Изобретение относится к строительной технике, а именно к устройствам для измерения макро- и микропрофилей мелиоратив- .ных. дорожных и других строительных объектов,
Целью изобретения является повышение точности.
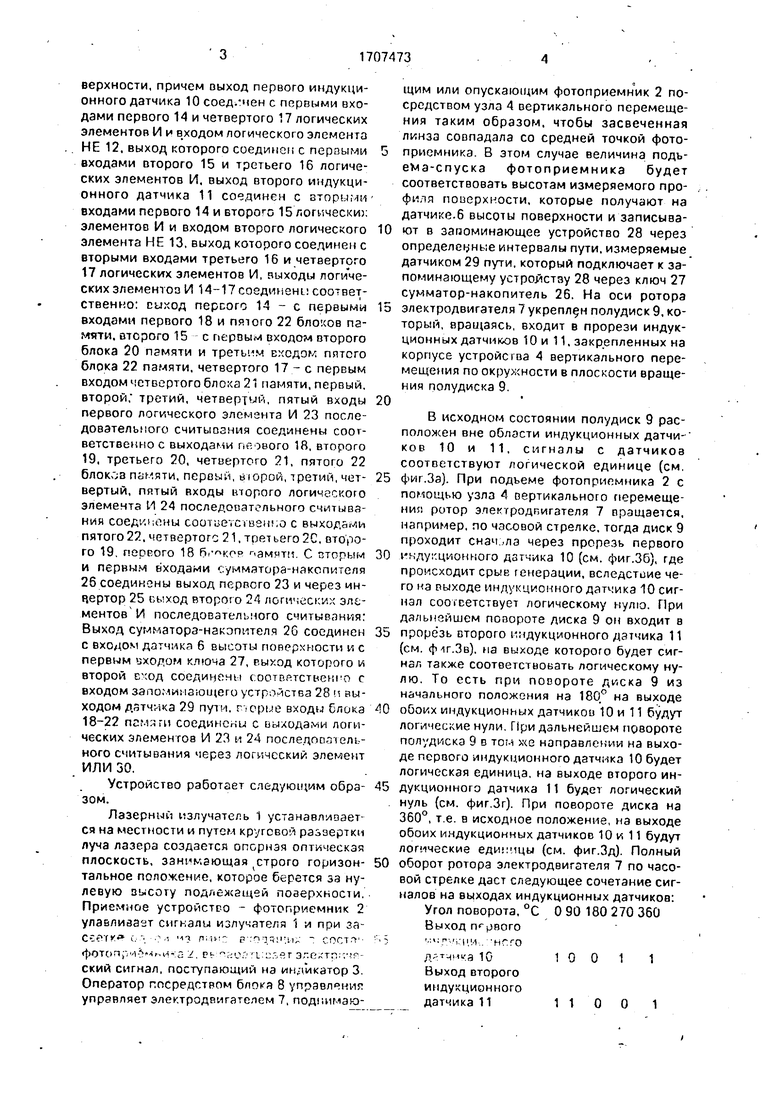
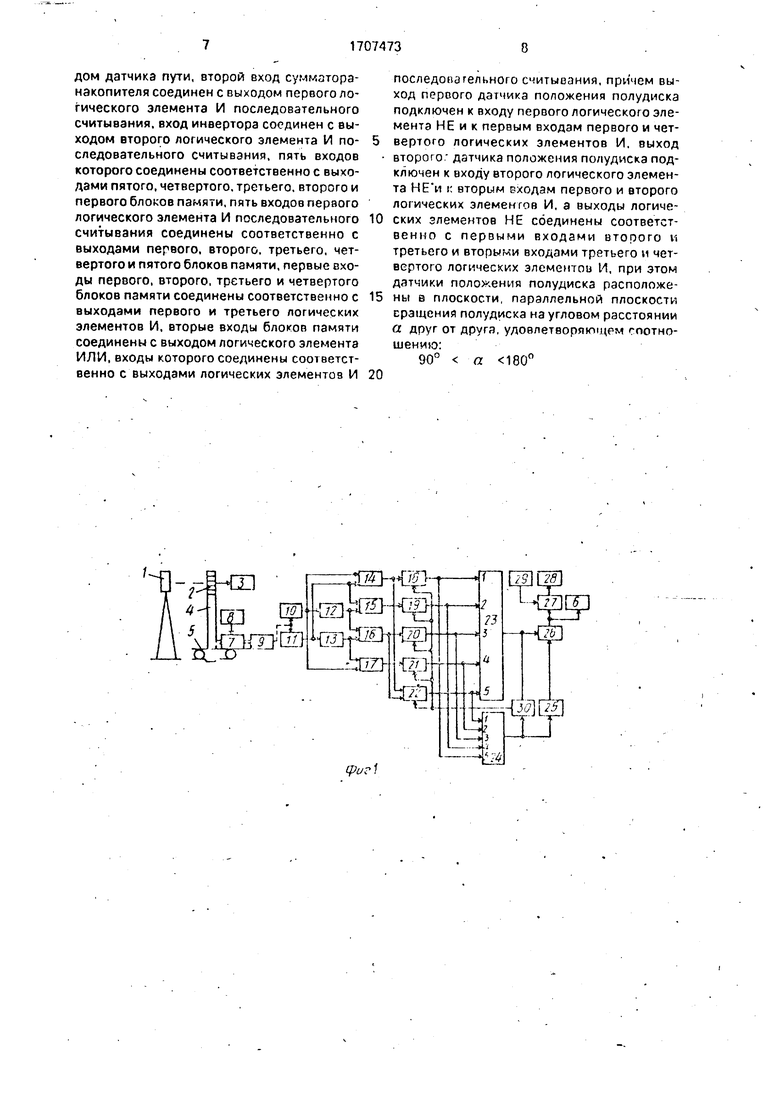
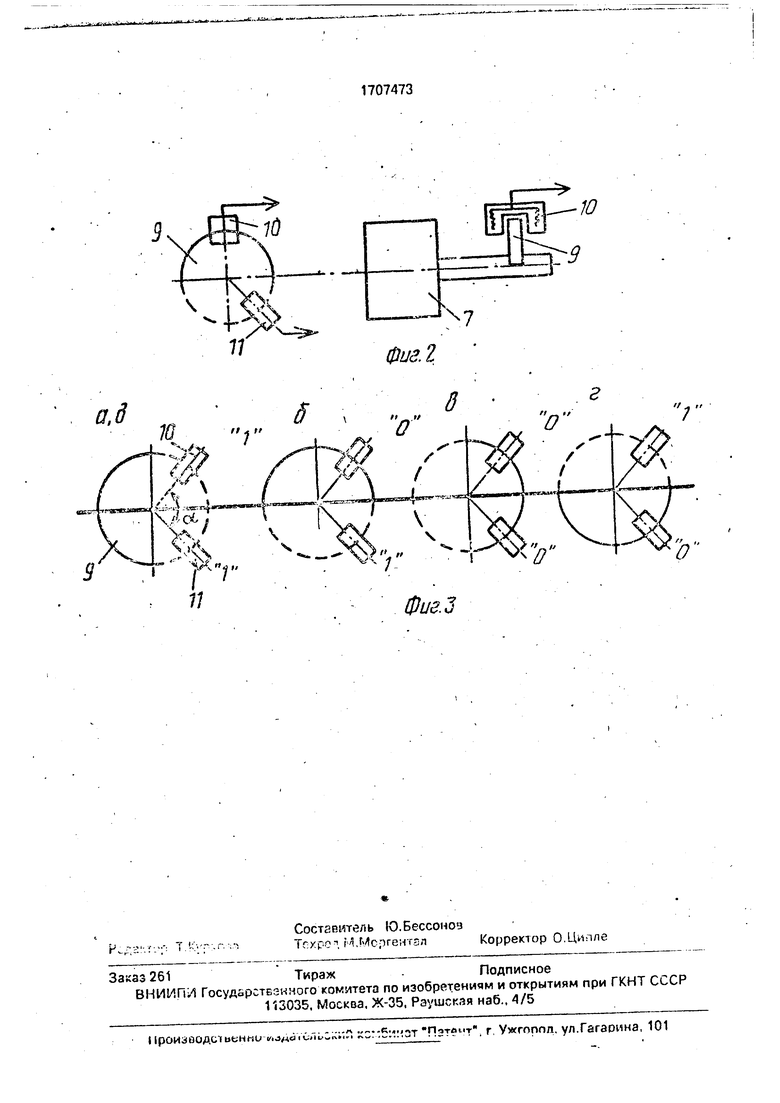
На фиг.1 представлена схема устройства; на фиг.2 - схема расположения диска и индукционных датчиков его положения; на фиг,3 - схема взаимного расположения ди- cijs и / - дусционнух д- тчнкоп зч один обоГ О t Т п Г Р тг г Г ; ;(
Лазерный профиле раф ссдкр ит излучатель 1, установленный на измеряемой местности, фотоприемник 2 с индикатором 3. размещенный на узле 4 вертикального перемещения, установленном на самоходной тя- лежке 5, датчик G зысоты поверхности, электродвигатель 7, приводимый в движение с блока 8 управления опера юром, на роторе электродвигателя 7 размещен полудиск 9. на корпусе узла А вертикального ния установлены первый 10 и второй 11 индукционные датчики положения полудиска, а также содержит первый 11 и второй 13 логические элементы НЕ; первый 14, второй 15, третий 16, четвертый 17 логические элементы , перг.. п 18. сторой 19, трети, - 20 ,:.. i пчтый 22 с.