Изобретение относится к линейным исполнительным механизмам и может быть использовано в качестве силового привода в различных гидротехнических сооружениях и отраслях промышленности. При работе исполнительный механизм находиться под осевой растягивающей и сжимающей нагрузкой от устройств.
Известен исполнительный механизм (RU №2486104 С2, опубл. 27.06.2013 г.), состоящий из первого устройства линейного перемещения, содержащего первый винт линейного перемещения, первую гайку и первый первичный движитель, обеспечивающие относительное линейное перемещение между первым винтом линейного перемещения и первой гайкой, и из второго устройства линейного перемещения, содержащего второй винт линейного перемещения, вторую гайку и второй первичный движитель, установленные с возможностью относительного линейного перемещения между вторым винтом линейного перемещения и второй гайкой, при этом исполнительный механизм установлен с возможностью выдвижения при относительном линейном перемещении между первым винтом линейного перемещения и первой гайкой, или при относительном движении между вторым винтом линейного перемещения и второй гайкой, а первое или второе устройство линейного перемещения установлены с возможностью продолжения перемещения при заклинивании одного из устройств линейного перемещения, первого или второго, отличающийся тем, что первое устройство линейного перемещения установлено с возможностью обратного перемещения.
Недостатком исполнительного механизма является отсутствие редуктора для обеспечения большого линейного усилия на штоке, а также отсутствие подвижной опоры незакрепленного конца винта, для уменьшения прогиба винта под собственным весом в горизонтальном положении, и малая нагрузочная способность под действием осевой сжимающей нагрузки по критерию устойчивости.
Известен электромеханический линейный привод (RU №2522646 С2, опубл. 20.07.2014 г.) состоящий из корпуса; расположенного внутри корпуса электродвигателя с ротором, установленным в подшипниках и соединенным через редуктор с винтом винтового или шарико-винтового механизма; датчика положения ротора электродвигателя; толкателя, размещенного в корпусе с возможностью поступательного движения и имеющего стопор, исключающий его вращение относительно корпуса.
Недостатком данного электромеханического линейного привода является то, что, вместо цилиндрического или планетарного, установлен волновой редуктор, имеющий меньший КПД и сложную технологию изготовления. Так же один из концов винта шарико-винтового механизма не имеет подвижной опоры внутри толкателя для компенсации прогиба при втянутом положении штока, что уменьшает максимальный возможный ход.
Известен линейный актуатор (US 7594450, опубл. 29.09.2009 г.), состоящий из мотор-редуктора, содержащего двигатель и корпус, соединенный с двигателем, причем двигатель снабжен червяком, расположенным в корпусе. Механизм имеет винт, расположенный в корпусе, крепежную втулку, соединенную с винтом, червячную передачу, соединенную с креплением и соединенную с червяком в основании, и телескопическую трубу соединенную резьбой с винтом. Муфта находится в корпусе мотор-редуктора, содержит корпус муфты, неподвижно прикрепленный к винту, и муфту, соединенную с фиксирующей втулкой и подвижную в осевом направлении относительно фиксирующей втулки. Тяга содержит рычаг тяги, шарниры соединенные с внешней стороной мотор-редуктора, при этом рычаг тяги снабжен выступающими частями соответствующими муфте, для управления действием муфты. При этом винт механизма снабжен радиальным отверстием на одной стороне корпуса муфты, предусмотрена удлиненная канавка, а вставной штифт находиться в радиальном отверстии и введен в удлиненную канавку.
Недостатком линейного актуатора является применение в мотор-редукторе червячной передачи, имеющей меньший КПД по сравнению с цилиндрическими передачами, применение механического устройства включения муфты с большим количеством механических соединений.
