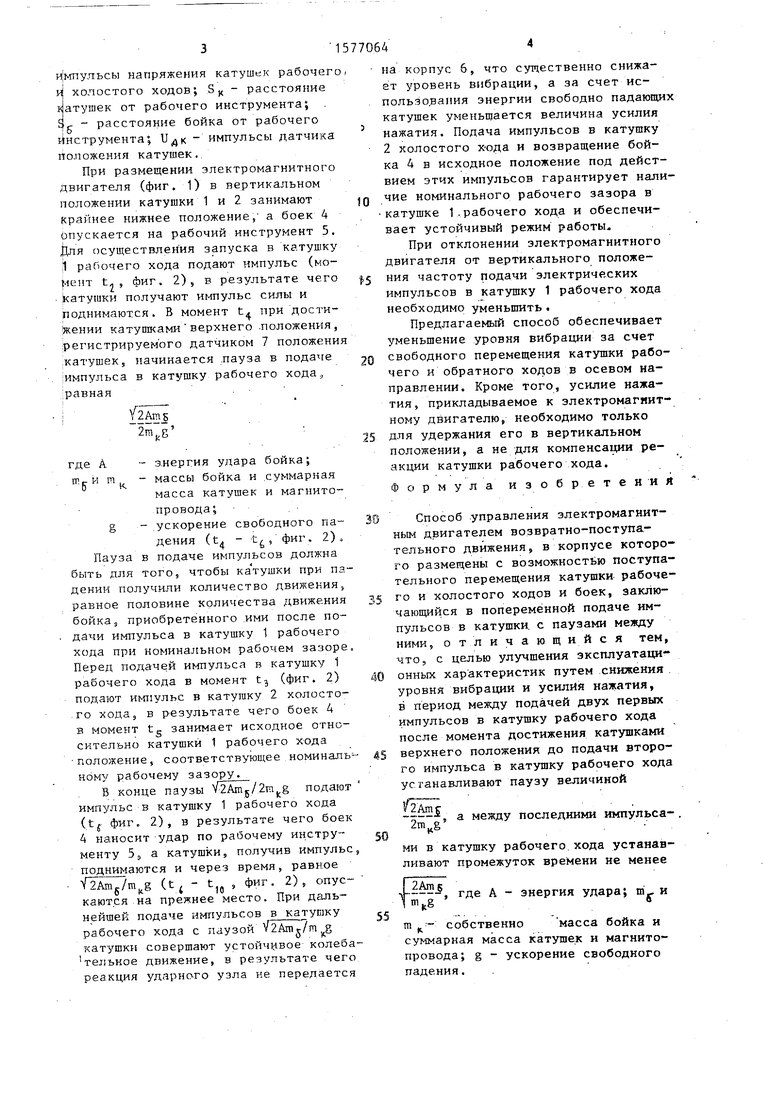
импупьсы напряжения катушек рабочег и хопостого ходов; SK - расстояние катушек от рабочего инструмента; Sr расстояние бойка от рабочего инструмента; ил« - импульсы датчика положения катушек.
При размещении электромагнитного двигателя (фиг. 1) в вертикальном положении катушки 1 и 2 занимают крайнее нижнее положение, а боек 4 опускается на рабочий инструмент 5. Для осуществления запуска в катушку 1 рабочего хода подают импульс (момент t., фиг. 2), в результате чего катушки получают импульс силы и поднимаются. В момент t,, при достижении катушками верхнего положения, регистрируемого датчиком 7 положени катушек, начинается пауза в подаче импульса в катушку рабочего хода, равная
2m;g
где А
Y пк
-энергия удара бойка;
-массы бойка и суммарная масса катушек и магнито- провода;
g - ускорение свободного падения (t, - t, фиг. 2).
