Предлагаемое техническое решение относится к области оптического приборостроения, в частности к коллиматорным визирным устройствам, и может быть использовано при разработке оптико-электронных систем визирования и прицеливания, в том числе при определении разворотов защитного шлема оператора в различных областях науки и техники.
Все известные коллиматорные визиры строятся на базе полупрозрачного отражателя, который установлен между глазом наблюдателя и пространством визирования, объектива и марки (сетки), размещенной в фокальной поверхности объектива.
Анализ известных аналогов показывает, что все структурные схемы построения коллиматорных визиров можно классифицировать по типу применяемых объективов:
- линзовый (см. Л.П. Лазарев. "Оптико-электронные приборы наведения", Москва, Машиностроение, 1989 г., с.247-250);
- зеркальный (см. указанную выше книгу Л.П. Лазарева, с.250-253);
- зеркально-линзовый (см. В.Т. Бородин, Г.И. Рыльский. "Пилотажные комплексы и системы управления самолетов и вертолетов", Москва, Машиностроение, 1978 г., с.151-152).
Рассматривая известные аналоги по функциональному назначению, можно отметить, что коллиматорные визиры применяются в следующих вариантах:
- автономно с использованием собственной системы отсчета углов визирования (см. Л.П. Лазарев. "Оптико-электронные системы наведения", Москва, Машиностроение, 1989 г., с.247-250), заявку с положительным решением Украины №95020874 от 24.02.95 г.);
- в комплексах визирования с разделением функций визирования (задание нулевой линии визирования, разворот линии визирования, отсчет углов визирования) для выполнения их различными системами комплекса (см. патент США №3375375).
Применительно к коллиматорному визиру без установки его на объект автономная система отсчета углов визирования представляет собой декартовую систему координат, оси которой определенным образом связаны с оптической осью. Например, одна из осей совпадает с оптической осью, а две другие перпендикулярны ей, что определяется функциональным назначением визира.
В представленных материалах рассматривается система отсчета углов визирования (или некоторая промежуточная система для стабилизации), оси которой формируют плоскости отсчета следующим образом:
- две горизонтальные оси системы отсчета образуют горизонтальную плоскость, параллельную плоскости Земли;
- вертикальная ось перпендикулярна горизонтальной плоскости и является пересечением двух вертикальных плоскостей, перпендикулярных плоскости Земли и проходящих через первую и вторую горизонтальные оси соответственно.
При этом следует отметить, что стабилизация системы отсчета в общем случае представляет собой обеспечение неизменности в пространстве ее ориентации относительно Земли.
Анализ существующих аналогов автономного применения с использованием собственной системы отсчета показывает, что ни в одном из известных коллиматорных визиров не применена стабилизация системы отсчета при построении углов визирования.
При этом следует отметить, что при применении коллиматорного визира в зависимости от функционального назначения может быть применена частичная стабилизация системы отсчета углов визирования, т.е. стабилизация одной плоскости.
Например, в случае применения коллиматорного прицела для охотничьего ружья (см. заявку с положительным решением Украины №95020874 от 24.02.95 г.) достаточно стабилизации одной плоскости для правильного учета прицельной поправки, а в случае применения стабилизации к схеме, описанной в книге Л.П. Лазарев. "Оптико-электронные системы наведения", Москва, Машиностроение, 1989 г., с.247-250, необходима стабилизация всей системы.
Отсутствие же стабилизации приводит к тому, что при установке коллиматорного визира на подвижное основание или транспортное средство возникает необходимость в непрерывной корректировке величины углов визирования с учетом текущих разворотов и колебаний объекта.
Таким образом, для поддержания неизменным направления визирного луча в пространстве относительно Земли необходимо производить целый ряд измерений и расчетов.
Так, в оптической схеме (см. книгу Л.П.Лазарев. "Оптико-электронные системы наведения", Москва, Машиностроение, 1989 г., с.247-250) на зеркало, отклоняющее прицельную марку в системе отсчета коллиматорного визира, передаются углы, откорректированные с учетом всех колебания подвижного основания. Учитывая жесткую установку визира на подвижном основании, колебания подвижного основания являются колебаниями и системы отсчета углов визирования, т.е. система отсчета не стабилизирована. В связи с этим и требуется непрерывная корректировка углов визирования с применением аппаратуры, измеряющей колебание в свободном пространстве, связанном с Землей.
