Изобретения относятся к области управления движущимися аппаратами и могут быть использованы преимущественно в управляемых торпедах, снарядах и ракетах, обеспечивая их управляемость и устойчивость на траектории в широком диапазоне скоростей движения, а также в подводных и летательных аппаратах гражданского и военного назначения.
В настоящее время в качестве рулевых устройств управляемых аппаратов применяются аэродинамические (гидродинамические) поворотные рули различной формы в плане (1), обеспечивающие управляемость и устойчивое движение аппаратов как при низких дозвуковых, так и при высоких сверхзвуковых скоростях движения. Способ управления движущимся аппаратом посредством поворотного руля основан на создании управляющей подъемной силы при обтекании руля потоком внешней среды.
Расширение области применения и повышение эффективности управляемых аппаратов предопределяет тенденцию к увеличению их грузоподъемности и совершенствованию системы управления, что обусловливает увеличение массы и габаритов аппаратов и, как следствие этого, необходимость увеличения потребных управляющих усилий, создаваемых рулями.
Задача увеличения управляющих усилий решается за счет увеличения площади рулей, что приводит к возрастанию действующего на них шарнирного аэродинамического (или гидродинамического) момента и, соответственно, к возрастанию нагрузки на рулевой привод, увеличение мощности которого обусловливает увеличение его габаритов и, следовательно, ухудшение габаритно-массовых характеристик аппарата.
Наиболее близкий к заявляемому по совокупности существенных признаков и достигаемому эффекту реализованный в подводном аппарате (2) способ управления, основанный на создании подъемной управляющей силы при обтекании потоком внешней среды поворотного руля, выполненного в виде комбинации несущих поверхностей.
Конструкция подводного аппарата (2) также наиболее близка к заявляемым устройствам по совокупности существенных признаков и достигаемому эффекту. Данный подводный аппарат содержит установленный на корпусе поворотный руль, выполненный в виде комбинации жестко связанных пересекающихся несущих поверхностей, образующих гидродинамическую решетку.
По сравнению с равновеликим по площади в плане поворотным рулем (1) гидродинамическая решетка обеспечивает большие управляющие усилия.
Однако повышение управляющих усилий в этом подводном аппарате также связано с увеличением площади (хорды и/или размаха) руля (т.е. его несущих поверхностей), что приводит к возрастанию гидродинамического шарнирного момента, нагружающего рулевой привод. Это, как и в случае поворотного руля (1), образованного одной несущей поверхностью, влечет за собой увеличение мощности, а следовательно, и габаритов рулевого привода.
Задача заявляемых изобретений - снижение потребной на управление движущимся аппаратом мощности за счет уменьшения аэродинамической (гидродинамической) нагрузки на рулевой привод.
Это достигается тем, что в заявляемом способе управления движущимся аппаратом, основанном на создании подъемной управляющей силы за счет обтекания потоком внешней среды поворотного руля, выполненного в виде комбинации несущих поверхностей, поворотом впереди стоящей несущей поверхности изменяют направление потока внешней среды перед последующей несущей поверхностью руля.
В первом варианте заявляемого управляемого аппарата, содержащего корпус, рулевой привод и руль в виде комбинации несущих поверхностей, кинематически связанных с выходным валом рулевого привода, решение поставленной задачи достигается тем, что несущие поверхности руля расположены последовательно в направлении продольной оси корпуса и установлены на осях, имеющих жестко связанные с ними рычаги, которые шарнирно соединены между собой тягами, а общей тягой - с выходным валом рулевого привода.
Во втором варианте заявляемого управляемого аппарата, содержащего корпус и поворотный руль в виде комбинации несущих поверхностей, решение поставленной задачи достигается тем, что несущие поверхности руля расположены последовательно в направлении продольной оси корпуса и жестко связаны по концевым хордам перемычкой, а по бортовым хордам - цапфой оси, расположенной между передней точкой бортовой хорды первой несущей поверхности и задней точкой бортовой хорды последней.
