Изобретение относится к средствам, преобразующим для перемещения в пространстве кинетическую энергию вала вращения в поступательное движение устройства путем использования сил инерции массы груза, вращающегося вместе с валом. Такие устройства способны передвигаться по поверхности различных сред, в воде и в космосе.
Из уровня техники известны различные технические решения, в которых описаны устройства, преобразующие один вид энергии в другой. Известны устройства, когда энергия одного вида преобразуется в поступательное движение корпуса самого устройства. Так, например, известен патент, в котором описан способ и устройство преобразования энергии ветра в электроэнергию путем вращения вала мобильного генератора. Вырабатываемая при этом электроэнергия используется для передвижения платформы [1].
Сравнительно недавно стали известны технические решения, в которых энергия вращающегося вала преобразовывается в поступательное движение устройства путем использования сил инерции массы груза, вращающегося вместе с валом. Причем эти устройства для перемещения в пространстве могут быть выполнены в различной форме и в виде: транспортного средства на колесах, на поверхностях скольжения, в виде летающей тарелки и т.п.
Большой вклад по использованию кинетической энергии вала вращения колесных транспортных средств путем применения инерционных аккумуляторов энергии внес Нурбей Гулиа [2].
Ученый и изобретатель Кардановский В.А. в 2003 году закончил работу над инерционным двигателем, который составляет одно общее устройство с аппаратом для перемещения в воздухе и космосе, выполненным в виде летающей тарелки [3].
Наиболее близким к заявленному изобретению и принятому за прототип является так называемый инерцоид Толчина [4]. Это устройство содержит в корпусе устройства вал вращения, на котором жестко закреплен стержень с неподвижным грузом и приспособление, передающее энергию вращающегося рычага с грузом на пульсатор. Последний, в свою очередь, прикреплен к корпусу устройства через гибкую связь в виде пружины. При вращении энергия вращающегося вала и укрепленных на нем рычага и груза передается импульсами корпусу устройства через пульсатор и гибкую связь в виде пружины. К корпусу присоединены колеса, в результате чего при вращении вала происходит неравномерное поступательное передвижение устройства.
Устройство представляет довольно сложную конструкцию, движется рывками и имеет малый коэффициент преобразования энергии вращающегося вала в поступательное движение устройства. В этой связи была поставлена техническая задача - разработать и создать устройство, в котором бы решалась задача преобразования энергии вращающегося вала устройства в его поступательное движение плавно, с более простым конструктивным решением и с большим эффектом преобразования одного вида энергии в другой. Кроме того, ставилась задача поступательное движение сделать управляемым.
Решение этой технической задачи отражено в заявляемом изобретении «Устройство для перемещения в пространстве, преобразующее кинетическую энергию вращающегося вала в управляемое поступательное движение».
Сущность заявляемого устройства представлена на графических материалах и фотографиях. На фиг.1 представлен общий вид устройства для перемещения в пространстве; на фиг.2 - схема работы взаимосвязанных частей устройства; на фиг.3 - кинематическая схема работы устройства; на фиг.4 - схема сил, действующих на пульсатор во время работы устройства; на фиг.5 - схема сил, действующих на груз и вал вращения устройства; на фиг.6 - положение векторов сил в пространстве, действующих на груз и вал вращения устройства; на фиг.7 - диаграмма изменения коэффициента преобразования силы, действующей на корпус устройства; на фиг 8 - схема изменения сил, действующих на вал вращения устройства; на фиг.9 - диаграмма изменения коэффициента преобразования при малых значениях угла отклонения гибкой связи; на фиг.10 - схема сил в системе координат, действующих на устройство; на фиг.11 - схема изменения соотношения сил, действующих на корпус устройства; на фиг.12 - диаграмма изменения силы тяги от угловой скорости вала вращения устройства; на фиг.13 - эпюра центробежной силы Fu, действующей на устройство во время работы; на фиг.14 - схема возможного уравновешивания боковых составляющих центробежной силы Fu устройства с двумя параллельными валами разнонаправленного вращения; на фиг.15 - схема возможного уравновешивания боковых составляющих центробежной силы Fu устройства с двумя параллельными рычагами вращения; на фиг.16 - схема уравновешивания действия продольных центробежных сил устройства; на фиг.17 - схема возможного уравновешивания продольных центробежных сил устройства двумя гибкими связями; на фиг.18 - схема ограничения движения груза (ml) при малых оборотах (w<wmin); на фиг.19 - общий вид действующей модели устройства с горизонтально вращающимся грузом (массой); на фиг.20 - общий вид действующей модели устройства с вертикально вращающимся грузом (массой); на фиг.21 - действующая модель устройства с горизонтально вращающимся грузом (массой) на безопорной платформе; на фиг.22 - действующая модель устройства с вертикально вращающимся грузом (массой) на колесно-лыжной опоре; на фиг.23 - действующая модель устройства с вертикально вращающимся грузом (массой).
Представленное на фиг.1 устройство для перемещения в пространстве содержит корпус 1 с размещенным в нем валом вращения 2, рычаг 3, жестко закрепленный на валу вращения 2, груз 4, свободно перемещающийся в прорези 5 рычага 3, ведомая шестерня 6, жестко посаженная на ось вращения 7, которая расположена в корпусе 1, управляемая пластина 8, один конец которой жестко укреплен на оси вращения 7 ведомой шестерни 6, а другой - на пульсаторе 9. Ведомая шестерня 6 входит в зацепление с ведущей шестерней 10, ось вращения 11 которой одним концом расположена в корпусе 1, а другим - жестко связана с рукояткой 12, подпружиненной пружиной 13. Кроме того, ведущая шестерня 10 имеет плоскость 14, в которой одним концом укреплена пружина 13, подпирающая другим своим концом рукоятку 12. Последняя перемещается по фиксатору 15 с возможностью фиксации в каком-либо положении. На конце рукоятки 12 укреплена ручка 16. Вал вращения 2, груз 4 и пульсатор 9 имеют выточки соответственно 17, 18 и 19, в которых размещается гибкая связь 20. Выточки 17, 18 и 19 расположены в одной плоскости, а оси вращения вала вращения 2, груза 4 и пульсатора 9 - параллельно.
