Изобретение относится к области подводной техники, конкретно к устройству глубоководных аппаратов с экипажем на борту.
Известен глубоководный опускаемый аппарат предельных глубин, включающий поплавок; гондолу с установленным в корпусе иллюминатором и смонтированным внутри корпуса гравитационным стеллажом для размещения гидронавта и полезного груза; средства, обеспечивающие вращение корпуса относительно стеллажа вокруг горизонтальной оси; подвесную систему для крепления к поплавку гондолы с возможностью ее поворота в смонтированных на упомянутой горизонтальной оси цапфах: см. патент RU 2121448 С1, МПК В 63 С 11/34, приоритет 16.04.97, опубликован 10.11.98 - прототип изобретения. Этот аппарат-аналог имеет ряд существенных недостатков. Среди них следующие: ограниченные возможности по транспортировке аппарата к месту погружения, сложность операций по спуску аппарата с палубы обеспечивающего судна и по возврату на судно, ограниченность обзора окружающей гидросферы, ограниченные возможности для проведения исследований, недостаточная управляемость аппаратом, неразработанность систем связи и жизнеобеспечения гидронавта.
Изобретение решает техническую задачу комплексного усовершенствования глубоководного опускаемого аппарата предельных глубин, с тем чтобы его конструкция была удобной, безопасной и надежной в эксплуатации, обеспечивала широкий спектр решаемых задач с получением и сохранением большого объема информации, позволяла экипажу находиться и работать под водой на любой глубине в течение продолжительного времени, не требовала больших затрат энергии для своего функционирования.
Указанная задача решается тем, что в глубоководном опускаемом аппарате предельных глубин, включающем поплавок; гондолу с установленным в корпусе иллюминатором и смонтированным внутри корпуса гравитационным стеллажом для размещения гидронавта и полезного груза; средства, обеспечивающие вращение корпуса относительно стеллажа вокруг горизонтальной оси; подвесную систему для крепления к поплавку гондолы с возможностью ее поворота в смонтированных на упомянутой горизонтальной оси цапфах, согласно изобретению по бортам поплавка смонтированы питаемые от бортового источника тока движительные устройства с возможностью их работы в режимах переднего или заднего хода и враздрай; для вращения корпуса относительно стеллажа гондолы в ней смонтирован электропривод; внизу гондолы по вертикальной оси смонтировано скрепленное со стеллажом гироскопическое устройство дифференциального типа в виде встречно вращающихся маховиков, между которыми размещено горизонтально водило с вращающимися на нем колесами-сателлитами, сцепленными с торцами маховиков, причем ось водила расположена по оси маховиков с возможностью подключения к электромашинному генератору тока в целях рекуперативного торможения маховиков; к корпусу гондолы со стороны одной цапфы подсоединен бокс-гараж для размещения телеуправляемого мобильного исследовательского модуля, а со стороны другой цапфы подсоединен бокс с источником электрической энергии для гондолы и компрессорным оборудованием для забора из нее избыточного воздуха; в подвесной системе предусмотрено располагающееся между поплавком и гондолой вращаемое водным потоком в горизонтальной плоскости гидродинамическое рулевое устройство для возможности поворота гондолы вокруг вертикальной оси при опускании и подъеме, причем рули связаны кинематически с гондолой в расчете на управление ими при повороте гондолы в упомянутых цапфах; упомянутое рулевое устройство с гондолой подвешено к поплавку посредством быстроразъемного замкового узла, обеспечивающего транспортировку, спуск на воду и подъем с воды поплавка отдельно от остальной части аппарата; аппарат снабжен волоконно-оптической системой связи с расположенными внутри гондолы матричными оптическими табло и размещенным на иллюминаторе оптическим концентратором.
В частных случаях в глубоководном опускаемом аппарате предельных глубин:
- поплавок выполнен многокорпусным;
- поплавок выполнен однокорпусным в форме цилиндра, сопряженного с верхним и нижним конусами;
- корпус поплавка выполнен из рифленого титанового листа;
- корпус поплавка выполнен из высокопрочного пластика;
- движительные устройства поплавка выполнены в виде гребных винтов;
- движительные устройства поплавка выполнены в виде водометов;
- электропривод для вращения корпуса относительно стеллажа гондолы включает передачу с приводным роликом, размещенным между корпусом и стеллажом;
- гидродинамическое рулевое устройство включает три горизонтально расположенных соосных кольца с поворотными лопастями, смонтированными между двумя находящимися в одной плоскости концентрическими кольцами на соединяющих их радиально осях, а третье, приводное, кольцо расположено в другой плоскости и соединено с лопастями шарнирно;
- на гидродинамическом рулевом устройстве смонтирован герметичный приборный отсек с бортовой ЭВМ и средствами аудио- и видеосвязи;
- замковый узел подвеса рулевого устройства к поплавку включает ползун, взаимодействующий с предусмотренной в поплавке прогнутой книзу балкой-направляющей;
- наружная поверхность волоконно-оптических кабелей содержит химические вещества, отпугивающие морских животных.
От осуществления изобретения ожидается технический результат, совпадающий с существом решаемой задачи.