Известен линейный актуатор (US 6145395, опубл. 14.11.2000 г.), состоящий из двигателя, удлиненного корпуса, имеющего один концевой участок рядом с двигателем и противоположный концевой участок, удаленный от него, привод, расположенный внутри корпуса и приводимый в действие двигателем для осевого перемещения в прямом и обратном направлении внутри корпуса приводной элемент, телескопически размещенный внутри корпуса и соединенный с приводом и приводимый им в действие для внешнего удлинения от противоположных концевых частей корпуса в различной степени и устройство для компенсации боковой нагрузки содержащее, по меньшей мере одно кулачковое коромысло, прикрепленное к корпусу параллельно направления осевого перемещения привода, и, по меньшей мере один кулачковый ролик, прикрепленный к приводу, в котором кулачковый ролик входит в зацепление с кулачковым коромыслом для компенсации боковой нагрузки.
Недостатком линейного актуатора является применение подшипника скольжения для подвижной опоры винта вместо подшипника качения.
Наиболее близкое устройство к заявленному техническому решению имеет линейный актуатор (RU №2700562 С1, опубл. 20.09.2019 г.), характеризующийся наличием двигателя с выходным валом и корпуса, внутри которого расположены винтовой механизм и шариковый механизм компенсации нежелательной нагрузки, причем винтовой механизм включает в себя ходовой винт, взаимодействующую с ним гайку и выдвижной шток, концентрично расположенный вокруг, по меньшей мере, части ходового винта и соединенный с указанной гайкой, при этом винтовой механизм соединен с двигателем таким образом, что вращение его выходного вала вызывает осевое перемещение гайки и выдвижного штока относительно корпуса, упомянутый шариковый механизм компенсации нежелательной нагрузки образован, по меньшей мере, двумя продольными направляющими канавками на внутренней поверхности корпуса, по меньшей мере, двумя ответными продольными направляющими канавками на внешней поверхности выдвижного штока и шариковым сепаратором с, по меньшей мере, двумя рядами ячеек, выполненными напротив указанных направляющих канавок, в которых с возможностью свободного вращения размещены шарики, обкатывающие поверхности этих направляющих канавок.
Недостатком упомянутого линейного механизма является отсутствие подшипника качения в подвижной опоре винта, сложность изготовления штока механизма из-за его формы, применение шариковых упорно-радиальных подшипников, имеющих меньшую грузоподъемность по сравнению с упорно-радиальными сферическими подшипниками.
Техническим результатом заявленной конструкции линейного исполнительного механизма является повышение надежности и ресурса, упрощение конструкции, улучшение технических характеристик, расширение функциональных возможностей.
Технический результат достигается тем, что линейный исполнительный механизм содержит корпус, в котором размещен шток, имеющий возможность перемещаться вдоль своей оси и закрепленный от поворота посредством сегментной шпонки, шариковинтовая передача, установленная в штоке и связывающая шток и корпус через винт шариковинтовой передачи с установленными на его конце гайкой и двумя обоймами. Обоймы имеют установленные роликовые сферические упорно-радиальные подшипники и шариковые радиально-упорные подшипники, причем винт соединен с электродвигателем через цилиндрический редуктор, между обоймами расположен пружинный демпфер, состоящий из тарельчатых пружин и опорных шайб, имеющих возможность взаимодействовать с тарельчатыми пружинами с каждой из сторон. Демпфер содержит датчики перемещения тарельчатых пружин. Винт с одной стороны опирается на шток через дополнительную скользящую опору, содержащую подшипник качения. Винт соединен с цилиндрическим редуктором посредством подвижного шпоночного соединения.
Установка дополнительной подвижной опоры на конце винта позволяет уменьшить прогиб винта под собственным весом и исключить чрезмерное биение конца винта при вращении.
Расположение демпфера между обоймами позволяет определять величину нагрузки на штоке механизма и выполняет функцию демпфирования динамических нагрузок, при этом повысив компактность и уменьшив массу электроцилиндра.
Установка цилиндрического редуктора в качестве привода винта позволяет повысить надежность и эффективность всего механизма.
Установка подвижного шпоночного соединения между винтом и цилиндрическим редуктором позволяет скомпенсировать перемещение винта под нагрузкой при деформации тарельчатых пружин демпфера.