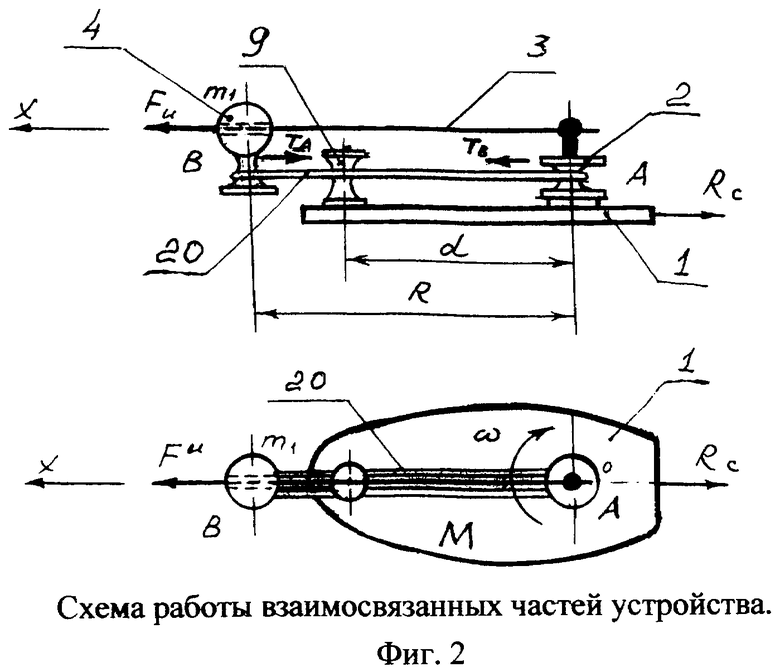
Представленная на фиг.2 схема работы взаимосвязанных частей устройства раскрывает процесс преобразования кинетической энергии вала вращения 2 в поступательное движение корпуса 3 установки.
Представленная на фиг.3 кинематическая схема работы устройства обосновывает процесс преобразования кинетической энергии вала вращения 2 установки в поступательное движение корпуса 1.
Представленная на фиг.4 схема сил, действующих на пульсатор во время работы устройства, показывает, какие силы действуют на пульсатор во время работы устройства.
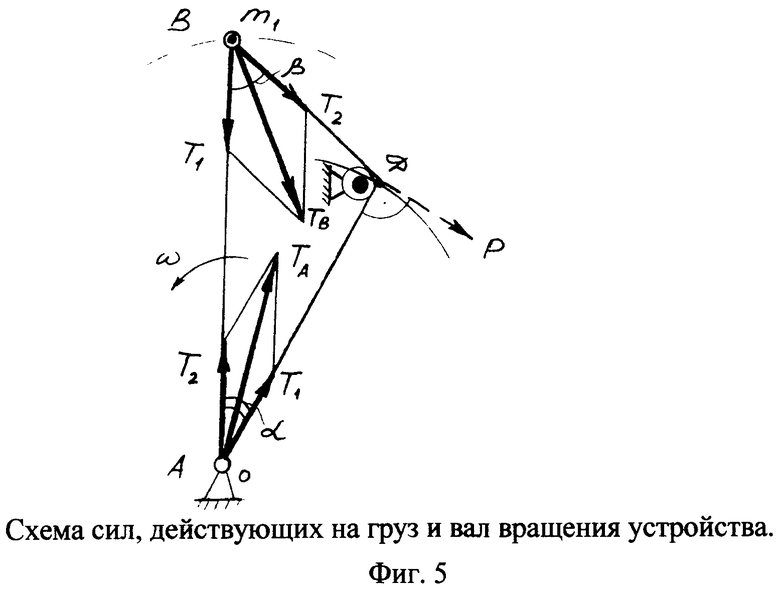
Представленная на фиг.5 схема сил, действующих на груз и вал вращения устройства, показывает, какие силы действуют на груз и вал вращения во время работы устройства.
Представленная на фиг.6 схема показывает положение векторов сил в пространстве, действующих на груз и вал вращения устройства.
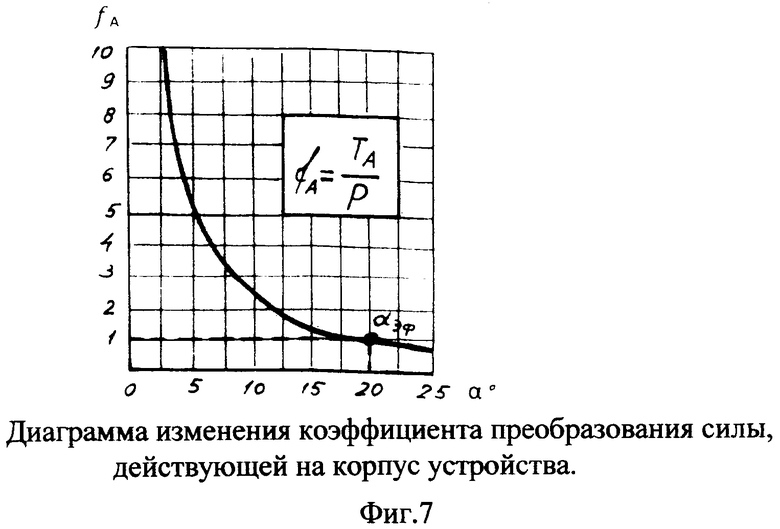
Представленная на фиг.7 диаграмма изменения коэффициента преобразования силы, действующей на корпус устройства, показывает изменение значения коэффициента преобразования fA в зависимости от значения угла α.
На фиг.8 представлена схема изменения сил, действующих на вал вращения устройства во время его работы.
