Изобретение относится к винтовым механизмам точного движения и предназначена для использования в 3D-принтерах и станках с программным управлением, а также может быть использована в других областях точной механики.
Известна винтовая передача (см. патент РФ №202741, МПК F16H 25/00, опубликовано 03.03.2021, Бюл. №7), содержащая винт, взаимодействующую с ним гайку, встроенную в гайкодержатель внутренний, имеющий полуоси, которые опираются на боковины гайкодержателя наружного, представляющего из себя рамку и состоящего из двух полуосей и двух боковин, стянутых между собой болтами, а гайка снабжена шпоночным соединением, удерживающим ее от поворота вокруг оси винта (принято за аналог).
Недостатком устройства является использование узлов трения скольжения для компенсации несоосности и непараллельности осей вращающихся деталей. Наличие сил трения скольжения снижает точность позиционирования подвижного элемента.
Наиболее близким по технической сути является устройство для линейного перемещения (см. авторское свидетельство SU №1580098, МПК F16H 25/24, опубликовано 23.07.1990, бюл. №27), содержащее ходовой винт, взаимодействующую с ним самоустанавливающуюся плавающую гайку, закрепленные на ней полуоси с установленными на них сепараторами с шариками, на которых установлен гайкодержатель, выполненный в виде замкнутого контура, подвижный элемент, установленный в направляющих, и связанный с гайкодержателем при помощи полуоси с сепаратором и шариками (принято за прототип).
Недостатками устройства являются: высокая трудоемкость при изготовлении беговых дорожек, осевых канавок и гайкодержателя. Для эффективной работы устройства необходима высокая точность обработки наружного и внутреннего колец для обеспечения соосности при сборке подшипниковых узлов и, как следствие, усложнение ремонта узлов. Кроме того, подшипники изготавливаются с учетом теплового расширения при изменении температуры и в них всегда присутствует некоторый тепловой зазор, что негативно сказывается на точности при изменении вектора приложения силы на противоположный.
Техническая проблема состоит в том, что вследствие неточности изготовления (не прямолинейность винта) и погрешности монтажа винта относительно гайки без использования компенсирующих устройств возникают силы, воздействующие на направляющие вдоль плоскости XY. В случае использования жесткой станочной рамы возникает повышенный износ пары винт-гайка, а при работе в станках и устройствах, где в высокой жесткости нет необходимости (например, ось Z 3D-принтеров), возникает паразитный эффект - раскачивание подвижного элемента в плоскости, перпендикулярной оси перемещения.
Технический результат, на достижение которого направлено заявляемое техническое решение, снижение износа винта и гайки, а также снижение требований к погрешности их изготовления и монтажа, повышение долговечности и точности устройства.
Указанная техническая задача решается за счет того, что винтовая передача, содержащая ходовой винт, взаимодействующую с ним ходовую гайку, закрепленную в гайкодержателе, плавающий элемент и связанный с гайкодержателем подвижный элемент, установленный в направляющих, гайкодержатель выполнен в виде полумуфт, смонтированных перпендикулярно оси ходового винта зеркально друг другу с поворотом на 90° вокруг оси винта, с установленными в них шариками, для связи с плавающим элементом, выполненным в виде крестовины с двумя парами взаимно перпендикулярных плоских кулачков, входящих в выполненные в полумуфтах диаметрально расположенные вертикальные пазы и соединенные с полумуфтами посредством шариков, взаимодействующих с магнитами, размещенными в соосных отверстиях, выполненных в полумуфтах, а шарики для связи с плавающим элементом оснащены магнитами, размещенными в соосных отверстиях, выполненных в плавающем элементе и полумуфтах.