В более простых схемах автономного применения, например, в коллиматорном прицеле, разработанном для охотничьего ружья (см. заявку с положительным решением Украины №95020874 от 24.02.95 г.) система отсчета углов прицеливания (визирования) также не стабилизирована. При этом, в связи с малогабаритностью всей системы, невозможна корректировка текущих углов визирования для компенсации колебаний системы отсчета. В данном случае точность стрельбы с применением нестабилизированного прицела зависит в значительной мере от точности ориентации системы отсчета в свободном пространстве, связанном с Землей, т.е. от навыков и опыта самого стрелка.
В сложных системах, таких как комплексы визирования с разделением функций визирования (см. патент США №3375375) функциональные задачи решаются следующим образом:
- задание нулевой линии визирования - коллиматорным визиром в собственной системе отсчета;
- разворот линии визирования - с помощью головы оператора при жесткой установке коллиматорного визира на шлеме оператора;
- формирование углов визирования - с помощью электронных следящих систем, дистанционно определяющих положение опорных элементов, расположенных на шлеме оператора, а вместе с тем и ориентацию нулевой линии коллиматорного визира в пространстве.
В данном случае, как и в описанных ранее автономных системах визирования, система отсчета углов визирования не стабилизирована, что обуславливает необходимость непрерывной корректировки этих углов с учетом колебаний объекта установки.
Таким образом, как показывает проведенный анализ, одним из существенных недостатков коллиматорных визиров является отсутствие собственной малогабаритной стабилизации системы отсчета углов визирования.
Устранение указанного недостатка в настоящее время очень актуально, т.к. снимает необходимость применения специальных вычислительных устройств и датчиков для измерения колебаний объекта установки таких визиров, чем расширяет область применения коллиматорных визиров, повышает точность определения углов визирования и дает возможность оператору работать в свободном пространстве, связанном с Землей.
Наиболее близким по техническому решению из известных аналогов является коллиматорный визир с линзовым объективом, описанный в книге Л.П. Лазарев. "Оптико-электронные приборы наведения", Москва, Машиностроение, 1989 г., с.247-250.
Данное устройство выбрано за прототип. Устройство состоит из следующих составных частей:
- полупрозрачный отражатель;
- объектив;
- блок ввода марки;
- полупрозрачное зеркало;
- устройство отклонения марки визира.
При этом блок ввода марки исполняется, как обычно, состоящим из лампы подсвета, матового стекла и сетки-марки, нанесенной на специальном стекле.
Устройство отклонения подвижной марки на углы визирования представляет собой измерительный гироскоп, связанный с вычислительными блоками системы объекта установки, с закрепленным на его оси зеркалом.
Устройство-прототип работает следующим образом. Оператор через полупрозрачный отражатель наблюдает цель и изображение марки визира, которое проецируется в поле зрения оператора с помощью блока ввода марки, полупрозрачного зеркала, устройства отклонения марки визира, объектива и отражателя.
Для наложения марки на цель необходимо изменить положение ее в системе отсчета коллиматорного визира по двум направлениям:
- по углу разворота в горизонтальной плоскости ϕГ;
- по углу разворота в вертикальной плоскости ϕВ.
Такое отклонение марки визира производится с помощью блока отклонения в результате подачи напряжения, пропорционального углам визирования ϕГ и ϕВ на обмотки измерительного гироскопа.
При этом, как указывалось выше, в связи с отсутствием автономной стабилизации отсчетной системы коллиматорного визира производится непрерывное вычисление углов ϕГ, ϕВ с учетом колебаний этой системы, обусловленных колебаниями и разворотами объекта установки, т.е. происходит не стабилизация системы отсчета, а косвенная стабилизация углов визирования за счет непрерывной их корректировки в результате трудоемких вычислительно-измерительных операций.
Анализ описанного устройства показывает, что рассматриваемый коллиматорный визир не может работать автономно, а только в комплексе с вычислительными блоками объекта установки.
Таким образом устройству-прототипу присущи следующие недостатки;
- отсутствие автономной стабилизации системы отсчета углов визирования, обеспечивающей работу оператору в свободном пространстве, связанном с Землей;
- применение большого количества вычислительных операций с использованием измерительных устройств на объектах установки, что понижает точность определения углов визирования.
В предлагаемом изобретении решалась задача создания коллиматорного визира с обеспечением автономной стабилизации системы отсчета углов визирования в свободном пространстве, связанном с Землей.
Решение поставленной задачи достигается тем, что в известное устройство визирования, а именно в коллиматорный визир, дополнительно вводится блок стабилизированных и контрольных меток, в результате совмещения которых и осуществляется стабилизация системы отсчета углов визирования, что в отличие от прототипа позволяет оператору работать в свободном пространстве, связанном с Землей, и не производить пересчет углов визирования при колебаниях объекта установки.
