1
Изобретение относится к области строительства, в частности, к контролю и измерению высотных координат рабочих органов землеройно-транопортных машин.
Известны устройства лазерного контроля высотных координат, применяемые е строительстве, излучатель выполнен в виде оптического квантового генератора, при, этом на объекте контроля устанавливаются га фотоприемников, к каждому из которых подключен собственный усилитель с системой индикации, блоки усиления установлены на штанге, привод укреплен на рабочем органе.
Цель изобретения - обеспечить непрерывность контроля высотных координат рабочих органов землеройно-транспортных машин при резких изменениях профиля почвы.
Для этого штанга выполнена с возможностью воэвратно-врагдательного движения относительно оси привода, установленного соосно с датчиком положения, выполненным В виде кругового потенциометра.
На рабочем органе объекта контроля установлен привод, к валу которого с помощью штанги прикреплен фотоприемник с блоком усиления и датчик положения фотоприеминка, при этом вход цифрового регистратора соединен с выходом датчика положения фотоприемника, а выход усилителя фотоприемника соединен через последовательно включенные блок формирования и блок запуска с входом запуска регистратора. Для обеспечения фотоприемнику возвратно-вращ,ательцого движения по вертикали сверху и снизу установлены конечные выключатели, которые осушествляют реверс привода. Для осуществления пропорционального линейного контроля высотных координат напряжение питания датчика положения фотоприемника -выбрано таким, что оно численно равпо удвоенному расстоянию фотоприемника до оси -вала привода. Для цифровой регистрации применяется цифровой вольтметр, а блок запуска выполнен в виде электронного ключа.
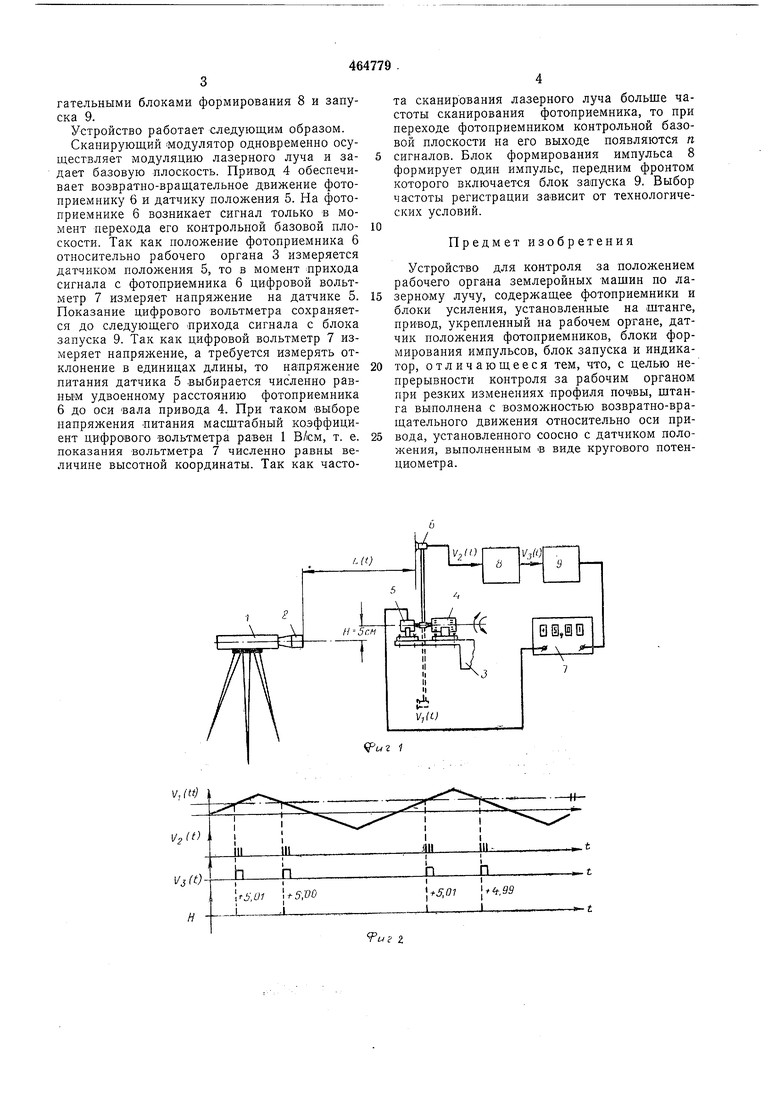
На фиг. 1 изображена структурная схема предлагаемого устройства; на фиг. 2-временная диаграмма работы элементов устройства.
На пункте контрольной базы устанавливается оптический квантовый генератор 1, на выходе которого устанавливается телескопическая система со сканирующим модулятором 2. На рабочем органе 3 объекта контроля установлен привод 4 и датчик положения 5. К валу привода с помощью штанги крепится фотоприемник 6 с блоком усиления. В крайних положениях фотоприемника 6 крепятся конечные выключатели, например по вертикали снизу и сверху. На лицевой панели объекта крепится цифровой вольтметр 7 со вспомогательными блоками формирования 8 и запуска 9.
Устройство работает следующим образом.