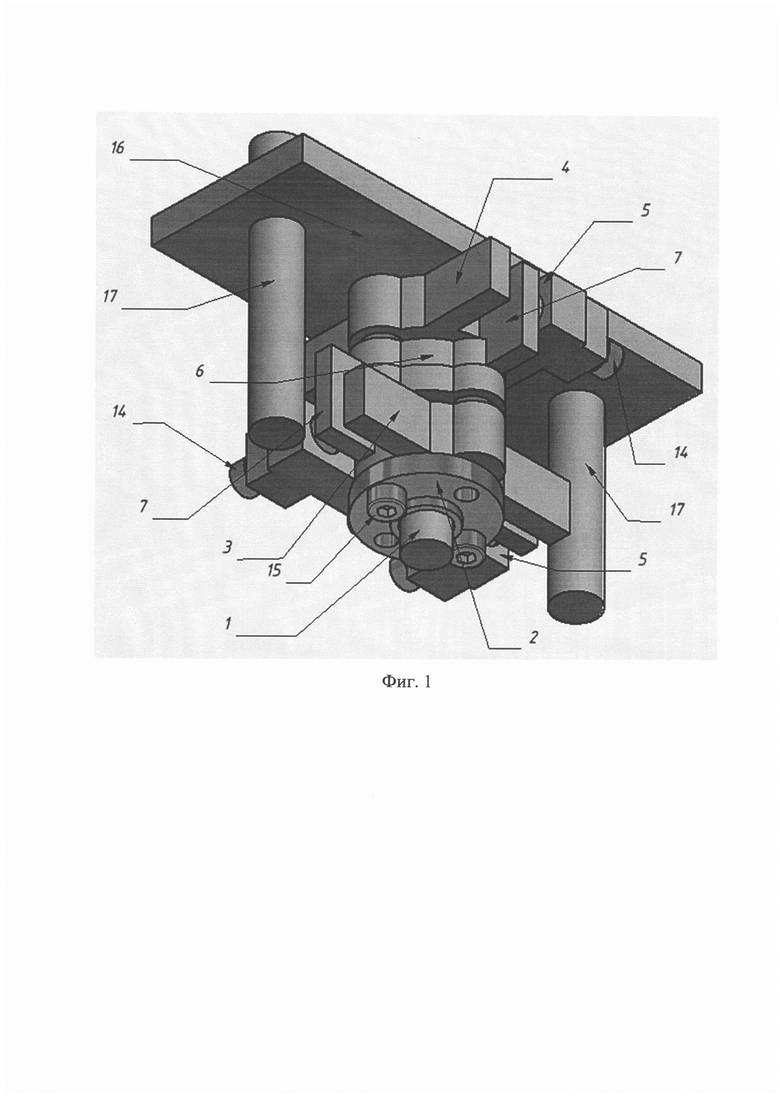
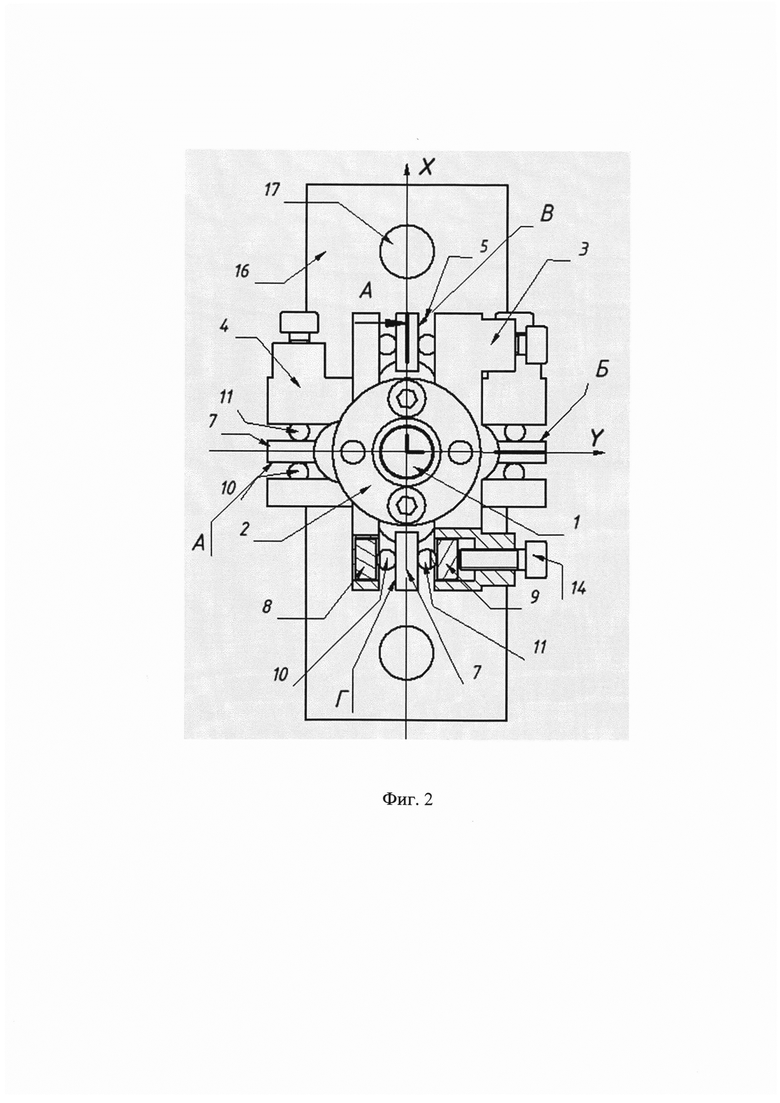
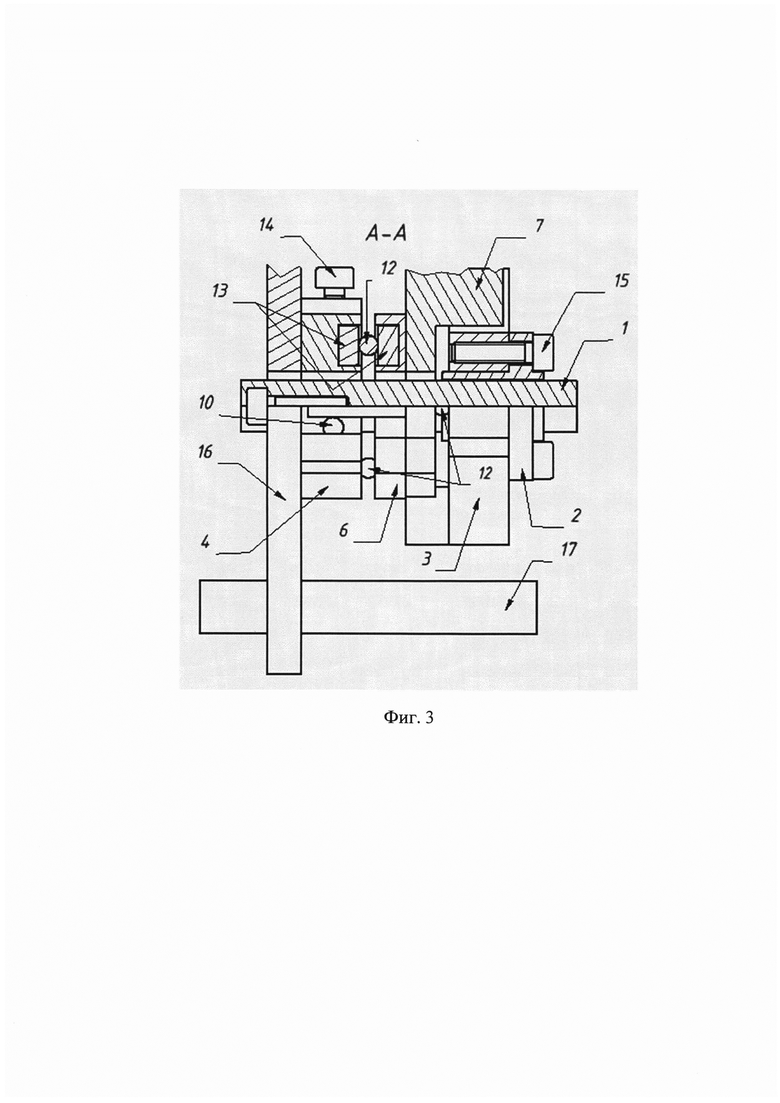
Сущность заявляемой полезной модели поясняется чертежами, где на фиг.1 представлен общий вид винтовой передачи, на фиг.2 - вид снизу, на фиг.3 - вид сбоку.
Винтовая передача содержит ходовой винт 1, взаимодействующую с ним ходовую гайку 2, расположенные перпендикулярно оси винта 1 зеркально друг другу с поворотом 90° вокруг оси винта полумуфту 3 и полумуфту 4, каждая из которых имеет по паре диаметрально расположенных пазов 5, размещенный между ними плавающий элемент 6 в виде крестовины с двумя парами взаимно перпендикулярных плоских кулачков 7, входящих в соответствующие пазы полумуфт. В каждом пазу полумуфт 3 и 4 выполнены отверстия, в которые установлены магниты 8 и 9, с контактирующими с ними стальными шариками 10 и 11, входящими в ответные пазы, выполненные в кулачках 7. В полумуфтах 3 и 4 установлены шарики 12, для связи с крестовиной 6, оснащенные магнитами 13, размещенными в отверстиях, выполненных в полумуфтах и крестовине. Постоянный контакт обеспечивается установленными по два в каждой полумуфте поджимными винтами 14. Полумуфта 3 прикреплена к ходовой гайке 2 крепежным винтом 15, а полумуфта 4 - крепежным винтом к подвижному элементу 16, который связан с направляющими 17.
