Изобретение относится к области приводов кругового поступательного движения для лабораторных приборов, просеивающих сыпучие продукты, в качалках колб и пробирок, и других приборах и устройствах, использующих настольный динамически уравновешенный привод кругового поступательного движения, при размещении полезного груза над приводом.
Известен лабораторный рассев, содержащий ситовой пакет и привод кругового поступательного движения, включающий станину, установленный в подшипниках на станине ведущий кривошип, имеющий балансир, две пружины, связывающие платформу со станиной, два противовеса, жестко закрепленные на платформе, снижающие центр масс ситового пакета в плоскость колебаний центра масс балансира, электродвигателя и ременной передачи (1).
Недостатком этого устройства является пониженный к.п.д. и крутильные колебания при несимметричной нагрузке.
Наиболее близкими по технической сущности и достигаемому эффекту является привод кругового поступательного движения, включающий платформу с ситами, уравновешивание которого достигается за счет того, что платформа связана с шатуном, с помощью стоек, проходящих через окна в станине, а шатун через подшипники связан с тремя кривошипами, которые через подшипники связаны со станиной, и причем один из кривошипов приводится во вращение от электродвигателя, установленного на станине, и каждый кривошип имеет балансир. Уравновешивание сил инерции, возникающих при движении, осуществляется за счет того, что шатун выполняет функцию противовеса, приводящего центр масс в плоскость колебания центров масс балансиров [2].
Целью изобретения является упрощение конструкции и снижение материалоемкости при полном ее динамическом уравновешивании.
Приведение центра масс и платформы с полезным грузом в плоскость вращения центра масс балансира осуществляется за счет расположения контрбалансира на ведущем кривошипе, центр масс которого диаметрально противоположен центру масс балансира.
На чертеже показана принципиальная схема привода.
Привод состоит из платформы (1) с расположенным на ней полезным грузом (2), ведущего кривошипа (3), электродвигателя (4), станины (5) и ведомых кривошипов (6). На ведущем кривошипе расположен балансир (7) и контрбалансир (8).
Круговое поступательное движение платформы с расположенным на ней полезным грузом (1) осуществляется от электродвигателя, кинематически связанного с шарнирным механизмом, который включает в себя ведущий кривошип (3) и два ведомых кривошипа (6), соединенных через опоры вращения с платформой (1) и станиной (5).
Расчет системы уравновешивания ведется при соблюдении двух условий: равенства опрокидывающих моментов платформы с полезным грузом и контрбалансира относительно плоскости вращения центров масс балансира, то есть: M1•R1•H1= M2R2•Н2 и равенства статических моментов: M1•R1+М2•R2=Мб•Rб,
где M1 - масса платформы с полезным грузом;
R1 - радиус колебаний платформы;
H1 - высота между плоскостью колебаний центра масс платформы с полезным грузом и плоскостью вращения центра масс балансира;
М2 - масса контрбалансира;
R2 - радиус вращения центра масс контрбалансира;
Н2 - высота между плоскостью вращения центра масс противовеса и плоскостью вращения центра масс балансира;
Мб - масса балансира;
Rб - радиус вращения центра масс балансира.
Источники информации:
1. Производственная инструкция на лабораторный рассев типа MLT-300 фирмы Buhler.
2. Патент РФ 1829965.