Сущность заявляемого изобретения состоит в том, что в коллиматорный визир, содержащий объектив с маркой, установленной в фокальной плоскости объектива, и полупрозрачный отражатель, размещенный на выходе объектива наклонно к его оптической оси, дополнительно в фокальной плоскости объектива установлено n фокальных уровней, содержащих контрольные шкалы и подвижные пузырьки, при этом проекции шкал на горизонтальную плоскость Земли ориентированы перпендикулярно горизонтальным осям системы отсчета углов визирования, а подвижные пузырьки совмещены с нулевыми рисками контрольных шкал уровней.
Для стабилизации в пространстве вертикальной плоскости отсчета углов визирования число n равно 1.
Для полной стабилизации в пространстве системы отсчета углов визирования число n равно 2.
Сопоставимый анализ предлагаемого устройства и устройства-прототипа показывает, что заявляемый коллиматорный визир отличается наличием в его составе блока стабилизации, содержащего один фокальный уровень для стабилизации одной плоскости системы отсчета углов визирования или два фокальных уровня для стабилизации всей системы отсчета, при этом в состав каждого уровня входит контрольная шкала и подвижный пузырек, проецируемые в поле зрения оператора соответственно как контрольные и стабилизированные метки.
Такое решение поставленной задачи дает возможность при совмещении подвижного пузырька с нулевыми метками шкалы одного фокального уровня стабилизировать вертикальную плоскость системы отсчета, а при совмещении подвижного пузырька второго фокального уровня с контрольными шкалами произвести стабилизацию всей системы в пространстве относительно Земли.
В иных технических решениях в области оптического приборостроения такой совокупности не обнаружено, что обуславливает большой экономический эффект данного предложения:
- повышение точности отсчета углов визирования;
- отсутствие необходимости проведения вычислительных операций;
- обеспечение работы оператора в свободном пространстве, связанном с Землей.
Подробно описание предлагаемого устройства приведено ниже со ссылкой на чертежи, где представлена следующая информация:
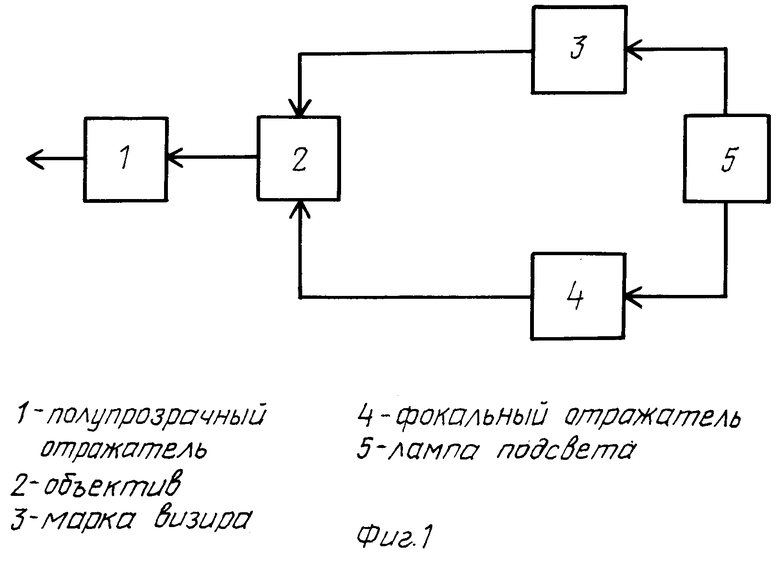
Фиг.1 - Блок-схема предлагаемого устройства с одним фокальным уровнем.
Фиг.2 - Оптическая схема предлагаемого устройства с одним фокальным уровнем.
