Предлагаемое техническое решение относится к области оптикоэлектронного приборостроения, в частности к нашлемным системам визирования, и может быть использовано при их разработке и юстировке с применением в различных областях техники.
Предметом рассмотрения в данном техническом решении является нашлемная визирная система совмещенного типа, в которой измерительные блоки совмещены с блоками визирования и установлены непосредственно на шлеме оператора для измерения его разворотов. В данном случае рассматривается вопрос использования в качестве измерителей различного типа гироскопических систем, предназначенных для измерения как угловых отклонений визирной системы, так и скорости ее разворота.
Однако применение предлагаемого способа не ограничено типом измерителей и выбором подвижного основания, изменяемого свое положение в пространстве, и может быть распространено на юстировку аналогичных структурных схем построения приборов.
В настоящее время известны структурные схемы построения нашлемных визирных систем, состоящих из измерителей скорости разворота головы оператора, определенным образом ориентированных относительно оси визира (линии визирования оператора), установленных совместно на подвижном основании, в данном случае на шлеме оператора, и вычислителя.
Подробно состав известных устройств и принцип их действия описан в следующих источниках:
- патенты Украины: №30191 A, 30200 А, 30190 A, 30189 A, кл. G 02 В 23/00, опубл. 15.11.2000 г.
- Великобритания: патент GВ №2143948 A.
Анализ известных структурных схем построения нашлемных визирных систем совмещенного типа показывает, что во всех устройствах измерители установлены жестко на шлеме и оси их определенным образом совмещены с осями визира и базовой системой координат.
При этом следует отметить, что во всех аналогах отклонения измерителей и визира производятся относительно осей разворота головы оператора, а выдача углов визирования - относительно системы отсчета потребителя, т.е. заданной базовой системы координат.
Таким образом, достижение высокой точности определения углов визирования в такого типа структурных схемах построения возможно только в результате решения следующих вопросов:
- выставка систем отсчета измерителей и визира относительно осей разворота головы оператора и между собой;
- выставка измерительно-визирной системы относительно базовой системы координат.
Существующие способы юстировки анализируемых аналогов заключаются в проведении операции по решению перечисленных выше вопросов выставки измерительных блоков и визира методом последовательных приближений контролем выходных углов визирования в граничных точках диапазона их изменения.
При этом, учитывая тот факт, что установка визирно-измерительных блоков на шлеме оператора ограничена габаритами и весом установочных элементов, весь процесс юстировки по выставке измерителей разворотов головы оператора ведется с помощью подшабривания, применения специальных прокладок для заданной ориентации, что приводит к значительному увеличению времени юстировки и снижению точности выставки указанных блоков относительно базовой системы координат.
Таким образом, недостатки способов юстировки аналогов предлагаемого способа следующие:
- длительность процесса юстировки;
- низкая точность юстировки за счет неучета внутренних элементов юстируемых схем, например установки чувствительных осей измерения углового отклонения относительно корпуса, с помощью которого производится юстировка измерительной системы.
Наиболее близким по технической сути и решаемым задачам является способ юстировки, заложенный в устройстве определения ориентации оси визира (патент Украины №30189А, Мкл6 С 02 В 23/00, опубл. 15.11.2000 г.).
В соответствии с данным способом производится угловая юстировка измерителей путем установки их на едином кронштейне с последующим закреплением его на шлеме оператора. Эта часть юстировочного процесса приводит к точной выставке осей корпуса измерителей друг относительно друга за счет посадочных мест единого кронштейна. При этом допускается некоторое смещение и разворот измерителей друг относительно друга путем подшабривания и установки прокладок для достижения минимальных погрешностей углов визирования, определяемых нашлемной визирной системой, с последующим жестким закреплением измерителей. Вторая часть юстировочного процесса, а именно - установка измерителей относительно базовой системы координат, достигается в результате двойной юстировки:
- ориентация корпуса единого кронштейна относительно нулевой метки единой системы;
- совместная установка визирно-измерительной системы относительно осей базовой системы координат по внешним тестам за счет регулировочных элементов, установленных на шлеме.
При этом следует отметить, что описанный процесс юстировки проводится относительно корпусных деталей измерителей и не учитывает сложного внутреннего взаимного расположения чувствительных осей измерителей.
На основании вышеизложенного можно отметить следующие существенные недостатки способа-прототипа:
- длительность процесса юстировки, обусловленная применением критериев последовательного приближения точностных характеристик узлов визирования, определяемых нашлемной визирной системой, к заданной точности определения угловых координат визируемых объектов;
- ограниченная величина достигаемых результатов точностных характеристик в связи с невозможностью учета при юстировке внутренних величин взаимной ориентации чувствительных осей измерителей разворотов;
- контрольные точки юстировочного процесса функционально не связаны с критериями проведения данного процесса.
Перед автором стояла задача разработать способ юстировки нашлемной системы визирования, обладающий быстродействием и точностью юстировки чувствительных осей измерителей разворотов головы оператора относительно базовой системы координат при жестком закреплении измерителей на посадочные места визирно-измерительного блока.
Решение поставленной задачи достигается тем, что в известном способе юстировки нашлемной системы визирования, включающей визир, измерители угловой скорости разворота головы оператора, установленные на шлеме, заключающемся в ориентации перекрестия визира в нулевое положение относительно базовой системы координат визира и в жестком закреплении измерителей на шлеме оператора, вводят в поле зрения оператора метки стабилизации горизонтальной плоскости базовой системы координат визира, ориентируют горизонтальную плоскость базовой системы параллельно горизонтальной плоскости Земли и фиксируют ее положение, а затем вводят в поле зрения оператора растр с метками заданного разворота головы оператора и после каждого разворота при совмещении перекрестия визира с заданной меткой регистрируют "n" текущих значений углов визирования, сравнивают их с априорной информацией, а затем разворачивают последовательно чувствительную ось каждого измерителя относительно базовой системы координат визира в направлении и на величину, однозначно определяемую измеренным рассогласованием между зарегистрированными значениями углов визирования и априорной информацией.