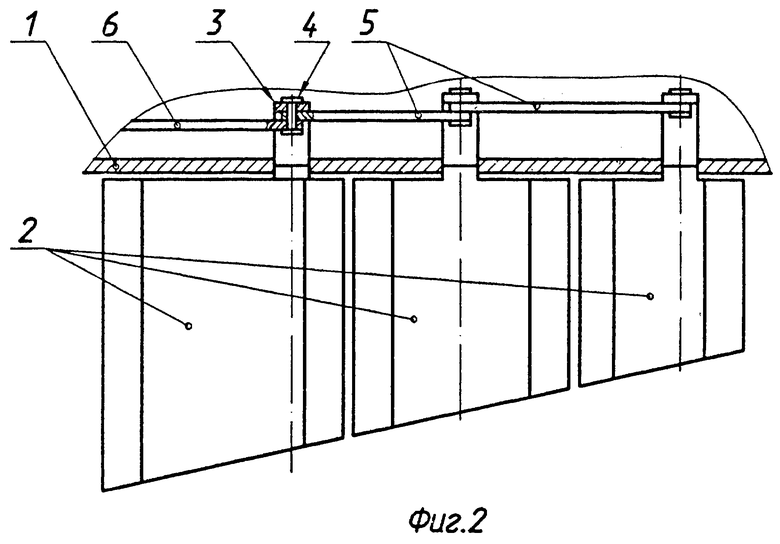
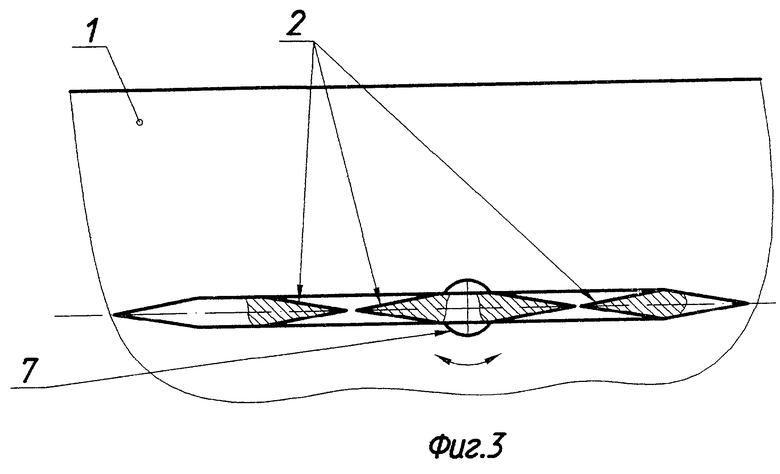
На фиг.1 и 2 представлена конструкция первого варианта управляемого аппарата, где на фиг.1 изображен вид на управляемый аппарат со стороны концевой хорды руля, а на фиг.2 - вид на руль в плане.
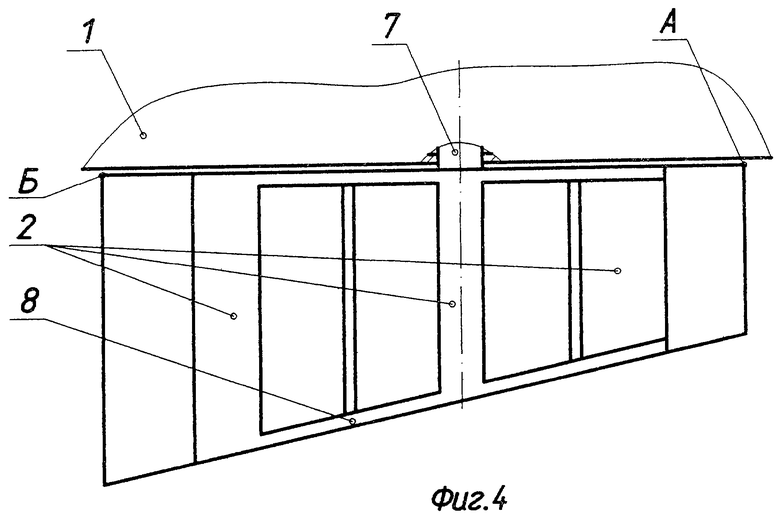
На фиг.3 и 4 представлена конструкция второго варианта управляемого аппарата с видами, аналогичными изображенным соответственно на фиг.1 и 2.