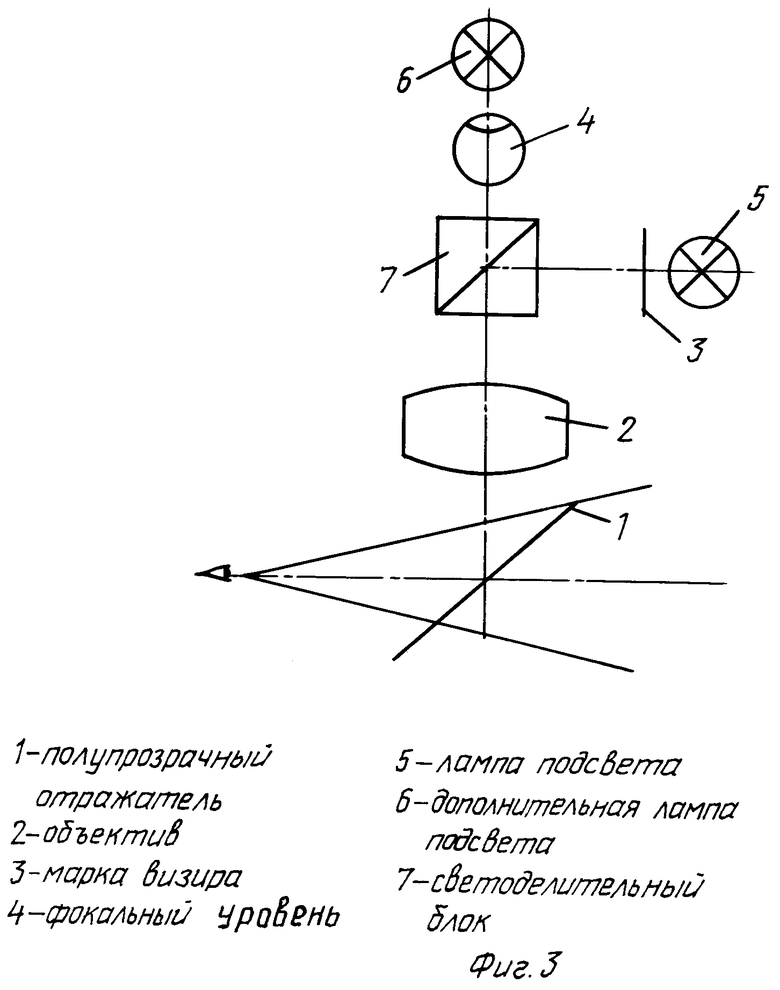
Фиг.3 - Оптическая схема предлагаемого устройства с одним фокальным уровнем и светоделительным блоком.
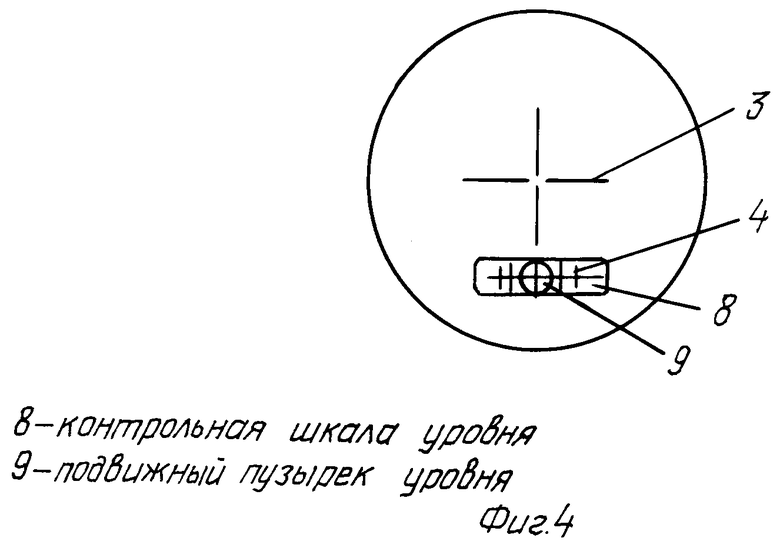
Фиг.4 - Расположение проекции меток в поле зрения оператора при использовании в предлагаемом устройстве одного фокального уровня.
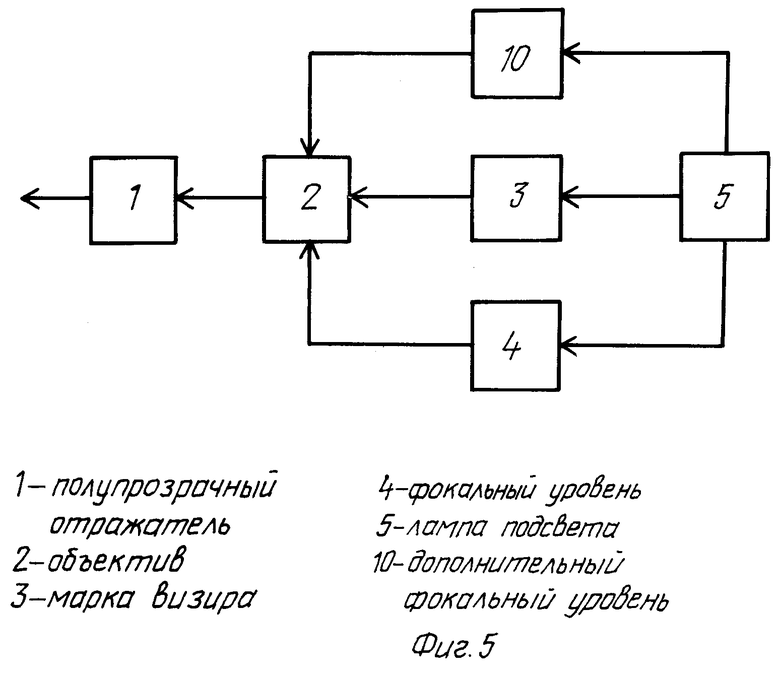
Фиг.5 - Блок-схема предлагаемого устройства с двумя фокальными уровнями.
