Изобретение относится к микробиологии, биотехнологии, молекулярной и клеточной биологии, биохимии, фармацевтике, медицинской практике, химии, а именно к приборам для смешивания и перемешивания жидких и порошкообразных ингредиентов в сосудах (химических стаканах, колбах, пробирках), установленных на платформе, в частности, для культивирования прокариотических и эукариотических клеток в микробиологии, для экстрагирования БАВ в биотехнологии, для культивирования биологических молекул, клеток, тканей и других биообъектов, для отмывания электрофоретического геля в генной инженерии для агглютинации и преципитации в биохимии, для проведения клинико-диагностических тестов в медицинской практике.
Механизмом действия орбитального шейкера является вращение платформы с расположенной на ней лабораторной посудой с перемешиваемыми веществами таким образом, что все точки на верхней поверхности платформы в плоскости XY движутся по круговой траектории, имеющей общий радиус (по орбите).
Мензурки, колбы и другие сосуды прикрепляют к верхней поверхности платформы таким образом, что содержащаяся в них жидкость циркулирует вокруг внутренних боковых стенок сосуда для увеличения смешивания и увеличения взаимодействия или обмена между жидкостью и газовой средой.
Использование орбитального шейкера гарантирует равномерность распределения ингредиентов и предотвращает образование осадка.
Известны и широко применяются орбитальные шейкеры с устройством, которое приводит платформу в орбитальное перемещение, включающим в себя один или несколько вертикальных валов, приводимых в движение двигателем с кривошипно-шатунным механизмом так, что ось верхнего вала перемещается по кругу радиусом, который определяется «ходом кривошипа».
Платформа с нагрузкой, состоящей из заполненных колб или сосудов, перемещаются со скорость вращения ведомого вала по окружности радиусом, равным ходу кривошипа. Масса жидкости внутри сосудов перемещается со скоростью вращения вала по кругу с радиусом, равным ходу кривошипа плюс расстояние от центра сосуда до центра массы жидкости, содержащейся в сосуде.
При этом может возникать вибрация платформы, что нежелательно. Чтобы уменьшить вибрацию, массу невращающейся опорной конструкции шейкера увеличивают. Это приводит к нежелательному эффекту увеличения общего веса шейкера.
Для компенсации сил, создаваемых вращающейся по орбите массой, используют противовесы определенной массы и положения, как по вертикали, так и по радиусу, которые изменяются в зависимости от условий нагрузки на платформу. Для статической и динамической компенсации больших дисбалансов масс такие устройства требуют значительного пространства для размещения корректирующих грузов в соответствующих местах относительно нагрузки платформы, а также увеличивают общий вес продукта.
Для решения указанных проблем, например, используют орбитальный шейкер [EP2714253,2014-04-09, B01F11/00] с возможностью автоматической регулировки хода эксцентрика и одновременной регулировки компенсирующих противовесов. Однако в указанном решении есть проблемы связанные с высокой потребляемой мощностью и уровнем шума и вибраций.
Из области техники известен орбитального платформенный шейкер Вилитек ШВВ-01 для смешивания фармацевтических субстанций и реагентов с асинхронным двигателем. За счет использования асинхронного двигателя достигается уменьшение вибраций и уровня шума, уменьшение потребляемой мощности.
Следует отметить, что все известные решения, представленные в открытых патентных базах относятся к платформенным орбитальным шейкерам и представляют общий уровень техники в указанной области.
В качестве прототипа выбран лабораторный орбитальный шейкер Института биологического приборостроения с опытным производством РАН, г. Пущино, с маятниковой подвеской платформы [https://www.ibp-ran.ru/shop/sheykery/sheyker_orbitalniy_s_mayatnikovoy_podveskoy_platformy#product-description], предназначенный для встряхивания 64-х плоскодонных колб Эрленмейера или качалочных круглодонных колб вместимостью 700 -750 мл при комнатной температуре. Шейкер рассчитан на загрузку до 30 кг. Рама выполнена из нержавеющей стали, чтобы придать шейкеру устойчивость. Конструкция шейкера позволяет наблюдать за встряхиванием колб, зафиксированных в гнездах, и контролировать частоту колебаний стола с помощью цифрового индикатора.