В первом варианте управляемого аппарата (фиг.1 и 2) на корпусе 1 установлен руль, состоящий из поворотных несущих поверхностей 2, расположенных по продольной оси управляемого аппарата и установленных в корпусе 1 на осях, имеющих жестко связанные с ними рычаги 3. Посредством осей 4 и тяг 5 рычаги шарнирно связаны между собой, а тягой 6 - с выходным валом рулевого привода.
Во втором варианте управляемого аппарата (фиг.3 и 4) на корпусе 1 установлен руль, состоящий из поворотных несущих поверхностей 2, расположенных вдоль продольной оси управляемого аппарата и жестко связанных по бортовым хордам цапфой оси 7, а по концевым хордам - перемычкой 8. При этом ось 7 расположена между передней точкой бортовой хорды первой несущей поверхности (точкой А на фиг. 4) и задней точкой бортовой хорды последней несущей поверхности (точкой Б на фиг.4).
Результирующая сила, возникающая при обтекании руля потоком газа или жидкости, приложена в условной точке, называемой центром давления потока газа (жидкости) на руль. В общем случае положение центра давления руля, обтекаемого газом (или сжимаемой жидкостью), зависит от скорости движения и угла атаки управляемого аппарата, от угла поворота и формы руля в плане.
Действие нагружающего рулевой привод управляемого аппарата аэродинамического (гидродинамического) момента обусловлено несовпадением постоянной координаты оси вращения и переменной координаты центра давления, измеряемых вдоль хорды руля. При этом разница этих координат представляет плечо приложения результирующей аэродинамической (гидродинамической) силы относительно оси руля.
Например, для обтекаемых потоком воздуха прямоугольных в плане рулей положение центра давления в зависимости только от скорости потока изменяется на 25% величины хорды руля (3). Поэтому при постоянной результирующей силе снижению шарнирного момента способствует уменьшение хорды руля, т.е. использование в качестве рулей несущих поверхностей большого удлинения. Однако в этом случае при компоновке управляемого аппарата возникают проблемы размещения (складывания) и обеспечения прочности таких рулей.
Составляющее сущность заявляемого способа управления движущимся аппаратом последовательное обтекание несущих поверхностей руля потоком внешней среды, когда поворотом впереди стоящей несущей поверхности изменяют направление потока внешней среды перед последующей несущей поверхностью руля, обеспечивает возможность рассредоточения координат центров давления несущих поверхностей поворотного руля относительно оси выходного вала рулевого привода. Это позволяет составить руль из нескольких несущих поверхностей, имеющих большие удлинения и меньшие хорды, даже при условии обеспечения заданной площади руля в плане и ограничении его размаха. При этом меньшие хорды несущих поверхностей обусловливают сужение диапазона изменения координат центров давления, что обеспечивает уменьшение нагружающего рулевой привод аэродинамического (гидродинамического) шарнирного момента. Кроме того, появляется возможность взаимной компенсации шарнирных моментов, создаваемых разными несущими поверхностями руля.
В первом варианте управляемого аппарата это реализовано за счет выполнения руля в виде нескольких поворотных несущих поверхностей 2, которые относительно своих осей вращения создают аэродинамические (гидродинамические) моменты разного знака (противоположного направления). Суммирование всех моментов осуществляется кинематическим соединением рычагов 3 (посредством осей 4 и тяг 5), жестко связанных с осями несущих поверхностей 2. Передача суммарного момента аэродинамической (гидродинамической) нагрузки (полностью или частично скомпенсированной) осуществляется тягой 6, шарнирно соединенной с выходным валом рулевого привода.
