Изобретение относится к области рулевых приводов управляемых аэродинамических поверхностей (аэродинамические рули, поворотный стабилизатор, поворотное крыло и т.д.) летательного аппарата (ЛА) и может быть использовано при создании новых и модернизации существующих ЛА.
Известен рулевой привод управляемой аэродинамической поверхности (УАП) (Бадягин А. А. и др. Проектирование самолетов, М. Машиностроение, 1972 г. стр. 460, 461, рис. 19, 32), который содержит рычаг управления (РУ), связанный с УАП механической проводкой.
Недостаток этого привода состоит в том, что он не обеспечивает отклонение УАП на необходимые углы при больших сверхзвуковых скоростях полета ЛА из-за больших усилий на РУ, возникающих вследствие большого шарнирного момента УАП на этих скоростях.
Известен также рулевой привод УАП (заявка Франции N 2600035, кл. B 64 C 9/10, 1987), который содержит РУ, дополнительную управляемую аэродинамическую поверхность (ДУАП), установленную на УАП в районе ее задней кромки с возможностью вращения вокруг оси, параллельной оси вращения УАП, и механическую проводку от РУ к ДУАП, причем выходной рычаг этой проводки шарнирно соединен с ДУАП и установлен в корпусе ЛА на некотором расстоянии от оси вращения УАП с возможностью вращения относительно корпуса ЛА. Недостатком этого привода является неустойчивость в его работе на малых дозвуковых скоростях полета ЛА.
Прототипом заявленного изобретения следует считать рулевой привод УАП (заявка Франции N 2600035, кл. B 64 C 9/10, 1987), который содержит РУ, ДУАП, установленную на УАП в районе ее задней кромки с возможностью вращения вокруг оси, параллельной оси вращения УАП, и механическую проводку от РУ к ДУАП.
Кроме того, в прототипе выходной рычаг механической проводки от РУ к ДУАП шарнирно соединен с ДУАП и установлен в корпусе ЛА на некотором расстоянии от оси вращения УАП с возможностью вращения относительно корпуса ЛА.
Недостатком прототипа является неустойчивость в его работе на малых дозвуковых скоростях полета ЛА, что проявляется в незатухающих колебаниях УАП с довольно большой амплитудой. Одной из причин этого является то, что в прототипе нет внешних отрицательных обратных связей по отклонению УАП, и для отклонения УАП на угол Φp, соответствующий заданному углу Φтз отклонения ДУАП, используется только внутренняя отрицательная обратная связь по шарнирному моменту УАП. На малых дозвуковых скоростях полета ЛА шарнирный момент УАП мал и не обеспечивает устойчивой работы привода. Другая причина неустойчивой работы прототипа заключается в том, что выходной рычаг механической проводки, который отклоняет ДУАП при повороте РУ, установлен в корпусе ЛА так, что ось его вращения расположена позади оси вращения УАП. Это приводит к следующему. Пусть в результате поворота РУ выходной рычаг повернулся на некоторый угол и повернул ДУАП на угол Φт по часовой стрелке, после чего остается неподвижным. На ДУАП возникает подъемная сила Vт, направленная вверх. Под действием момента Мт этой силы относительно оси вращения УАП она будет поворачиваться против часовой стрелки, перемещая ось вращения ДУАП вверх. Так как точка шарнирного соединения ДУАП с выходным рычагом остается неподвижной, то ДУАП повернется на дополнительный угол ΔΦт по часовой стрелке. Таким образом, отклонение УАП вызывает дополнительное отклонение ДУАП в сторону увеличения отклонения УАП, т.е. имеет место положительная обратная связь, что приводит к неустойчивой работе прототипа.
Целью данного изобретения является устранение указанного недостатка прототипа, а именно обеспечение устойчивой работы привода с ДУАП во всем широком диапазоне скоростей и высот полета ЛА.
Указанная цель достигается тем, что в рулевой привод дополнительно введены пружина и демпфер, установленные на корпусе ЛА и механически связанные с УАП, а на выходе механической проводки из корпуса ЛА к ДУАП эта проводка проложена вдоль оси вращения УАП. Пружина создает внешнюю отрицательную обратную связь по положению УАП, демпфер колебаний УАП создает внешнюю отрицательную обратную связь по угловой скорости вращения УАП, а прокладка механической проводки от РУ к ДУАП вдоль оси вращения УАП устраняет положительную обратную связь, имеющую место в прототипе, так как при этом угол отклонения ДУАП не зависит от угла отклонения УАП.