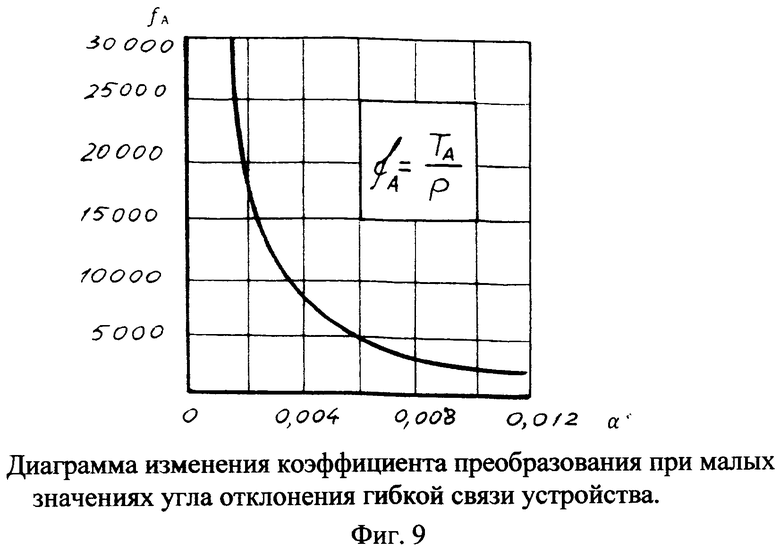
На фиг.9 представлена диаграмма изменения коэффициента преобразования при малых значениях угла отклонения гибкой связи устройства.
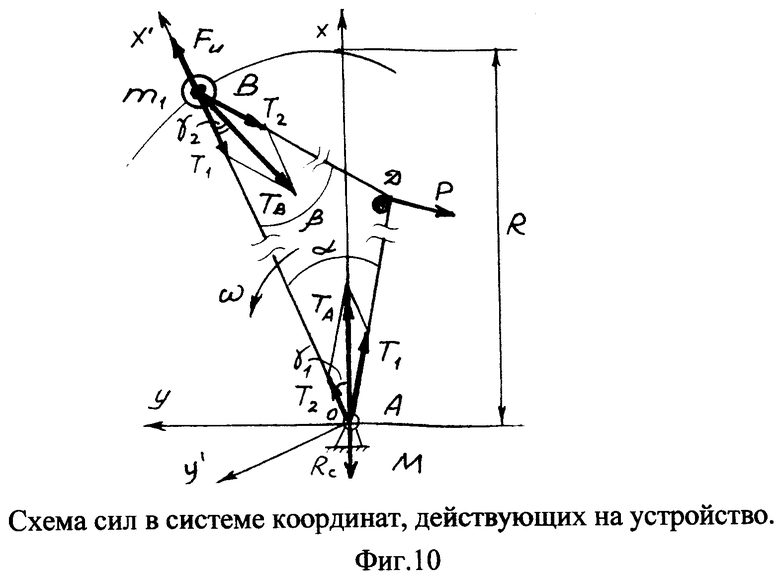
На фиг.10 представлена схема сил в системе координат, действующих на устройство.
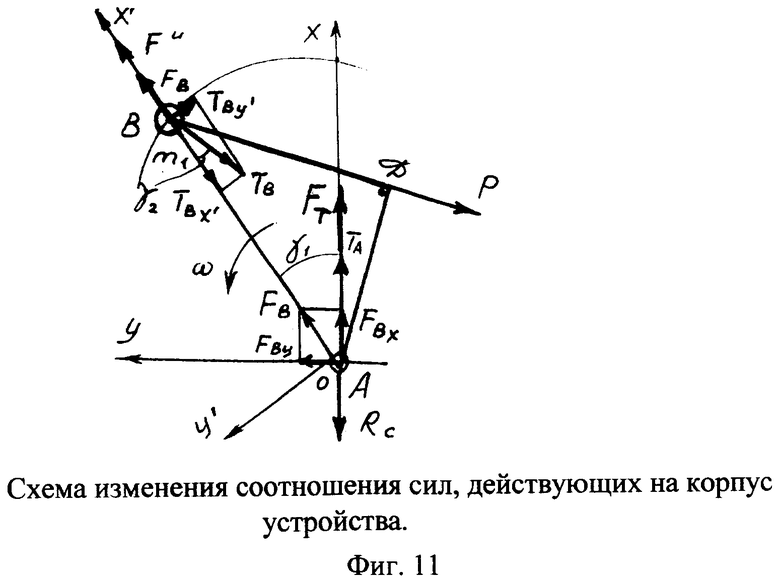
На фиг.11 представлена схема изменения соотношения сил, действующих на корпус устройства, в зависимости от изменения угловой скорости вращения рычага.
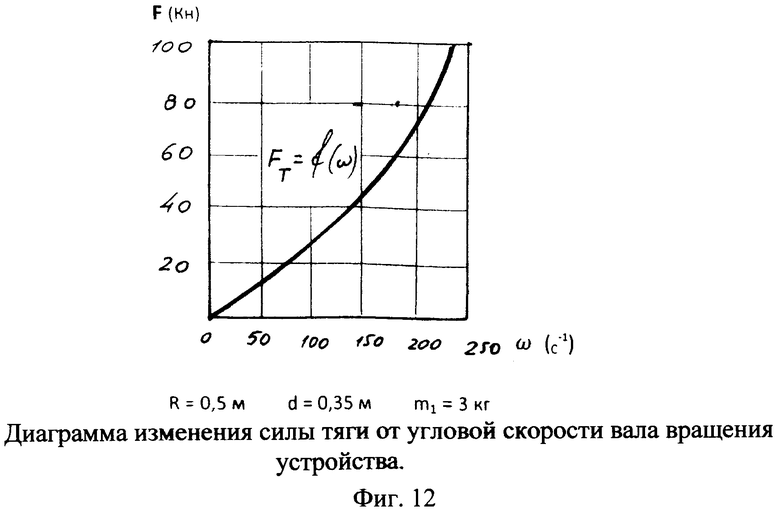
На фиг.12 представлена диаграмма изменения силы тяги от угловой скорости вала вращения устройства.
