Изобретение относится к электрическому моделированию и предназначено для измерения линейных перемещений фиксированной точки. .самоходной модели в процессе мореходных испытаний в опытовом бассейне, оборудованном .буксировочной тележкой, при про.извольном курсовом угле волны.
Основной особенностью движения судна на волнении при произвольном курсовом угле волны, которую необходимо принимать во внимание при мо.дел.ировании качки в опытовом бассейне, является наличие поперечных горизонтальных перемещений судна. Обычные буксировочные устройства, копользуемые для модельных мореходных испытаний, не обеспечивают моделям соответствующую степень свободы.
Наилучш.им образом моделирование качки может быть осуществлено при испытаниях самоходных моделей, оборудованных авторулевым. Наличие авторулевого и дви кительного комплекса на модели решает задачу ее буксировки 1пр.и курсовом угле волны. Однако при этом остается задача измерения кинематических параметров движения модели. Если .измерение углов крена, дифферента и рыскания может быть осуществлено достаточно ТОЧНО с помощью малогабаритных гироскопических устройств, то для измерения линейных перемещений модели (вертикальные,
продольные .и поперечные колебания центра тяжести) самоходная модель связывается с буксировочной тележкой посредством пилона, имеющего возможность перемещаться в трех взаимно перпендикулярных направлениях вместе с каретками координатного механизма. В этом случае на самоходную модель действуют реакции связ.и, искажающие ее качку. Кроме того, в разных ло направлению линейных перемещениях модели участвуют разные добавочные массы измерительной системы: в вертикальном - пилон, в поперечном-- нилон п каретка, в про.дольном - пилон и две каретки. Это затрудняет анализ полученных с помощью подобной установки результатов и требует минЕмизировать вес подвилсных элементов, участвующих в движении вместе с моделью. Однако вес этих подвижных частей не может быть значительно уменьшен по конструктивным .соображениям.
В известных устройствах свобода перемещений модели в продольном и поперечном направлениях обеспечивается за счет кареток координатного механизма. Для уменьшения влияния измерительного устройства на качку модели использованы разгрузочные серводвигатели, эффективность действия которых существенно уменьшается с увеличением частоты качки модели.
Целью изобретения является существенное уменьшение реакции связи между самоходиой моделью ,и измерительным устройством и массы подвижных частей, участвующих в колебательном движении вместе с моделью, кроме этого оставить постоянной эту массу, независимо от направления линейных неремещений модели н упростить конструкцию всего измерительного узла.
В предлагаемом устройстве поставленные цели достигаются тем, что с иомощью иитей, закреиленных одним концом в фиксированной точке модели (например, в точке, совладагощей с ее центром тяжести), а другим концом на шкивах, связанных с тележкой, неремещеиня точки модели преобразуются .в углы поворота шкивов. Угол поворота каждого шкива является мерой расстояния от выбранной точки модели до .соответствующего шкива. Поскольку положение точки модели, относительно тележки полностью определяется расстояниями до трех различных точек тележки, измереиие этих расстояний полностью решает задачу измерения перемещения фиксированной точки модели относительно буксировочной тележки.
