Изобретение относится к машиностроению, а именно к винтовым передачам с самоустанавливающейся гайкой и может найти применение, в частности, в нагруженных передачах винтовых подъемников.
Известен винтовой механизм /1/, содержащий ходовой винт; взаимодействующую с ним плавающую гайку с кольцевым пазом на наружной поверхности; ведомое звено; гайкодержатель в виде охватывающей гайку вилки, размещенной в кольцевом пазу гайки и связанной с ведомым звеном с возможностью поворота вокруг оси, перпендикулярной оси винта; сферические опоры в виде запрессованных в отверстие гайки штифтов со сферическими головками, предназначенными для передачи усилий между гайкой и вилкой, и поводок в виде штифта, запрессованного в ведомом звене с возможностью взаимодействия с прорезью, выполненной в гайке, для исключения ее проворачивания. На стенках кольцевого паза гайки сферические опоры закреплены попарно диаметрально.
Существенными недостатками известного винтового механизма являются громоздкость, несимметричность нагружения ведомого звена, а также ограниченная область его применения.
Наиболее близким по технической сущности к заявляемому изобретению является, выбранное в качестве прототипа, техническое решение /2/, в котором соединение корпуса с исполнительным органом осуществляется посредством резьбовых осей, установленных в щеках исполнительного органа, при этом своими цилиндрическими концами они входят в отверстия корпуса. При соединении частей корпуса посредством взаимно перпендикулярных пазов и выступов стяжными винтами получается монолитный корпус, части которого не могут сдвигаться друг относительно друга во время работы, в результате чего резьбовой элемент не защемляется во время работы. Тем самым улучшается эксплуатация резьбового соединения винт - гайка.
Таким образом, детали данного механизма в совокупности образуют шарнир с двумя степенями свободы. Оси вращения шарнира лежат в одной плоскости и взаимно перпендикулярны.
Существенными недостатками данного технического решения являются громоздкость узла, сложность конструкции и нетехнологичность.
Сопоставительный анализ с прототипом показывает, что предлагаемый винтовой механизм отличается новым выполнением гайки: гайка выполнена с четырьмя полусферическими отверстиями, равномерно ориентированными в центральной диаметральной плоскости; для обеспечения возможности совмещения в отверстия вложены стальные шарики с четырьмя ответными пазами-полуотверстиями крышки, прикрепленной к подвижному элементу с образованием кольцевого рабочего зазора между гайкой и подвижным элементом. При этом предлагаемый винтовой механизм с самоустанавливающейся гайкой содержит минимальное количество как оригинальных, так и стандартных деталей: четыре стальных шарика и три болта. Для размещения в корпусе цилиндрической формы минимальные габаритные размеры определяются только размерами резьбы механизма, диаметром примененных шариков и рабочего зазора между гайкой и цилиндрическим корпусом подвижной части.
Таким образом, изобретение соответствует критерию “новизна”.
Анализ известных технических решений в известной области и смежной с ней позволяет сделать вывод, что винтовые механизмы известны, однако предлагаемое выполнение плавающей гайки обеспечивает заявляемому изобретению такие новые качества, как упрощение конструкции, компактность узла, повышение технологичности, т.е. обеспечивает получение положительного эффекта.
Изобретение имеет изобретательский уровень, так как оно для специалиста явным образом не следует из уровня техники.
Изобретение является промышленно применимым, так как оно может быть использовано для различных устройств в разных областях народного хозяйства, например, для винтовых домкратов, механизмов подъемников, толкателей, устройств с ходовыми винтами.
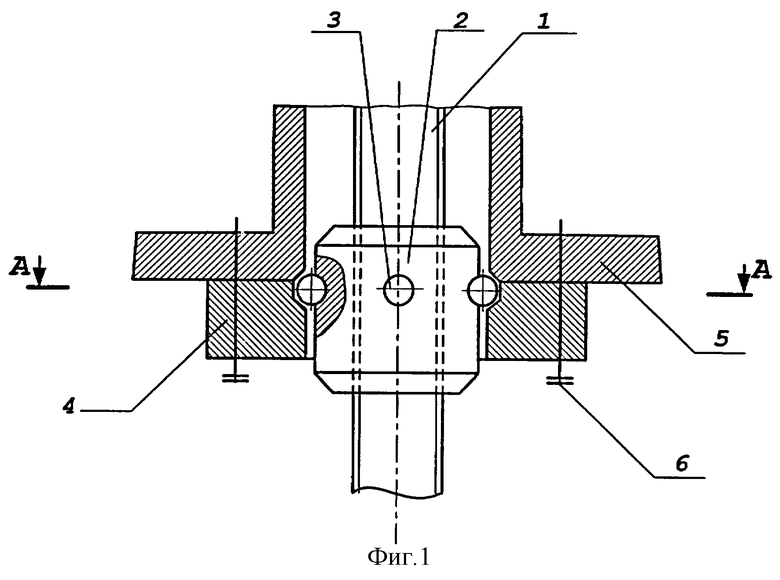
На фиг. 1 показан предлагаемый механизм,
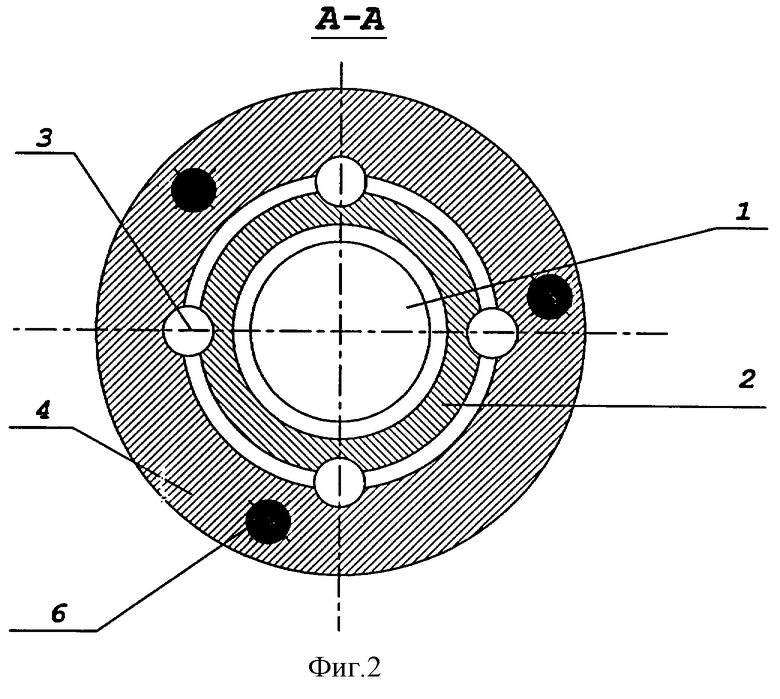
на фиг. 2 - разрез по А-А, где:
1 - ходовой винт;
2 - гайка с четырьмя полусферическими отверстиями;
3 - шарики, входящие в отверстия гайки;
4 - крышка с пазами-полуотверстиями;
5 - подвижная часть;
6 - болт.