п .; п,-;т, ;, :, ; вый 23 и второй 24 логические элементы 1л последовательного считывания, инверсор 25, сумматор-накопитель 26, выход которого соединен с входом датчика 6 высоты поМ
О
ь м СА
верхности, причем оыход первого индукционного датчика 10 соединен с первыми входами первого 14 и четвертого 17 логических элементов И и входом логического элемента НЕ 12. выход которого соединен с пероыми входами второго 15 и третьего 16 логических элементов И. выход второго индукционного датчика 11 соединен с вторыми входами первого 14 и второго 15 логически): элементов И и входом второго логического элемента НЕ 13, выход которого соединен с вторыми входами третьего 16 и четвертого 17 логических элементов И, выходы логических злементоз И 14-17 соединена соответственно: сыход персого 14 - с первыми входами первого 18 и пятого 22 блоков памяти, второго 15с первым входом второго блока 20 памяти и третьим входом пятого блока 22 памяти, четвертого 17 - с первым входом четвертого блока 21 памяти, первый, второй, третий, четвертый, пятый входы первого логического элемента И 23 последовательного считывания соединены соответственно с выходами пеового 18, второго 19. третьего 20, четвертого 21, пятого 22 блоков памяти, первый, вчорой, третий, четвертый, пятый входы второго логического элемента И 24 последовательного считывания соединены соответственно с выходами пятого 22.четвертого 21,третьего2С,второго 19, первого 18 амяти. С вторым и первым входами сумматора-накопителя 26 соединены выход первого 23 и через инвертор 25 сыход второго 24 логических элементов И последовательного считывания: Выход сумматора-накопителя 2G соединен с входом датчика 6 высоты поверхности и с первым входом ключа 27, сыход которого и второй вход соединены соотвйтствеш о с входом запоминающего устройства 28 п выходом датчика 29 пути, mcpue входы блока 18-22 пгмзги соединены с выходами логических элементов И 23 и 24 последовательного считывания через логический элемент ИЛИ 30.