На фиг.1 показана конструктивная схема привода; на фиг.2 конструктивная схема соединения пружины и демпфера с осью УАП; на фиг.3 структурная схема привода.
Устройство предлагаемого рулевого привода состоит в следующем.
На РУ 1 закреплен ролик 2, который тросом 3 через направляющие ролики 4 соединен с промежуточным роликом 5, закрепленным на оси 6. На оси 6 закреплен также ведущий ролик 7, который тросом 8, проходящим внутри полой оси 9 УАП 10, установленный в корпусе 11 ЛА с помощью подшипников 12, через промежуточные ролики 13 соединен с ведомым роликом 14, закрепленным на оси 15 ДУАП 16, установленный с помощью подшипников 17 в кронштейнах 18, закрепленных на УАП в районе ее задней кромки, причем ось 15 параллельна оси 9. С помощью рычага 19, закрепленного на оси 9, эта ось соединена со штоком 20 демпфера 21 колебаний УАП. С помощью рычага 22, закрепленного на оси 9, эта ось соединена с пружинами 23, установленными в корпусе 11 ЛА.
Работает предлагаемый привод следующим образом.
Пусть в исходном состоянии углы отклонения Φу РУ 1, Φp УАП 10 и Φт ДУАП 16 равны нулю
Φу = Φр = Φт = 0.
Поворот РУ 1 т ролика 2 на угол Φу ≠ 0 с помощью троса 3 вызывает поворот промежуточного ролика 5 и ведущего ролика 7, поворот которого с помощью троса 8 вызывает поворот ведомого ролика 12, оси 15 и ДУАП 16 на угол Φт.
Φт = Kт•Φу, (1)
где Kt коэффициент передачи от РУ 1 к ДУАП 16. При этом ДУАП 16 окажется в воздушном потоке под углом атаки αт
αт = Φт- Φp, (2)
и на ДУАП 16 возникнут аэродинамические силы Yт и Xт
где C
Cхот коэффициент лобового сопротивления ДУАП 16 при нулевом угле атаки;
Sт площадь ДУАП 16;
q скоростной напор;
ρ плотность воздуха на высоте полета ЛА;
V скорость полета ЛА.
Силы Yт и Xт создают момент Mт относительно оси вращения УАП 10
Mт= (Yт•cosΦp - Xт•sinΦp)•Lp (3)
где Lp расстояние между осями вращения УАП 10 и ДУАП 16.
Под действием Mт УАП 10 начинает поворачиваться, становясь под углом атаки Φp ≠ 0 в воздушном потоке. В результате на УАП 10 создаются аэродинамические силы Yp и Xp
где C
Cхор коэффициент лобового сопротивления УАП 10 при нулевом угле атаки;
Sp площадь УАП 10.
Силы Yp и Xp создают относительно оси вращения УАП 10 момент Mp, который препятствует повороту УАП 10.
Mp= (Yp•cosΦp + Xp•sinΦp)•Lшp (6)
где Lшр -расстояние от оси вращения УАП 10 до точки приложения сил Yp и Xp. Кроме того, при отклонении УАП 10 от нулевого положения создается момент Mпр пружин 23, также препятствующий повороту УАП 10
Mпр = Kпр•L
где Kпр жесткость пружин 23;
L
При вращении УАП 10 с угловой скоростью  p демпфер 21 создает момент Mд, пропорциональный
p демпфер 21 создает момент Mд, пропорциональный  p и направленный противоположно угловой скорости
p и направленный противоположно угловой скорости 

Таким образом, процесс вращения УАП 10 описывается дифференциальным уравнением
где Ip,  момент инерции и угловое ускорение УАП 10.
момент инерции и угловое ускорение УАП 10.
Структурная схема привода, соответствующая рассмотренному алгоритму его работы, показана на фиг.3. Она показывает, что в предлагаемом приводе, кроме внутренних отрицательных обратных связей 1 и 4, присущих также и прототипу, имеются дополнительные внешние отрицательные обратные связи 2 и 3 и отсутствует положительная обратная связь, увеличивающая угол Φт при увеличении угла Φp, присущая прототипу. Все это обеспечивает устойчивую работу привода и высокое качество переходного процесса отклонения УАП 10 в широком диапазоне скоростей и высот полета ЛА.
