Изобретение относится к области космической техники и может быть использовано для доставки связных спутников на ГСО.
Известен космический аппарат (КА) для обеспечения связи и передачи данных, содержащий в своем составе базовый блок, включающий двигательную установку довыведения, коррекции орбиты и ориентации на основе жидкостного ракетного двигателя большой тяги, систему электропитания на основе солнечных батарей и аккумуляторов, и модуль полезной нагрузки, содержащий аннтенно-фидерные устройства и другие модули полезной нагрузки [1].
Основной недостаток аппаратов данного типа состоит в том, что используемая в них двигательная установка основана на ракетных двигателях большой тяги, которые хотя и позволяют осуществлять быстрое довыведение КА с геопереходной орбиты на геостационарную, но в виду малого удельного импульса требуют больших затрат топлива, что уменьшает массу выводимого на рабочую орбиту полезного груза.
Известен КА связи с двигательной установкой для довыведения, коррекции и ориентации на основе электроракетных двигателей малой тяги, содержащий базовый блок, который в свою очередь содержит систему хранения и подачи рабочего тела, систему электропитания и преобразования на основе солнечных или ядерных источников питания и электроракетные двигатели малой тяги, и модуль полезной нагрузки, содержащий целевую аппаратуру, соединенные вместе в одном корпусе. Технический облик такого связного КА на основе солнечных батарей представлен в работе [2].
Такой КА с электроракетными двигателями, обладающими значительно большим удельным импульсом, чем химические ракетные двигатели, позволит доставить на рабочую орбиту значительно большую массу полезного груза. Кроме этого операции по коррекции орбиты и поддержанию ориентации КА в течение активного срока его эксплуатации потребуют значительно меньших затрат рабочего тела. Однако, выполнение КА в виде цельного моноблока приводит к необходимости обеспечивать для управления вектором тяги дополнительные управляющие моменты посредством отклонения электроракетных двигателей в карданных подвесах, что приводит к дополнительным затратам энергии и массы рабочего тела. Кроме этого моноблочная схема не позволяет выполнить солнечные батареи по двухстепенной схеме наведения на Солнце, поэтому для обеспечения их постоянной освещенности потребуется постоянное вращение всего КА вокруг оси крена, что приведет к значительному усложнению системы управления и, как следствие, к ее удорожанию. Компактное расположение электроракетных двигателей, солнечных батарей и оборудования полезной нагрузки приводит к ухудшению качества принимаемого и передаваемого сигнала при работе электроракетных двигателей, а также к эрозии элементов конструкции и солнечных батарей (или ядерной энергетической установки).
В качестве прототипа может быть взят КА с двигательной установкой для довыведения и коррекции на основе электроракетных двигателей малой тяги, содержащий энергетический модуль, который содержит ядерную энергетическую установку, включающую реактор и высокотемпературный холодильник-излучатель, двигательный модуль, включающий электроракетные двигатели, установленные в карданных подвесах, и преобразователи напряжения с низкотемпературными холодильниками-излучателями, и модуль полезной нагрузки удаленный от энергетического и двигательного модуля с помощью раздвижной фермы. Причем длина фермы выбирается так, чтобы центр тяжести располагался в районе двигательного модуля, а тяга электроракетных двигателей направлена перпендикулярно продольной оси КА [3].
Такой КА с электроракетными двигателями, обладающими значительно большим удельным импульсом, чем химические ракетные двигатели, позволит доставить на рабочую орбиту значительно большую массу полезного груза. Кроме этого операции по коррекции орбиты и поддержанию ориентации КА в течение активного срока его эксплуатации потребуют значительно меньших затрат рабочего тела. Однако, установка электроракетных двигателей только на одной стороне двигательного модуля приводит к необходимости обеспечивать для управления вектором тяги дополнительные управляющие моменты посредством отклонения электроракетных двигателей в карданных подвесах, что приводит к дополнительным затратам энергии и массы рабочего тела. Компактное расположение электроракетных двигателей и энергетической установки приводит к эрозии ее элементов.