Сущность заявляемого изобретения состоит в том, что в поле зрения оператора вводят метки стабилизации для ориентации горизонтальной плоскости базовой системы визира параллельно горизонтальной плоскости Земли и после фиксации ее положения вводят изображение растра для последовательного разворота головы оператора в такие точки пространства, перемещение из которых функционально зависит только от одного юстировочного параметра, который однозначно определяется по рассогласованию зарегистрированных значений углов визирования в заданных точках и априорной информацией в отличие от способа-прототипа, юстировка при применении которого производится по всем юстируемым параметрам методом последовательных приближений без учета внутренней ориентации чувствительных осей относительно корпусов измерителей. Сопоставленный анализ предлагаемого способа и способа-прототипа показывает, что юстировка производится с помощью вводимого в поле зрения растра, задает порядок разворота головы оператора в такие точки пространства, перемещение из которых однозначно определяет необходимые юстировочные перемещения визирно-измерительной системы по регистрируемым значениям углов визирования в этих точках и сравнению их с априорной информацией, что дает возможность учесть не только внешнее расположение юстируемых узлов но и учесть при этом погрешности внутренних структур визира и измерителей.
Такое решение дает большой экономический эффект за счет значительного повышения точности юстировки и уменьшения времени ее проведения, обусловленных следующими факторами:
- однозначное определение юстируемых перемещений;
- учет погрешностей внутреннего построения визирно-измерительной системы, которая не подлежит разборке;
- устранение необходимости применения метода последовательных приближений.
Перечисленные факторы обеспечивают предлагаемому способу быстродействие и возможность автоматизации процесса юстировки.
Подробно описание предлагаемого способа представлено ниже со ссылкой на чертежи, где представлена следующая информация:
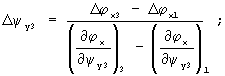
Фиг.1 - схема разворота головы оператора относительно базовой системы координат визира при измерении углов визирования ϕy, ϕz;
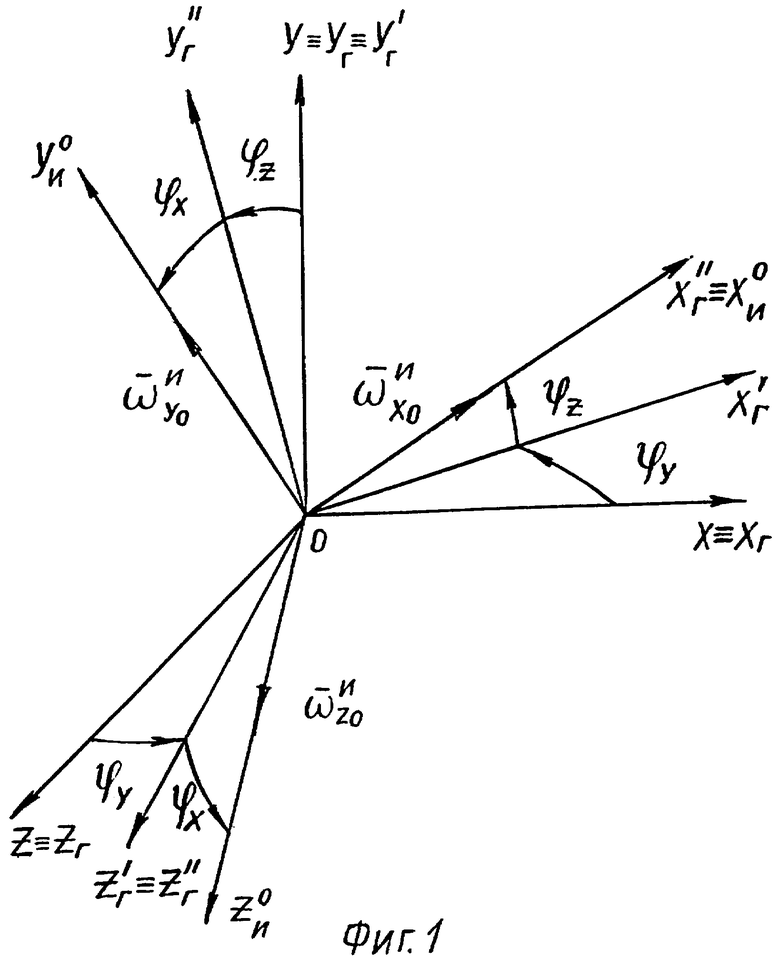
Фиг.2 - разворот системы отсчета измерителя И1 относительно номинального положения измерительной системы;
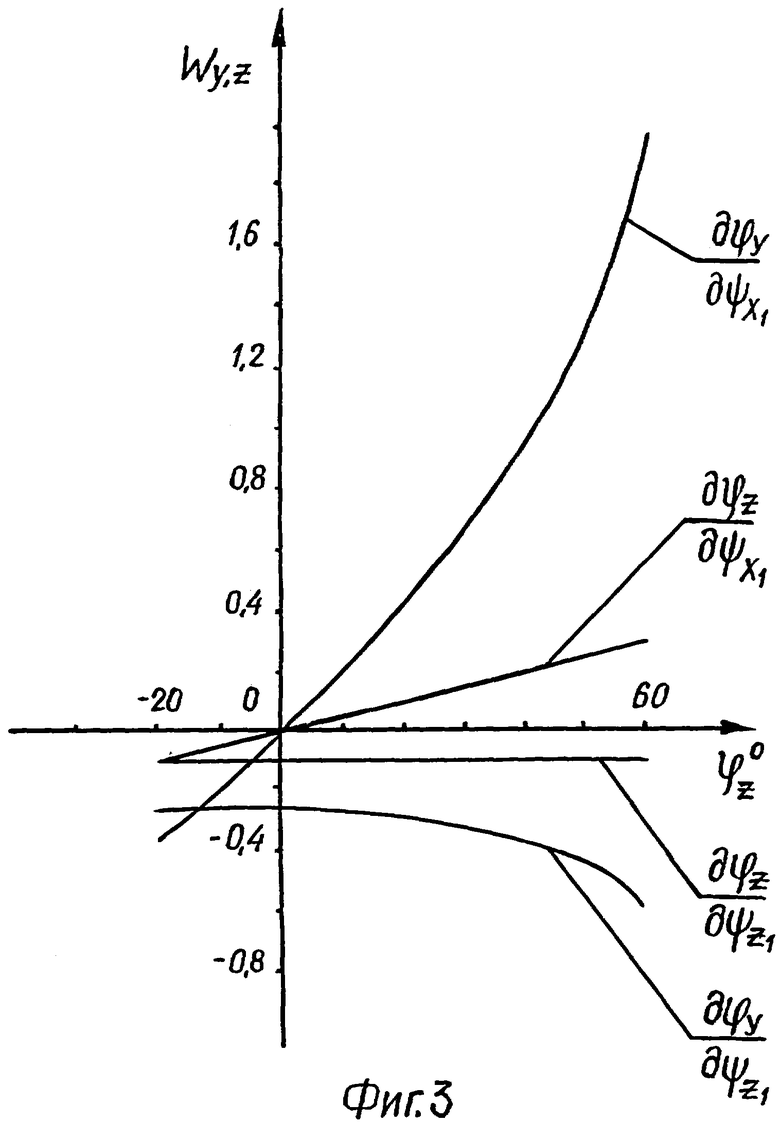
Фиг.3 - функциональная зависимость передачи погрешностей разворота системы отсчета измерителя И1 в углы визирования ϕy, ϕz при изменении вертикального угла визирования ϕz;
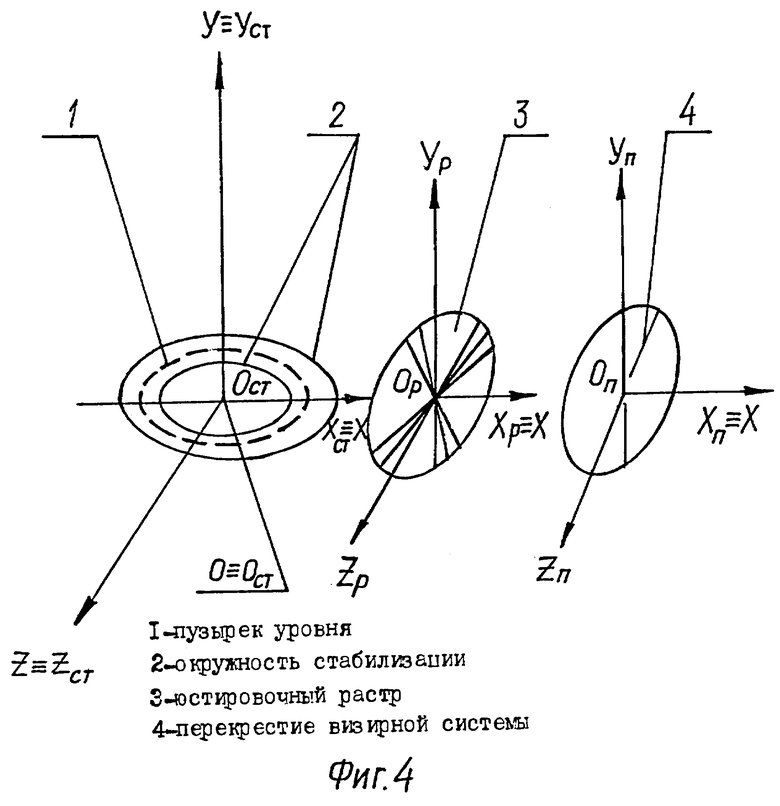
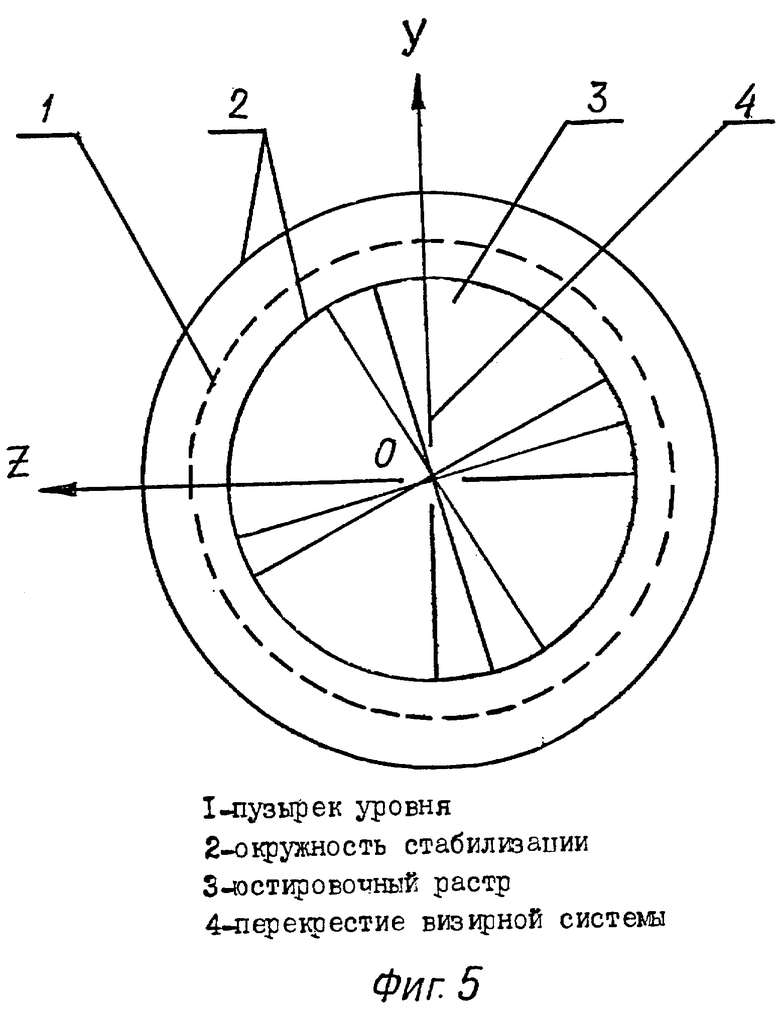
Фиг.4-Фиг.5 - схемы технической реализации ввода заданных точек разворота головы оператора;
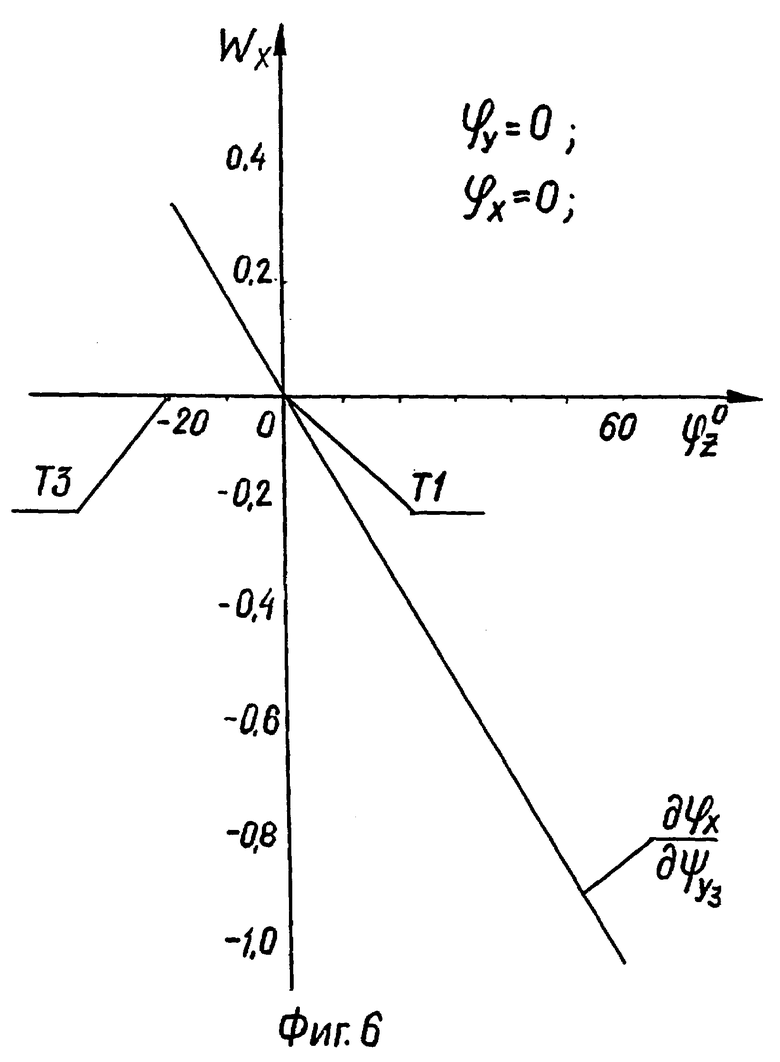
Фиг.6-Фиг.8 - схемы выбора точек перемещения головы оператора в пространстве при юстировке нашлемной визирной системы по предлагаемому способу;
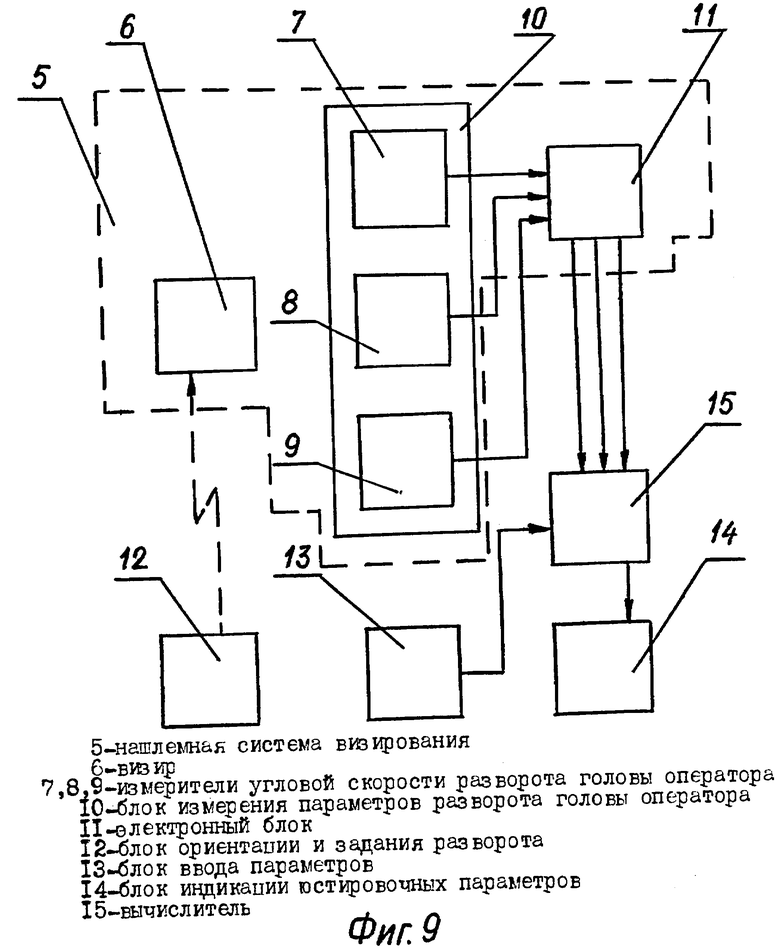
Фиг.9 - блок-схема технической реализации предлагаемого способа.