Изобретение иллюстрируется при помощи фиг.1-11, на которых представлен глубоководный опускаемый аппарат предельных глубин и его отдельные элементы:
- фиг.1 представляет общий вид аппарата;
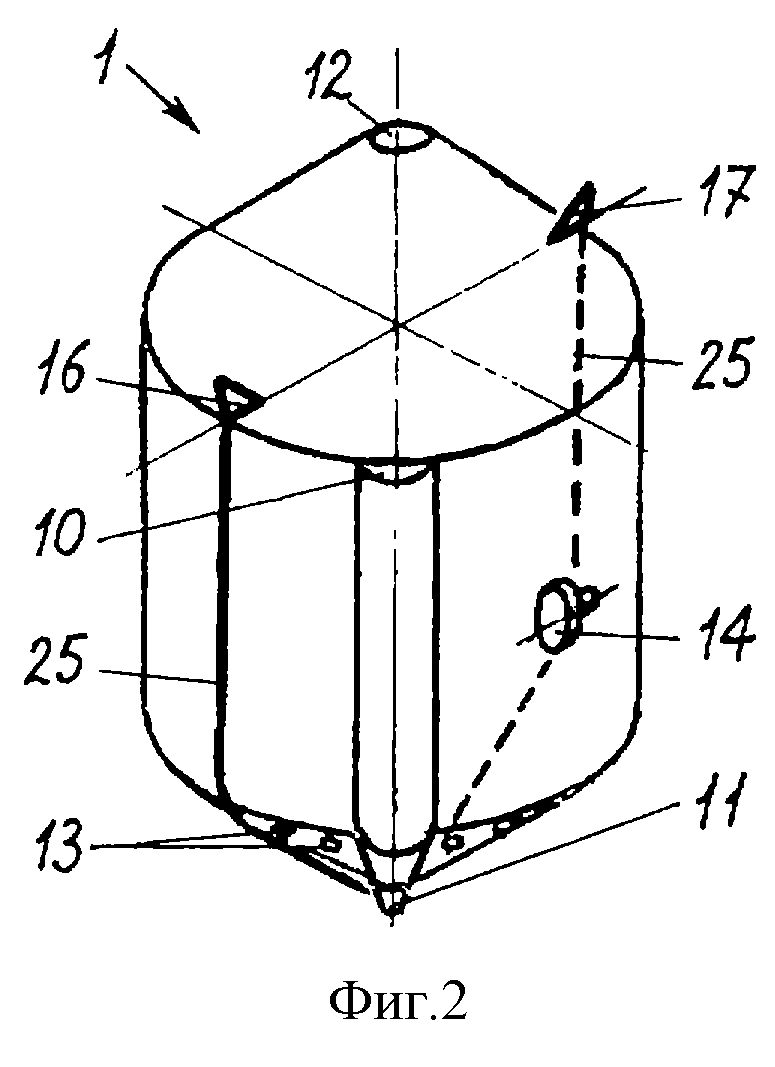
- фиг.2 представляет общий вид варианта поплавка, отличающегося от представленного на фиг.1;
- фиг. 3 показывает одно из мест крепления к поплавку спускоподъемного каната (район узла 16, фиг.1);
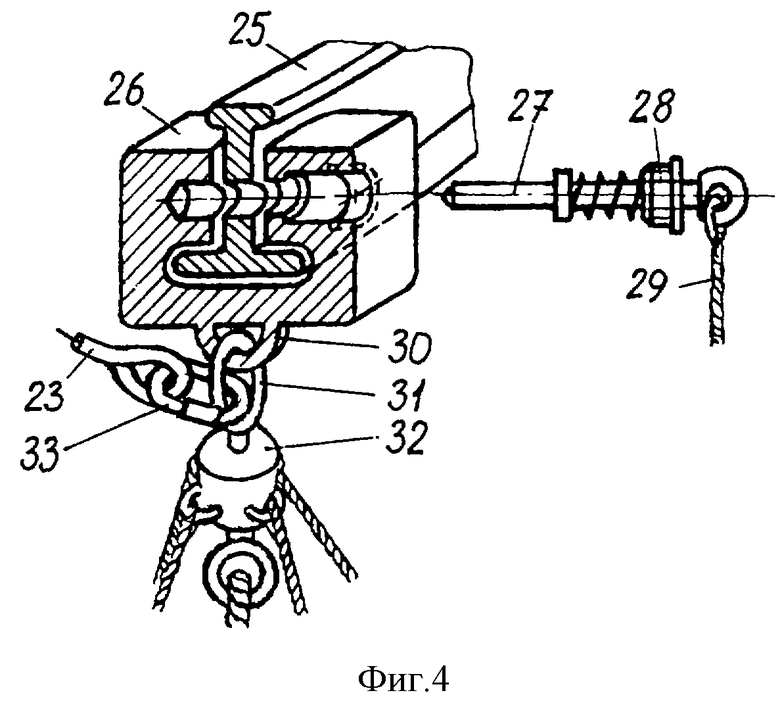
- фиг. 4 представляет узел соединения поплавка с подвесной системой аппарата (место А, фиг.1);
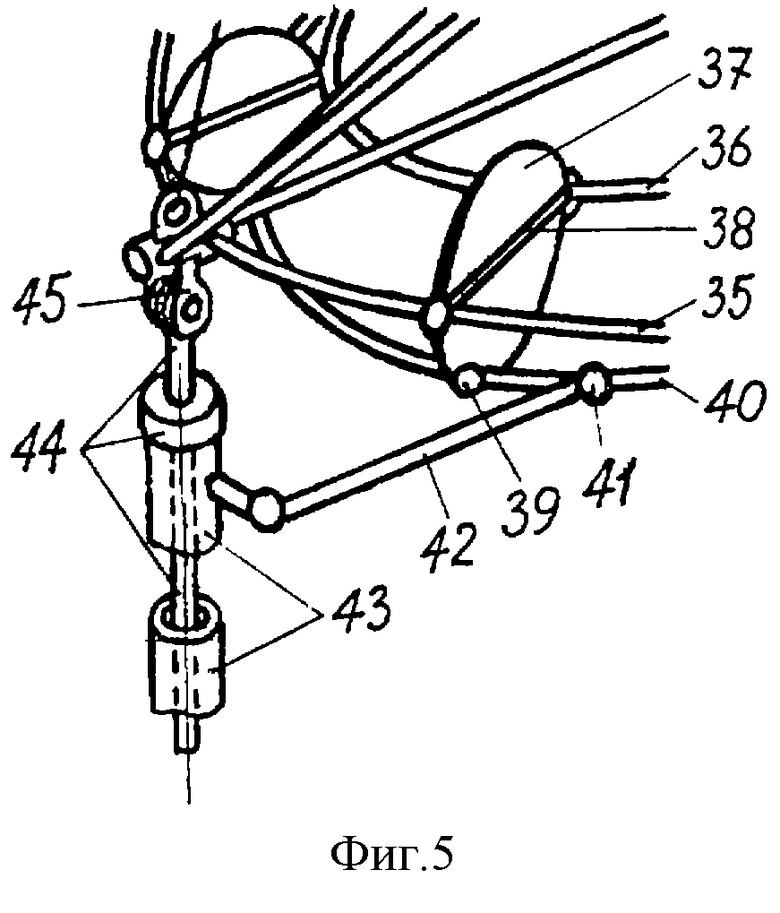