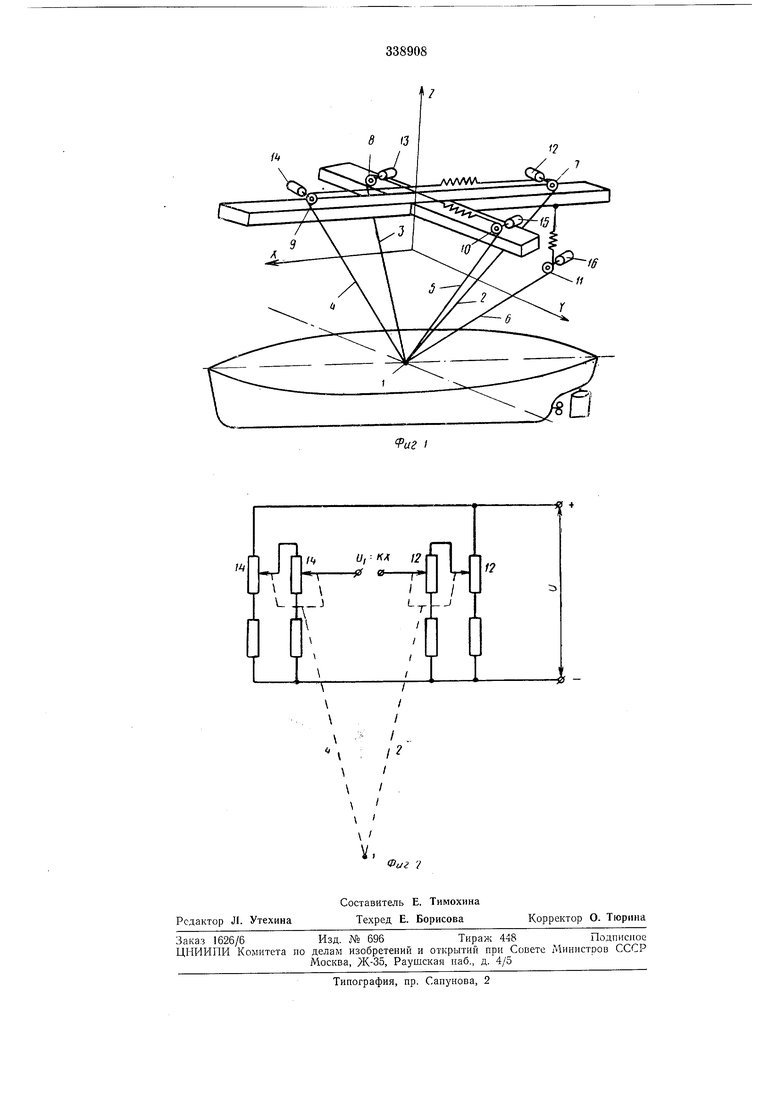
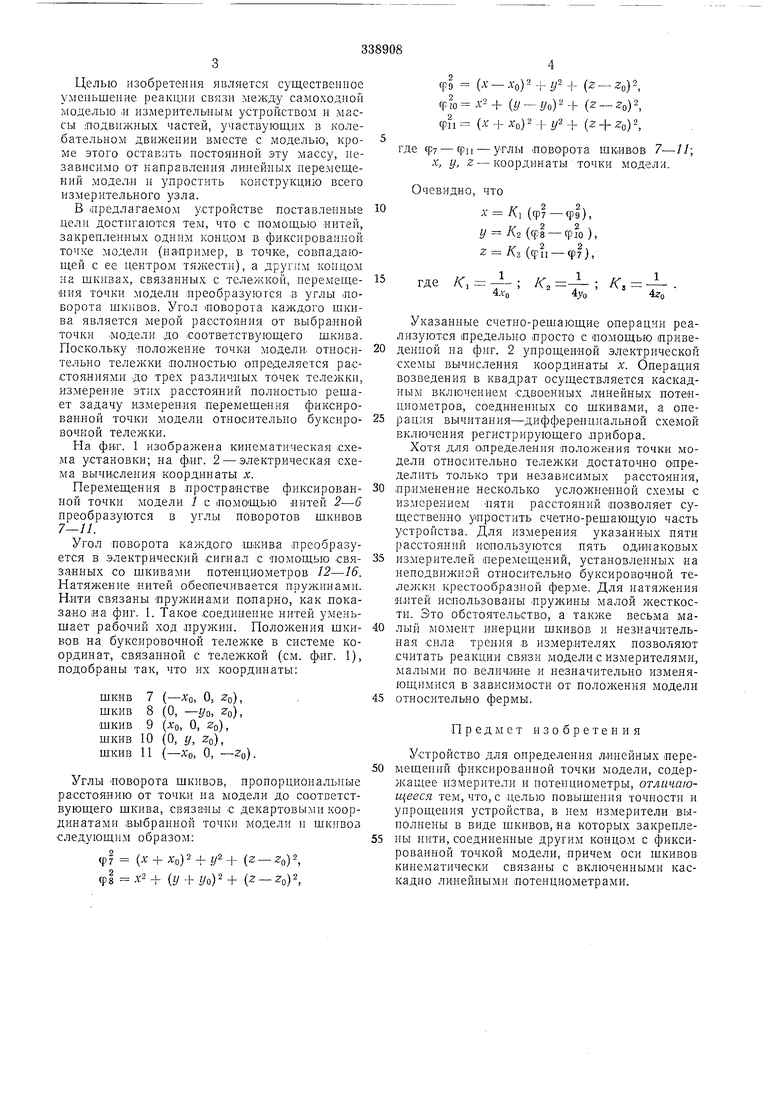
На фиг. 1 изображена кинематическая .схема установки; на ф.иг. 2 - электрическая схема вычисления координаты х.