На чертежах приняты следующие обозначения:
ОХYZ - базовая система координат;
ϕy; ϕz - углы визирования в базовой системе координат;
ϕх - креновый разворот головы оператора в базовой системе координат;
ОХгYгZг - система разворота головы оператора в нулевом положении (при ϕх=0; ϕу=0; ϕz=0);
 - системы разворота головы оператора при соответствующем вводе углов визирования ϕy; ϕz и кренового разворота ϕx (связанная система координат);
- системы разворота головы оператора при соответствующем вводе углов визирования ϕy; ϕz и кренового разворота ϕx (связанная система координат);
 - система измерения параметров разворота головы оператора в номинальном положении (без наличия погрешностей установки измерителей относительно системы разворота головы оператора);
- система измерения параметров разворота головы оператора в номинальном положении (без наличия погрешностей установки измерителей относительно системы разворота головы оператора);


 - угловые скорости разворота головы оператора в номинальной системе измерения
- угловые скорости разворота головы оператора в номинальной системе измерения  ;
;
ОХи1Уи1Zи1 - система координат измерителя И1 при наличии углового смещения чувствительной оси;
OYИ1 - чувствительная ось измерителя И1;
ΔψX1; ψZ1 - угловые, подлежащие юстировке, смещения чувствительной оси измерителя И1 относительно номинальной системы измерения;
 - текущие положения системы координат измерителя И1 при развороте чувствительной оси на углы ΔψX1; ΔψZ1 соответственно;
- текущие положения системы координат измерителя И1 при развороте чувствительной оси на углы ΔψX1; ΔψZ1 соответственно;
Wx; Wy; Wz - обобщенное обозначение передаточных отношений юстируемых параметров измерительной системы в углы визирования ϕy; ϕz и измеряемого кренового разворота головы оператора ϕx;
 - передаточные отношения погрешностей углового смещения чувствительной оси первого измерителя (ΔψX1; ΔψZ1) в углы визирования ϕy; ϕz и измеряемого кренового разворота головы оператора ϕx;
- передаточные отношения погрешностей углового смещения чувствительной оси первого измерителя (ΔψX1; ΔψZ1) в углы визирования ϕy; ϕz и измеряемого кренового разворота головы оператора ϕx;
OрXрYрZр - система координат юстировочного растра;
ОстХстYстZст - система координат системы стабилизации;
ОпХпYпZп - система координат перекрестия визирной системы;
Δψy3; ΔψZ3 - угловые, подлежащие юстировке, смещения чувствительной оси измерителя И3 относительно номинальной системы измерения;
 - передаточные отношения погрешностей углового смещения чувствительной оси третьего измерителя (Δψy3; ΔψZ3) в углы визирования ϕy; ϕz и измеряемого кренового разворота ϕx;
- передаточные отношения погрешностей углового смещения чувствительной оси третьего измерителя (Δψy3; ΔψZ3) в углы визирования ϕy; ϕz и измеряемого кренового разворота ϕx;


 - измеряемые угловые скорости разворота головы оператора при наличии угловых смещений чувствительных осей измерителей И1; И2; И3 относительно номинальной системы измерения.
- измеряемые угловые скорости разворота головы оператора при наличии угловых смещений чувствительных осей измерителей И1; И2; И3 относительно номинальной системы измерения.
Пояснение способа юстировки нашлемной системы визирования осуществляется посредством схем технической реализации ввода заданных точек разворота головы оператора, показанных на Фиг.4, 5, где:
1 - пузырек уровня;
2 - окружность стабилизации;
3 - юстировочный растр;
4 - перекрестие визирной системы;
и устройства, блок-схема которого представлена на Фиг.9, где:
5 - нашлемная система визирования;
6 - визир;
7, 8, 9 - измерители угловой скорости разворота головы операторa;
10 - блок измерения параметров разворота головы оператора;
11 - электронный блок;
12 - блок ориентации и задания разворота,
13 - блок ввода параметров;
14 - блок индикации юстировочных параметров;
15 - вычислитель.
В блоке измерения параметров разворота головы оператора 10 жестко установлены на посадочные места измерители 7, 8, 9 угловой скорости разворота головы оператора (

 ).
).
Электронный блок 11 осуществляет определение углов визирования по измеренным угловым скоростям разворота головы оператоpa (

 ), в соответствии с подробно описанной схемой патента Украины №30189А, кл. G 02 В 23/00, опубл. 15.11.2000 г.
), в соответствии с подробно описанной схемой патента Украины №30189А, кл. G 02 В 23/00, опубл. 15.11.2000 г.
Согласно предлагаемому способу юстировки нашлемной системы визирования, построенной на совмещении измерительной системы с визирной системой на шлеме оператора, производится начальная установка измерителей 7, 8, 9 углового разворота головы оператора на посадочные места при ориентации перекрестия 4 визира 6 в нулевое положение относительно базовой системы координат. Данная операция производится аналогично операциям юстировки способа-прототипа. При этом для дальнейшего пояснения операций юстировки предлагаемого способа следует отметить, что углы горизонтального ϕy и вертикального визирования ϕz (см. Фиг.1) определяются как угловые координаты ориентации оси визира 6, установленного на подвижном основании, например на шлеме оператора, при совмещении перекрестия 4 визира 6 с заданным ориентиром. Угловая ориентация оси визира 6 при этом определяется с учетом кренового разворота головы оператора ϕх с помощью специально установленных измерителей 7, 8, 9 параметров углового разворота 

 , измерительные оси которых связаны с головой оператора, взаимно перпендикулярны и меняют свою ориентацию в пространстве, как показано на схеме Фиг.1. При юстировке системы без погрешностей измерительные оси измерителей 7, 8, 9 (И1; И2; И3) совпадают с осями номинальной измерительной системы
, измерительные оси которых связаны с головой оператора, взаимно перпендикулярны и меняют свою ориентацию в пространстве, как показано на схеме Фиг.1. При юстировке системы без погрешностей измерительные оси измерителей 7, 8, 9 (И1; И2; И3) совпадают с осями номинальной измерительной системы  следующем порядке:
следующем порядке:
- измерительная ось измерителя И1 (ОYИ1) при измерении  совпадает с осью
совпадает с осью 
 ;
;
- измерительная ось измерителя И2 (OZИ2) при измерении  совпадает с осью
совпадает с осью 
 ;
;
- измерительная ось измерителя И3 (OXИ3) при измерении  совпадает с осью
совпадает с осью 
 .
.
Таким образом, измеряя параметры углового разворота подвижного основания, т.е. головы оператора ( ;
; ;
; ) при установке измерителей И1, И2 И3 без погрешностей, т.е. когда оси номинальной измерительной системы совпадают с осями базовой системы координат в нулевом положении (ϕx=0; ϕy=0; ϕz=0), можно определить углы визирования ϕy; ϕz по формулам способа-прототипа и в соответствии со схемой, представленной на Фиг.1.