Магниты устанавливаются таким образом, чтобы при сборке всей конструкции ее элементы притягивались друг к другу. Отверстия для установки магнитов в полумуфтах предусмотрены глубже высоты используемых магнитов для ограничения подвижности шариков. Использование магнитов исключает перемещение шариков к кромке отверстий, в которых установлены магниты в пределах рабочего хода механизма (возможностей компенсации). Магниты, размещенные в соосных отверстиях, выполненных в плавающем элементе и полумуфтах, не имеют каких-либо зазоров, что позволяет относительно свободно смещаться ходовому винту в плоскости XY и при этом компенсировать наклон оси винта относительно плоскости XY, перекатываясь на шариках.
Использование магнитов обусловлено необходимостью создания тянущего усилия, передаваемого ходовой гайкой 2 на подвижный элемент 16, направленное от подвижного элемента.
Винтовая передача работает следующим образом.
При вращении ходового винта 1, передаче вращательного движения ходовой гайке 2 препятствует ее соединение с полумуфтой 4 через кулачки 7 крестовины 6 и установленные между ними магниты 8 и 9, с шариками 10 и 11, в результате чего вращательное движение преобразуется в поступательное, которое передается на крестовину 6 через установленные в полумуфте 3 магниты 13 через шарики 12 и установленные в крестовине 6 магниты 13, а крестовиной 6 передается на полумуфту 4 через установленные зеркально с поворотом на 90° вокруг оси ходового винта 1 в крестовине 6 магниты 13 через шарики 12 и установленные в полумуфте 4 магниты 13 и далее на подвижный элемент 16, на котором закреплена полумуфта 4.
При отклонении оси вращения ходового винта 1 от оси направляющих 17 подвижного элемента 16 в плоскости XY, ходовая гайка 2 вместе с полумуфтой 3, на которой она закреплена, увлекаемая паразитным радиальным усилием ходового винта 1, смещается вместе с ним в плоскости XY за счет качения шариков 10, 11 и 12, размещенных между кулачками крестовины 6 и полумуфтами 3 и 4, компенсируя радиальную несоосность.
При непараллельности плоскости подвижного элемента 16 и плоскости ходовой гайки 2 свободный наклон ходовой гайки 2 обеспечивается за счет перекатывания шариков 10, 11 и 12 по соответствующим поверхностям крестовины 6 и полумуфт 3 и 4, компенсируя угловую несоосность. В результате обеспечивается свобода перемещения полумуфты 3 относительно полумуфты 4 по осям X и Y, и компенсируется радиальная несоосность за счет перемещения крестовины 6 в двух взаимно перпендикулярных направлениях путем перекатывания ее поверхностей А, Б, В, Г по соответствующим шарикам 10 и 11 и поверхностей магнитов 8 и 9 полумуфт 3 и 4 и шарикам 12, установленным между магнитами 13 крестовины и полумуфт 3 и 4.
Компенсируя радиальную и угловую несоосность, винтовая передача снижает паразитную нагрузку на компоненты устройства, в котором она применяется, за счет свободного хода в пределах поверхностей качения, что в свою очередь снижает трение и в результате снижается износ и повышается точность работы всей системы.
В отличие от прототипа в предлагаемой винтовой передаче отсутствуют зазоры между поверхностями качения за счет использования магнитов и шариков вместо подшипников, в которых всегда предусмотрен тепловой зазор. Такое решение позволяет повысить точность линейного перемещения при изменении вектора приложения силы к подвижному элементу на противоположный.