Асинхронный электродвигатель обеспечивает с помощью ременной передачи практически бесшумные круговые (орбитальные) движения рабочей платформы с закреплёнными на ней колбами в горизонтальной плоскости с плавно регулируемой частотой. Для гашения колебаний вала двигателя используют шкиф с вырезом для противовеса, что может способствовать дисбалансу из-за вибрации.
Недостатки прототипа: большая масса шейкера, высокая потребляемая мощность; относительно высокий уровень шума и вибраций; относительно низкая общая надежность.
Задача настоящего изобретения – создание орбитального шейкера, в котором устранены проблемы аналогов.
Предложено техническое решение, позволяющее снизить общую массу шейкера, уменьшить потребляемую мощность, снизить уровень шума и вибраций при различной загрузке платформы шейкера, повысить общую надежность, за счет меньшего количества элементов в конструкции, а также минимизировать микробное загрязнение рабочей поверхности платформы.
Технический результат – компактный, лёгкий, надёжный и высокопроизводительный орбитальный шейкер, который позволяет:
• существенно снизить потребляемую мощность, уровень шума и вибрации при различной загрузке платформы шейкера,
• исключить микробное загрязнение рабочей поверхности платформы при соприкосновении с микроорганизмами.
Согласно изобретению, орбитальный шейкер содержит раму, которая закреплена жестко в двух плоскостях, горизонтальной и вертикальной, платформу на маятниковой подвеске с креплениями для сосудов, синхронный двигатель с управляемой частотой вращения для приведения в орбитальное движение платформы и груз для обеспечения орбитального движения, платформы.
Согласно изобретению, платформа выполнена из композиционного материала на основе полипропилена, модифицированного наноразмерным металлическим наполнителем с бактериальными свойствами.
Согласно изобретению, платформа выполнена одно- или двухъярусной с возможностью загрузки 50 кг материала и более.
Согласно изобретению, четыре гибких угловых подвеса платформы закреплены на раме таким образом, что горизонтальное отклонение платформы относительно рамы составляет не более 5 мм/1500 мм и все подвесы платформы имеют одинаковое натяжение,
Согласно изобретению, двигатель для приведения в движение платформы жестко закреплен под платформой по центру.
Согласно изобретению, груз расположен на штанге, закрепленной на валу двигателя под углом к оси вращения двигателя, с возможностью изменения массы груза и расстояния от центра тяжести груза до оси вращения двигателя.
Угол между осью вращения двигателя и штангой может варьироваться в пределах ограниченных элементами конструкции шейкера, как правило, он составляет около 90 °.
Конструкция штанги позволяет изменять в зависимости от загрузки шейкера массу груза и расстояние от центра тяжести груза до оси вращения двигателя.
Согласно изобретению, рама выполнена из дюралюминия.
Согласно изобретению, платформа выполнена из композиционного материала на основе полипропилена, модифицированного наночастицами серебра (Ag, коллоидное серебро, кластерное серебро), меди (Cu), диоксида кремния (SiO2), диоксида титана (TiO2 ) или оксида цинка (ZnO).