) при установке измерителей И1, И2 И3 без погрешностей, т.е. когда оси номинальной измерительной системы совпадают с осями базовой системы координат в нулевом положении (ϕx=0; ϕy=0; ϕz=0), можно определить углы визирования ϕy; ϕz по формулам способа-прототипа и в соответствии со схемой, представленной на Фиг.1.


где: ϕx - угол кренового разворота головы оператора в связанной с головой оператора системе координат.
 .
.
При появлении рассогласования между номинальной измерительной системой  и измерительными осями И1, И2, И3 в каналах определения ϕx, ϕy, ϕz появляются погрешности, функциональная зависимость которых по диапазону изменения углов визирования определяется погрешностями установки чувствительных осей измерителей относительно осей номинальной измерительной системы, выбранным каналом регистрации и величиной углов визирования юстировочной точки в пространстве. Для примера показано смещение измерительной оси измерителя И1 относительно осей номинальной измерительной системы Δψx1; Δψz1 (см. схему Фиг.2).
и измерительными осями И1, И2, И3 в каналах определения ϕx, ϕy, ϕz появляются погрешности, функциональная зависимость которых по диапазону изменения углов визирования определяется погрешностями установки чувствительных осей измерителей относительно осей номинальной измерительной системы, выбранным каналом регистрации и величиной углов визирования юстировочной точки в пространстве. Для примера показано смещение измерительной оси измерителя И1 относительно осей номинальной измерительной системы Δψx1; Δψz1 (см. схему Фиг.2).
Указанные смещения Δψx1, Δψz1, как видно из схемы Фиг.3, вызывают наличие погрешностей в углах визирования ϕy; ϕz, что наглядно иллюстрируется функциональными зависимостями передаточных отношений юстируемых погрешностей и формулой их передачи в определяемые системой углы визирования, например:

Учитывая, что смещение измерительной оси Δψx1 постоянно для начала юстировки, то и вид функциональной зависимости регистрируемой погрешности в канале вертикального визирования Δϕy определяется функциональной зависимостью передаточного отношения  (см. Фиг.3). Рассматривая кривые передаточных отношений юстируемых параметров Δψx1; Δψz1 в определяемые системой углы визирования, следует отметить, что пространственные условия, при которых имеют место функциональные зависимости (Фиг.3), обуславливают даже по одному измерителю И1 наличие нескольких влияющих параметров (например, двух функциональных зависимостей
(см. Фиг.3). Рассматривая кривые передаточных отношений юстируемых параметров Δψx1; Δψz1 в определяемые системой углы визирования, следует отметить, что пространственные условия, при которых имеют место функциональные зависимости (Фиг.3), обуславливают даже по одному измерителю И1 наличие нескольких влияющих параметров (например, двух функциональных зависимостей  ;
;  ) в канале горизонтального угла визирования, что не дает возможности однозначного определения юстировочных параметров Δψx1, Δψz1, учитывая при этом еще возможное влияние на этот канал и погрешностей юстировки иных измерителей И2, И3.
) в канале горизонтального угла визирования, что не дает возможности однозначного определения юстировочных параметров Δψx1, Δψz1, учитывая при этом еще возможное влияние на этот канал и погрешностей юстировки иных измерителей И2, И3.
На основании вышеизложенного и учитывая сложность совокупного влияния погрешностей начальной установки измерителей относительно номинальной измерительной системы (И1 - Δψx1; Δψz1; И2 - Δψx2; Δψy2; И3 - Δψy3; Δψz3) следующей операцией предлагаемого способа юстировки является подбор и задание точек разворота головы оператора, перемещение из которых зависит только от одного юстируемого параметра.
Таким образом, в начальный момент устанавливают измерители 7, 8, 9 на посадочные места кронштейна измерительной системы при ориентации перекрестия 4 визирной системы в нулевое положение относительно базовой системы координат.
Для устранения погрешностей юстировки при жестком закреплении измерителей 7, 8, 9 на посадочные места вводят в поле зрения оператора растр 3 (см. Фиг.4, 5), задающий последовательные развороты головы оператора, с проведением операции по совмещению отсчетной системы растра 3 с базовой системой координат. Эта операция производится в результате совмещения меток стабилизации 1, 2, вводимых в поле зрения при наложении перекрестия 4 визира 6 на перекрестие растра 3, установленного в нулевое положение относительно отсчетной системы координат.
Для примера на Фиг.4 показана базовая система координат визира 6 (ОXYZ), связанная с Земной системой координат. При этом метки стабилизации 1, 2 для совмещения отсчетной системы растра 3 (OXpYpZp) формируются, например, с помощью уровня, содержащего пузырек 1 и окружности стабилизации 2 (см. Фиг.4, Фиг.5). Совмещая окружность стабилизации 2 с пузырьком уровня 1, т.е. обрамляя его, ориентируют горизонтальную плоскость XстOZст системы координат уровня параллельно горизонтальной плоскости Земли, а следовательно, горизонтальной плоскости базовой системы координат. При этом за счет конструктивного совмещения горизонтальных плоскостей уровня XстOZст и растра XpOZp при совмещении плоскости уровня XстOZст с плоскостью XОZ базовой системы координат плоскость растра XpOZp становится параллельной горизонтальной плоскости Земли. А при совмещении нулевого перекрестия растра 3 с перекрестием визирной системы 4 в нулевом положении осуществляется совмещение осей системы координат растра с базовой системой координат в начальном положении, т.е. операция совмещения произведена.
Для однозначного определения погрешностей углового смещения измерительных осей измерителей И1 (Δψx1, Δψz1); И2 (Δψx2, Δψy2); И3 (Δψy3, Δψz3) относительно номинальной измерительной системы (см. схему Фиг.2 для измерителя И1) необходимо развернуть голову оператора в такие точки пространства, перемещение из которых обуславливает погрешности углов визирования в каналах регистрации, функционально зависящие только от одного подлежащего юстировке параметра.