Во втором варианте управляемого аппарата несколько несущих поверхностей 2 руля с целью их последовательного обтекания расположены друг за другом по продольной оси управляемого аппарата и жестко связаны по бортовым хордам цапфой оси 7, а по концевым хордам - перемычкой 8, обеспечивающими жесткость конструкции. Расположение общей оси вращения 7 между передней точкой А бортовой хорды первой несущей поверхности и задней точкой Б бортовой хорды последней несущей поверхности обеспечивает возможность создания ими шарнирных моментов разного знака относительно оси 7, а следовательно, и возможность полной или частичной компенсации нагрузки на рулевой привод.
В общем случае в качестве руля как в первом, так и во втором варианте управляемого аппарата возможно применение комбинаций монопланных несущих поверхностей с бипланными. При этом каждая несущая поверхность комбинации может иметь произвольные размеры и форму в плане, а общее количество несущих поверхностей, составляющих руль, не ограничено.
Таким образом, заявляемые способ управления и реализующие его два варианта управляемого аппарата обеспечивают решение поставленной задачи, а целесообразность применения одного из двух вариантов определяет условия эксплуатации и конструктивно-габаритные ограничения, предъявляемые к конкретной разработке.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Н. Ф.Краснов, В.Н.Кошевой. Управление и стабилизация в аэродинамике. М.: Высшая школа, 1978, с.76 (рис.1.9.1 а).
2. Подводный аппарат. Патент США 5551363, МПК 6 F 42 B 19/06.
3. Н.Я.Фабрикант. Аэродинамика. М.: Наука, 1964, с.217.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА, ПРЕОБРАЗУЕМОГО В ЛЕТАТЕЛЬНЫЙ АППАРАТ, И ТРАНСПОРТНОЕ СРЕДСТВО, ПРЕОБРАЗУЕМОЕ В ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1999 |
|
RU2169085C1 |
| ХВОСТОВОЙ ОТСЕК ВОЗДУШНО-ДИНАМИЧЕСКИХ РУЛЕВЫХ ПРИВОДОВ ДЛЯ УПРАВЛЯЕМЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (ПРЕИМУЩЕСТВЕННО ДЛЯ УПРАВЛЯЕМЫХ АВИАЦИОННЫХ БОМБ) И ПНЕВМОДВИГАТЕЛЬ РУЛЕВОГО ПРИВОДА | 2009 |
|
RU2418261C2 |
| АЭРОДИНАМИЧЕСКИЙ РУЛЬ УПРАВЛЯЕМОЙ РАКЕТЫ | 2005 |
|
RU2289779C1 |
| АЭРОДИНАМИЧЕСКИЙ ОРГАН УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2373110C1 |
| АЭРОДИНАМИЧЕСКИЙ РУЛЬ (ВАРИАНТЫ) | 2000 |
|
RU2184342C2 |
| Устройство аэродинамической системы управления возвращаемой многоразовой ступени ракеты-носителя | 2022 |
|
RU2800531C1 |
| СПОСОБ СОЗДАНИЯ ПОДЪЕМНОЙ СИЛЫ САМОЛЕТА (ВАРИАНТЫ), СПОСОБ ПОЛЕТА САМОЛЕТА, БЕЗАЭРОДРОМНЫЙ ВСЕПОГОДНЫЙ САМОЛЕТ "МАКСИНИО" ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ (ВАРИАНТЫ), СПОСОБ ВЗЛЕТА И СПОСОБ ПОСАДКИ, СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ В ПОЛЕТЕ, ФЮЗЕЛЯЖ, КРЫЛО (ВАРИАНТЫ), РЕВЕРС ТЯГИ И СПОСОБ ЕГО РАБОТЫ, СИСТЕМА ШАССИ, СИСТЕМА ГАЗОРАЗДЕЛЕНИЯ И ГАЗОРАСПРЕДЕЛЕНИЯ ЕГО | 2007 |