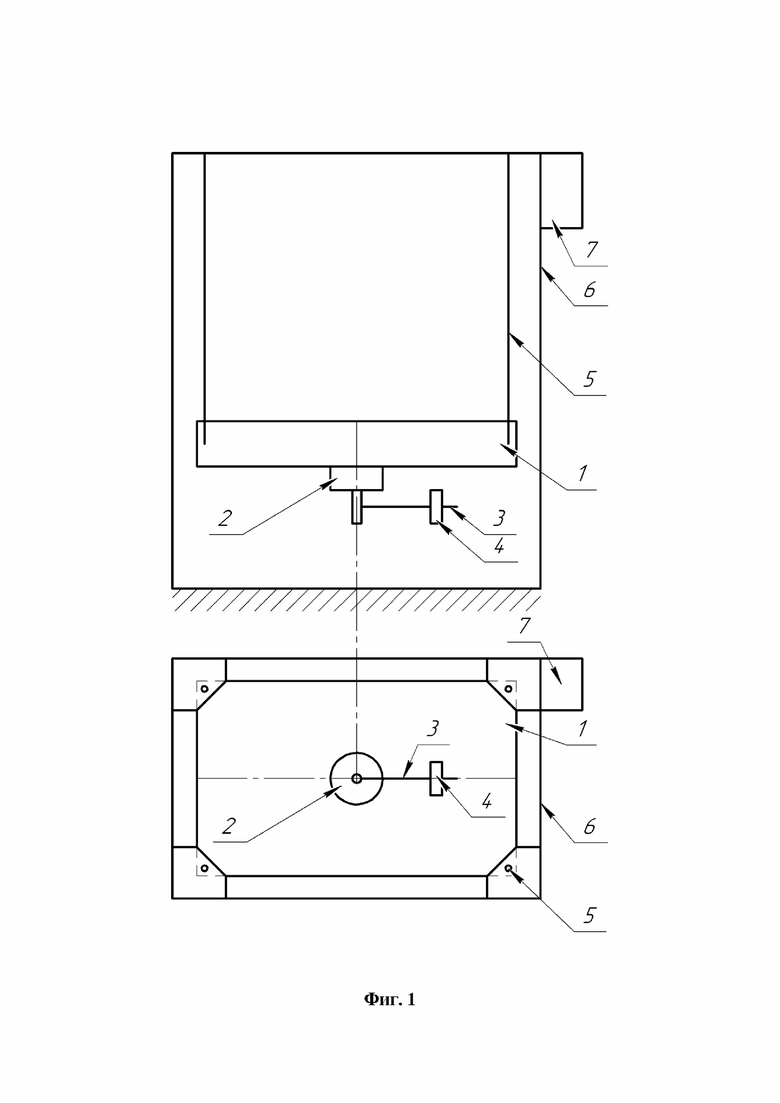
На фиг. 1 схематично показан орбитальный шейкер, где: 1 – стол (платформа) с адаптером для пробирок; 2 – двигатель; 3 – штанга; 4 – груз; 5 – подвес (трос); 6 – рама; 7 – блок управления; Масса груза и расстояние от груза до оси вращения изменяются в зависимости от загрузки шейкера.
Орбитальный шейкер состоит из рамы 6, на которую с помощью четырёх гибких подвесов 5 расположенных по углам рамы, подвешен стол 1 содержащий адаптеры для крепления плоскодонных колб. За счет использования гибких подвесов для крепления платформы, вибрация не передается на раму в широком диапазоне спектра частот.
Рама представляет собой жесткий каркас, выполненный в форме параллелепипеда из пластика или металла, например, дюралюминия, имеющего малый вес и высокую прочность, например, дюралюминия, удельный вес которого составляет 2,8 г/см3, а прочность – до 500 МПа.