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод кругового поступательного движения | 1990 |
|
SU1829965A3 |
| Рассев | 1984 |
|
SU1321485A1 |
| РУЧНОЙ ИНСТРУМЕНТ ДЛЯ РАСПИЛОВКИ ПРЕИМУЩЕСТВЕННО МЯСНЫХ ТУШ | 1996 |
|
RU2107438C1 |
| СТАНОК-КАЧАЛКА | 1997 |
|
RU2135832C1 |
| СТАНОК-КАЧАЛКА | 2004 |
|
RU2260713C1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ СТАНОК-КАЧАЛКА | 2003 |
|
RU2265138C2 |
| СТАНОК-КАЧАЛКА | 2010 |
|
RU2450161C2 |
| ДИФФЕРЕНЦИАЛЬНЫЙ КРИВОШИПНЫЙ МЕХАНИЗМ ПРИВОДА ШТАНГОВОГО СКВАЖИННОГО НАСОСА | 2002 |
|
RU2246650C2 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ В ПРОСТРАНСТВЕ, ПРЕОБРАЗУЮЩЕЕ КИНЕТИЧЕСКУЮ ЭНЕРГИЮ ВРАЩАЮЩЕГОСЯ ВАЛА В УПРАВЛЯЕМОЕ ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ | 2009 |
|
RU2416048C2 |
| ОРБИТАЛЬНЫЙ ШЕЙКЕР | 2024 |
|
RU2823279C1 |
Изобретение относится к области приводов кругового поступательного движения для лабораторных приборов, просеивающих сыпучие продукты, в качалках колб и пробирок и других приборах и устройствах, использующих настольный динамически уравновешенный привод кругового поступательного движения, при размещении полезного груза над приводом. Сущность изобретения заключается в системе уравновешивания привода кругового поступательного движения, содержащего платформу с полезным грузом, электродвигатель, кинематически связанный с ведущим кривошипом, который через опоры вращения установлен на станине и связан с платформой. На ведущем кривошипе расположены балансир и контрбалансир. Контрбалансир расположен таким образом, чтобы его центр масс находился в положении, диаметрально противоположном центру масс балансира. При этом для полного уравновешивания должно соблюдаться равенство опрокидывающих моментов платформы с полезным грузом и контрбалансира относительно плоскости вращения центра масс балансира и равенство суммы статических моментов платформы с полезным грузом и контрбалансира статическому моменту балансира. Технический результат - упрощение конструкции и снижение материалоемкости при полном ее динамическом уравновешивании. 1 ил.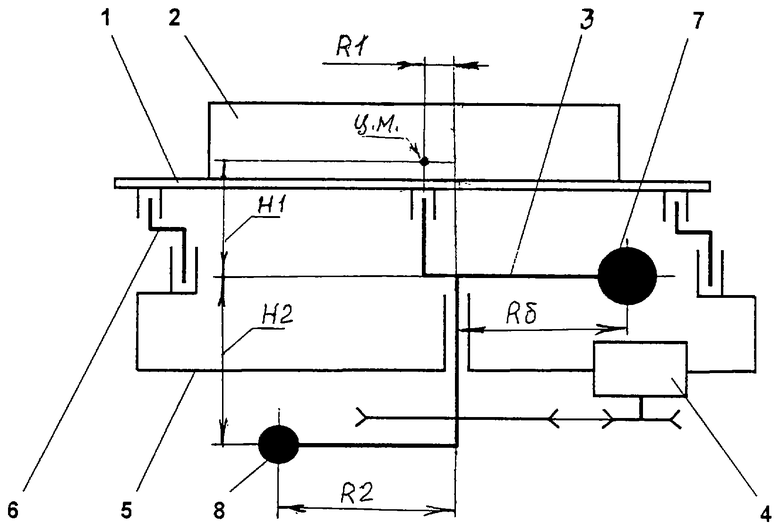
Привод кругового поступательного движения, содержащий платформу с полезным грузом, электродвигатель, кинематически связанный с ведущим кривошипом, который через опоры вращения установлен на станине и связан с платформой, совершающей при вращении ведущего кривошипа круговое поступательное движение за счет дополнительных устройств, причем на ведущем кривошипе расположен балансир, отличающийся тем, что на ведущем кривошипе расположен контрбалансир, который совместно с балансиром обеспечивает уравновешивание платформы с полезным грузом, при этом центр масс балансира и центры масс платформы с полезным грузом и контрбалансира расположены диаметрально противоположно относительно оси вращения ведущего кривошипа, в то же время центры масс платформы с полезным грузом и контрбалансира расположены по разные стороны от плоскости вращения центра масс балансира.
| Привод кругового поступательного движения | 1990 |
|
SU1829965A3 |
| Рассев | 1984 |
|
SU1321485A1 |
| Вибросито для классификации порошков абразивных материалов | 1986 |
|
SU1390876A1 |