Сущность изобретения заключается в том, что в космический аппарат с двигательной установкой малой тяги, содержащий энергетический модуль, двигательный модуль с электроракетными двигателями, модуль полезной нагрузки и раздвижную ферму, соединяющую двигательный модуль и модуль полезной нагрузки, введена вторая раздвижная ферма соединяющая энергетический и двигательный модули, а электроракетные двигатели расположены на противоположных сторонах двигательного модуля. Электроракетные двигатели расположены на поворотных относительно оси тангажа или крена платформах, расположенных на откидных или раздвижных фермах. Двигательный модуль выполнен поворотным, а электроракетные двигатели расположены на поворотных относительно оси тангажа платформах, размещенных на откидных или раздвижных фермах.
Техническим результатом, достигаемым с помощью заявленного изобретения, является существенное уменьшение эррозионного влияния работающих электроракетных двигателей на конструктивные элементы энергетического модуля, улучшение устойчивости гравитационной стабилизации КА, упрощение и, следовательно, удешевление системы управления космического аппарата. Указанные эффекты достигаются следующим образом:
1) размещение между энергетическим и двигательным модулями дополнительной раздвижной фермы приводит к их взаимному удалению, что уменьшает эррозионное воздействие реактивных струй работающих электроракетных двигателей;
2) увеличение, за счет введения дополнительной раздвижной фермы, общей длины КА приводит к усилению гравитационной стабилизации КА;
3) размещение электроракетных двигателей на противоположных сторонах двигательного модуля так, чтобы создаваемая ими тяга была направлена вдоль осей тангажа и крена, позволит управлять направлением вектора тяги без затрат рабочего тела и мощности путем изменения величины трансверсальной и нормальной составляющих вектора;
4) размещение электроракетных двигателей на поворотных относительно оси тангажа или крена платформах, расположенных на откидных или раздвижных фермах, так, чтобы создаваемая ими тяга была направлена вдоль осей тангажа и крена позволит реализовывать более эффективные законы управления без затрат рабочего тела на управление и изменения ориентации всего КА, что сократит расход рабочего тела на выполнение транспортной операции;
5) выполнение поворотным относительно продольной оси КА (оси рыскания) всего двигательного модуля, содержащей откидные или раздвижные фермы с поворотными относительно оси тангажа платформами с электроракетными двигателями, создающими тягу вдоль оси крена, позволит уменьшить общее число электроракетных двигателей и, следовательно, уменьшить стоимость КА.
На фиг. 1 представлен общий вид космического аппарата в рабочем состоянии.
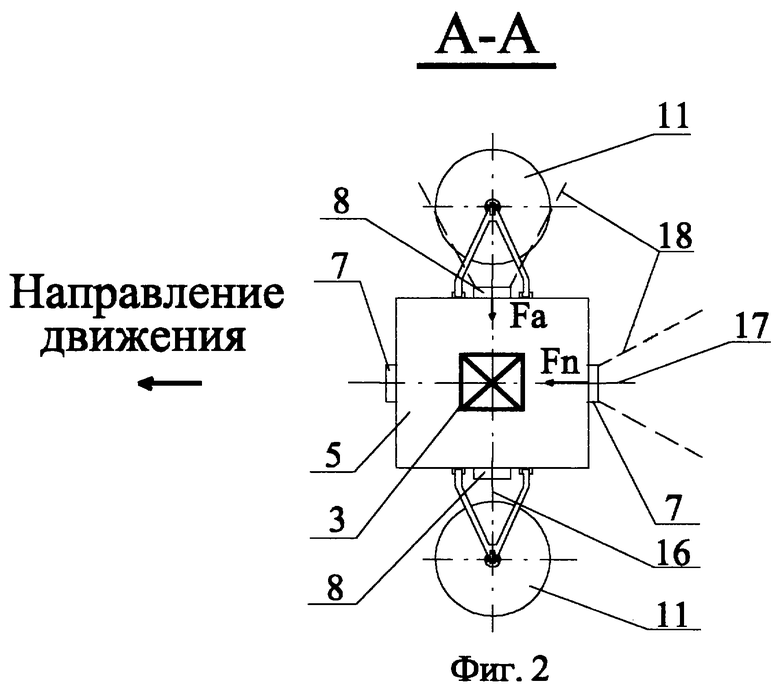
На фиг.2 представлено сечение А-А по фиг.1.