Пауза в подаче импульсов должна быть для того, чтобы катушки при падении получили количество движения, равное половине количества движения бойка, приобретенного ими после подачи импульса в катушку 1 рабочего хода при номинальном рабочем зазоре Перед подачей импульса в катушку 1 рабочего хода в момент tj (фиг. 2) подают импульс в катушку 2 холостого хода, в результате чего боек 4 в момент ts занимает исходное относительно катушки 1 рабочего хода положение, соответствующее номинальному рабочему зазору.
В конце паузы V2Am5/2m g подают импульс в катушку 1 рабочего хода (tj фиг. 2), в результате чего боек 4 наносит удар по рабочему инструменту 59 а катушки, получив импульс поднимаются и через время, равное (t - t10 , фиг. 2), опускаются на прежнее место. При дальнейшей подаче импульсов в ка тушку рабочего хода с паузой VZAmr/m g катушки совершают устойчивое колеба тельное движение, в резупьтате чего реакция ударного узла не передается
на корпус 6, что существенно снижает уровень вибрации, а за счет использования энергии свободно падающих катушек уменьшается величина усилия
нажатия. Подача импульсов в катушку 2 холостого хода и возвращение бойка 4 в исходное положение под действием этих импульсов гарантирует наличие номинального рабочего зазора в катушке 1 рабочего хода и обеспечивает устойчивый режим работы.
При отклонении электромагнитного двигателя от вертикального положе5 ния частоту подачи электрических импульсов в катушку 1 рабочего хода необходимо уменьшить .
Предлагаемый способ обеспечивает уменьшение уровня вибрации за счет
о свободного перемещения катушки рабочего и обратного ходов в осевом направлении. Кроме того, усилие нажатия, прикладываемое к электромагнитному двигателю, необходимо только
5 дня удержания его в вертикальном положении, а не для компенсации реакции катушки рабочего хода.
Формула изобретения
D Способ управления электромагнитным двигателем возвратно-поступательного движения, в корпусе которого размещены с возможностью поступательного перемещения катушки рабоче5 го и холостого ходов и боек, заключающийся в попеременной подаче импульсов в катушки с паузами между ними, отличающийся тем, что, с целью улучшения эксплуатаци0 онных характеристик путем снижения уровня вибрации и усилия нажатия, в период между подачей двух первых импульсов в катушку рабочего хода после момента достижения катушками
5 верхнего положения до подачи второго импульса в катушку рабочего хода устанавливают паузу величиной
, а между последними импульса-. 2m Kg