Платформа подвешена во внутреннем объёме рамы на гибких подвесах. Платформа может быть выполнена одно- или двухъярусной и рассчитана на загрузку 50 кг и более материала. Платформа выполнена из композиционного материала на основе обладающего бактерицидными свойствами (антибактериальными и фунгицидными) полипропилена, модифицированного наночастицами серебра (Ag, коллоидное серебро, кластерное серебро), меди (Cu), диоксида кремния (SiO2), диоксида титана (TiO2 ) или оксида цинка (ZnO). В сравнении с органическими антибактериальными средствами нанокристаллические оксиды металлов обладают большей долговечностью, меньшей токсичностью, лучшей избирательностью и термостойкостью. Например, композиционный материал на основе полипропилена, модифицированного наноразмерным медьсодержащим порошком исследован в работе [А.Л. Чуловская, Е.В. Гарасько, Т.П. Кравченко Композиционный материал на основе полипропилена с биоцидными свойствами. Успехи в химии и химической технологии. Том XXVII. 2013. №3 115]. В работе [Дышлюк Л.С. Теоретическое обоснование и практическая реализация технологий получения антимикробных пленок на основе полисахаридов и их производных для пищевой промышленности. Диссертация на соискание ученой степени доктора технических наук. КемГУ. 2020] выполнены исследования бактерицидных свойств композиционных материалов на основе полипропилена, модифицированных наночастицами серебра (Ag, коллоидное серебро, кластерное серебро), меди (Cu), диоксида кремния (SiO2), диоксида титана (TiO2) и оксида цинка (ZnO), подтверждающие их эффективности.
Блок управления 7 закреплен в верхнем углу рамы 6. На блоке управления 7 расположены: колесо регулятора оборотов и сетевой тумблер (на Фиг.1 не показаны).
Двигатель 2 для приведения в движение платформы 1 жестко закреплен под платформой по центру. Груз 4 установлен на штанге 3, второй конец которой жестко закреплен на валу двигателя. Угол между осью вращения двигателя и штангой, как правило, составляет около 90°, но может и варьироваться в пределах ограниченных элементами конструкции шейкера.
Конструкция штанги 3 позволяет изменять в зависимости от загрузки шейкера массу груза 4 и расстояние от центра тяжести груза до оси вращения двигателя.
Вращающаяся штанга с грузом является источником управляемого дисбаланса массы при вращении, который заставляет платформу совершать орбитальное движение. Уравновешивание инерционных сил при вращении штанги с грузом происходит естественным путём гравитационными силами.
Орбитальный шейкер предназначен для взбалтывания, встряхивания и перемешивания любых жидкостей и растворов в колбах (ГОСТ 25336), например, объёмом от 500 до 1000 мл, плотно размещенных внутри адаптеров пробирок на рабочей поверхности платформы.