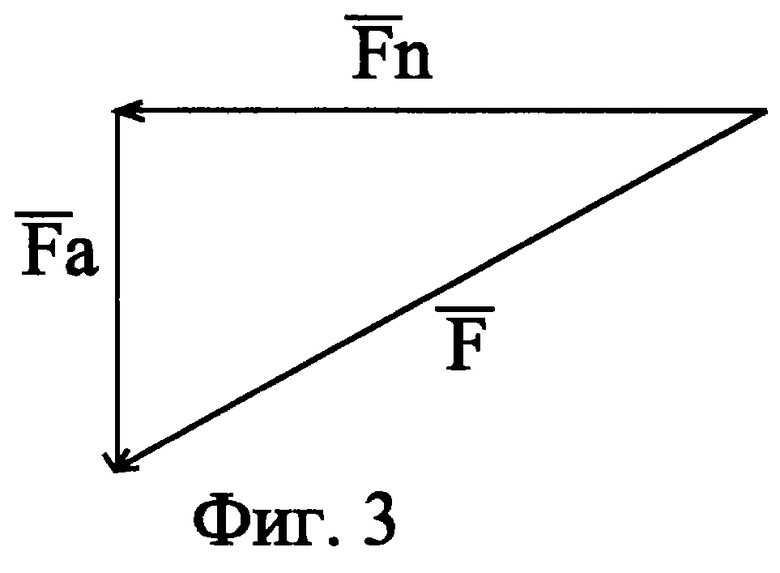
На фиг. 3 представлена схема разложения результирующего вектора тяги, создаваемого электроракетными двигателями, на составляющие вдоль осей тангажа и рыскания.
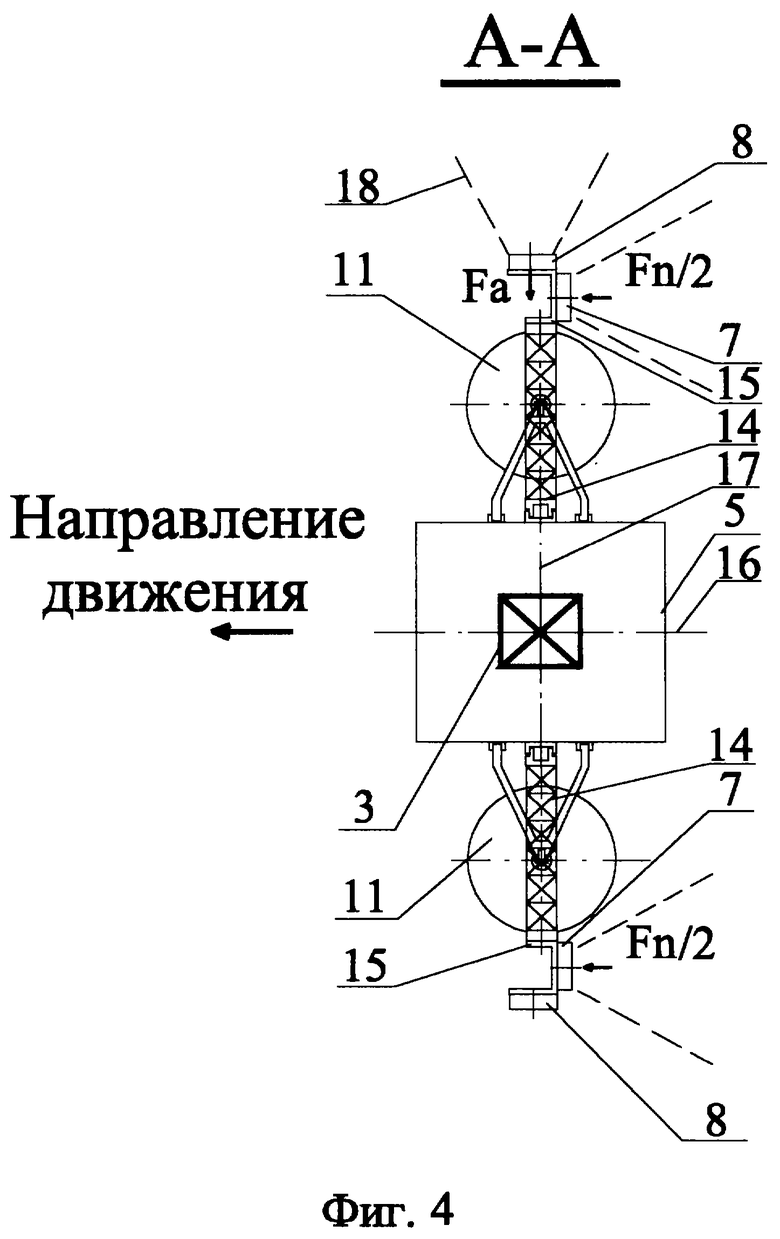
На фиг.4 представлен вариант сечения А-А по фиг.1.