Перемещения в пространстве фиксированной точки модели 1 с помощью нитей 2-6 преобразуются в углы поворотов ш,ки,вов 7-11.
Угол поворота каждого ш,кива преобразуется в электрический сигнал с помощью связанных со шкивами потенциометров 12-16. Натяжение нитей обеспечивается пружинами. Нити связаны пружинами попарно, как показано на фиг. 1. Такое соединение нитей уменьшает рабочий ход пружин. Положения шкивов на буксировочной тележке в системе координат, связанной с тележкой (см. фиг. 1), подобраны так, что их координаты:
шкив 7 (-Хо, О, ZQ), шкив 8 (О, -г/о, о),
шкив 9 (Хо, О, 2о),
шкив 10 (О, у, ZQ),
шкив И (Хд, О, -ZQ).
Углы поворота шкивов, пропорциональные расстоянию от точки на модели до соответствующего шкива, связаны с декартовыми координатами выбранной точки модели н шкивов следующим образом;
ф| (А- + го)2+г/2+ (2 -гo),
ф1 Х+ {У + Уо)+ (2 -2о)2,
грэ (A--A-o)2j-//2+ ()2,
Ф10 А2 + (у - у о) + (Z - го) 2, Фп- (х + го)2-нг/2 (z + zo)2,
ф7 - Фи - углы поворота шкивов 7-11; X, у, Z - координаты точки модел.
рдр /( - . . 1C - 1 . 1 - J
I 1 - , А 2 J S - . 4л-о уо4 0
Указаниые счетно-решающие операции реализуются предельно просто с помощью приведенной на фиг. 2 упрощенной электрической схемы вычисления координаты х. Операция возведения в квадрат осуществляется каскадным включением сдвоенных линейных потенциометров, соединенных со шкивами, а операция вычитания-дифференциальной схемой включения регистрирующего прибора.
Хотя для олределения положения точки модели относительно тележки достаточно определить только три независимых расстояния,
пр.именение несколько усложненной схемы с измерением пяти расстояний позволяет существенно упростить счетно-решающую часть устройства. Для измерения указанных пяти расстояний используются пять одинаковых
измерителей перемещений, установленных «а неподвижной относительно буксировочной тележки крестообразной ферме. Для натя кения нитей использованы пружины малой жесткостн. Это обстоятельство, а также весьма малый момент инерцни шкивов и незначительная сила трения .в измерителях позволяют считать реакции связи модели с измерителями, малыми по величине и незначительно изменяющимися в зависимости от положения модели
относительно фермы.
Предмет изобретения
Устройство для определения линейных перемещений фиксированной точки модели, содержащее измерители и иотенциометры, отличающееся тем, что, с целью повышения точности н упрощения устройства, в нем измерители выполнены в виде шкивов, на которых закренлены нити, соединенные другим концом с фиксированной точкой модели, причем оси шкивов кинематически связаны с включенными каскадио линейными потенциометрами.
rt
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для испытаний самоходной модели судна в опытовом бассейне | 1976 |
|
SU553514A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФОРМЫ НОСОВОЙ ОКОНЕЧНОСТИ КОРПУСА СУДНА | 2021 |
|
RU2765518C1 |
| Устройство для имитации движения судна при испытаниях в опытовом бассейне | 1987 |
|
SU1541109A1 |
| Установка для буксировочных испытаний модели судна в опытовом бассейне | 1982 |
|
SU1057362A2 |
| Судостроительный опытовый бассейн | 1979 |
|
SU1188041A1 |
| Устройство для имитации движения судна при испытаниях в опытовом бассейне | 1984 |
|
SU1248885A1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА НА МОРСКОМ ВОЛНЕНИИ С ЦЕЛЬЮ СНИЖЕНИЯ БОРТОВОЙ И КИЛЕВОЙ КАЧКИ И СИСТЕМА, РЕАЛИЗУЮЩАЯ СПОСОБ (ВАРИАНТЫ) | 2019 |
|
RU2720122C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ДВИЖЕНИЯ СУДОВ | 2000 |
|
RU2225314C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ В ОПЫТОВОМ БАССЕЙНЕ В ПРЯМОМ ДВИЖЕНИИ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ГОРИЗОНТАЛЬНОГО ОПЕРЕНИЯ ЭКРАНОПЛАНА | 2013 |
|
RU2531783C2 |