Винтовой механизм содержит: ходовой винт 1; гайку 2 с четырьмя полусферическими отверстиями; шарики 3, входящие в эти отверстия; крышку 4 с четырьмя ответными пазами-полуотверстиями для размещения в них выступающих из гайки свободных половин шариков; подвижной части 5 в виде трубы с фланцем, к которому болтами 6 прикреплена крышка 4. Подвижная часть 5 имеет отдельное устройство (не показанное на рисунке), исключающее проворачивания фланца подвижной части при перемещении вдоль ходового винта.
Работает винтовой механизм следующим образом.
При вращении винта 1 происходит его (возможное) радиальное биение относительно движущейся части 5 и расположенной в нем гайки 2, а при перемещении подвижной части 5 в направляющей качения возможно изменение ее положения относительно винта в пределах допуска на несоосность направляющей качения и винта, и, как следствие, возможны перекосы гайки по винтовой поверхности 1. Однако ввиду закрепления гайки 2 в подвижной части 5 посредством четырех шариков таким образом, что в совокупности с деталями образуют шарнир с двумя степенями свободы, позволяющими гайке самоустанавливаться своей геометрической осью с осью винта, заклинивание винтовой передачи в расчетных пределах, определяемых допусками на изготовление опор винта, резьбовой поверхности и монтаж, исключается.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Авторское свидетельство SU №1679095, кл. F 16 Н 25/20, 1991. Рожанский Г.А., Курьянчик Л.М. Винтовой механизм.
2. Авторское свидетельство SU №1670260, кл. F 16 Н 25/24, 1991. Кропов Ю.С., Завилов Б.А., Титов А.В. Самоустанавливающаяся плавающая гайка.
| название | год | авторы | номер документа |
|---|---|---|---|
| Самоустанавливающаяся ходовая гайка | 2023 |
|
RU2812157C1 |
| ПРЕДОХРАНИТЕЛЬНАЯ МУФТА | 2021 |
|
RU2765893C1 |
| Винтовой механизм | 1985 |
|
SU1359532A1 |
| Винтовой механизм | 1989 |
|
SU1679095A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПОДЪЕМНИК | 1995 |
|
RU2092426C1 |
| Винтовая передача | 2022 |
|
RU2779490C1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ В ОДНОСТОРОННЕЕ ВРАЩАТЕЛЬНОЕ | 1994 |
|
RU2083895C1 |
| Червячно-винтовой прямоходный электромеханизм | 2023 |
|
RU2817765C1 |
| ДВЕРНОЙ ЗАМОК | 1992 |
|
RU2013511C1 |
| Автономный мобильный модуль роботизированного хирургического инструмента | 2019 |
|
RU2715684C1 |
Изобретение относится к машиностроению, а именно к винтовым передачам с самоустанавливающейся гайкой, и может применяться, в частности, в нагруженных передачах винтовых подъемников. Винтовой механизм содержит ходовой винт, гайку с четырьмя полусферическими отверстиями, шарики, входящие в эти отверстия, крышку с четырьмя ответными пазами-полуотверстиями для размещения в них выступающих из гайки свободных половин шариков, подвижной части в виде трубы с фланцем, к которому болтами прикреплена крышка. Подвижная часть имеет отдельное устройство, исключающее проворачивания фланца подвижной части при перемещении вдоль ходового винта. Технический результат – повышение надежности механизма при эксплуатации. 2 ил.
Винтовой механизм, содержащий ходовой винт, взаимодействующую с ним плавающую гайку в подвижном звене, отличающийся тем, что, с целью повышения надежности, гайка выполнена с четырьмя полусферическими отверстиями, равномерно ориентированными в центральной диаметральной плоскости для обеспечения возможности совмещения вложенных в них стальных шариков с четырьмя ответными пазами-полуотверстиями крышки, прикрепленной к подвижному элементу с образованием кольцевого рабочего зазора между гайкой и подвижным элементом.
| Самоустанавливающаяся плавающая гайка | 1989 |
|
SU1670260A1 |
| Винтовой механизм | 1989 |
|
SU1679095A1 |
| ВИНТОВАЯ ПАРА С ТРЕНИЕМ КАЧЕНИЯ | 1998 |
|
RU2148746C1 |
| 0 |
|
SU174778A1 |