- фиг. 5 показывает гидродинамическое рулевое устройство (место В, фиг. 1);
- фиг.6 представляет фронтальный разрез гондолы;
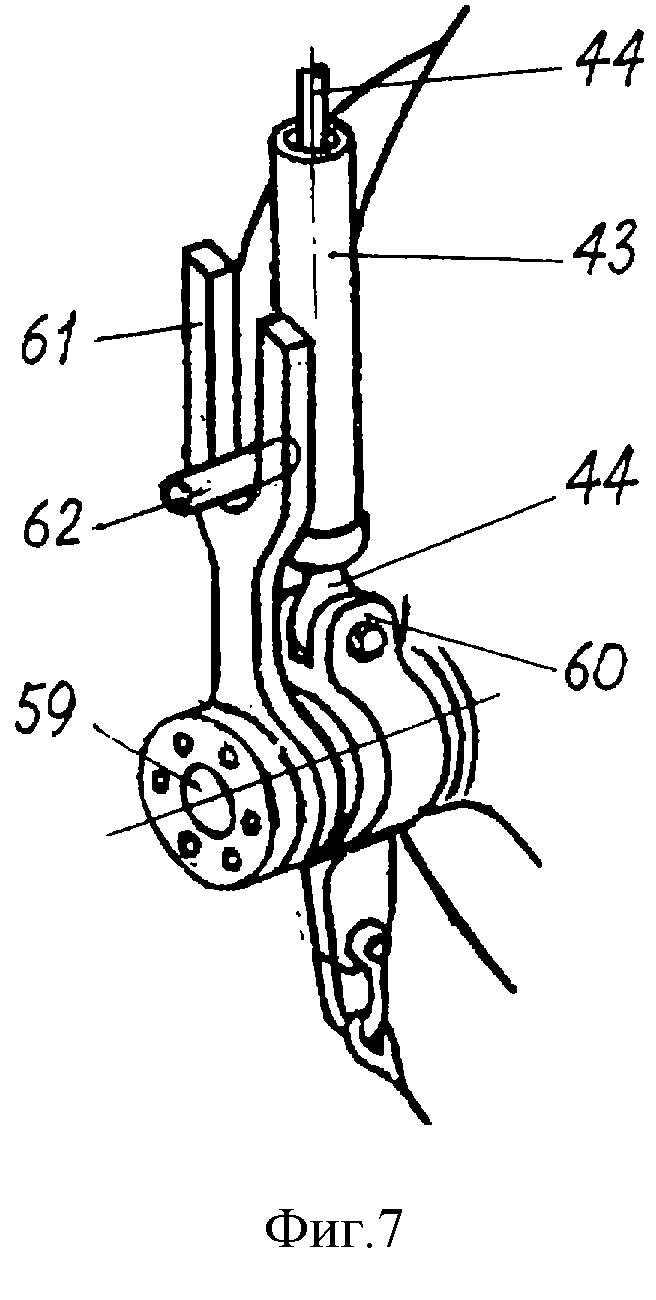
- фиг.7 показывает один из шарнирных узлов подвеса гондолы (в районе цапфы 59, фиг.1);
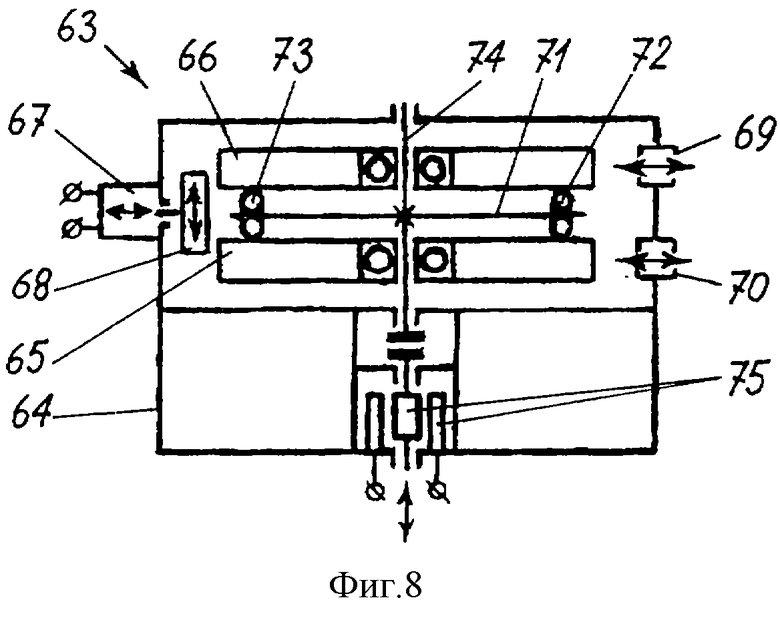
- фиг.8 показывает гироскопическое устройство стабилизации и ориентации гондолы;
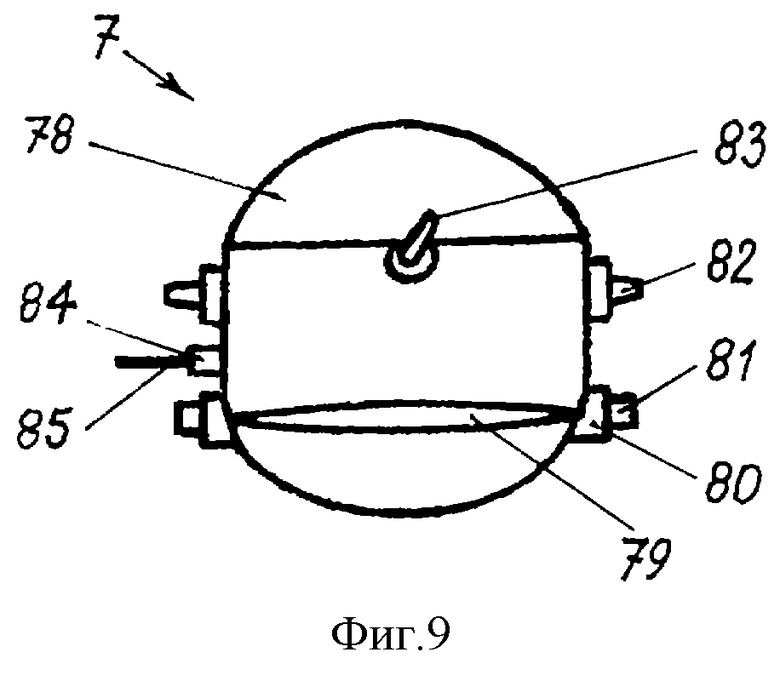
- фиг.9 представляет общий вид (сбоку) телеуправляемого мобильного исследовательского модуля;
- фиг.10 представляет вид из гондолы на область иллюминатора;
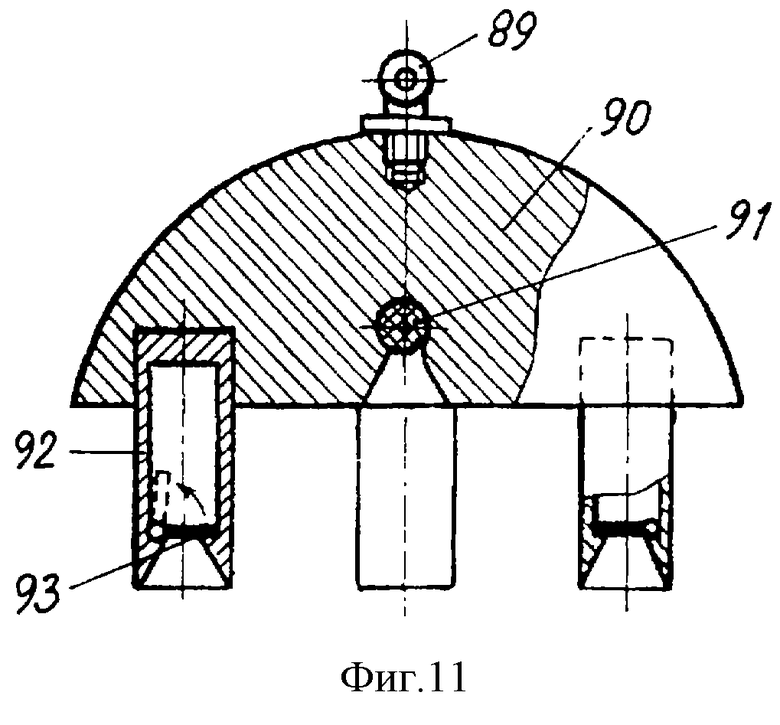
- фиг.11 представляет пригруз с полезными устройствами.