Разворот головы оператора в пространстве задается различными положениями меток в поле зрения растра и положением самого растра 3 относительно базовой системы координат OХYZ:
- относительно оси OX(ϕx) перекрестиями, нанесенными в плоскости растра 3 (Фиг.5);
- относительно осей ОY(ϕy), ОZ(ϕz) разворотом плоскости растра 3 относительно базовой системы координат (см. Фиг.4).
Ниже представлена идеология выбора точек ориентации и разворота головы оператора в пространстве для проведения операции однозначного определения юстировочных перемещений для компенсации погрешностей установки чувствительных осей измерителей И1, И2, И3 относительно номинальной измерительной системы координат юстируемой нашлемной системы визирования. Для примера показано проведение операции однозначного определения юстировочного параметра Δψy3 по измерителю И3. Указанная операция производится в соответствии с графиком передаточных отношений, представленных на фиг.6 (функциональная зависимость влияния погрешностей установки чувствительной оси измерителя И3  . Влияние юстировочных погрешностей других измерителей в данном канале ϕх для данных выбранных условий отсутствует. Таким образом, при развороте головы оператора из точки Т1 (ϕх=0; ϕy=0; ϕz=0) в точку Т3 (ϕх=0; ϕy=0; ϕz=0) может быть рассмотрена функциональная зависимость только по одному юстируемому параметру Δψy3. Представленная функциональная зависимость регистрируется в канале кренового разворота головы оператора (ϕх) при изменении угла вертикального визирования ϕz и постоянных значениях углов ϕx; ϕy с учетом формулы (1).
. Влияние юстировочных погрешностей других измерителей в данном канале ϕх для данных выбранных условий отсутствует. Таким образом, при развороте головы оператора из точки Т1 (ϕх=0; ϕy=0; ϕz=0) в точку Т3 (ϕх=0; ϕy=0; ϕz=0) может быть рассмотрена функциональная зависимость только по одному юстируемому параметру Δψy3. Представленная функциональная зависимость регистрируется в канале кренового разворота головы оператора (ϕх) при изменении угла вертикального визирования ϕz и постоянных значениях углов ϕx; ϕy с учетом формулы (1).
Для определения юстируемого параметра Δψy3, в соответствии с формулой (1) необходимо определить систематическую погрешность в заданном канале (в данном случае канале кренового разворота) и учесть известные передаточные отношения 
и  в точках T1 и T3 соответственно:
в точках T1 и T3 соответственно:
где:
Δϕx1; Δϕx3 - систематические погрешности канала кренового разворота в точках заданного перемещения головы оператора T1, T3,
 ;
;  - передаточные отношения юстировочного параметра Δψy3 в определяемый визирной системой угол ϕx кренового разворота головы оператора в точках заданного перемещения головы оператора T1; T3.
- передаточные отношения юстировочного параметра Δψy3 в определяемый визирной системой угол ϕx кренового разворота головы оператора в точках заданного перемещения головы оператора T1; T3.
Следует отметить, что систематические погрешности во всех каналах ϕx; ϕy; ϕz определяются по "n" регистрируемым параметрам в заданных точках разворота. Для рассматриваемого случая определения Δψy3 систематическая погрешность определяется следующим образом:
где: ϕxi - регистрируемые текущие, определяемые визирной системой углы кренового разворота головы оператора;
ϕxзад - априорная информация, заданное значение в точке разворота.
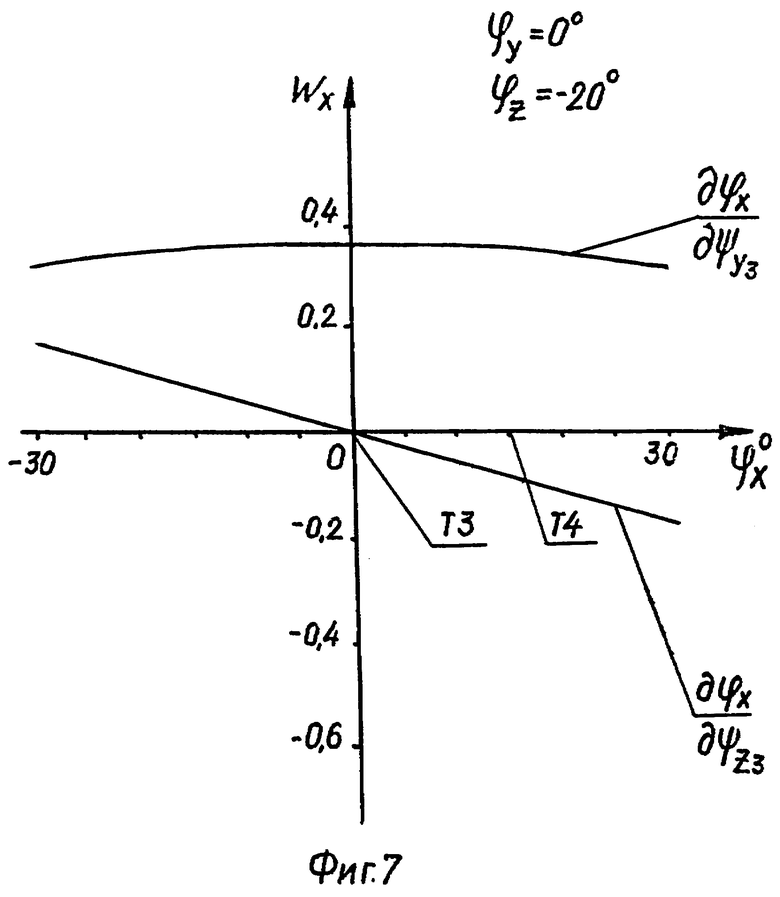
Для примера ниже будут показаны два характерных случая определения параметров Δψz3 (И3) и Δψx1 (И1) (см. Фиг.7 и Фиг.8).
На схемах Фиг.7 представлены две функциональные зависимости передаточных отношений по рассматриваемым юстировочным параметрам Δψz3; Δψx1 - 
 (других функциональных зависимостей нет).
(других функциональных зависимостей нет).