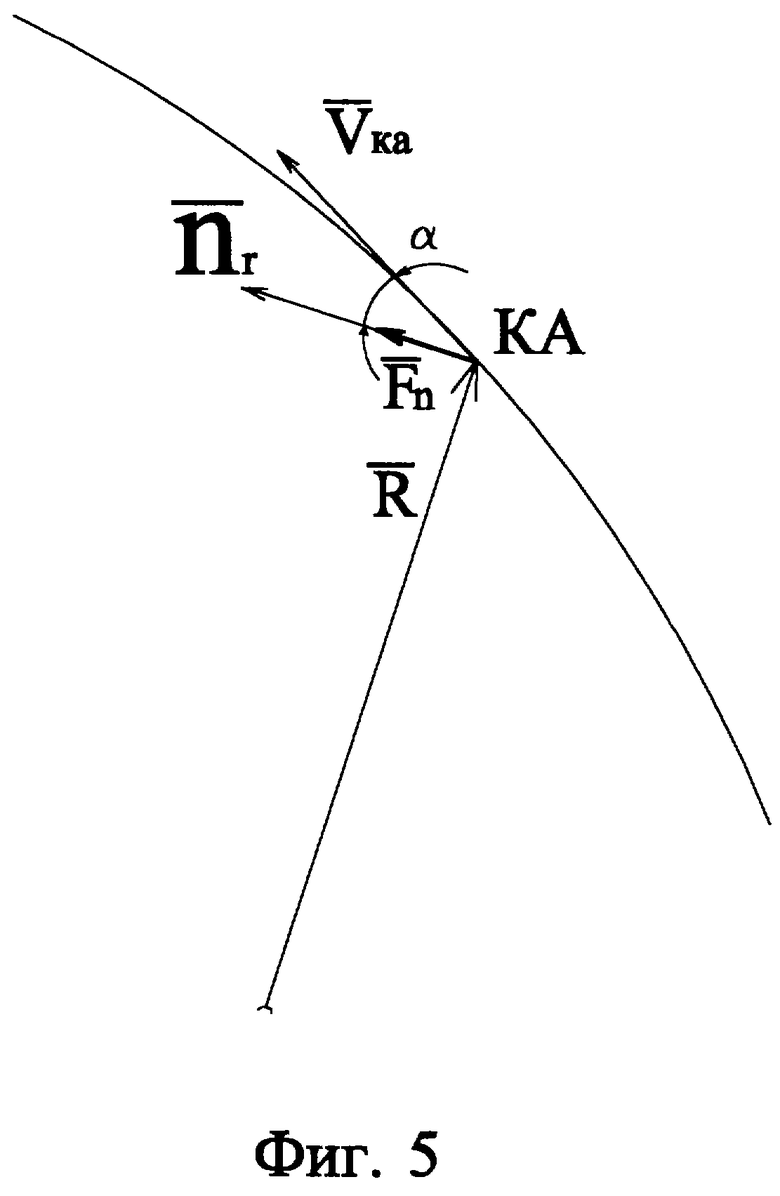
На фиг. 5 представлена схема управления вектором тяги электроракетных двигателей по углу тангажа.
В состав КА (см. фиг.1) входят: энергетический модуль 1 с солнечными батареями, имеющими двухстепенную систему наведения, 2, верхняя раздвижная ферма 3, силовая токоведущая шина 4, двигательный модуль 5, включающий в себя систему хранения и подачи рабочего тела 6 и электроракетные двигатели 7 и 8, нижняя раздвижная ферма 9, модуль полезной нагрузки 10 с антенно-фидерными устройствами 11 и механизмы раздвижения верхней 3 и нижней 9 ферм 12. Позицией 13 отмечена ось рыскания КА (продольная ось КА).
В состав двигательного модуля (см. фиг.4) могут входить откидные или раздвижные фермы 14 с поворотными платформами 15, имеющими степень свободы относительно оси крена 16 или оси тангажа 17, с расположенными на них электроракетными двигателями 7 и 8, создающими тягу вдоль осей крена и тангажа соответственно.