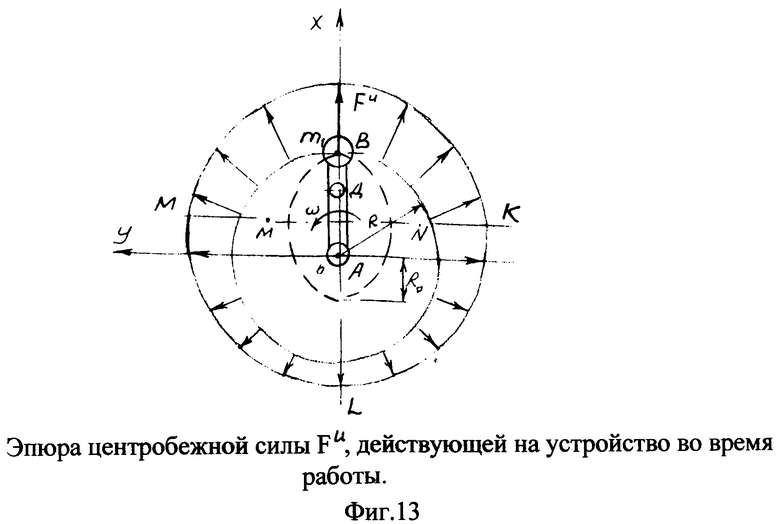
На фиг.13 представлена эпюра центробежной силы Fи, действующей на устройство во время работы.
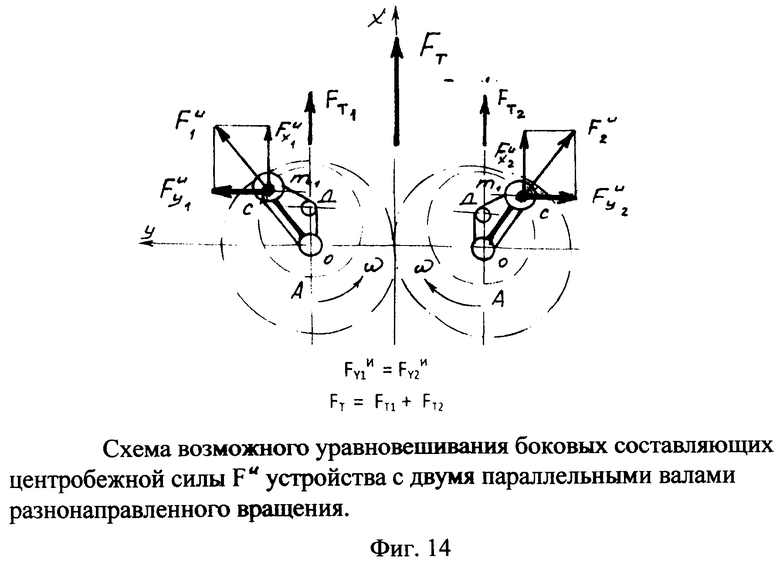
На фиг.14. представлена схема возможного уравновешивания боковых составляющих центробежной силы Fи устройства, если в нем разместить не один, а два параллельных вала разнонаправленного вращения со своими грузами, пульсаторами и гибкими связями.
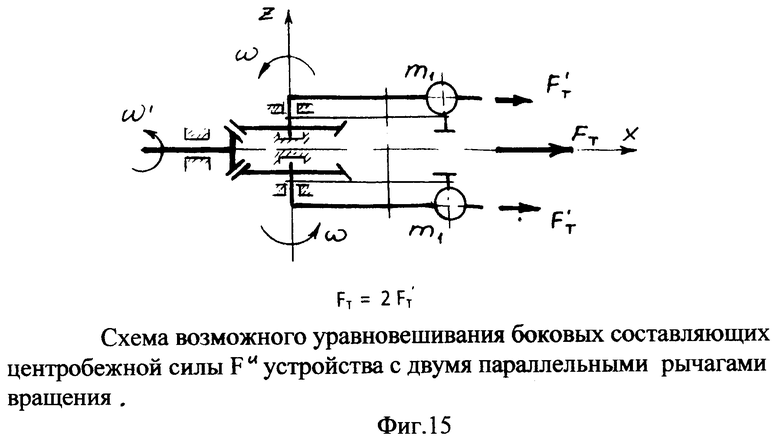
На фиг.15 представлена схема возможного уравновешивания боковых составляющих центробежной силы F устройства с двумя параллельными рычагами вращения, приводимыми в движение от одного вала вращения.
На фиг.16 представлена схема уравновешивания действия продольных центробежных сил устройства.
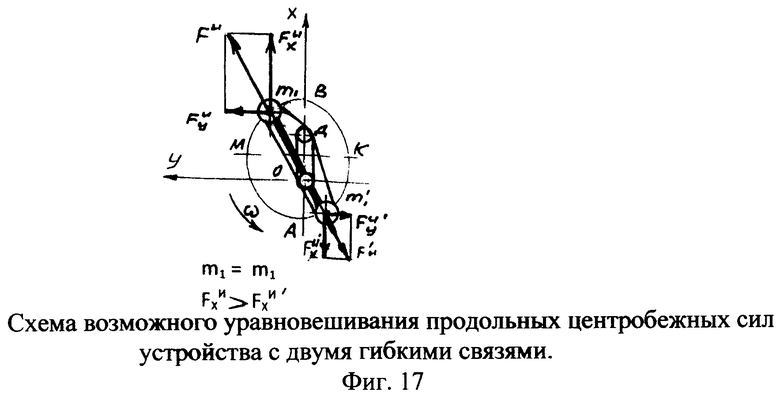
На фиг.17 представлена схема возможного уравновешивания продольных центробежных сил устройства с двумя гибкими связями.
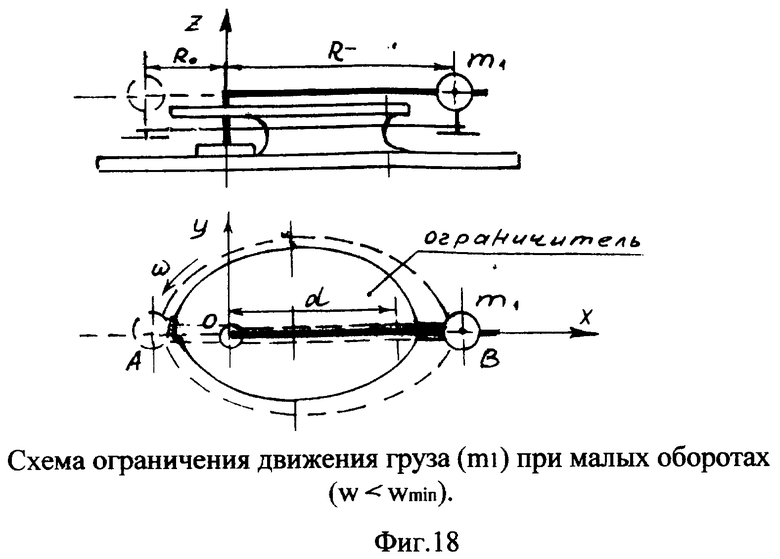
На фиг.18 представлена схема ограничения движения груза (m1) при малых оборотах (W<Wmin).