Достоинствами предлагаемой винтовой передачи являются:
- простота изготовления тел качения;
- ускорение и удешевление производства устройства;
- универсальность частей (полумуфты 3 и 4 одинаковые);
- простота ремонта.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИНТОВОЙ МЕХАНИЗМ | 2002 |
|
RU2226246C2 |
| Гайка-шарнир | 1986 |
|
SU1388636A1 |
| Устройство линейного перемещения исполнительного органа | 1989 |
|
SU1719753A1 |
| СУДОВОЙ ПОДЪЕМНИК | 2012 |
|
RU2497743C1 |
| Устройство для линейного перемещения | 1988 |
|
SU1580098A1 |
| Устройство для преобразования вращательного движения в поступательное | 1981 |
|
SU1105706A1 |
| Винтовая передача | 1985 |
|
SU1320572A1 |
| Винтовая передача | 1986 |
|
SU1367629A1 |
| СПАСАТЕЛЬНАЯ ШЛЮПКА С УСТРОЙСТВОМ ДЛЯ ОБЕСПЕЧЕНИЯ ЕЕ ХОДА | 2011 |
|
RU2479462C1 |
| Винтовая передача | 1985 |
|
SU1285235A1 |
Изобретение относится к области машиностроения, а более конкретно к винтовым передачам. Винтовая передача содержит ходовой винт, взаимодействующую с ним ходовую гайку, закрепленную в гайкодержателе, плавающий элемент и связанный с гайкодержателем подвижный элемент. Подвижный элемент установлен в направляющих. Гайкодержатель выполнен в виде двух полумуфт, смонтированных перпендикулярно оси ходового винта зеркально друг другу с поворотом 90° вокруг оси винта, с установленными в них шариками. Плавающий элемент выполнен в виде крестовины с двумя парами взаимно перпендикулярных плоских кулачков, входящих в выполненные в полумуфтах. Соединение с полумуфтами выполняется посредством шариков, взаимодействующих с магнитами, размещенными в соосных отверстиях, выполненных в полумуфтах. Шарики для связи с плавающим элементом оснащены магнитами, размещенными в соосных отверстиях, выполненных в плавающем элементе и полумуфтах. 1 з.п. ф-лы, 3 ил.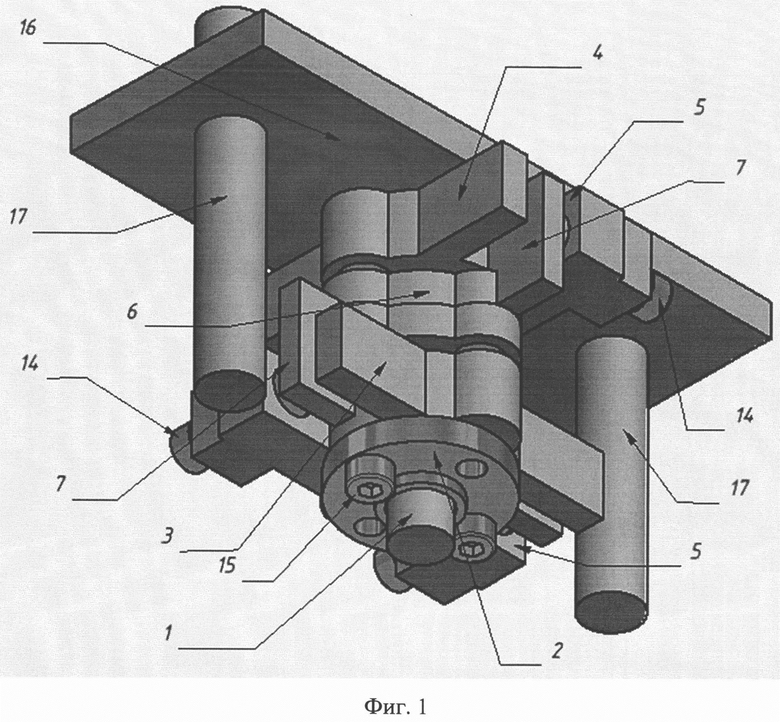
1. Винтовая передача, содержащая ходовой винт, взаимодействующую с ним ходовую гайку, закрепленную в гайкодержателе, плавающий элемент и связанный с гайкодержателем подвижный элемент, установленный в направляющих, отличающаяся тем, что гайкодержатель выполнен в виде двух полумуфт, смонтированных перпендикулярно оси ходового винта зеркально друг другу с поворотом на 90° вокруг оси винта, с установленными в них шариками, для связи с плавающим элементом, выполненным в виде крестовины с двумя парами взаимно перпендикулярных плоских кулачков, входящих в выполненные в полумуфтах диаметрально расположенные вертикальные пазы и соединенные с полумуфтами посредством шариков, взаимодействующих с магнитами, размещенными в соосных отверстиях, выполненных в полумуфтах.
2. Винтовая передача по п. 1, отличающаяся тем, что шарики для связи с плавающим элементом оснащены магнитами, размещенными в соосных отверстиях, выполненных в плавающем элементе и полумуфтах.
| Винтовая магнитная передача | 1988 |
|
SU1620743A1 |
| Устройство для линейного перемещения | 1988 |
|
SU1580098A1 |
| Винтовая передача | 1982 |
|
SU1133445A1 |
| Магнитная винтовая передача | 1983 |
|
SU1219850A1 |
| US 5456134 A1, 10.10.1995. | |||

