для поиска и идентификации объекта, а также для подготовки его к подъему на поверхность моря.
Морские испытания способа проводились в 2008 году на морском шельфе Республики Вьетнам при волнении моря до 5…6 баллов и подводном течении до 7-8 узлов. При этом были получены следующие основные результаты:
- дальность действия находилась в пределах до 20 км, что на несколько порядков больше, чем при использовании водолазов или НПА;
- время визуального и технического обнаружения всплывшего на поверхность моря РГАБ, а также определения его пространственных координат в среднем составляло 7-8 минут;
- время подготовки объекта к подъему при использовании 8 якорей в среднем составляло 16 часов, что в несколько раз меньше, чем при использовании водолазов или НПА.
На фиг.5 иллюстрируется фактическая схема поиска и подъема на поверхность моря объекта, установленного ранее на морском дне на восемь якорей (с использованием 8 РГАБ).
Литература
1. Булатов А.И., Проселков Ю.М. Морские нефтегазовые сооружения. Техника и технологии разработки и эксплуатации морских нефтегазовых месторождений. - Краснодар: Просвещение-Юг, 2006, 412 с.
2. Мовсумзаде Э.М., Мастобаев Б.Н., Мастобаев Ю.Б. и др. Морская нефть. Развитие технических средств и технологий. - Уфа: Монография, 2005, 236 с.
3. Методика подготовки и подъема на поверхность моря технологических площадок нефтяных платформ. - Вьетнам, Ханой: институт нефти и газа, 2000, 371 с.
4. Коробов А.А., Левин B.C., Лукочиков А.В. и др. Подводная технология. - Л.: Судостроение, 1980, 232 с.
5. Автономные необитаемые подводные аппараты. / Под общей редакцией акад. М.Д.Агеева. - Владивосток: Наука, 2000, 272 с.
Задача, которая решается изобретением, заключается в быстром обнаружении на большой площади, оперативной подготовке к подъему, в том числе в неблагоприятных погодно-климатических: ветер, туман и др., и гидрофизических: развитое волнение моря, сильные подводные течения и др., условиях, и подъему на поверхность моря объекта, установленного ранее на морском дне, при минимальных финансово-временных затратах. Способ реализуется следующим образом. На дне моря находится объект, установленный там ранее, к которому в простейшем случае с трех сторон последовательно присоединены идентичные друг другу якорь-цепи, якоря, тросы, основные грузы, крепкие фалы, дополнительные грузы и соответствующие радиогидроакустические буи (РГАБ). При подходе судна в расчетную точку осуществляют излучение гидроакустического кодированного сигнала. В первом РГАБ принимают гидроакустический кодированный сигнал управления, после чего РГАБ всплывает на поверхность моря. После технического или визуального обнаружения на поверхности моря РГАБ судно подходит в данную точку и производит подъем объекта. 5 ил.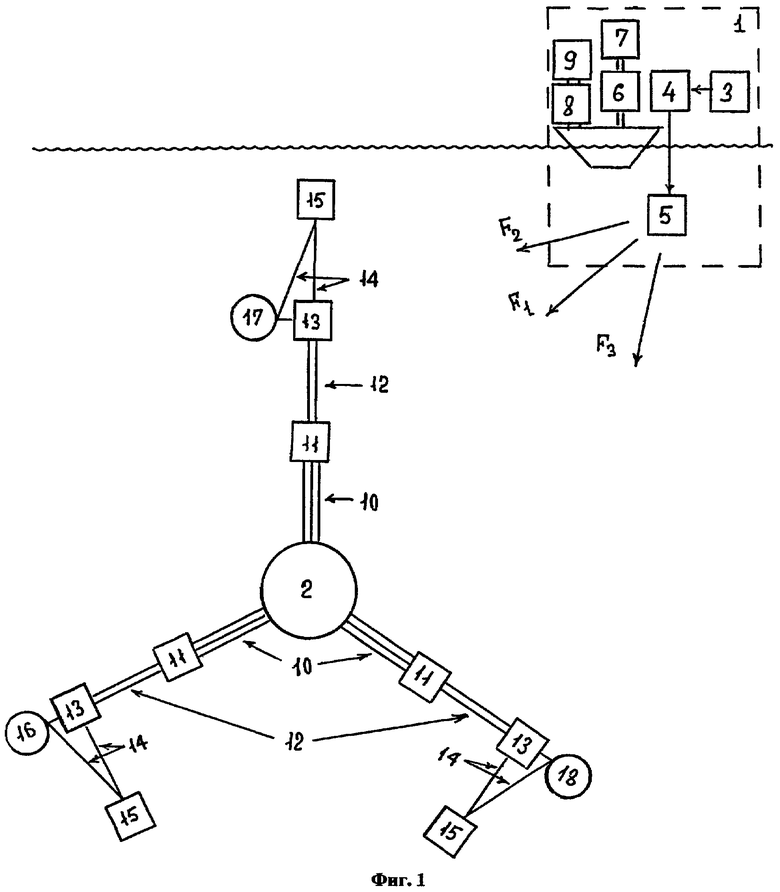
Способ поиска и подъема на поверхность моря объекта, установленного ранее на морском дне, заключающийся в формировании, усилении и ненаправленном излучении с судна первого гидроакустического кодированного сигнала управления на частоте F1, приеме, усилении и дешифрации первого гидроакустического кодированного сигнала управления на частоте F1 в первом радиогидроакустическом буе, обладающем собственной положительной плавучестью, механическом отсоединении первого радиогидроакустического буя от первого основного груза, всплытии первого радиогидроакустического буя на поверхность моря, при этом первый необходимый запас крепкого фала, предварительно уложенный петлей на морском дне и соединенный своей центральной частью с первым дополнительным грузом, закреплен одной стороной с последовательно механически соединенными первым основным грузом, первым тросом, первым якорем, первой якорь-цепью и первым углом объекта, а другой стороной - с корпусом первого радиогидроакустического буя на судне визуально, а также с помощью навигационной радиолокационной станции и радиопеленгатора осуществляют поиск на поверхности моря всплывшего первого радиогидроакустического буя, а также осуществляют техническое