Кроме этого, по фиг.4 двигатели 8 могут отсутствовать, а двигательный модуль 5 может быть выполнен поворотным относительно оси рыскания 13.
Позицией 18 отмечена граница факела работающего электроракетного двигателя.
Предложенный аппарат работает следующим образом.
Аппарат доставляется на начальную переходную орбиту с помощью ракеты-носителя и разгонного блока на основе двигателя большой тяги. После этого происходит раздвижение верхней 3 и нижней 9 ферм с помощью механизмов раздвижения 12 так, чтобы центр масс всей системы находился в районе двигательного модуля 5, раскрытие и наведение на Солнце солнечных батарей 2 и аппарат приходит в состояние гравитационной стабилизации модулем полезной нагрузки 10 к Земле. Такое положение аппарата сохраняется в течение всего периода активного существования КА. После принятия гравитационной стабилизации и наведения солнечных батарей 2 на Солнце происходит включение электроракетных двигателей 7 и 8, тяга которых регулируется так, чтобы суммарный вектор тяги F (см. фиг. 3) имел заданное направление и величину, причем двигатели 7 обеспечивают составляющую тяги вдоль оси крена 16 (в плоскости орбиты) Fn (обеспечивает повышение или понижение высоты орбиты), а двигатели 8 составляющую вдоль оси тангажа 17 (нормальную к плоскости орбиты) Fa (обеспечивает изменение наклонение орбиты). Для пункта 1 по фиг.2 тяга двигателей 7 Fn направлена перпендикулярно текущему радиус-вектору КА (трансверсально) и составляет с вектором скорости КА некоторый угол α (см. фиг. 5), причем, чем он больше, тем меньше эффективность работающих двигателей 7. Поэтому в пунктах 2 и 3 по фиг.4 для устранения этого недостатка используется поворот на этот угол поворотной платформы 15. По пункту 3 для создания составляющей тяги, перпендикулярной текущей плоскости орбиты используется поворот двигательного модуля 5 с откидными (или раздвижными) фермами 14 и расположенными на них поворотными платформами 15 с электроракетными двигателями 7 на соответствующий угол вокруг оси рыскания 13. После выведения на рабочую орбиту раскрываются антенно-фидерные устройства 11, а электроракетные двигатели 7 и 8 используются для коррекции и поддержания заданной орбиты.
Таким образом достигается значительное уменьшение вредного влияния электроракетных двигателей на работу оборудования полезной нагрузки, снижается эрозионное воздействие факелов электроракетных двигателей на элементы конструкции КА, упрощается процесс управления вектором тяги, так что управление вектором тяги осуществляется практически без затрат рабочего тела и мощности, что ведет к снижению стоимости системы управления и позволяет реализовать оптимальные законы управления с минимальными затратами рабочего тела для осуществления довыведения КА на рабочую орбиту.
Литература
1. TDRS-H открывает новые возможности для передачи спутниковой информации, М. , ООО Информационно-издательский дом "Новости космонавтики", НК N8, 2000 г., с.31-34.
2. "Интерспутник" выбирает "Диалог", М., ООО Информационно-издательский дом "Новости космонавтики", НК N4, 2001 г., с.58-59.