На фиг 1. представлен продольный разрез линейного исполнительного механизма
На фиг. 2 представлен продольный разрез линейного исполнительного механизма в плоскости, перпендикулярной фиг. 1.
Предлагаемый линейный исполнительный механизм содержит корпус 1, в котором размещен шток 2, с установленной внутри него гайкой 4 шариковинтовой передачи и стопорной шпонкой 21, закрепляющей гайку 4. Шток 2 через сделанный в нем прямоугольный паз и сегментную шпоноку 15 связан с корпусом 1 посредством болтов 16. Сегментные шпонки 15 не позволяют штоку 2 проворачиваться вокруг своей оси. Винт 3 устанавливается в две обоймы 7 через роликовые сферические упорно-радиальные подшипники 11 и шариковые радиально-упорные подшипники 22, которые находятся в обоймах 7 на расстоянии. Обоймы 7 с подшипниками 11 связаны с корпусом посредством двух опорных поверхностей и тарельчатых пружин, образующих демпфер 6, в котором установлены тарельчатые пружины 13 и датчик перемещения пружин 12. Конец винта 3, выступающий из обоймы, связан с цилиндрическим редуктором 8, находящемся в отдельном корпусе, через подвижное шпоночное соединение, состоящее из подвижной шпонки 18, втулки 20 и хвостовика 19 цилиндрического редуктора 8. Привод цилиндрического редуктора 8 осуществляется электродвигателем 9. Правый конец винта 3 опирается на внутреннюю поверхность штока 2 через дополнительную скользящую опору 5, содержащую подшипник качения. Шток 2 исполнительного механизма соединяется с приводимым узлом. Крепление линейного исполнительного механизма осуществляется с помощь кронштейна 14, соединенного с корпусом 1.
Линейный исполнительный механизм работает следующим образом. При втягивании и выдвижении штока 2 электродвигатель 9 приводит во вращение планетарный редуктор 8, который в свою очередь вращает винт 3, который перемещает гайку 4, установленную в штоке 2, который удерживаемый от реактивного момента посредством сегментной шпонки 15. При перемещении штока 2 его наружная поверхность перемешается, взаимодействуя с внутренней поверхностью корпуса 1 и боковыми поверхностями сегментной шпонки 17, а так же наружная поверхность опоры 5 взаимодействует с внутренней поверхностью штока 2. При достижении штоком 2 крайнего втянутого или выдвинутого положения, один из двух соответствующих датчиков 10 выдает об этом сигнал. Перемещение штока приводит к изменению объема внутренней полости линейного исполнительного механизма, компенсация которого производиться посредством впуска или выпуска воздуха через воздушный фильтр 17.
Шток 2 в процессе перемещения воспринимает растягивающую или сжимающую нагрузку, передающуюся на тарельчатые пружины 13 демпфера 6, которые демпфируют изменение нагрузки посредством сжатия и трения между торцевыми поверхностями. Данные о нагрузке и ее изменении регистрируются датчиком 12 перемещения тарельчатых пружин. При сжатии или растяжении винт 3 перемещается вдоль своей оси, относительно выходного вала редуктора 19 посредством подвижной шпонки 18, установленной во втулке 20.