|
RU2349505C1 |
| ДВИЖИТЕЛЬ | 1998 |
|
RU2139217C1 |
| ГЛУБОКОВОДНЫЙ ОПУСКАЕМЫЙ АППАРАТ ПРЕДЕЛЬНЫХ ГЛУБИН | 2002 |
|
RU2203833C1 |
| АЭРОЛЕТ (ВАРИАНТЫ), ЧАСТИ АЭРОЛЕТА, СПОСОБЫ ИСПОЛЬЗОВАНИЯ АЭРОЛЕТА И ЕГО ЧАСТЕЙ | 2010 |
|
RU2466061C2 |
Изобретения относятся к управлению движущимися аппаратами и могут быть использованы преимущественно в управляемых торпедах, снарядах и ракетах, обеспечивая их управляемость и устойчивость на траектории в широком диапазоне скоростей движения, а также в подводных и летательных аппаратах гражданского назначения. Изобретение позволяет снизить потребную на управление движущегося аппарата мощность за счет уменьшения аэродинамической (гидродинамической) нагрузки на рулевой привод. Это достигается тем, что в способе управления движущимся аппаратом, основанном на создании подъемной управляющей силы за счет обтекания потоком внешней среды поворотного руля, выполненного в виде комбинации несущих поверхностей, поворотом впереди стоящей несущей поверхности изменяют направление потока внешней среды перед последующей несущей поверхностью руля. В первом варианте управляемого аппарата, содержащего корпус, рулевой привод и руль в виде комбинации несущих поверхностей, кинематически связанных с выходным валом рулевого привода, технический результат достигается за счет того, что несущие поверхности руля расположены последовательно в направлении продольной оси корпуса и установлены на осях, имеющих жестко связанные с ними рычаги, которые шарнирно соединены между собой тягами, а общей тягой - с выходным валом рулевого привода. Во втором варианте управляемого аппарата, содержащего корпус и поворотный руль в виде комбинации несущих поверхностей, технический результат достигается за счет того, что несущие поверхности руля расположены последовательно в направлении продольной оси корпуса и жестко связаны по концевым хордам перемычкой, а по бортовым хордам - цапфой оси, расположенной между передней точкой бортовой хорды первой несущей поверхности и задней точкой бортовой хорды последней. Целесообразность применения одного из двух вариантов управляемого аппарата, реализующих способ управления, определяют условия эксплуатации и конструктивно-габаритные ограничения, предъявляемые к конкретной разработке. 3 с.п. ф-лы, 4 ил.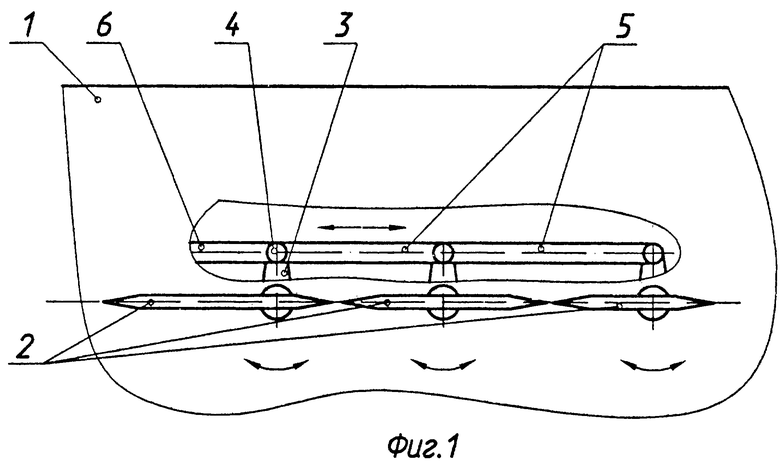
| US 5551363 А, 03.09.1996 | |||
| US 5549065 А, 27.08.1996 | |||
| РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОЙ АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ | 1994 |
|
RU2090446C1 |
| РУЛЬ УПРАВЛЕНИЯ С ОСЕВОЙ КОМПЕНСАЦИЕЙ | 1997 |
|
RU2116222C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 1998 |
|
RU2150082C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД | 1995 |
|
RU2088890C1 |
| УПРАВЛЯЕМЫЙ АРТИЛЛЕРИЙСКИЙ СНАРЯД | 2000 |
|
RU2177601C1 |