Справедливость этого вывода подтверждают результаты математического моделирования работы предлагаемого привода на ЭЦВМ, причем УАП 10 и ДУАП 16 имели форму, показанную на фиг.1 с Sp 0,0833 м и Sт 0,006 м. При моделировании был задан следующий закон изменения угла Φт отклонения ДУАП 16 от РУ 1
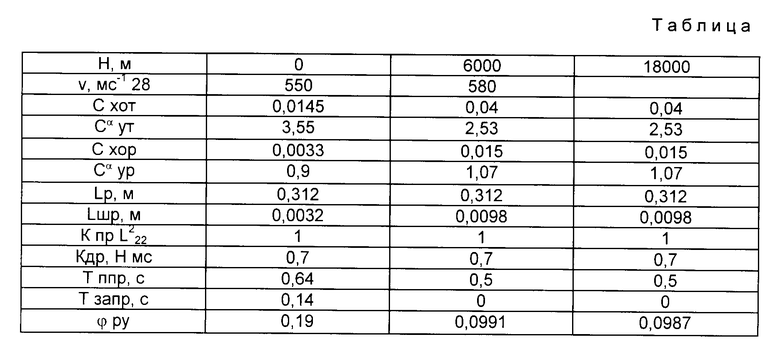
Основные исходные данные и результаты моделирования приведены в таблице.
В таблице указаны:
Tппр время отклонения УАП 10 на установившийся угол Φру с точностью + 0,05Φру;
Tзапр время запаздывания отклонения УАП 10 на угол Φру по отношению к времени t 0,5 с отклонения ДУАП +6 на отклонения ДУАП 16 на угол Φт = 0,3.
Анализ данных, приведенных в таблице, показывает, что предложенный привод практически без запаздывания отклоняет УАП 10 на угол Φру, соответствующий заданному углу Φт отклонения ДУАП 16, в широком диапазоне скоростей и высот полета ЛА, что и является целью изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОЙ АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ | 1993 |
|
RU2072311C1 |
| СПОСОБ ПОВОРОТА УПРАВЛЯЮЩЕЙ АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2193992C2 |
| Рулевой привод управляемой аэродинамической поверхности летательного аппарата | 1990 |
|
SU1794804A1 |
| АЭРОДИНАМИЧЕСКАЯ СХЕМА ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2093417C1 |
| АЭРОДИНАМИЧЕСКАЯ СХЕМА ЛЕТАТЕЛЬНОГО АППАРАТА | 1998 |
|
RU2148533C1 |
| ПРИВОД УБОРКИ И ВЫПУСКА ШАССИ ЛЕТАТЕЛЬНОГО АППАРАТА | 1994 |
|
RU2085445C1 |
| АВТОМОБИЛЬ | 1995 |
|
RU2104895C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГРАНИЦ ОБЛАСТИ ВОЗМОЖНОГО ПУСКА РАКЕТЫ | 2001 |
|
RU2206044C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВЕТРА | 2001 |
|
RU2206112C1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ДВУХКИЛЕВОГО ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КУРСА | 2020 |
|
RU2765837C1 |


Использование: отклонение управляемых аэродинамических поверхностей (АУП) летательного аппарата (ЛА). Сущность: привод, кроме рычага управления (ПУ), установленного в корпусе ЛА, дополнительной управляемой аэродинамической поверхности (ДУАП), установленной на УАП в области ее задней кромки с возможностью вращения вокруг оси, параллельно оси вращения УАП, и механической проводки от РУ и ДУАП, содержит пружину и демпфер, установленные в корпусе ЛА и механически связанные с УАП, а на выходе из корпуса ЛА к ДУАП механическая проводка проложена вдоль оси вращения УАП. 1 табл.,3 ил.
Рулевой привод управляемой аэродинамической поверхности летательного аппарата, который содержит рычаг управления, установленный в корпусе летательного аппарата, дополнительную управляемую аэродинамическую поверхность, установленную на управляемой аэродинамической поверхности в области ее задней кромки с возможностью вращения вокруг оси, параллельной оси вращения управляемой аэродинамической поверхности, и механическую проводку от рычага управления к дополнительной управляемой аэродинамической поверхности, отличающийся тем, что в него введены пружина и демпфер, установленные в корпусе летательного аппарата и механически связанные с управляемой аэродинамической поверхностью, а на выходе из корпуса летательного аппарата к дополнительной управляемой аэродинамической поверхности механическая проводка проложена вдоль оси вращения управляемой аэродинамической поверхности.
| СПОСОБ ПОЛУЧЕНИЯ СТАНДАРТНОЙ ЖИДКОСТИ СЖР-2 ДЛЯ ИСПЫТАНИЯ РЕЗИН И РЕЗИНОТЕХНИЧЕСКИХ ИЗДЕЛИЙ | 2015 |
|
RU2600035C1 |
| Нефтяной конвертер | 1922 |
|
SU64A1 |