Устройство работает следующим образом.
Лазерный излучатель 1 устанавливается на местности и путем круговой развертки луча лазера создается опорная оптическая плоскость, занимающая (строго горизонтальное положение, которое берется за нулевую высоту подлежащей поаерхности. Приемное устройстс-о - фотоприемник 2 ула&лизазт сигналы излучателя 1 и при заСООТК О . -O l M . СОСТЛ1
фотопри мг.и-а v. . /п.гяг эг.ехтричр- ский сигнал, поступающий на индикатор 3. Оператор посредством блок-я 8 управления управляет электродвигателем 7, поднимающим или опускающим фотоприемник 2 посредством узла 4 вертикального перемещения таким образом, чтобы засвеченная линза совпадала со средней точкой фотоприемника. В этом случае величина подь- ема-спуска фотоприемника будет соответствовать высотам измеряемого профиля поверхности, которые получают на датчике.6 высоты поверхности и записыва0 ют в запоминающее устройство 28 через определенные интервалы пути, измеряемые датчиком 29 пути, который подключает к запоминающему устройству 28 через ключ 27 сумматор-накопитель 26. На оси ротора
5 электродвигателя 7 укреплен полудиск 9, который, вращаясь, входит в прорези индукционных датчиков 10 и 11.закрепленных на корпусе устройства 4 вертикального перемещения по окружности в плоскости вращения полудиска 9.
0
В исходном состоянии полудиск 9 расположен вне области индукционных датчи- ков 10 и 11, сигналы с датчиков соответствуют логической единице (см,
5 фиг.За). При подъеме фотоприемника 2 с помощью узла А вертикального перемещения ротор электродвигателя 7 вращается, например, по часовой стрелке, тогда диск 9 проходит сначала через прорезь первого
0 .индукционного датчика 10 (см. фиг.36), где происходит срыв генерации, вследствие чего на пыходе индукционного датчика 10 сигнал соответствует логическому нулю. При дальнейшем повороте диска 9 он входит в
5 прорезь второго индукционного датчика 11 (см. фчг.Зв), на выходе которого будет сигнал также соответствовать логическому нулю. То есть при повороте диска 9 из начального положения на 180° на выходе
0 обоих индукционных датчиков 10 и 11 будут логические нули. При дальнейшем повороте полудиска 9 в том же направлении на выходе первого индукционного датчика 10 будет логическая единица, на выходе второго ин5 дукционного датчика 11 будет логический
. нуль (см. фиг.Зг). При повороте диска на
360°, т.е. в исходное положение, на выходе
обоих индукционных датчиков 10 и 11 будут
логические единицы (см. фиг.Зд). Полный
0 оборот ротора электродвигателя 7 по часовой стрелке даст следующее сочетание сигналов на выходах индукционных датчиков: Угол поворота, °С 090180270360
100 1
1100 1
При повороте ротора электродвигателя 7 против часовой стрелки на полный оборот будет следующее сочетание сигналов на выходах индукционных датчиков:
Угол поворота. °С 090180 270 360
Выход первого
индукционного
датчика 101 1. О 0 1
Выход второго
индукциоьного
датчика 11100 11
Отсюда ЕИДНО, что го сочетанию сигналов с индукционных датчиков 10 и 11 можно определить не только то, что ротор электродвигателя совершил полный оборот, но сразу же с первого оборота без запаздывания по воемени - направление вращения. Определения указанного выше логического сочетание сигналов с индукционных датчиков 10 и 11 реализуются схемой (фиг.1). Сигналы с первого индукционного датчика 10 поступают на логические элементы М 14 и 17 и НЕ 12, а с второго индукционного датчика 11 - на логические . И 14 и 15 и НЕ 13. Нэ выходе первого логического элемента И 14 присутствует сигнал, в случае сочетания обеих логических единиц с обоих индукционных датчике ; 10 и 11, на выходе второго логического злемонто И 15 присутствует сигнал, в с/г/чае ло; веского нуля на выходе первого индукционного датчика 10 и логической единицы - на выходе второго индукционного датчика 11.