3. Космические двигатели: состояние и перспективы, М., изд. "Мир", 1988 г., с.402-405.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОСМИЧЕСКАЯ ПЛАТФОРМА | 2016 |
|
RU2688630C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2711819C2 |
| Способ выведения на заданную межпланетную орбиту и многоразовый транспортно-энергетический модуль | 2018 |
|
RU2728180C2 |
| КОСМИЧЕСКАЯ ГОЛОВНАЯ ЧАСТЬ ДЛЯ ГРУППОВОГО ЗАПУСКА СПУТНИКОВ | 2010 |
|
RU2428358C1 |
| КОСМИЧЕСКИЙ АППАРАТ БЛОЧНО-МОДУЛЬНОГО ИСПОЛНЕНИЯ | 1995 |
|
RU2092398C1 |
| СИСТЕМА ВЫДАЧИ ИМПУЛЬСОВ ТЯГ | 2014 |
|
RU2560645C1 |
| КОСМИЧЕСКАЯ ПЛАТФОРМА | 2016 |
|
RU2648520C2 |
| Многоразовый транспортный воздушно-космический аппарат | 1979 |
|
SU862543A1 |
| Космический аппарат для очистки околоземного космического пространства от космического мусора | 2022 |
|
RU2784740C1 |
| ОРБИТАЛЬНАЯ КОСМИЧЕСКАЯ СИСТЕМА | 2011 |
|
RU2488527C1 |
Изобретение относится к области космической техники и может быть использовано для доставки спутников связи на геостационарную орбиту. Космический аппарат содержит энергетический модуль, двигательный модуль с электроракетными двигателями, модуль полезной нагрузки и раздвижные фермы, соединяющие двигательный модуль с модулем полезной нагрузки и энергетическим модулем. Электроракетные двигатели размещены на противоположных сторонах двигательного модуля. Электроракетные двигатели могут быть также размещены на поворотных относительно оси тангажа или крена платформах, установленных на откидных или раздвижных фермах. Двигательный модуль может быть выполнен поворотным относительно оси рыскания. Изобретение позволяет уменьшить вредное влияние двигателей на элементы космического аппарата, упростить процесс управления вектором тяги, снизить стоимость системы управления и уменьшить расход рабочего тела при довыведении космического аппарата на рабочую орбиту. 2 з.п.ф-лы, 5 ил.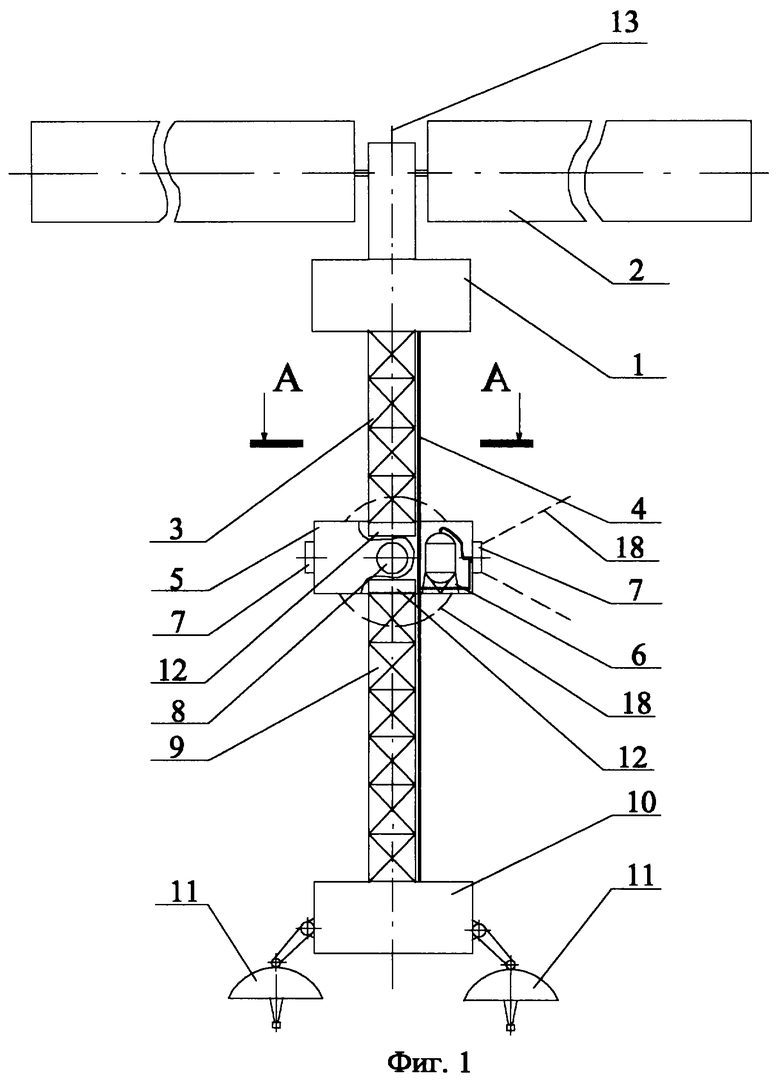
| Космические двигатели: состояние и перспективы | |||
| - М.: Мир, 1988, с.402-405 | |||
| RU 2001847 С1, 30.10.1993 | |||
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 1991 |
|
RU2021170C1 |
| US 4407469 А, 04.10.1983 | |||
| US 4585191 А, 29.04.1986. | |||