Перед началом эксплуатации раму шейкера жёстко закрепляют в шести точках: в четырёх– к полу и в двух– к стене в верхней части рамы. Таким образом, достигается устойчивость шейкера. Четыре подвеса платформы закрепляют на раме таким образом, чтобы горизонтальное отклонение платформы относительно рамы составляло не более 5 мм/1500 мм, и все подвесы платформы имели одинаковое натяжение. Затем устанавливают колбы с раствором в адаптеры пробирок стола. При неполной загрузке колбы на столе распределяют равномерно.
Включают шейкер и устанавливают необходимую частоту вращения электродвигателя. При необходимости, изменение оборотов (частоты вращения электродвигателя) во время работы шейкера выполняют вращением колеса регулятора оборотов блока управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Космический аппарат для доставки полезного груза на космическое тело с малым гравитационным полем | 2020 |
|
RU2758656C1 |
| РОЛЛЕР ДЛЯ КУЛЬТИВИРОВАНИЯ | 2022 |
|
RU2820199C1 |
| Привод скважинного штангового насоса | 1989 |
|
SU1731988A1 |
| СПОСОБ МОДЕЛИРОВАНИЯ ЗАПАДНОГО ДРЕЙФА ТВЕРДОГО ЯДРА ПЛАНЕТЫ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2251662C2 |
| СПОСОБ ПОЛУЧЕНИЯ ПОЛИМЕРНЫХ КОМПОЗИЦИОННЫХ МАТЕРИАЛОВ С НАНОНАПОЛНИТЕЛЯМИ И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2540314C1 |
| ДИНАМИЧЕСКИЙ ИСПЫТАТЕЛЬНЫЙ СТЕНД | 2014 |
|
RU2554198C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО С РЕГУЛИРУЕМОЙ В ЗАВИСИМОСТИ ОТ ПОЛОЖЕНИЯ ЦЕНТРА МАСС ГРУЗА ТОЧКОЙ ПОДВЕСА | 2007 |
|
RU2344986C1 |
| СПОСОБ ОТРАБОТКИ СИСТЕМ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ КОСМИЧЕСКИХ АППАРАТОВ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2001 |
|
RU2207309C2 |
| Интегрирующий акселерометр | 1978 |
|
SU794540A1 |
| ГРУЗОВАЯ ПЛАТФОРМА | 1998 |
|
RU2141420C1 |
Изобретение относится к микробиологии, биотехнологии, молекулярной и клеточной биологии, биохимии, фармацевтике, медицинской практике, а именно к приборам для смешивания и перемешивания жидких и порошкообразных ингредиентов в сосудах, установленных на платформе. Орбитальный шейкер содержит раму, жестко закрепленную в двух плоскостях, платформу из композиционного материала на основе полипропилена, модифицированного наноразмерным металлическим наполнителем с бактериальными свойствами, на маятниковой подвеске с креплениями для сосудов, синхронный двигатель с управляемой частотой вращения и груз для обеспечения орбитального движения, платформы, установленный на штанге, жестко закрепленной на валу двигателя. Конструкция штанги позволяет