На фиг.19 представлен общий вид действующей модели устройства с горизонтально вращающимся грузом (массой).
На фиг.20 представлен общий вид действующей модели устройства с вертикально вращающимся грузом (массой).
На фиг 21 представлена действующая модель устройства с горизонтально вращающимся грузом (массой) на безопорной платформе.
На фиг.22 представлена действующая модель устройства с вертикально вращающимся грузом (массой) на колесно-лыжной опоре.
На фиг.23 представлена действующая модель устройства с вертикально вращающимся грузом (массой) с закрытым корпусом.
Устройство для перемещения в пространстве, преобразующее кинетическую энергию вращающегося вала в управляемое поступательное движение, работает следующим образом. Каким-либо образом (в заявленном изобретении не раскрывается) придают вращение валу 2 устройства (фиг.1), размещенному в корпусе 1. При этом в качестве двигателей для вращения вала 2 могут использоваться как механизмы с устройствами внутреннего сгорания, так и работающие на ядерном топливе или от аккумуляторов, аккумулирующих энергию от солнечных батарей, и другие. Синхронно с валом вращения 2 вращается рычаг 3 с грузом 4. Последний свободно перемещается в прорези 5 рычага 3. Вал вращения 2, груз 4 массой ml и пульсатор 9 по выточкам соответственно 17, 18 и 19 охватывает с натягом гибкая связь 20, которая при вращении вала 2 передает импульсы силы от вращающегося груза 4 пульсатору 9 (фиг.2) и далее через рычаг 3, вал вращения 2 корпусу 1. При этом на груз 4 с массой ml действует сила инерции Fu, а в ветвях гибкой связи 20 - силы Та и Тв. Причем к корпусу 1 приложена сила сопротивления Rc, а вал вращения 2 имеет угловую скорость w. Расстояние между валом вращения 2 и пульсатором 9 имеет обозначение d, а между валом вращения 2 и грузом 4 - R. Вследствие свободного перемещения груза 4 на рычаге 3 происходит натяжение гибкой связи 20 и передача по ней кинетической энергии вращающихся рычага 3 и груза 4. На фиг.3, где представлена кинематическая схема работы устройства, раскрывается процесс преобразования кинетической энергии вращающегося вала 2 в поступательное движение корпуса 1 устройства. При каждом обороте рычага 3 с грузом 4 гибкая связь 20 будет передавать импульс силы валу вращения 2 и через него на корпус 1. Если силы действия гибкой связи 20 на корпус 1 будут превышать силу сопротивления (Та>Rc), а в точке размещения груза 4 не превышать силу инерции (Tв<Fu), то в результате такого взаимодействия возникает движущая сила устройства, равная F=Ta-Rc. Гибкая связь выполняет роль преобразователя сил и обеспечивает заданную траекторию движения груза 4 с массой ml. Подвижной груз 4 под действием вращающегося вала 2 и гибкой связи 20 совершает сложное движение по эллипсу. Уравнение траектории движения груза 4 с массой ml в полярных координатах имеет вид:
 ,
,
где е - эксцентриситет, равный OlD/OlB;
p - параметр эллипса - длина отрезка перпедикуляра, восстановленного в фокусе эллипса к его большой оси, до его пересечения с траекторией.
По условиям эллипса р=α(1-е2), где α - большая полуось эллипса, т.е.
α=АО1=BO1=R-0,5d.
Тогда:
 ,
,

После подстановки значений эксцентриситета и параметра эллипса в уравнение траектории и простых алгебраических преобразований получим
 ,
,
где R - радиус ротора,
d - плечо пульсатора - расстояние от оси вращения ротора до упора,
φ - полярный угол, φ=180°+α, где
α - угол эффективного импульса сил.
Так как по условиям эллипса алгебраическая сумма радиус-векторов r1 и r2 равна большой оси, то r1+r2=2R-d.
Тогда:
 ,
,
r2=2R-d-r1.
Последние формулы определяют основные геометрические параметры устройства и являются основой для дальнейшего расчета его динамических характеристик.
Гибкая связь 20 является одним из основных элементов устройства. Ее назначение заключается в преобразовании действующей на нее внешней силы Р и передаче импульсов сил как грузу 4 с массой ml, так и и корпусу 1 устройства с массой М в заданном направлении. При вращении рычага 3 гибкая связь 20 постоянно взаимодействует с подвижной массой ml и при каждом обороте кратковременно воспринимает силу реакции пульсатора 9, сталкиваясь с ним набегающей гибкой связью 20 в точке D, как это представлено на схеме сил, действующих на пульсатор во время работы устройства (фиг.4).

где Мкр - крутящий момент,
d - плечо - расстояние от оси вращения до точки D.
Для определения сил натяжения гибкой связи 20 разложим силу Р на две составляющие T1 и Т2 вдоль ветвей нити OD и CD и определим их проекции на координатные оси X и Y.
Проведем через точку D линию ML параллельно оси Y. Так как ∠MDK=∠COD=∠EDS=α и ∠LDN=∠OCD=β, то проекции сил на оси X и Y составят
По теореме о сложении сил имеем:
PCosα=T1Sinα+T2Sinβ
PSinα=T2Cosβ-T1Cosα.
Решая полученную систему уравнений относительно Т1 и Т2, находим
 ,
,
Выражая силу Р через крутящий момент Мкр и плечо d пульсатора 5, получим
 ,
,
Зная силы натяжения гибкой связи 20, определим ее действие на подвижную массу ml и М. Для этого перенесем силы T1 и Т2 вдоль линии их действия в точки А и В соответственно, как это представлено на схеме сил, действующих на груз 4 и вал вращения 2 устройства (фиг.5).
Материальные точки А и В являются шарнирными опорами и в момент импульса силы Р гибкая связь 20 действует на них также, как трос в подвижных блоках, стремясь их сблизить. Таким образом, в момент столкновения гибкой связи 20 с пульсатором 9 на точки А и В действуют векторные суммы сил T1 и Т2, значения которых определяются по правилу параллелограмма:
 ,
,
 .