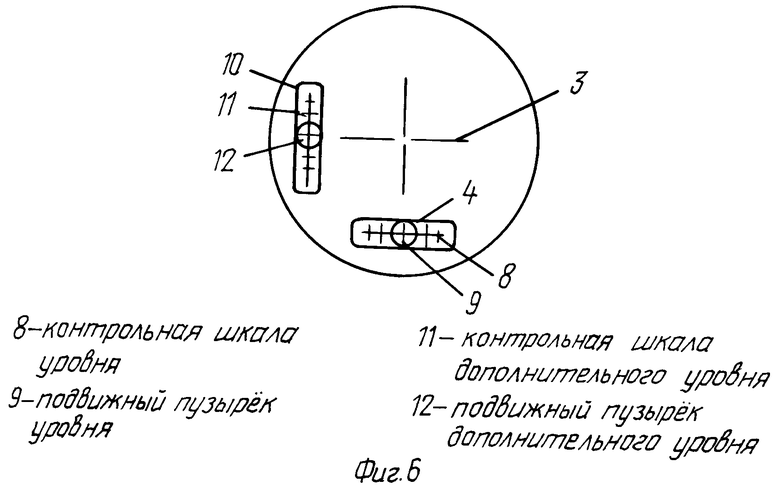
Фиг.6 - Расположение проекции меток в поле зрения оператора при использовании в предлагаемом устройстве двух фокальных уровней.
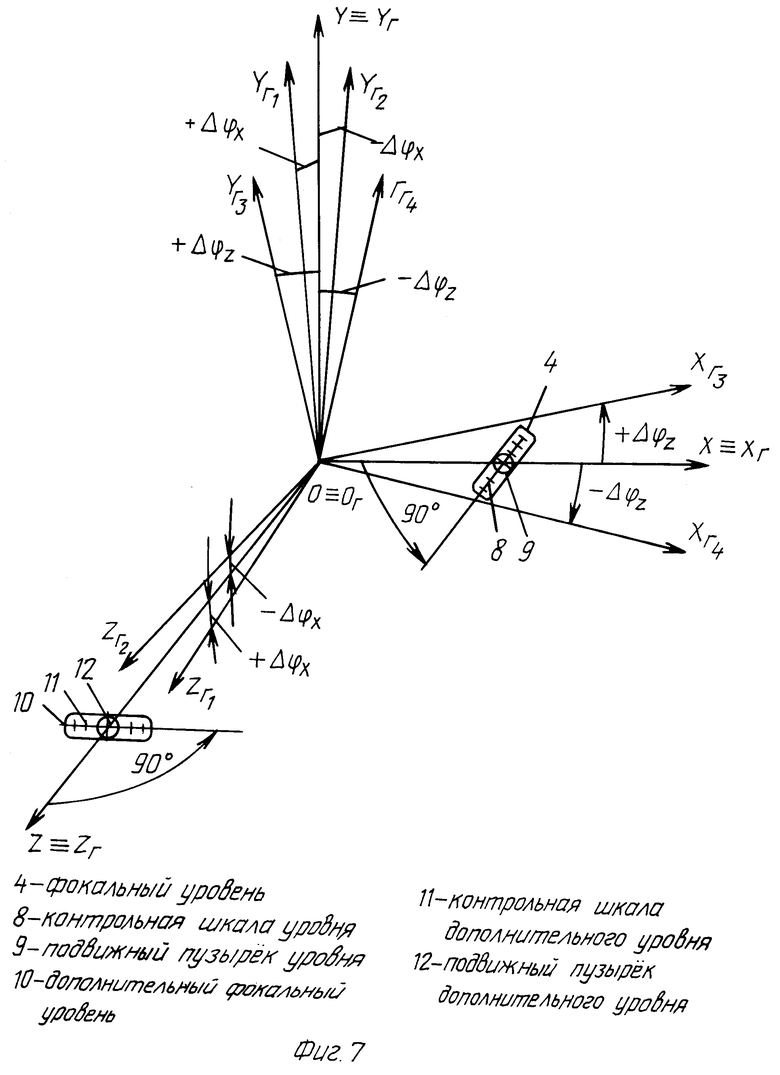
Фиг.7 - Схема расположения одного и двух фокальных уровней относительно системы отсчета углов визирования.