изменять в зависимости от загрузки шейкера массу груза и расстояние от центра тяжести груза до оси вращения двигателя. Технический результат - компактный, легкий, надежный и высокопроизводительный орбитальный шейкер, который позволяет существенно снизить потребляемую мощность, уровень шума и вибрации при различной загрузке платформы шейкера, а также исключить микробное загрязнение рабочей поверхности платформы при соприкосновении с микроорганизмами. 5 з.п. ф-лы, 1 ил.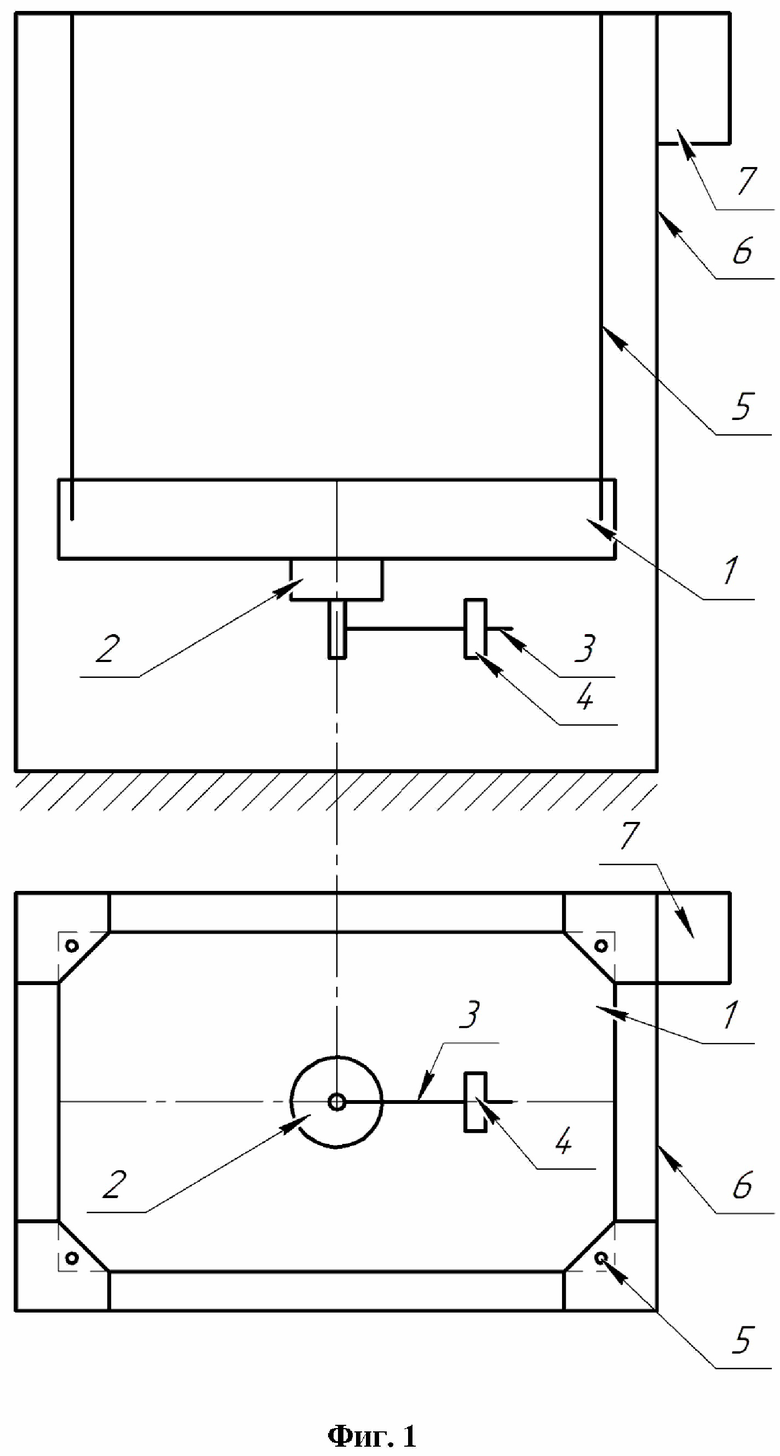
1. Орбитальный шейкер, содержащий раму, платформу с маятниковой подвеской и с креплениями для сосудов, двигатель для приведения в орбитальное движение платформы, груз для обеспечения орбитального движения, платформы, отличающийся тем, что рама закреплена жестко в двух плоскостях, горизонтальной и вертикальной, платформа из композиционного материала на основе полипропилена, модифицированного наноразмерным металлическим наполнителем с бактерицидными свойствами, выполнена одно- или двухъярусной с возможностью загрузки 50 кг материала и более, четыре гибких угловых подвеса платформы имеют одинаковое натяжение, двигатель для приведения в движение платформы жестко закреплен под платформой по центру, груз расположен на штанге, закрепленной на валу двигателя под углом к оси вращения двигателя, с возможностью изменения массы груза, расстояния от центра тяжести груза до оси вращения двигателя, а также угла наклона штанги к оси вращения двигателя.
2. Орбитальный шейкер по п. 1, отличающийся тем, что в качестве двигателя используют синхронный электродвигатель с управляемой частотой вращения.
3. Орбитальный шейкер по п. 1, отличающийся тем, что рама выполнена из дюралюминия.
4. Орбитальный шейкер по п. 1, отличающийся тем, что платформа выполнена из композиционного материала на основе полипропилена, модифицированного наночастицами серебра - Ag, коллоидное серебро, кластерное серебро; меди (Cu); диоксида кремния (SiO2); диоксида титана (TiO2) или оксида цинка (ZnO).
5. Орбитальный шейкер по п. 1, отличающийся тем, что четыре гибких угловых подвеса платформы закреплены на раме таким образом, что горизонтальное отклонение платформы относительно рамы составляет не более 5 мм/1500 мм.
6. Орбитальный шейкер по п. 1, отличающийся тем, что штанга закреплена на валу двигателя под углом 90° к оси вращения двигателя.
| УСТРОЙСТВО ИНТЕНСИВНОЙ ВИБРАЦИИ ПРОБИРОК, СОДЕРЖАЩИХ ПОДЛЕЖАЩИЕ ОБРАБОТКЕ ОБРАЗЦЫ | 2003 |
|
RU2325946C2 |
| Устройство для смешивания жидкостей в цилиндрических сосудах | 1987 |
|
SU1489817A1 |
| 0 |
|
SU206888A1 | |
| US 6579002 B1, 17.06.2003 | |||
| CN 212942549 U, 13.04.2021. | |||