.
Для определения положений векторов Та и Тв в пространстве проведем координатную ось X вдоль линии вектора Та, как это представлено на фиг.6. Через ось вала вращения 2 (точка А) и подвижную массу m1 (точка В) проведем подвижную координатную ось X', связанную с вращающимся рычагом 3. Тогда положение вектора Та определится углом γ1 между осями X и X', а вектора Тв - углом γ2 между вектором Тв и осью X'. Угол γ1 определится из условия равенства сумм проекций сил Т1 и Т2 и проекций их равнодействующей Та на ось X'
 ,
,
 ,
,
 .
.
Аналогично находим угол γ2:
 ,
,
 ,
,
 .
.
Силы натяжения гибкой связи 20 Т1 и Т2 не являются постоянными величинами, действуют импульсивно и с поворотом рычага 3 изменяются в больших пределах в течение малого промежутка времени τ. При равномерном вращении рычага 3 (ω=const, ε=0) в момент столкновения гибкой связи 20 с пульсатором 9 сила Р всегда постоянна и по величине, и по направлению. Но ее составляющие Т1 и Т2 изменяются в зависимости от положения ветвей гибкой связи 20. С увеличением угла α силы Т1 и Т2 уменьшаются до нуля (α=180°). Поэтому эффективным углом действия импульса силы Р следует считать наибольшее значение угла α, при котором гибкая связь 20 преобразует силу Р на входе в равную ей по величине силу действия Та на корпус 1. Эта зависимость представлена на диаграмме на фиг.7. В этом случае коэффициент преобразования fA должен быть равным единице:
 .
.
Такое положение гибкой связи происходит при каждом обороте рычага 3, когда малый радиус-вектор r2 совпадает с параметром эллипса р (r2=р) и составляющая Т2 становится равной силе Р, а Т1=0. Эта зависимость представлена на схеме изменения сил, действующих на вал вращения устройства (фиг.8). Предельное значение угла α зависит от конструктивной схемы параметров устройства (R и d) и в общем случае определяется по формуле
 ,
,
где р - параметр траектории,
d - плечо пульсатора.
Угол β определяется из треугольника ABD по заданному углу α по теореме синусов:
 ,
,
Малые значения угла α (α<0,1°), когда коэффициент преобразования стремится к бесконечности, как показано на диаграмме изменения коэффициента преобразования при малых значениях угла отклонения гибкой связи (фиг.9), а переменные силы действуют мгновенно, учитывать в практических расчетах очень сложно. Этот вопрос специального исследования на уровне микро- и нанотехнологий. Поэтому при определении основных характеристик заявляемого устройства следует принимать средние значения сил Т1 и Т2, действующих в секторе предельного угла α, а поэтому и средние значения коэффициентов преобразования равными:




Условия равновесия активных сил, действующих на заявленное устройство, целенаправленное изменение которых приводит корпус 1 в поступательное движение, графически представлены на схеме сил в системе координат, действующих на устройство (фиг.10). Выделим из системы движущиеся материальные точки А (ось вала вращения 2) и В (груз 4 с массой m1) и по принципу Даламбера представим уравнения их равновесия в проекциях на координатные оси X и X' при равномерном вращении вала 2 и вместе с ним рычага 3 (ω=const, ε=0).
Так как Fи=m1ω2R=Тв Cos γ2, то пороговое значение угловой скорости ротора выражается формулой
Пороговая частота вращения:
Следовательно, для уравновешивания сил в точке В необходимо приложить со стороны гибкой связи такую силу Тв, проекция которой на ось X была бы равна центробежной силе инерции Fи. Это условие имеет важное значение для дальнейшего расчета заявленного устройства, так как позволяет определить минимальную (пороговую) угловую скорость вращения рычага 3, при которой устанавливается динамическое равновесие подвижной массы ml.
Присоединим к действующим на точку В внешним силам Т1 и Т2 силу инерции подвижной массы Fu и определим сумму проекций этих сил на подвижную ось X':
Fи-Т1-Т2Cosβ=0.
Отсюда
Fи-ТвCosγ2,
так как
 Т1Х'=-T1, Т2Х'=-T2Cosβ,
Т1Х'=-T1, Т2Х'=-T2Cosβ,
TBX'=T1X'+T2X'=-TBCosγ2.
Условие динамического равновесия точки А, взаимодействующей непосредственно с корпусом 1, определяется равенством силы действия Та гибкой связи 20 и силы инерции покоя Rc корпуса 1 устройства (силы сопротивления движению). Линии действия этих сил проходят по оси X, и поэтому:
TA-RC=0
TA=RC.
Следовательно, динамическое равновесие установки относительно координатной оси X, совпадающей с направлением движения корпуса 1, достигается при условии:
Fи=Тв Cos γ2
ТA=Rc.
Пороговое значение окружной силы Р, соответствующей пороговой угловой скорости рычага 3, можно определить по коэффициентам преобразования и силам Та и Тв:
 ,
,
Преобразовывая выше приведенные уравнения, имеем:
Так как Та=Rc, то 
Отсюда находим взаимосвязь силы сопротивления движению корпуса 1 с основными параметрами заявленного устройства:
С увеличением оборотов рычага (ω>ωn) условие равновесия будет нарушено и корпус 1 устройства изменит свое положение, так как получит поступательное движение в пространстве. С увеличением скорости вращения рычага 3 происходит изменение соотношений действующих на корпус 1 сил и корпус 1 устройства выходит из состояния динамического равновесия:
 ,
,
ТA>RC.
На фиг.11 представлена схема изменения соотношения сил, действующих на корпус 1 устройства. Вектор силы тяги FT является равнодействующей составляющих сил Fu, Тв и Та, действующих в направлении оси X.
Перенесем силу Fв=Fu-Твх' вдоль линии ее действия в точку А и разложим на составляющие по осям X и Y.
Тогда:
Fвх=FвCosγ1
или
Fвх=(Fи-ТвCosγ2)Cosγ1.
Суммируя силы Та и Fвx, получим уравнение силы тяги устройства:
Fт=ТА+Fвх,
Fт=TA+(Fи-ТвCosγ2)Cosγ1.