На чертежах и в тексте приняты следующие обозначения:
OXYZ - система отсчета углов визирования;
OXГYГZГ - система координат, связанная с подвижным основанием установки коллиматорного визира;
ΔϕХ; ΔϕZ - угловые отклонения системы отсчета углов визирования относительно горизонтальной плоскости Земли.
Предлагаемое устройство представляет собой коллиматорный визир с функционально обусловленной стабилизацией системы отсчета углов визирования относительно Земли:
- стабилизацией одной вертикальной плоскости системы отсчета;
- полной стабилизации системы отсчета.
Рассмотрим последовательно два вида предлагаемых устройств.
На Фиг.1 представлена блок-схема коллиматорного визира со стабилизацией вертикальной плоскости системы отсчета углов визирования.
Данное предлагаемое устройство состоит из следующих блоков:
1 - полупрозрачный отражатель;
2 - объектив;
3 - марка визира;
4 - фокальный уровень;
5 - лампа подсвета.
Более подробно размещение составляющих частей предлагаемого устройства относительно оптической оси, т.е. линии визирования оператора, дано на оптической схеме, представленной на Фиг.2.
При этом в предлагаемом устройстве может быть применен любой объектив, выполненный по схеме классического коллиматорного объектива.
На Фиг.2 показан линзовый объектив, описанный в книге Л.П.Лазарев. "Оптико-электронные приборы наведения", Москва, Машиностроение, 1989 г., с.247-250.
Однако классические схемы коллиматорных объективов могут быть выполнены по типу:
- зеркального объектива (см. книгу Л.П.Лазарев. "Оптико-электронные приборы наведения", Москва, Машиностроение, 1989 г., с.250-253);
- зеркально-линзового объектива (см. книгу В.Т.Бородин, Г.М.Рыльский. "Пилотажные комплексы и системы управления самолетов и вертолетов", Москва, Машиностроение, 1978 г., с.151-152).
Возможны и другие схемы коллиматорных объективов, например голографический и др.
Во всех случаях исполнения коллиматорного объектива на выходе его под углом к оптической оси расположен полупрозрачный отражатель 1, а в фокальной плоскости - марка 3 и фокальный уровень 4.
При этом расположение марки и уровня могут быть совмещенные в одном месте и подсвечены одной лампой 5, как показано на Фиг.1 и 2, а могут быть разнесены относительно друг друга в соответствии с оптической схемой Фиг.3 и совмещаться в фокальной плоскости объектива 2 только с помощью дополнительной лампы подсвета 6 и светоделительного блока 7. При этом идея исполнения коллиматорного визира со стабилизацией вертикальной плоскости системы отсчета углов визирования не нарушается.
Марка 3, указанная на схемах Фиг.1-3, может быть выполнена различным образом, например в виде перекрестия, аналогично устройству-прототипу.
Уровень 4, с помощью которого осуществляется стабилизация вертикальной плоскости отсчета углов визирования относительно Земли, может быть выполнен в соответствии с Рис.4.69 или 4.38 (см. М.Я.Крюгер и др. "Справочник конструктора оптико-механических приборов", Ленинград, Машиностроение, 1980 г., с.252-253).
Выбор конструкции уровня определяется выбором конструктивного исполнения самого коллиматорного визира.
Уровень 4 содержит контрольную шкалу 8 и подвижный пузырек 9 (см. Фиг.4).
При этом установка шкалы 8 и подвижного пузырька 9 производится таким образом, что проекция шкалы на горизонтальную плоскость Земли ориентирована перпендикулярно одной из горизонтальных осей системы отсчета углов визирования, а подвижный пузырек совмещен с нулевыми рисками контрольной шкалы уровня, как показано на Фиг.7.
Предлагаемый коллиматорный визир со стабилизацией вертикальной плоскости отсчета углов визирования (n=1) работает следующим образом. Оператор через полупрозрачный отражатель 1 (см. Фиг.1-3) наблюдает цель, а также изображение марки 3 визира совместно с изображением контрольных шкал и подвижного пузырька уровня 4, которые проецируются в поле зрения оператора с помощью устройства подсвета 5, объектива 2 и отражателя 1. Вид поля зрения, которое наблюдает оператор во время работы, показан на Фиг.4.
