Известны дорожные профилографы, основанные на определении величины мгновенной скорости обкатывающего профиль дороги колеса с последующим ее разложением на курсовом гироблоке по двум направлениям географических координат. Недостатком их является то, что они не позволяют получать координаты точек пройденного пути.
Предлагаемое устройство не имеет этого недостатка и в отличие от всех существующих дорожных профилографов позволяет получать истинную горизонтальную и истинную вертикальную составляющие мгновенной скорости оси обкатывающего колеса, что дает возможность получать географические координаты и превыщения точек пройденного пути.
Основным отличием предлагаемого дорожного профилографа является то, что в его обкатывающем колесе применена двойная эксцентричная ось, которая в сочетании с гировертикалью обеспечивает получение составляющих мгновенной скорости обкатывающего колеса в вертикальном и горизонтальном направлениях. Применение дополнительного интегратора для интегрирования вертикальной составляющей скорости колеса позволяет получить третью координату (превытнение) и создать, таким образом, кинематическую схему трехкоординатпого дорожного профилографа, точность которого выше точности известных устройств подобного рода.
№ 123721
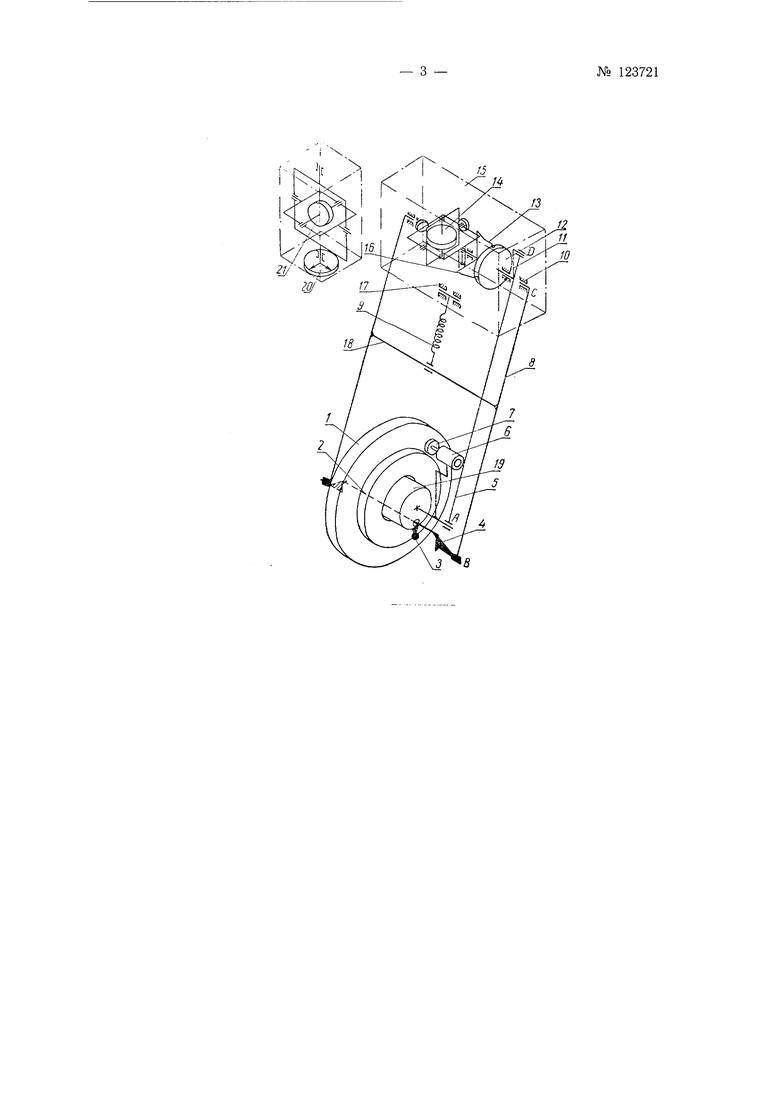
Кинематическая схема автоматического трехкоординатного дорожного профилографа -показана на чертеже.