Последняя формула связывает все основные параметры заявляемого устройства и является основным уравнением при расчете динамических характеристик.
Сила тяги зависит от угловой скорости вращающегося рычага 3 и эта зависимость представлена на диаграмме изменения силы тяги от угловой скорости вала вращения устройства (фиг.12). Сила тяги при соответствующей мощности, передаваемой валу вращения 2, может достигать значительных величин. Если сила тяги превышает силу сопротивления движению корпуса 1 устройства (Fт>Rc), то создается движущая сила F, которая и приводит корпус 1 в поступательное движение:
F=TA+(Fи-ТвCosγ2)Cosγ1-RC.
Сила сопротивления Rc определяется известными методами в зависимости от назначения устройства и сферы его применения. При трогании с места по поверхности следует определять силу трения покоя, применяя статический коэффициент трения. При движении в сплошной воздушной или водной среде необходимо определять силу аэродинамического или гидродинамического сопротивления. Так как в этом случае сила сопротивления зависит от скорости движения устройства.
При определении динамических характеристик заявленной установки следует учитывать, что движущая сила действует на установку импульсивно в зависимости от частоты вращения рычага 3. Интенсивность действия движущей силы (k) определяется числом столкновений гибкой связи 20 с пульсатором 9 в единицу времени по зависимости:
 .
.
Продолжительность действия импульса зависит от угла α и частоты вращения:

Тогда элементарный импульс движущей силы составит:
ΔS=Fτ,
который при равномерном вращении рычага 3 (ω=const, ε=0) является величиной постоянной. Поэтому суммарный импульс за некоторый промежуток времени t определится как произведение элементарного импульса ΔS на число столкновений гибкой связи 20 с пульсатором 9:
ΣS=ΔSkt.
Скорость движения корпуса 1 определяется согласно теореме об изменении количества движения по зависимости:
M(V-Vo)=ΣS,
где М - масса устройства,
Vo - начальная скорость,
V - конечная скорость,
ΣS - суммарный импульс.
Потребная мощность заявляемого устройства определяется при максимальной угловой скорости рычага 3 и соответствующей ей значением окружной силы:
N=PMAXdωMAX.
Управление вектором тяги F заключается в перемещении пульсатора 9 относительно оси вращения вала 2 в положение, соответствующее заданному направлению движения устройства (фиг.1). Поворот пульсатора 9 осуществляется ручкой 16 через рукоятку 12. При нажатии ручкой 16 подпружиненной рукоятки 12 она выходит из зацепления в фиксаторе 15 и при дальнейшем повороте ручкой 16 рукоятки 12 поворачивается ось вращения 11 ведущей шестерни 10, так как рукоятка 12 неподвижно соединена с осью вращения 11 ведущей шестерни 10. Одновременно поворачивается ведомая шестерня 6 на своей оси вращения 7, а вместе с осью вращения 7 поворачивается управляемая пластина 8 вместе с пульсатором 9. Пульсатор 9 занимает заданное положение, а рукоятка 12 под действием пружины 13 закрепляется в фиксаторе 15. Этим исключается самопроизвольное перемещение рукоятки 12. После этого устройство изменяет свое движение в пространстве. Если иметь соотношение количества зубьев ведущей шестерни 10 к ведомой шестерне 6 как 3:1, то при повороте рукоятки 12 на 60° пульсатор перемещается на 180° и вектор тяги меняет свое направление на противоположное. Это приводит к торможению или обратному (заднему) ходу. Величина силы тяги F регулируется оборотами вала вращения 2, который может приводиться во вращение от различных двигателей (например, от двигателей внутреннего сгорания, газотурбинных установок, электродвигателей, питающихся от аккумуляторных устройств с солнечными батареями, и др.), которые в заявляемом устройстве не рассматриваются.
При вращении вала 2 с подвижным грузом 3 (m1) вектор центробежной силы инерции Fυ постоянно меняет свое направление и величину (фиг.13). Возникающие при этом боковые силы могут вызывать нежелательные вибрации устройства или толчки. Для исключения этого явления боковые силы следует уравновешивать, например, установкой двух валов вращения, вращающихся синхронно с одинаковой угловой скоростью в противоположных направлениях, как это представлено на схеме возможного уравновешивания боковых составляющих центробежной силы Fa устройства с двумя параллельными валами разнонаправленного вращения (фиг.14) или с двумя параллельными рычагами разнонаправленного вращения (фиг.15). Отрицательное действие продольных сил может быть исключено, например, установкой на рычаг 3 неподвижного груза (балансира) массой m2, как это представлено на схеме уравновешивания продольных центробежных сил устройства (фиг.16).
Расстояние от оси вращения до центра тяжести балансира определяется из условия равенства сил инерции масс m1 и m2 при R=R0:
m1ω2Ro=m2ω2Rб,
m1Ro=m2Rб,
Масса m2 определяется по формуле
При Rб=R0 массы равны между собой (m1=m2).
Эффективным способом уравновешивания продольных сил, действующих в отрицательном направлении оси X, является применение систем с двумя гибкими связями, как это представлено на схеме (фиг.17). В этой схеме балансировки влияние продольных сил исключается полностью, так как сила инерции подвижной массы m1 в точке В всегда превышает силу инерции подвижной массы m1' в точке A (FB>FA). При этом достигается увеличение в два раза частоты элементарных импульсов силы тяги k.
При запуске заявляемого устройства, когда подвижная масса m1 (груз 4) может находиться в любом положении по отношению к оси вращения вала, вывод груза на траекторию вращения может осуществляться, например, при помощи специального защитного ограничителя, представленного на схеме ограничения движения груза (m1) при малых оборотах (W<Wmin) (фиг.18). Контур ограничителя эквидистантен заданной траектории движения груза.
На фиг.19 представлен общий вид действующей модели устройства с горизонтально вращающимся грузом (массой).
На фиг.20 представлен общий вид действующей модели устройства с вертикально вращающимся грузом (массой).
На фиг.21 представлена действующая модель устройства с горизонтально вращающимся грузом (массой) на безопорной платформе.
На фиг.22 представлена действующая модель устройства с вертикально вращающимся грузом (массой) на колесно-лыжной опоре.