Для наложения марки визира на цель оператор должен смещать ее только в той вертикальной плоскости системы отсчета, которая стабилизирована в предлагаемом устройстве с помощью уровня 4. На схеме Фиг.7 показано, что с помощью уровня 4 стабилизирована вертикальная плоскость ХОY, так как уровень 4 при совмещении нулевых рисок контрольной шкалы 8 с подвижным пузырьком 9 не позволяет данной вертикальной плоскости колебаться в пространстве на углы отклонения подвижного основания ±ΔϕХ и занимать положение этого подвижного основания, т.е. системы (ОХГYГZГ), связанной с ним.
Таким образом, работа оператора с предлагаемым визиром заключается в том, чтобы одновременно с наложением перекрестия на цель, проецируемую в поле зрения марки 3, удерживать пузырек 9 в пределах нулевых рисок контрольных шкал 8.
Примером таких визирных систем, в которых можно стабилизировать только одну вертикальную плоскость системы отсчета в связи с тем, что у них вводится только одна вертикальная поправка для прицеливания, является малогабаритный коллиматорный прицел для охотничьего ружья (см. заявку с положительным решением Украины №95020874 от 24.02.95 г.).
Вторым видом предлагаемого устройства является коллиматорный визир с полной стабилизацией системы отсчета углов визирования относительно Земли (n=2), блок-схема которого представлена на Фиг.5.
Данное предлагаемое устройство состоит из следующих блоков:
1 - полупрозрачный отражатель;
2 - объектив;
3 - марка визира;
4 - фокальный уровень;
5 - лампа подсвета;
10 - дополнительный фокальный уровень.
Как видно из схемы Фиг.5, предлагаемое устройство второго типа (n=2) отличается от построения коллиматорного визира со стабилизацией вертикальной плоскости системы отсчета углов визирования (устройства первого типа ~ n=1) только одним фокальным уровнем 10, дополнительно установленным в фокальной плоскости объектива 2.
В связи с этим все описанные выше конструктивные особенности построения устройства первого типа полностью относятся к устройству второго типа, поэтому установка дополнительного уровня 10 рассмотрена ниже более подробно.
Уровень 10 может быть выполнен в соответствии с Рис.4.69 или 4.38 (см. М.Я.Крюгер и др. "Справочник конструктора оптико-механических приборов", Ленинград, Машиностроение, 1980 г., с.252-253).
Выбор конструкции уровня 10 определяется выбором конструкции уровня 4 для идентичности работы оператора при их совместном использовании.
Уровень 10 содержит контрольную шкалу 11 и подвижный пузырек 12 (см. Фиг.6).
При этом установка контрольной шкалы 11 и подвижного пузырька 12 производится таким образом, что проекция шкалы на горизонтальную плоскость Земли ориентирована перпендикулярно второй горизонтальной оси системы отсчета углов визирования, а подвижный пузырек данного уровня совмещен с нулевыми рисками контрольной шкалы, как показано на Фиг.7. Таким образом, проекции контрольных шкал двух уровней 4 и 10 перпендикулярны друг другу и так же перпендикулярно друг другу проецируются в поле зрения оператора (см. Фиг.6).
Предлагаемый коллиматорный визир второго типа с полной стабилизацией системы отсчета углов визирования работает следующим образом. Оператор через полупрозрачный отражатель (см. Фиг.5) наблюдает цель, а также изображение марки 3 визира совместно с изображением контрольных шкал подвижных пузырьков уровней 4 и 10, которые проецируются в поле зрения оператора с помощью устройства подсвета 5, объектива 2 и отражателя 1. Вид поля зрения, которое наблюдает оператор во время работы, показано на Фиг.6.
Для наложения марки визира на цель оператор может смещать ее в любой плоскости системы отсчета в связи с ее полной стабилизацией.
При этом углы визирования измеряются в земной системе координат и не требуют пересчета в связи с колебаниями подвижного основания ±ΔϕХ; ±ΔϕZ.
На схеме Фиг.7 показано, как происходит стабилизация системы отсчета.
С помощью уровня 4 стабилизирована вертикальная плоскость системы отсчета ХОY, так как уровень 4 при совмещении нулевых рисок контрольной шкалы 8 с подвижным пузырьком 9 не позволяет данной вертикальной плоскости колебаться в пространстве на углы отклонения подвижного основания ±ΔϕX и занимать положения этого подвижного основания, т.е. системы ОХГYГZГ, связанной с ним.