Согласно фиг.1 глубоководный опускаемый аппарат предельных глубин включает поплавок 1 и гондолу 2, прикрепленную к поплавку посредством подвесной системы 3. В ее состав входит рулевое устройство 4 гидродинамического типа; оно непосредственно подвешено к поплавку, а к рулевому устройству присоединена гондола. На ней смонтированы бокс оборудования 5 и бокс-гараж 6. В последнем размещается телеуправляемый мобильный исследовательский модуль 7.
Поплавок предпочтительной конструкции выполнен многокорпусным, конкретно - в виде катамарана, как это показано на фиг.1. Поплавок-катамаран состоит из двух симметричных корпусов 8 и 9 (последний показан условно прозрачным). Корпуса имеют секционную конструкцию с внутренними переборками, выполненную из рифленого титанового листа или из высокопрочного пластика. Внутри каждого корпуса, по центру, предусмотрен бункер для размещения балласта в виде металлических шариков, загружаемых через конус-горловину 10 и сбрасываемых через дюзу 11. В секциях корпусов размещаются герметичные емкости-мешки из бензостойкой прорезиненной ткани с горловинами 12 для заливки легкой фракции бензина. Внизу секций предусмотрены дренажные отверстия 13 для свободного доступа забортной воды внутрь поплавка в целях обжатия емкостей-мешков.
В поплавке имеется отсек для размещения погружных электрических аккумуляторов или альтернативных источников тока, от которых питаются электроприводы расположенных на поплавке (по бортам) движительных устройств 14. Они выполнены, например, в виде гребных винтов либо снабженных поворотными насадками водометов. Движительные устройства устроены и смонтированы так, что могут работать в режиме переднего (маршевого) или заднего хода, а также враздрай.
Наверху поплавка установлен бокс 15, в котором размещены эталонный компенсатор плавучести, радиолокационный отражатель и приборный буй с радиопередатчиком. Он включается автоматически при аварийном всплытии аппарата, например при обрыве спускоподъемного каната, тянущегося с судна обеспечения. Этот канат крепится посредством карабинов к силовым узлам 16 и 17, смонтированным на носу и корме поплавка (эти оконечности выполнены одинаковой формы и по сути не различаются).
На фиг. 2 показан другой вариант поплавка - в форме цилиндра, сопряженного с верхним и нижним конусами. Этот поплавок содержит основные функциональные элементы, присущие поплавку-катамарану; на фиг.2 показана только часть из них.
На фиг. 3 показан район узла 16, где посредством карабина 18 к поплавку крепится спускоподъемный канат. Он выполнен комбинированным: несущий трос 19, изготовленный из высокопрочного синтетического волокна (например, кевлар или аналогичный материал), окружен плавающей защитной оболочкой (полипропилен) 20 (в итоге достигнута нулевая плавучесть каната); в центре размещены снабженные оболочками волоконные световоды 21. Посредством матричной оптической муфты 22 они подсоединены к волоконно-оптической кабельной системе аппарата, конкретно к световодам кабеля 23, который крепится к силовому узлу 16 поплавка посредством карабина 24.
В районе узлов 16 и 17 располагаются концы прогнутой книзу рельсовой балки-направляющей 25, проходящей через продольную плоскость поплавка. К балке-направляющей подсоединена посредством замкового устройства верхняя концевая часть подвесной системы 3. Показанное на фиг.4 (место А, фиг.1) замковое устройство включает ползун 26, который перемещается по балке-направляющей и стопорится внизу ее посредством подпружиненного штифта-фиксатора 27. Он пропущен через отверстия в стыкуемых элементах и удерживается резьбовой втулкой 28. На свободном конце штифта-фиксатора закреплен тросик 29, который используется обеспечивающим водолазом в операциях спуска аппарата на воду с судна и подъема на судно (см. ниже). Внизу ползуна имеется полукольцо 30, к которому крепится кольцо 31 верхнего вертлюга 32 подвеса рулевого устройства 4. К указанному кольцу крепится посредством карабина 33 нижний конец упомянутого выше волоконно-оптического кабеля 23. Он является частью показанной на фиг.1 волоконно-оптической линии связи 34 аппарата.
Рулевое устройство 4, показанное укрупненно на фиг.5 (место В, фиг.1), имеет вид расположенного в горизонтальной плоскости кольца из скрепленных ободьев 35 и 36, между которыми расположены поворотные рулевые диски 37, вращаемые в соединяющих ободья осях 38. Нижние кромки дисков посредством сферических шарниров 39 связаны кинематически с приводным кольцом 40. Его вращательно-поступательное движение приводит к изменению углов установки упомянутых дисков, являющихся гидродинамическими поверхностями. Кольцо 40, в свою очередь, приводится от присоединенной посредством сферического шарнира 41 тяги 42, другой конец которой таким же образом соединен с трубой-штангой 43. Она же надета с возможностью вращения (например, благодаря подшипникам) на вертикальную подвесную тягу 44, верхний конец которой вставлен шарнирно в проушину 45 на рулевом устройстве. Нижний конец подвесной тяги таким же образом соединен с корпусом гондолы 2 (см. ниже). Всего тяг (вместе с соответствующими кинематическими узлами) две и расположены они диаметрально противоположно на горизонтальной оси Х1-Х1 кольцевого рулевого устройства.