На фиг.23 представлена действующая модель устройства с вертикально вращающимся грузом (массой).
Перечень обозначений
1. Корпус.
2. Вал вращения.
3. Рычаг.
4. Груз.
5. Прорезь в рычаге 3.
6. Ведомая шестерня.
7. Ось вращения ведомой шестерни 6.
8. Управляемая пластина.
9. Пульсатор.
10. Ведущая шестерня.
11. Ось вращения ведущей щестерни 10.
12. Рукоятка.
13. Пружина.
14. Плоскость у ведущей шестерни 10.
15. Фиксатор.
16. Ручка.
17. Выточка на валу вращения 2.
18. Выточка на грузе 4.
19. Выточка на пульсаторе 9.
20. Гибкая связь.
Источники информации
1. US 7105440 ВВ, F01C 13/00, 2004.
2. Нурбей Гулиа. 1) Инерционные двигатели для автомобилей. М.: «Транспорт», 1974. 2) Электронная версия: НиТ. Аналитический центр, 1999.
3. Электронная версия:
Источник: http//www.utro.m/articles/2004/07/02/325554.shtml.
4. Шипов Г.И. Теория физического вакуума в популярном изложении раздел «Инерциоид Толчина», рис.47, 49, М., 2002.








Изобретение относится к устройствам, преобразующим энергию вращающегося вала установки в поступательное движение установки по поверхности. Устройство включает корпус, в котором размещен вал вращения с рычагом, пульсатор, укрепленный на управляемый пластине, гибкую связь между корпусом и грузом, установленным на рычаге, и механизм управления движением корпуса. Указанный механизм включает перемещаемую в фиксаторе рукоятку и ведущую шестерню, входящую в зацепление с ведомой шестерней. На оси вращения ведомой шестерни закреплена управляемая пластина с пульсатором. Груз, удерживаемый гибкой связью, выполнен с возможностью свободного перемещения по рычагу. Решение направлено на обеспечение плавного перемещения устройства и упрощение конструкции. 3 з.п. ф-лы, 23 ил.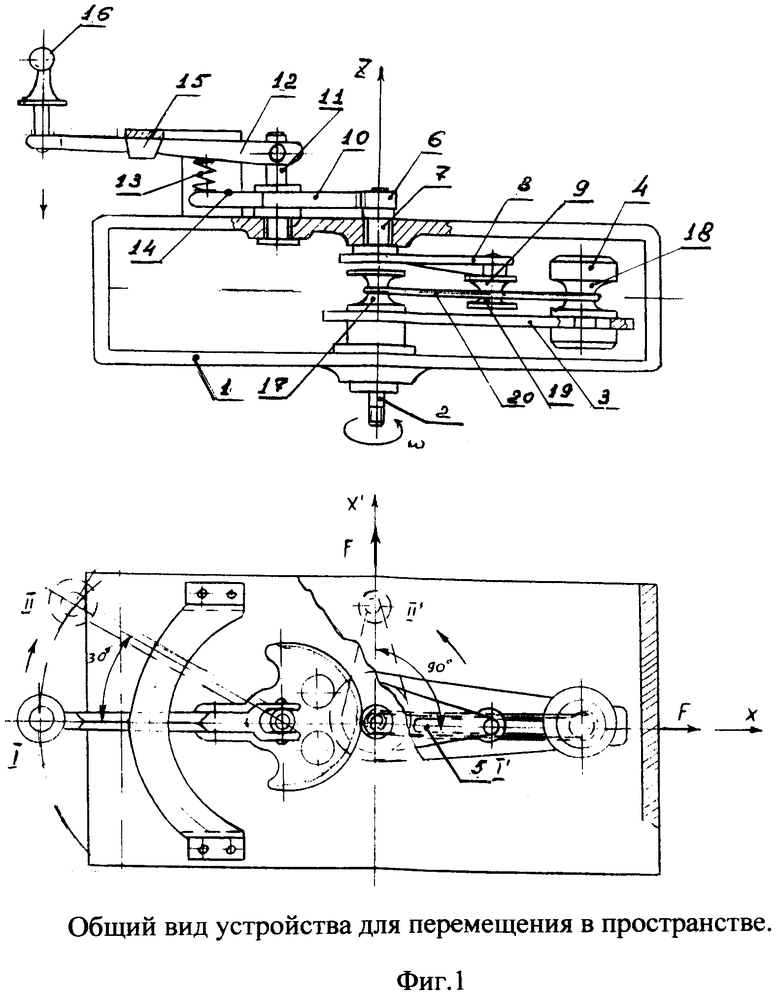
1. Устройство для перемещения в пространстве, преобразующее кинетическую энергию вращающегося вала в управляемое поступательное движение корпуса по поверхности, содержащее корпус, размещенный в нем вал вращения с жестко закрепленным перпендикулярно оси вала рычагом, пульсатор, укрепленный на управляемой пластине, гибкую связь между корпусом и грузом, установленным на рычаге, отличающееся тем, что устройство дополнительно содержит механизм управления движением корпуса, включающий перемещаемую в фиксаторе рукоятку, ведущую шестерню с осью вращения в корпусе, входящую в зацепление с ведомой шестерней, на оси вращения которой в корпусе жестко закреплена управляемая пластина с пульсатором, а также свободно перемещающийся по рычагу груз, удерживаемый кольцевой гибкой связью, охватывающей в одной плоскости вал, груз и пульсатор, оси которых параллельны.
2. Устройство для перемещения в пространстве по п.1, отличающееся тем, что рукоятка механизма управления выполнена подпружиненной.
3. Устройство для перемещения в пространстве по п.1, отличающееся тем, что выполнено с двумя валами разнонаправленного вращения, каждый из которых снабжен рычагом, пульсатором и гибкой связью.
4. Устройство для перемещения в пространстве по п.1, отличающееся тем, что выполнено с ограничителем движения груза при малых оборотах вала.
| Шипов Г.И | |||
| Теория физического вакуума в популярном изложении, раздел «Инерциоид Толчина» | |||
| - М., 2002, рис.47, 49 | |||
| RU 2001115911 A, 10.06.2003 | |||
| RU 2000116592 A, 27.04.2002. |