При наличии второго уровня 10 оператор одновременно стабилизирует и вторую вертикальную плоскость системы отсчета YОZ, а следовательно, и всю систему.
Уровень 10 при совмещении нулевых рисок контрольной шкалы 11 с подвижным пузырьком 12 не позволяет данной плоскости YOZ колебаться в пространстве на углы отклонения подвижного основания ±ΔϕZ и занимать соответствующие положения этого подвижного основания, т.е. системы OXГYГZГ, связанной с ним.
Таким образом, работа оператора с предлагаемым коллиматорным визиром заключается в том, чтобы одновременно с наложением на цель, проецируемую в поле зрения марки, удерживать пузырьки первого и второго уровней в пределах нулевых рисок соответствующих контрольных шкал.
При этом следует отметить, что вместо двух уровней в устройстве второго типа может быть применен один двухкоординатный уровень сферического типа, содержащий две взаимно перпендикулярные контрольные шкалы и один подвижный пузырек.
Анализ структурной схемы построения предлагаемого устройства, а именно коллиматорного визира со стабилизацией системы отсчета углов визирования, показывает, как велико может быть его применение в различных областях техники при малых габаритах и весе. При этом полностью устраняются недостатки устройства-прототипа, обусловленные отсутствием стабилизации системы отсчета.
Таким образом, применение предлагаемого устройства дает большой экономический эффект, обусловленный повышением точности визирных устройств, устранения трудоемких расчетов по учету колебаний объекта установки, что приводит к расширению области применения коллиматорных визиров за счет введения малогабаритных каналов стабилизации системы отсчета в оптических схемах визиров рассматриваемого типа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЮСТИРОВКИ НАШЛЕМНОЙ СИСТЕМЫ ВИЗИРОВАНИЯ | 2002 |
|
RU2251720C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ОСИ ВИЗИРА | 2001 |
|
RU2227924C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ВНУТРЕННИХ ПОВЕРХНОСТЕЙ ТЕЛ | 2004 |
|
RU2293363C2 |
| ЛАЗЕРНЫЙ ЦЕНТРАТОР ДЛЯ РЕНТГЕНОВСКОГО ИЗЛУЧАТЕЛЯ | 2008 |
|
RU2369993C1 |
| Коллиматорный визир | 1975 |
|
SU556403A1 |
| Способ построения пространственной геодезической сети в виде цепочки треугольников и угломерный прибор для его осуществления | 1986 |
|
SU1613858A1 |
| НАШЛЕМНАЯ СИСТЕМА ЦЕЛЕУКАЗАНИЯ | 2000 |
|
RU2168152C1 |
| ЛАЗЕРНЫЙ КОЛЛИМАТОРНЫЙ ПРИЦЕЛ | 1992 |
|
RU2054157C1 |
| АЭРОСЪЕМОЧНЫЙ КОЛЛИМАТОРНЫЙ ВИЗИР | 1965 |
|
SU169822A1 |
| ОПТИЧЕСКИЙ ПРИЦЕЛ ДЛЯ СТРЕЛКОВОГО ОРУЖИЯ | 2000 |
|
RU2229669C2 |

Изобретение относится к области оптического приборостроения и может быть использовано при разработке оптико-электронных систем визирования и прицеливания. Коллиматорный визир содержит объектив с маркой, полупрозрачный отражатель и n фокальных уровней. Марка и фокальные уровни установлены в фокальной плоскости объектива. Полупрозрачный отражатель размещен на выходе объектива наклонно к его оптической оси. Фокальные уровни содержат контрольные шкалы и подвижные пузырьки. Проекции шкал на горизонтальную плоскость Земли ориентированы перпендикулярно горизонтальным осям системы отсчета углов визирования. Подвижные пузырьки совмещены с нулевыми рисками контрольных шкал уровней. Для стабилизации в пространстве вертикальной плоскости отсчета углов визирования число n равно 1. Для полной стабилизации в пространстве системы отсчета углов визирования число n равно 2. Технический результат - повышение точности визирных устройств, устранение трудоемкости расчетов по учету колебаний объекта установки. 1 з.п. ф-лы, 7 ил.
| US 3375375 А, 26.03.1968.RU 2052841 C1, 20.01.1996.SU 1827136 A3, 10.03.1996.RU 2037131 С1, 09.06.1995.DE 4101609 A1, 23.07.1992.GB 1145066 A, 12.03.1969.US 3128433 A1, 03.02.1983. |