Как показано на фиг.1, в центре рулевого устройства может размещаться герметичный приборный отсек 46 сферической формы. Здесь находится автономно функционирующее научное оборудование по обеспечению запланированных исследовательских программ, а также содержится аппаратура для оперативного контроля технического состояния глубоководного опускаемого аппарата и его отдельных систем. В приборном отсеке находятся, в частности, бортовая ЭВМ, глубиномеры, эхолот-гидролокатор, аппаратура звукоподводной связи, приборы аварийной сигнализации, автоматика аварийного всплытия, цифровая видеокамера, разнообразные приборы для исследования океана и океанического дна.
На рулевом устройстве посредством рычажно-тросовой системы может устанавливаться также платформа 47, на которой монтируются антенна для звукоподводной связи, антенна эхолота "вверх - вниз" и осветительная панель. Последняя включает галогенные, ультрафиолетовые и инфракрасные светильники, светосильные светодиоды, снабженные отражателями и прочными акриловыми колбами. Положение платформы 47 может регулироваться по командам из гондолы.
Описанное рулевое устройство со смонтированными на нем элементами крепится к поплавку посредством тросово-стержневой системы, включающей центральный, расположенный по вертикальной оси трос 48 с концами, закрепленными в вертлюгах 32 и 49. Это обеспечивает возможность вращения рулевого устройства в горизонтальной плоскости относительно поплавка. Как будет показано ниже, часть подвесной системы 3, соединяющая рулевое устройство с гондолой, устроена таким образом, чтобы передать это вращение вокруг вертикальной оси гондоле.
В дополнение к фиг.1, где гондола показана в составе глубоководного опускаемого аппарата, на фиг.6 представлен схематично фронтальный разрез гондолы - в плоскости расположения горизонтальной оси Х2 - Х2, ориентированной параллельно оси Х1 -Х1. Гондола имеет прочный сферический корпус 50, рассчитанный на размещение одного гидронавта. Для возможности наблюдения окружающей гидросреды корпус снабжен (показанным на фиг.1) иллюминатором 51. Это вставка из прочного прозрачного материала, выполненная в форме усеченного конуса, ось которого ориентирована перпендикулярно упомянутой выше фронтальной плоскости.
Оборудование в гондоле размещается на гравитационном стеллаже, состоящем из двух симметричных боковых частей 52 и 53, которые выполнены в виде сферических сегментов-обечаек и скреплены рамой 54. Поверхность стеллажа, обращенная к корпусу гондолы, снабжена обоймами 55 с шариками, которые входят в желоба 56, смонтированные изнутри корпуса. Благодаря этому корпус и стеллаж могут вращаться относительно друг друга вокруг оси Х2 - Х2. Вращение может осуществляться посредством размещенного между указанными элементами приводного ролика (фрикционной или иной) передачи момента от вала электродвигателя 57, который смонтирован на стеллаже. Стеллаж является устройством гравитационного типа: центр масс загруженного полезным грузом стеллажа расположен ниже упомянутой оси вращения и при отклонении от нормального положения стеллаж стремится вновь занять это первоначально устойчивое положение. Как показано на фиг.1, на корпусе гондолы по оси Х2 - Х2 смонтированы цапфы 58 и 59, посредством которых гондола шарнирно установлена (подвешена) в глубоководном опускаемом аппарате. Относительно оси расположения цапф гондола статически уравновешена.
Как показано на фиг.7, шарнирный узел подвеса гондолы (всего два) включает не скрепленную жестко с цапфой 59 проушину 60, в оси которой установлена подвесная тяга 44, таким же образом соединенная другим концом с рулевым устройством 4 (см. фиг. 5). На цапфе закреплена вилка 61, которая взаимодействует с поводком 62 на поворотной трубе-штанге 43. Благодаря этому вращательное движение гондолы вокруг горизонтальной оси цапф Х2-Х2 преобразуется во вращательно-поступательное движение кольца 40 рулевого устройства 4 вокруг вертикальной оси. В конечном счете, это приводит к вращению вокруг нее гондолы.
Как показано на фиг. 6, в дополнение к описанному рулевому устройству гидродинамического типа в целях управления положением гондолы внизу гравитационного стеллажа смонтировано гироскопическое устройство 63; его рама 64 прикреплена к раме 54 стеллажа. Представленное на фиг.8, это гироскопическое устройство дифференциального типа включает ориентированные по вертикальной оси гондолы Y-Y одинаковые реактивные маховые массы 65 и 66. Для их разгона предусмотрен приводной электродвигатель 67, вал которого подсоединяется к маховикам посредством передачи 68 (обычно фрикционной) таким образом, чтобы обеспечить вращение маховиков в разные стороны. Устройство передачи позволяет также приводить маховики по отдельности друг от друга. Они снабжены (обычно фрикционными) средствами торможения 69 и 70. Между маховиками расположено горизонтально водило 71 с вращающимися на нем, сцепленными с торцами маховиков колесами-сателлитами 72 и 73. Само водило смонтировано на оси 74, которая ориентирована по оси Y-Y и рассчитана на возможность сцепления с ротором электромашинного генератора тока 75.
Гидронавт входит в гондолу через полусферический люк 76, расположенный на корпусе гондолы диаметрально противоположно иллюминатору (см. фиг.1). В гондоле гидронавт располагается на откидном анатомическом кресле-лежаке 77, которое смонтировано на раме 54 (см. фиг.6). Гидронавт одет в костюм с вшитым коллектором из распределенных по телу гибких проницаемых трубчатых элементов. В них подается воздух с регулируемой температурой при помощи электрофена, размещенного на поясе гидронавта.
Для обеспечения жизненных функций и возможности работы гидронавта внутрь гондолы помещаются следующие приборы и оборудование:
- система регенерации воздуха с датчиками-анализаторами его состава и сигнализаторами;
- осветительная система;
- термос с пищей и питьем;
- писсуар;
- аварийный фонарь;
- прибор замера радиации;
- диктофон;
- цифровая видеокамера;
- кнопочный пульт дистанционного управления бортовой ЭВМ (находящейся в приборном отсеке 46) с инфракрасным излучателем;
- джойстик управления мобильным исследовательским модулем 7;
- матричные оптические табло (аудио- и видеомониторы) для информации гидронавта (см. ниже).
Остальное оборудование, необходимое для гидронавта, предпочтительно размещено в герметичном боксе оборудования 5, который сообщается с внутренним пространством гондолы, будучи присоединен к ее корпусу со стороны цапфы 59 (см. фиг.1). В указанном боксе находятся, в частности, аккумуляторная батарея для энергоснабжения гондолы и компрессорная установка с электроприводом, обеспечивающая нормальное атмосферное давление в гондоле.