измерение расстояния между всплывшим первым радиогидроакустическим буем и судном, после подъема первого радиогидроакустического буя и первого крепкого фала с первым дополнительным грузом на борт судна последовательно поднимают первый основной груз, первый трос, первый якорь, первую якорь-цепь и первый угол (или первую сторону) самого объекта, установленного ранее на морском дне, в формировании, усилении и ненаправленном излучении с судна второго гидроакустического кодированного сигнала управления на частоте F2, приеме, усилении и дешифрации второго гидроакустического кодированного сигнала управления на частоте F2 во втором радиогидроакустическом буе, обладающем собственной положительной плавучестью, механическом отсоединении второго радиогидроакустического буя от второго основного груза, всплытии второго радиогидроакустического буя на поверхность моря, при этом второй необходимый запас крепкого фала, предварительно уложенный петлей на морском дне и соединенный своей центральной частью со вторым дополнительным грузом, закреплен одной стороной с последовательно механически соединенными вторым основным грузом, вторым тросом, вторым якорем, второй якорь-цепью и вторым углом объекта, а другой стороной - с корпусом второго радиогидроакустического буя на судне визуально, а также с помощью навигационной радиолокационной станции и радиопеленгатора осуществляют поиск на поверхности моря всплывшего второго радиогидроакустического буя, а также осуществляют техническое измерение расстояния между всплывшим вторым радиогидроакустическим буем и судном, после подъема второго радиогидроакустического буя и второго крепкого фала со вторым дополнительным грузом на борт судна последовательно поднимают второй основной груз, второй трос, второй якорь, вторую якорь-цепь и второй угол самого объекта, установленного ранее на морском дне, в формировании, усилении и ненаправленном излучении с судна третьего гидроакустического кодированного сигнала управления на частоте F3, приеме, усилении и дешифрации третьего гидроакустического кодированного сигнала управления на частоте F3 в третьем радиогидроакустическом буе, обладающем собственной положительной плавучестью, механическом отсоединении третьего радиогидроакустического буя от третьего основного груза, всплытии третьего радиогидроакустического буя на поверхность моря, при этом третий необходимый запас крепкого фала, предварительно уложенный петлей на морском дне и соединенный своей центральной частью с третьим дополнительным грузом, закреплен одной стороной с последовательно механически соединенными третьим основным грузом, третьим тросом, третьим якорем, третьей якорь-цепью и третьим углом объекта, а другой стороной - с корпусом третьего радиогидроакустического буя на судне визуально, а также с помощью навигационной радиолокационной станции и радиопеленгатора осуществляют поиск на поверхности моря всплывшего третьего радиогидроакустического буя, а также осуществляют техническое измерение расстояния между всплывшим третьим радиогидроакустическим буем и судном, после подъема третьего радиогидроакустического буя и третьего крепкого фала с третьим дополнительным грузом на борт судна последовательно поднимают третий основной груз, третий трос, третий якорь, третью якорь-цепь и третий угол самого объекта, установленного ранее на морском дне, при этом подъем на борт судна всех трех, исходя из минимального количества точек крепления якорь-цепей для равномерного подъема объекта, якорь-цепей и трех углов самого объекта осуществляют одновременно.
| СПОСОБ ПОИСКА И ПОДЪЕМА НА ПОВЕРХНОСТЬ МОРЯ ЗАТОНУВШЕГО МОРСКОГО ОБЪЕКТА | 2001 |
|
RU2221256C2 |
| ГИДРОАКУСТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОТСОЕДИНЕНИЯ ПОДВОДНОГО ИЗДЕЛИЯ И ОБОЗНАЧЕНИЯ ЕГО МЕСТОПОЛОЖЕНИЯ | 1997 |
|
RU2128350C1 |
| СПОСОБ ЗАВЕДЕНИЯ ПОДЪЕМНЫХ КАНАТОВ И УСТРОЙСТВО ДЛЯ ПОДЪЕМА ПОДВОДНОГО ОБЪЕКТА | 1990 |
|
RU2009067C1 |
| WO 03093627 A1, 22.08.1990 | |||
| US 5184328 A, 02.02.1993 | |||
| US 4278362 A, 14.07.1981. | |||