Ходовая часть прибора состоит из следующих основных частей: обкатывающего колеса /, редуктора 2 и 7, уравновешивающего груза 3, двойной эксцентричной оси 4, 19, тяги 5, тахогенератора 6, ведущей рамы 8, пружины 9, шарниров 10, рычажного механизма //, синуснокосинусного потенциометра 12, токосъемных устройств 13, 16, трехстепенного гироскопа с корректирующими моторами для приведения оси гироскопа 14 к вертикали, корпуса /5 ходовой части, шарнира 17, распорной балки 18.
В рабочем положении ходовая часть своим корпусом 15 крепится к раме подвижного объекта (тягача, автомашины и т. п.). Рама 8 прибора крепится шарниром 10 к корпусу 15 и имеет приспособление для жесткого крепления в ней оси 4, на которой шарнирно крепится ось 19, с колесом /, редуктором 2, 7, тахогенератором 6 и уравновешивающим грузом 3.
Под действием пружины 9, закрепленной в шарнире 17, рама 8 имеет возможность, проворачиваясь в шарнирах 10, прижимать колесо к поверхности дороги. Линия, соединяющая центры шарниров АВ, совпадает с нанравлением нормали к поверхности дороги в точке касания колеса /. При помощи тяги 5 направление АВ передается рычагу 11, который устанавливается также по направлению нормали к поверхности дороги, так как рычаги АВ и СД составляют противоположные стороны параллелограмма. На рычаге // соосно с шарниром 10 жестко посажен синусно-косинусный -потенциометр 12, который также устанавливается по нормали к грунтз Гироскопический узел 14 с корректирующими моторами задает земную вертикаль и щетки токосъемных устройств 13, 16, жестко связанные с наружной рамкой гироузла и расположенные под углом 90° по отнощению друг к другу, соответственно находятся в вертикальной и горизонтальной плоскости.
На функциональном потенциометре происходит умножение сигнала, пропорционального мгновенной скорости движения колеса, на синус и косинус угла 1между касательной к профилю дороги и горизонтальной плоскостью. Сигнал горизонтальной, составляющей мгновенной скорости оси обкатывающего колеса подается на синусно-косинусный потенциометр 20 курсового гироскопа 21. Корпус синусно-косинусного потенциометра 20 устанавливается строго согласованно с плоскостью качения колеса /. Сам курсовой гироскоп с потенциометром может быть установлен в любом месте объекта вдали от ходовой части прибора либо на корпусе 15 ходовой части. На синусно-косинусном потенциометре курсового гироскопа производится умножение сигнала горизонтальной скорости колеса на синус и косинус угла между касательной к профилю дороги и горизонтальной плоскостью (курсовой угол), т. е. определяются составляющие истинной горизонтальной скорости по осям географических координат. После интегрирования этих составляющих в интегрирующем блоке получают географические координаты объекта, а после интегрирования вертикальной составляющей, скорости оси колеса специальным добавочным интегратором получают относительное превышение объекта над пунктом установки исходных координат.
Предмет изобретения
Дорожный профилограф по авт. св. № 120014, отличающийся применением ведущей оси с двумя эксцентриками на ходовом колесе для автоматического определения географических координат и превышений точек пройденного пути.
| название | год | авторы | номер документа |
|---|---|---|---|
| Дорожный профилограф | 1958 |
|
SU120014A1 |
| Способ определения параметров ориентации объекта при помощи полуаналитической инерциальной навигационной системы с географической ориентацией осей четырехосной гироплатформы | 2022 |
|
RU2782334C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УКЛОНОВ, КРИВИЗНЫ, НЕРОВНОСТИ И КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ ДОРОЖНОГО ПОКРЫТИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2162202C1 |
| Устройство для регистрации скорости прямолинейного движения наземного объекта | 1959 |
|
SU127483A1 |
| ПРОФИЛОГРАФ | 1972 |
|
SU425045A1 |
| Способ определения ровности покрытия автомобильных дорог | 2023 |
|
RU2832694C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УКЛОНОВ ПРОФИЛЯ ПОВЕРХНОСТИ АЭРОДРОМНЫХ ПОКРЫТИЙ | 2015 |
|
RU2592930C1 |
| КУРСОВАЯ СИСТЕМА | 2004 |
|
RU2279636C1 |
| Устройство для измерения профиля местности | 1987 |
|
SU1571394A1 |
| Профилограф | 1974 |
|
SU510559A1 |