Противоположно боксу оборудования 5 на гондоле смонтирован бокс-гараж 6, в котором размещен телеуправляемый мобильный исследовательский модуль (дистанционный аппарат наблюдения, ДАН) 7. Представление о его устройстве дает общий вид модуля (сбоку), показанный на фиг.9. Он представляет собой сплюснутое по бокам обтекаемое симметричное тело положительной плавучести со смещенным книзу (относительно центра плавучести) центром масс, что обеспечивает устойчивое вертикальное положение модуля. Его корпус выполнен из пластика и снабжен верхним килем 78 и двумя симметричными боковыми плавниками-стабилизаторами 79. Рядом с ними в носовой и кормовой частях ДАНа расположены окруженные источниками света (свето-диодами) 80 акриловые иллюминаторы 81 для размещенных внутри ДАНа (в прочных титановых боксах) цифровых видеокамер обзора полной гидросферы (с записью изображения). Над иллюминаторами находятся управляемые (поворотные) маршевые сопла 82 водометного движителя. В поперечной плоскости модуля установлены V-образно водометные сопла-заглубители 83 для регулирования плавучести.
В кормовой части ДАНа имеется направляющая 84 для волоконно-оптического кабеля 85, соединяющего модуль с гондолой. Из нее на модуль посылаются (джойстиком) управляющие сигналы, а в обратном направлении передается телеинформация. Волоконно-оптический кабель в полиэтиленовой оболочке имеет практически нулевую плавучесть и способен выдержать любое давление водной среды. При необходимости оболочка может быть усилена. Кабель намотан на барабан с электроприводом, размещенные в корпусе ДАНа. Здесь же находится электрическая батарея малой емкости для возможности аварийного наматывания кабеля в целях возврата модуля в бокс-гараж. Все остальные, штатные, операции по функционированию ДАНа обеспечиваются энергоснабжением от аккумулятора, находящегося в боксе оборудования 5.
В целях подачи управляющих команд, приема-передачи цифровой аудио- и видеоинформации и связи гидронавта с обеспечивающим судном различные функциональные элементы глубоководного опускаемого аппарата объединены между собой и сообщены с обеспечивающим судном посредством волоконно-оптической линии связи, в состав которой входят упомянутые выше кабели. Разводка линии 34 представлена на фиг. 1 схематично, без детализации: она включает несколько участков, которые выведены, в частности, в приборный отсек 46 и на оптический концентратор 86, размещенный на иллюминаторе гондолы. Как показано на фиг. 10, внутри гондолы (в районе иллюминатора) смонтированы многочисленные матричные оптические табло 87, представляющие собой мониторы аудио- и видеоинформации для гидронавта. Чтобы исключить опасность повреждения (перекусывания) кабелей морскими животными (особенно это касается спускоподъемного каната), в их наружную поверхность могут вводиться (включаться) отпугивающие химические вещества (составы).
Как показано на фиг.1, гондола может снабжаться подвеской 88 для крепления гайдропа с пригрузом. Представленный на фиг.11 пригруз представляет собой снабженную подвесным кольцом 89 массивную чугунную чушку 90. В ее толще могут размещаться ряд полезных устройств, например кассетный сейсмозаряд 91 для зондирования океанского дна и (расположенные по периферии) заборники 92 для приема кернов донной породы. (Приборы для записи сейсмограмм размещены в отсеке 46 аппарата). Заборники выполнены в виде снабженных поворотными подпружиненными заслонками 93 цилиндров с острыми концами, позволяющими заборникам врезаться в донный грунт под тяжестью пригруза. При этом заслонки отжимаются (как это изображено штриховыми линиями) и происходит забор керна. После отрыва пригруза от грунта заслонки закрываются, удерживая керн. На случай аварии (например, подсоса аппарата) предусмотрены (не показанные на фиг.) средства экстренного сброса пригруза.
Предлагаемый глубоководный опускаемый аппарат предельных глубин функционирует следующим образом.
Обеспечивающее судно доставляет в заданный район мирового океана размещенные на палубе поплавок 1 и отдельно от него гондолу 2 в сборе с подвесной системой 3. Приведение глубоководного опускаемого аппарата в рабочее состояние начинается со спуска на воду частично снаряженного поплавка на прикрепленном к узлам 16 и 17 спускоподъемном канате от судовой лебедки. После этого гондола, в которой уже находится гидронавт, вместе с подвесной системой захватывается стрелой судового крана в районе вертлюга 49, опускается на воду и подводится к поплавку. Обеспечивающий водолаз надевает ползун 26 на конец рельсовой балки-направляющей 25 и оттягивает за тросик 29 штифт-фиксатор 27; при этом его пружина сжимается. После соскальзывания ползуна в балку-направляющую тросик отпускается, а ползун продолжает двигаться по балке-направляющей до ее нижней точки, где пружина вводит штифт-фиксатор в соответствующие стыковочные отверстия. Теперь, когда глубоководный опускаемый аппарат полностью собран, крановый трос отсоединяют. При этом заполненные бензином емкости-мешки и частично загруженные отсеки балласта обеспечивают погружение аппарата в воду до уровня верхней палубы поплавка. Затем его догружают расчетным эталонным количеством балласта (до необходимой отрицательной плавучести) и начинают погружение аппарата, который вывешен на спускоподъемном канате, сматывая этот канат с барабана судовой лебедки. Для достижения больших глубин используют попеременно две лебедки со сменными барабанами, канаты с которых (например, километровой длины) соединяют в процессе опускания аппарата, используя для этого карабины и оптические муфты.
Гидронавт может пользоваться смонтированными на поплавке бортовыми движителями 14 для совершения необходимых маневров. Все время гидронавт имеет возможность общаться с диспетчером обеспечивающего судна, который контролирует операции. Оба участника получают необходимую оперативную информацию о техническом состоянии аппарата и его удалении от океанского дна по показаниям аппаратуры, находящейся в приборном отсеке 46. При погружении гидронавт имеет возможность контролировать пространственное положение гондолы (и, следовательно, иллюминатора) в целях управления обзором окружающей гидросферы. Для этого гидронавт включает приводной электродвигатель 57 на гравитационном стеллаже 52 - 53 и корпус гондолы начинает вращаться в цапфах 58, 59 (вокруг горизонтальной оси Х2 - X2) в ту или другую сторону. При этом меняется положение иллюминатора 51 в вертикальной плоскости обозреваемой гидросферы. Наряду с этим, благодаря предусмотренным кинематическим связям гондолы с управляющими гидродинамическими поверхностями 37 рулевого устройства 4, меняется их пространственное положение относительно набегающего потока воды и он разворачивает рулевое устройство, а с ним и гондолу в новое круговое положение относительно вертикали. Подобным образом в случае нежелательного вращения гондолы, вызванного воздействием подводного течения на рулевое устройство или непосредственно на гондолу, гидронавт может вернуть ее в исходное положение.