Сканирующий модулятор одновременно осуществляет модуляцию лазерного луча и задает базовую плоскость. Привод 4 обеспечивает возвратно-вращательное движение фотоприемнику 6 и датчику положения 5. На фотоприемнике 6 возникает сигнал только в момент перехода его контрольной базовой плоскости. Так как положение фотоприемника 6 относительно рабочего органа 3 измеряется датчиком положения 5, то в момент прихода сигнала с фотоприемника 6 цифровой вольтметр 7 измеряет напряжение на датчике 5. Показание цифрового вольтметра сохраняется до следующего прихода сигнала с блока запуска 9. Так как цифровой вольтметр 7 измеряет напряжение, а требуется измерять отклонение в единицах длины, то напряжение питания датчика 5 выбирается численно равным удвоенному расстоянию фотоприемника 6 до оси вала привода 4. При таком выборе напряжения питания масштабный коэффициент цифрового вольтметра равен 1 В/см, т. е. показания вольтметра 7 численно равны величине высотной координаты. Так как частота сканирования лазерного луча больше частоты сканирования фотоприемника, то при переходе фотоприемником контрольной базовой плоскости на его выходе появляются п сигналов. Блок формирования импульса 8 формирует один импульс, передним фронтом которого включается блок запуска 9. Выбор частоты регистрации зависит от технологических условий.
Предмет изобретения
Устройство для контроля за положением рабочего органа землеройных машин по лазерному лучу, содержащее фотоприемники и блоки усиления, установленные на штанге, привод, укрепленный на рабочем органе, датчик положения фотоприемников, блоки формирования импульсов, блок запуска и индикатор, отличающееся тем, что, с целью непрерывности контроля за рабочим органом при резких изменениях проф)иля почвы, штанга выполнена с возможностью возвратно-вращательного движения относительно оси привода, установленного соосно с датчиком положения, выполненным в виде кругового потенциометра.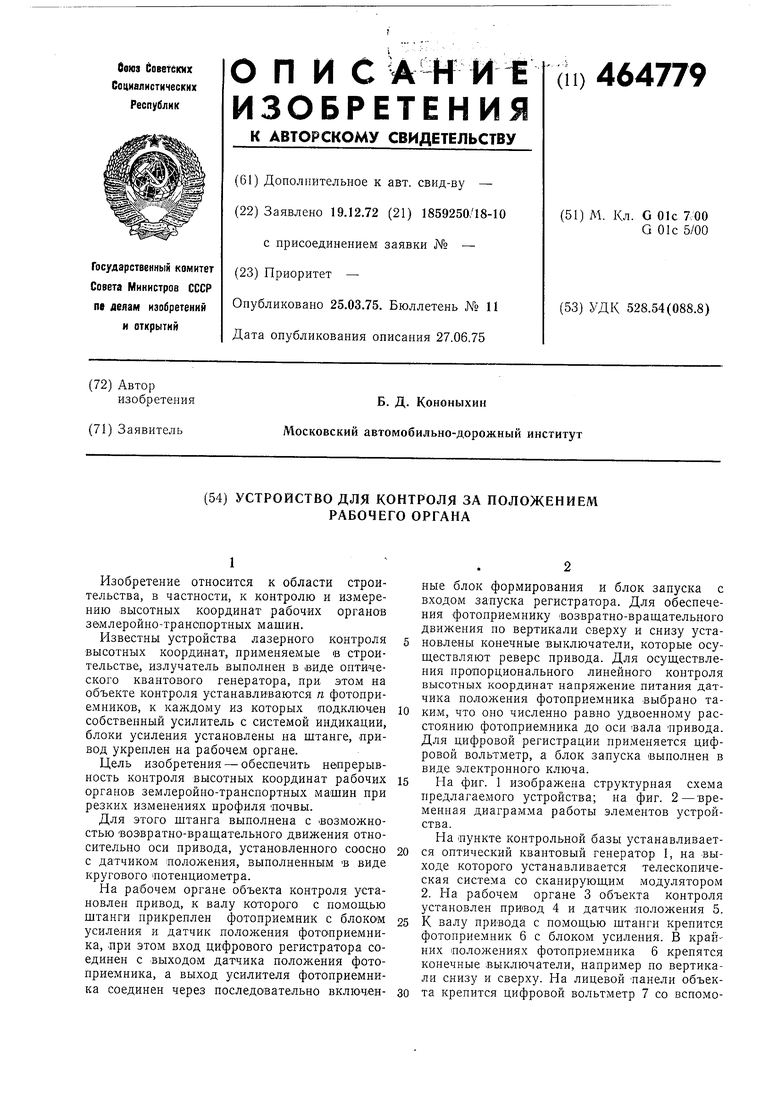
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СТРОИТЕЛЬНОЙ МАШИНОЙ | 1994 |
|
RU2089708C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ РАБОЧЕГО ОРГАНА ДОРОЖНО-СТРОИТЕЛЬНОЙ МАШИНЫ С ПОМОЩЬЮ СПУТНИКОВЫХ СИСТЕМ НАВИГАЦИИ GPS/ГЛОНАСС ИЛИ СВЕТОВЫХ, НАПРИМЕР ЛАЗЕРНЫХ, ИЗЛУЧАТЕЛЕЙ | 2011 |
|
RU2465410C1 |
| Система управления курсом движения землеройных машин | 1989 |
|
SU1647092A1 |
| Датчик высотного положения рабочего органа землеройной машины (его варианты) | 1984 |
|
SU1208151A1 |
| Система управления рабочим оборудованием землеройной машины | 1981 |
|
SU953121A1 |
| ЛАЗЕРНЫЙ ПРОФИЛОГРАФ | 2001 |
|
RU2227898C2 |
| Датчик пути | 1990 |
|
SU1788164A1 |
| Датчик высотного положения недоступной точки рабочего органа землеройной машины | 1987 |
|
SU1587148A1 |
| ПРИЕМОПЕРЕДАЮЩЕЕ УСТРОЙСТВО ЛАЗЕРНОГО ЛОКАТОРА | 1986 |
|
RU2048686C1 |
| СИСТЕМА УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 2014 |
|
RU2572434C1 |