Нэ выходе третьего логического элемента И 16 присутствует сигнал е случае логических Н;Г.ей н-т пыходе обоих индукционных датчиков 10 и 11. На выходе четвертого логического элемента И 17 присутствует сигнал в случае логической единицы из выходе первого индукционного датчика 10 и логического нуля на выходе второго индукционного датчика 11.
Сигналы со всех логических элементов И 14-17 запоминаются на соответствующих четырех блоках памяти 18-21. На пятом блоке памяти 22 сигнал с блоха 14 запоминается только Б том случае, если присутствует сигнал на выходе блока 16, свидетельствующий о том, что ротор электродвигателя 7 совершил оборот па 180°, который подается на третий вход пятого блока 22 памяти для разрешения записи.
Сигналы с блоков памяти 18-22 поступают н.ч 23 :i яторсй л логические inriv T j И . i1--1 .; -р г;ть|;э нчя ПО БХСДЗ i С Г|ЈрНОГО ПО Г.ЯТЫ Б СООТосГСТвующем порядке, указанном выше.
Сигнал на выходе блока 23 свидетельствует о том, что ротор электродвигателя 7 совершил один оборот по часовой стрелке.
этот сигнал поступает на первый вход сумматора-накопителя 26 для увеличения сигнала, соответствующего высоте поверхности.
Сигнал на выходе блока 24 свидетельст- 5 вует о том, что ротор электродвигателя 7 совершил один оборот против часовой стрелки и этот сигнал поступает через ин вертор 25 на второй вход сумматора-накопителя 26 для уменьшения сигнала,
0 соответствую .цего высоте поверхности. Выходы обоих логических элементен И 23 и 24 последовательного считывания соединены с вторыми входами блока памяти через логический элемент ИЛИ 30 для сброса содер5 жимого этих блоков в случае присутствия сигналов на выходе блоков 23 или 24, т.е. в случае совершения одного оборота блоки памяти освобождаются для записи следующих сочетаний сигналов. С суммзтора-нако0 пителя 26 сигнал, соответствующий текущей высоте, поступает на датчик S высоты поверхности и на запоминающее устройство 28 через определенный интервал пути для формирования высотной карты ме5 стности, что осуществляется при помощи замыкания ключа 27 сигналом с измерителя 29 путевых интервалов.
Устройство позволяот измерятк профиль любой ыысоты, так как высота переме0 щения. характеризующая высоту поверхности, не ограничена количеством фотоприемникоэ, а определяется только возможностями (конструкцией) подъемного узла.
5
ормула изобретения
Лазерный профи/югрзф. содержащий излучатель, самоходную тэлежку, на кото0 рой установлены фотоприемник, выполненный с эозможностью вертикального перемещения, измеритель перемещения фотоприемника, связанный с валом электродвигателя, датчик пути и блок обработки,
5 отличающийся тем, что, с целью повышения точности, измеритель перемещения фотоприемника выполнен в виде полудиска, закрепленного на валу электро-, двигателя и двух датчиков положения пол0 удиска, блок обработки выполнен в вида первого, второго, третьего и четвертого логических элементов И, первого и второго логических элементов И последовательного
IT ui r i и м-л р f r, pr- rrs ч rvf . р
Ч. . i J .. . ..II, t t , s LJ -, . J v. J . с. f - t I ч .,....,