После того как аппарат погрузился на заданную глубину (достиг дна и завис над ним) рулевое гидродинамическое устройство становится неработоспособным (вследствие прекращения движения аппарата относительно воды). На этот случай предусмотрена возможность кругового обзора гидросферы (вокруг вертикали) за счет гироскопического устройства 63. Для этого вал его приводного электродвигателя 67 вводят в сцепление с маховиками 65, 66 и включением электродвигателя раскручивают маховики в разные стороны, после чего электродвигатель отсоединяют. Пока маховики вращаются с одинаковой окружной скоростью, сказывается стабилизирующий эффект гироскопического устройства, обеспечивающий неизменное положение стеллажа гондолы по вертикали. При подтормаживании того или другого маховика корпус гондолы (через стеллаж) закручивается за счет реактивного момента в сторону вращения заторможенного маховика. Высвобождающаяся кинетическая энергия его частично сообщается гондоле, а частично через колеса-сателлиты 72 и 73 - другому маховику, убыстряя его вращение. Часть энергии торможения передается через колеса-сателлиты водилу 71, которое начинает вращаться и вращает подсоединенный к нему ротор электромашинного генератора тока 75. Вырабатываемая при этом электрическая энергия используется для подзарядки источников питания аппарата. Таким образом, осуществляется частичная рекуперация высвобождающейся энергии торможения маховика.
Гироскопическое устройство 63 может использоваться и в процессе погружения аппарата, обеспечивая при совместной работе с гидродинамическим рулевым устройством 4 более эффективное управление положением гондолы (повышая быстроту и точность).За счет совместного управления гондолой в вертикальной и горизонтальной плоскостях гидронавт получает возможность широкого обзора через ограниченное пространство иллюминатора, который можно сориентировать в любом желаемом направлении.
Смонтированные на поплавке бортовые движители 14 дают гидронавту возможность осуществлять маневры под водой (согласуя их с обеспечивающим судном), что существенно расширяет исследовательские возможности аппарата.
Телеуправляемый мобильный исследовательский модуль, который может быть послан гидронавтом на расстояние от гондолы до 150 м, позволяет исследовать весьма обширную гидросферу вокруг гондолы. При этом модуль можно перемещать в водной толще по любой траектории, управляя его водометными микродвижителями из гондолы при помощи джойстика.
Обычная программа работ под водой рассчитана на несколько (до трех) суток. В течение этого времени внутри гондолы поддерживается нормальное атмосферное давление за счет сброса избыточного воздуха в бокс оборудования 5, где он нагнетается компрессором в предусмотренный для этого пустой баллон.
После того как исследования завершены, аппарат поднимают (наматывая спускоподъемный канат судовой лебедкой) на поверхность воды, а с нее - на судно обеспечения в последовательности, обратной спуску аппарата. Аварийный подъем (который может потребоваться, например, при присасывании гондолы к грунту, а также в случае внештатных ситуаций при опускании и подъеме) осуществляют путем сброса балласта. При этом аппарат быстро всплывает за счет приобретения значительной положительной плавучести.
Представленное на фиг.1-11 устройство глубоководного опускаемого аппарата предельных глубин не исчерпывает существо изобретения; например:
- поплавок может выполняться с корпусом других геометрических форм;
- балка-направляющая поплавка может иметь другой профиль;
- управляющие поверхности гидродинамического рулевого устройства могут иметь различную форму и приводиться в действие другим механизмом;
- для передачи движения от гондолы на гидродинамические рули могут использоваться шестеренчатые кинематические звенья, а подвесные тяги могут выполняться в виде предварительно напряженных тросов и т.д.
Предлагаемый глубоководный опускаемый аппарат предельных глубин может применяться, в частности, в следующих целях:
- для проведения океанологических исследований;
- для разведки полезных ископаемых на дне морей и океанов;
- для проверки состояния подводных кабелей связи, газо- и нефтепроводов;
- для обнаружения и инспектирования затонувших судов и их содержимого;
- для иных подводных исследований, требующих проникновения в разломы, щели и проемы на морском дне с передачей информации на поверхность.
Как видно из приведенного описания, предлагаемый глубоководный опускаемый аппарат для достижения предельных глубин характеризуется целым комплексом технических достоинств. Прежде всего, этот аппарат удобен в обслуживании. Он выполнен таким образом, что может доставляться в район погружения по частям многими видами транспорта: от вертолета до судна обеспечения. Аппарат легко спускается на воду и быстро приводится в рабочее положение даже в штормовую погоду. Так же легко аппарат вновь принимается на судно обеспечения в сложных метеоусловиях.
Предлагаемый аппарат надежен, поскольку сферическая форма гондолы для размещения гидронавта выполнена с ограниченным числом отверстий минимального размера (для пропускания тонких световодов). Кроме того, в процессе всех операций аппарат находится под постоянным контролем гидронавта и персонала обеспечивающего судна. При аварийном всплытии, например в случае обрыва спускоподъемного каната, аппарат быстро обнаруживается благодаря автоматическому включению радиопередатчика. После этого гондола с гидронавтом оперативно поднимается с воды.
По желанию гидронавта относительное положение иллюминатора гондолы внутри наблюдаемой гидросферы может изменяться любым образом, причем это не требует больших энергозатрат и осуществляется без расходования рабочих тел. Функциональные возможности аппарата весьма расширяются благодаря наличию в нем телеуправляемого мобильного исследовательского модуля.
Предусмотренная в аппарате волоконно-оптическая система связи обеспечивает надежность приема-передачи информации.