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейный исполнительный механизм гидросооружений | 2021 |
|
RU2752672C1 |
| ЛИНЕЙНЫЙ АКТУАТОР И ЛИНЕЙНЫЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ | 2018 |
|
RU2700562C1 |
| РУЛЕВОЙ ПРИВОД | 2009 |
|
RU2387577C1 |
| Электромеханический привод поступательного действия | 2022 |
|
RU2786248C1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД | 2004 |
|
RU2464451C2 |
| РЕГУЛЯТОР ДАВЛЕНИЯ С РЕДУКТОРОМ СКОЛЬЖЕНИЯ | 2018 |
|
RU2715762C1 |
| НАСОСНЫЙ АГРЕГАТ | 2000 |
|
RU2191928C2 |
| Устройство для перемещения подвижного узла | 1976 |
|
SU729029A1 |
| СИСТЕМА ИМИТАЦИИ АКСЕЛЕРАЦИОННЫХ ВОЗДЕЙСТВИЙ ПОЛУНАТУРНОГО МОДЕЛИРУЮЩЕГО КОМПЛЕКСА ЭРГОНОМИЧЕСКОГО ПРОЕКТИРОВАНИЯ | 2024 |
|
RU2834755C1 |
| ПРИВОД ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2006 |
|
RU2339858C2 |


Изобретение относится к линейным исполнительным механизмам и может быть использовано в качестве силового привода в различных гидротехнических сооружениях и отраслях промышленности. Линейный исполнительный механизм содержит корпус, в котором размещен шток, имеющий возможность перемещаться вдоль своей оси и закрепленный от поворота посредством сегментной шпонки. Шариковинтовая передача установлена в штоке и связывает шток и корпус через винт шариковинтовой передачи с установленными на его конце гайкой и двумя обоймами. Обоймы имеют установленные роликовые сферические упорно-радиальные подшипники и шариковые радиально-упорные подшипники, причем винт соединен с электродвигателем через цилиндрический редуктор, между обоймами расположен пружинный демпфер, состоящий из тарельчатых пружин и опорных шайб, имеющих возможность взаимодействовать с тарельчатыми пружинами с каждой из сторон. Обеспечивается повышение надежности и ресурса, упрощение конструкции, улучшение технических характеристик, расширение функциональных возможностей. 3 з.п. ф-лы, 2 ил.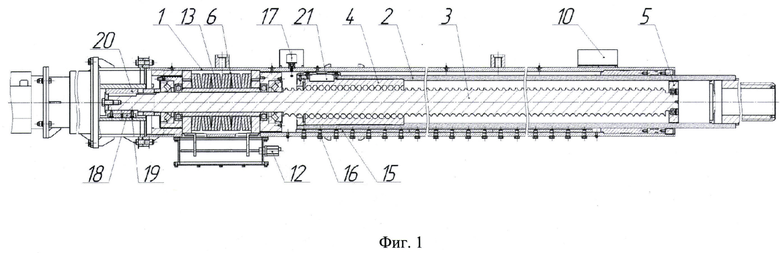
1. Линейный исполнительный механизм, содержащий корпус, в котором размещен шток, имеющий возможность перемещаться вдоль своей оси и закрепленный от поворота посредством сегментной шпонки, шариковинтовая передача, установленная в штоке посредством гайки шариковинтовой передачи и стопорной шпонки, связывающая шток и корпус через винт шариковинтовой передачи с установленными на его конце гайкой и двумя обоймами, обоймы имеют установленные роликовые сферические упорно-радиальные подшипники и шариковые радиально-упорные подшипники, причем винт соединен с электродвигателем через цилиндрический редуктор, между обоймами расположен пружинный демпфер, состоящий из тарельчатых пружин и опорных шайб, имеющих возможность взаимодействовать с тарельчатыми пружинами с каждой из сторон.
2. Линейный исполнительный механизм по п. 1, отличающийся тем, что демпфер содержит датчики перемещения тарельчатых пружин.
3. Линейный исполнительный механизм по п. 1, отличающийся тем, что винт с одной стороны опирается на шток через дополнительную скользящую опору, содержащую подшипник качения.
4. Линейный исполнительный механизм по п. 1, отличающийся тем, что винт соединен с цилиндрическим редуктором посредством подвижного шпоночного соединения.
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ, УЗЕЛ ШАССИ ЛЕТАТЕЛЬНОГО АППАРАТА, ЛЕТАТЕЛЬНЫЙ АППАРАТ И НАБОР ДЕТАЛЕЙ ДЛЯ ИЗГОТОВЛЕНИЯ ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА | 2007 |
|
RU2486104C2 |
| WO 2010061123 A1, 03.06.2010 | |||
| US 20120011951 A1, 19.01.2012 | |||
| JP 5164209 A, 29.06.1993. | |||