ми в катушку рабочего хода устанавливают промежуток времени не менее
-, где А - энергия удара; mf и
1 kgО
in K - собственно
масса бойка и суммарная масса катушек и магнито- провода; g - ускорение свободного падения.
дат
ч
U А
V
Фиг.1 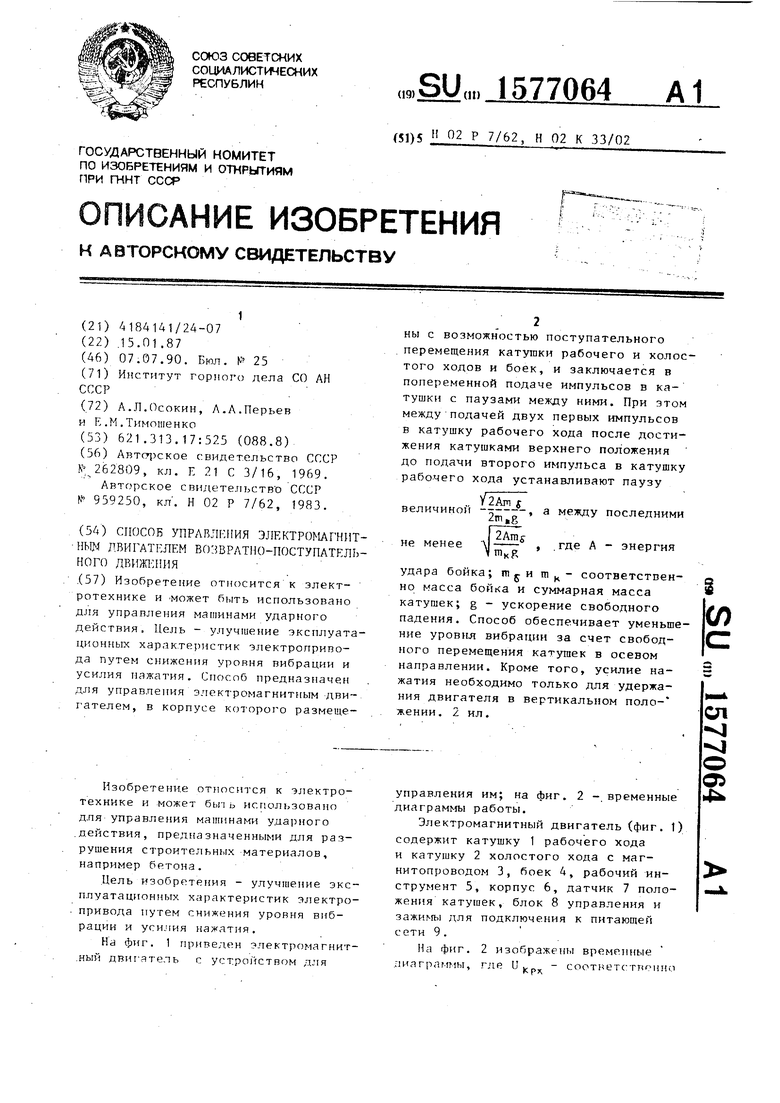
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления электромагнитным двигателем возвратно-поступательного движения | 1972 |
|
SU959250A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХКАТУШЕЧНЫМ ЭЛЕКТРОМАГНИТНЫМ ДВИГАТЕЛЕМ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 2012 |
|
RU2486656C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХКАТУШЕЧНЫМ ЭЛЕКТРОМАГНИТНЫМ ДВИГАТЕЛЕМ УДАРНОГО ДЕЙСТВИЯ | 2011 |
|
RU2472243C1 |
| Электромагнитный молоток | 1977 |
|
SU905049A1 |
| Способ управления двухкатушечным электромагнитным двигателем | 1986 |
|
SU1525856A1 |
| Электропривод ударного действия | 1987 |
|
SU1640809A1 |
| Электромагнитная машина ударного действия | 1985 |
|
SU1404322A1 |
| Электромагнитная машина ударного действия | 1987 |
|
SU1511379A1 |
| ЭЛЕКТРОМАГНИТНАЯ МАШИНА УДАРНОГО ДЕЙСТВИЯ | 1996 |
|
RU2111847C1 |
| Электродвигатель возвратно-поступательного движения | 1989 |
|
SU1721740A1 |

Изобретение относится к электротехнике и может быть использовано для управления машинами ударного действия. Цель - улучшение эксплуатационных характеристик электропривода путем снижения уровня вибрации и усилия нажатия. Способ предназначен для управления электромагнитным двигателем, в корпусе которого размещены с возможностью поступательного перемещения катушки рабочего и холостого ходов и боек, и заключается в попеременной подаче импульсов в катушки с паузами между ними. При этом между подачей двух первых импульсов в катушку рабочего хода после достижения катушками верхнего положения до подачи второго импульса в катушку рабочего хода устанавливают паузу величиной √2AM б/2M кG, а между последними не менее √2AM б/M кG, где A - энергия удара бойка, M б и M к - соответственно масса бойка и суммарная масса катушек, G - ускорение свободного падения. Способ обеспечивает уменьшение уровня вибрации за счет свободного перемещения катушек в осевом направлении. Кроме того, усилие нажатия необходимо только для удержания двигателя в вертикальном положении. 2 ил.
t
X
4е
| 0 |
|
SU262809A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ управления электромагнитным двигателем возвратно-поступательного движения | 1972 |
|
SU959250A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