Вышеизложенное подтверждает технический результат, ожидаемый от осуществления изобретения. Предлагаемый глубоководный опускаемый аппарат предельных глубин оправдывает свое назначение. Он является действительно эффективным средством для исследования и освоения мирового океана. Превосходя по техническим возможностям известные глубоководные аппараты (изготовленные к настоящему времени в единичных экземплярах), предлагаемый аппарат намного дешевле их в эксплуатации, а также в изготовлении; он может производиться серийно.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГЛУБОКОВОДНЫЙ ДОБЫЧНОЙ КОМПЛЕКС И ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ РОБОТ | 2002 |
|
RU2214510C1 |
| ГЛУБОКОВОДНЫЙ СПУСКАЕМЫЙ АППАРАТ | 1997 |
|
RU2121448C1 |
| СПОСОБ ДОБЫЧИ ГАЗА В ОТКРЫТОМ МОРЕ | 1994 |
|
RU2078199C1 |
| СУДОВОЙ КОМПЛЕКС И ОПУСКАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2004 |
|
RU2262465C1 |
| БЫСТРОРАЗВЕРТЫВАЕМЫЙ КОМПЛЕКС ПОИСКА ЗАТОНУВШИХ ОБЪЕКТОВ | 2020 |
|
RU2746060C1 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ОБСЛЕДОВАНИЯ ДНА АКВАТОРИИ | 2020 |
|
RU2733565C1 |
| ТЕЛЕУПРАВЛЯЕМЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2024 |
|
RU2829517C1 |
| КОМБИНИРОВАННЫЙ ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2022 |
|
RU2809785C1 |
| ДЫХАТЕЛЬНЫЙ АППАРАТ ИНДИВИДУАЛЬНОГО ПОЛЬЗОВАНИЯ | 2002 |
|
RU2203704C1 |
| ШЛЕМ ДЛЯ ДЫХАТЕЛЬНОГО АППАРАТА | 2002 |
|
RU2203705C1 |



Изобретение относится к области подводной техники, в частности к устройству глубоководных опускаемых аппаратов. Аппарат включает поплавок, гондолу с установленным в корпусе иллюминатором и смонтированным внутри корпуса гравитационным стеллажом для размещения гидронавта и полезного груза, подвесную систему с быстроразъемным замковым узлом для крепления к поплавку гондолы с возможностью поворота ее корпуса в смонтированных на горизонтальной оси цапфах. По бортам поплавка установлены питаемые от бортового источника тока движительные устройства. Внизу гондолы по вертикальной оси смонтировано скрепленное со стеллажом гироскопическое устройство дифференциального типа в виде встречно вращающихся маховиков. К гондоле со стороны цапф подсоединены бокс-гараж для размещения телеуправляемого мобильного исследовательского модуля и бокс с источником электрической энергии для гондолы и компрессорным оборудованием для забора из нее избыточного воздуха. В подвесной системе предусмотрено располагающееся между поплавком и гондолой вращаемое водным потоком в горизонтальной плоскости гидродинамическое рулевое устройство. Рули связаны кинематически с гондолой в расчете на управление ими при повороте гондолы в упомянутых цапфах. Аппарат снабжен волоконно-оптической системой связи. Достигается повышение надежности и безопасности аппарата. 11 з.п. ф-лы, 11 ил.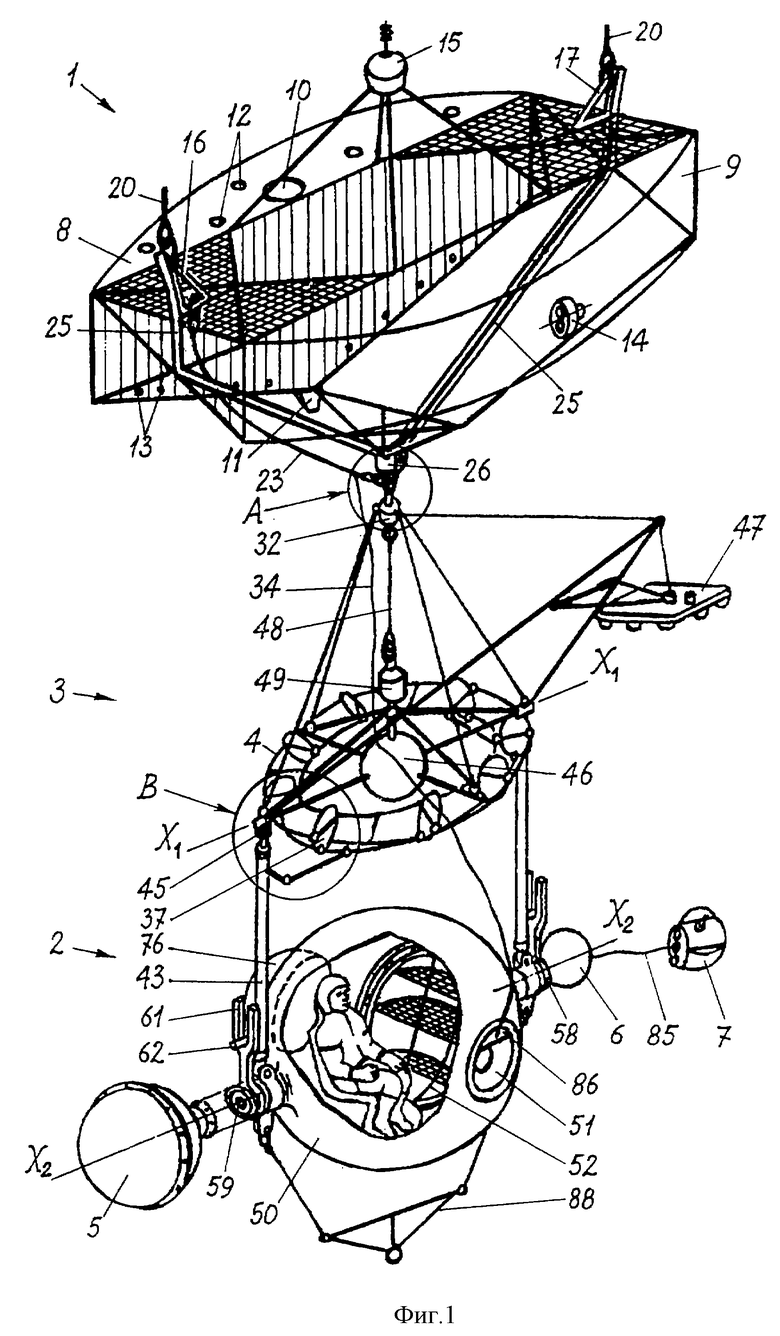
| ГЛУБОКОВОДНЫЙ СПУСКАЕМЫЙ АППАРАТ | 1997 |
|
RU2121448C1 |
| Аппарат для работы под водою | 1934 |
|
SU43544A1 |
| СПОСОБ МОДИФИКАЦИИ ОКРАШЕННОЙ ХЛОПЧАТОБУМАЖНОЙ ТКАНИ | 1987 |
|
RU2041301C1 |
| РЕШЕТЧАТАЯ КОНСТРУКЦИЯ ДЛЯ РЕАКТОРА С ПСЕВДООЖИЖЕННЫМ СЛОЕМ И СПОСОБ УДАЛЕНИЯ КРУПНОГО МАТЕРИАЛА ИЗ РЕАКТОРА С ПСЕВДООЖИЖЕННЫМ СЛОЕМ | 2003 |
|
RU2288031C2 |