G j/iCMOHTOB , iiepaoio, Biuporo, ipeiberu, четвертого и пятого блоков памяти и последовательно соединенных инвертора, сумматора-накопителя, ключа и запоминающего блока, второй вход ключа соединен с выходом датчика пути, второй вход сумматора- накопителя соединен с выходом первого логического элемента И последовательного считывания, вход инвертора соединен с выходом второго логического элемента И последовательного считывания, пять входов которого соединены соответственно с выходами пятого, четвертого.третьего, второго и первого блоков памяти, пять входов первого логического элемента И последовательного считывания соединены соответственно с выходами первого, второго, третьего, четвертого и пятого блоков памяти, первые входы первого, второго, третьего и четвертого блоков памяти соединены соответственно с выходами первого и третьего логических элементов И, вторые входы блоков памяти соединены с выходом логического элемента ИЛИ, входы которого соединены соответственно с выходами логических элементов И
последовательного считывания, причем выход первого датчика положения полудиска подключен к входу первого логического элемента НЕ и к первым входам первого и четвертого логических элементов И. выход второго, датчика положения полудиска подключен к входу второго логического элемента НЕ и к вторим входам первого и второго логических элементов И, а выходы логических элементов НЕ соединены соответственно с первыми входами второго и третьего и вторыми входами третьего и четвертого логических элементов И, при этом датчики положения полудиска расположены в плоскости, параллельной плоскости сращения полудиска на угловом расстоянии а друг от друга, удовлетворяющем соотношению:
90° а 180°
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ РАДИОПЕЛЕНГАТОР | 1999 |
|
RU2149419C1 |
| Устройство для измерения параметров вращения ротора в переходных режимах | 1983 |
|
SU1352369A1 |
| Устройство для сопряжения процессора с памятью | 1982 |
|
SU1059560A1 |
| Система регулирования подачи топлива транспортного дизеля | 1986 |
|
SU1348549A1 |
| Способ определения зависимости баллистических характеристик снарядов от режима стрельбы и информационно-вычислительная система для его осуществления | 2017 |
|
RU2661073C1 |
| СЧЕТЧИК ЭЛЕКТРОЭНЕРГИИ | 1996 |
|
RU2106644C1 |
| Устройство для определения области работоспособности электронных схем | 1985 |
|
SU1273853A1 |
| ЗАПОМИНАЮЩЕЕ УСТРОЙСТВО С РЕЗЕРВИРОВАНИЕМ | 1990 |
|
RU2024969C1 |
| ЗВЕЗДНЫЙ ДАТЧИК ДЛЯ КОСМИЧЕСКОГО АППАРАТА В РЕЖИМЕ ЗАКРУТКИ | 1988 |
|
SU1623374A1 |
| Устройство для магнитной записи-воспроизведения речевых сигналов | 1990 |
|
SU1739384A1 |
Изобретение относится к устройствам для измерения профиля мелиоративных, дорожных, и других объектов, Излучатель 1 устанавливается из измеряемой местности, фотоприемн 1к.2 с индикатором 3 размещается на узле 4 вертикалы,ого перемещения, установленном на самоходной тележке 5. Узел 4 вертикального-перемещения приводится в движение оператором до тех пор, пока центр фото приемника 2 не совпадает с лазерной плоскостью излучателя 1. На налу электродвигателя 7 установлен полудиск 9, по окружности вращения которого устгчов- лены индукционные датчики 10 и 11, сигналы с которых при каждом oc-ороте вала электродвигателя 7 снимаются, обрабатываются логическими блоками 12-25 и суммируются на сумматоре-накопителе 25. Предложен 1.1й съем и обработка информации о подъеме-спуске фотоприсмни:-ог-, характеризующих высоту поверхности,- пс ышает точность и увеличивает диапазон измерений. 3 ил. Ь f.n уетт IV-
{цдж}
ЪгЈЩ
SUD-HDjpфи 1
1707473
ЕлГ.;0
Шла
9
Фив. 2
Фиг.З
| Скпозскмй А.А | |||
| и Гря;.ев К.Н Новейшие системы автоматизации дорожно-строительних машин | |||
| Р;ТЙ: Редакцмомно-иэдательский отдел ММПКСИХ Латв | |||
| ССР, с | |||
| Способ крашения тканей | 1922 |
|
SU62A1 |