При перемещении головы оператора из точки T3 (ϕx =0; ϕy=0; ϕz=-20°) в точку T4 (ϕx=15°; ϕy=0°; ϕz=-20°) можно определить приращение погрешности Δϕx в канале ϕx, которое только зависит от юстировочного параметра Δψz3 в связи с тем, что юстировочный параметр Δψy3 при перемещении из Т3 в T4 приращения не дает, т.к. кривая  на данном участке не имеет наклона.
на данном участке не имеет наклона.
Таким образом, на основании ранее изложенного (формулы 1, 2, 3) юстировочный параметр определяется следующим образом:
где: Δϕx3, Δϕx4 - систематические погрешности канала кренового разворота в точках заданного перемещения головы оператора;
 ;
;  - передаточные отношения юстировочного параметра Δψz3 в определяемый визирной системой угол кренового разворота головы оператора в точках Т3; T4.
- передаточные отношения юстировочного параметра Δψz3 в определяемый визирной системой угол кренового разворота головы оператора в точках Т3; T4.
На схемах Фиг.8 представлен иной характерный случай выбора точек разворота головы оператора для определения следующего юстировочного параметра, в данном случае Δψx1 (И1). Как видно из схемы Фиг.8, две кривые  ;
;  имеют одинаковые характеристики, т.е. при отыскании приращения или иных характеристик представленных функциональных зависимостей не удается исключить одну из них.
имеют одинаковые характеристики, т.е. при отыскании приращения или иных характеристик представленных функциональных зависимостей не удается исключить одну из них.
В данном случае можно воспользоваться тем, что юстировочный параметр Δψy3 уже определен (см. Фиг.6 и формулы 2, 3). При этом условии две функциональные зависимости  и
и  превращаются в одну функциональную зависимость
превращаются в одну функциональную зависимость  при известной функции передаточного отношения
при известной функции передаточного отношения  .
.
На основании изложенного можно записать величину определяемого юстировочного параметра при перемещении из точки Т1 (ϕx=0; ϕy=0; ϕz=0) в точку T3 (ϕx=0; ϕy=0; ϕz=-20°) с регистрацией "n" значений углов визирования ϕy и сравнением регистрируемых значений ϕyi с априорной информацией в точках регистрации ϕyзад1(T1); ϕyзад3(T3):
где:
Δϕy1; Δϕy3 - систематические погрешности канала ϕy в точках заданного разворота головы оператора T1, Т3 (см. формулу 3).
Таким образом, выше описаны и пояснены операции предлагаемого способа юстировки нашлемной системы визирования, который включает в себя следующую последовательность описанных операций:
- устанавливают перекрестия 4 визирной системы в нулевое положение относительно базовой системы координат визира;
- жестко закрепляют на посадочные места шлема измерители 7, 8, 9 углового разворота головы оператора;
- вводят в поле зрения метки стабилизации 1, 2 горизонтальной плоскости базовой системы координат визира;
- ориентируют горизонтальную плоскость базовой системы координат параллельно горизонтальной плоскости Земли при совмещении меток стабилизации 1, 2 в поле зрения оператора и фиксируют данное положение;
- вводят в поле зрения оператора растр 3 с метками заданного разворота головы оператора;
- разворачивают голову оператора в заданные точки пространства, перемещение из которых зависит от одного юстируемого параметра;
- после каждого разворота при совмещении перекрестия 4 визира 6 с заданной меткой регистрируют "n" текущих значений углов визирования и сравнивают их с априорной информацией;
- разворачивают последовательно измерительную ось каждого измерителя 7, 8, 9 относительно осей базовой системы координат визира в направлении и на величину, однозначно определяемую измеренным рассогласованием между зарегистрированными значениями углов визирования и априорной информацией.
Принцип технической реализации предлагаемого способа юстировки описан ниже с использованием схемы, представленной на Фиг.9, на примере юстировки устройства, где:
5 - нашлемная система визирования;
6 - визир;
7, 8, 9 - измерители угловой скорости разворота головы оператора;
10 - блок измерения параметров разворота головы оператора;
11 - электронный блок;
12 - блок ориентации и задания разворота;
13 - блок ввода параметров;
14 - блок индикации юстировочных параметров;
15 - вычислитель.
В блоке измерения параметров разворота головы оператора 10 жестко установлены в посадочные места измерители 7, 8, 9 угловой скорости разворота головы оператора ( ;
; ;
; ).
).
Электронный блок 11 осуществляет определение углов визирования по измеренным угловым скоростям разворота головы оператора ( ;
; ;
; ), в соответствии с подробно описанной схемой патента Украины №30189A, кл. G 02 В 23/00, опубл. 15.11.2000 г.
), в соответствии с подробно описанной схемой патента Украины №30189A, кл. G 02 В 23/00, опубл. 15.11.2000 г.
Нашлемная система визирования 5 (один из вариантов юстируемого изделия) описана в патенте Украины 30189A, опубл. 15.11.2000 г.
Блок ориентации и задания разворота 12 представляет собой оптический коллиматорный формирователь, обеспечивающий ввод в поле зрения оператора следующих изображений для проведения операций предлагаемого способа (см. Фиг.4, 5):
- меток стабилизации (1 - пузырек уровня, 2 - окружности стабилизации);
- растра 3, задающего разворот головы оператора в заданные точки пространства, для чего обеспечена возможность поворота его вокруг осей базовой системы координат ОХУZ при совмещении ее с системой координат растра.
Состоит коллиматорный формирователь, например, из полупрозрачного зеркала, установленного перед глазом оператора, подсвеченных меток, выполненных, например, в виде стабилизирующего уровня, состоящего из пузырька 1 и окружностей 2, обрамляющих пузырек 1, и растра 3, представляющего собой набор заданных для осуществления разворота перекрестий, нанесенных на плоскую пластину. Стабилизирующий уровень и растр установлены в фокальной плоскости линзового объектива (см. Л.П.Лазарев "Оптико-электронные приборы наведения", Москва, Машиностроение, 1989 г., с.247-250). При этом вводимый в поле зрения оператора уровень может быть выполнен, например, в виде сферического фокального уровня согласно рис. 1.69, стр.253 Справочника конструктора оптико-механических приборов. М.Я.Крюгер и др., Ленинград: Машиностроение, 1980 г.
Блок ввода параметров 13, блок индикации 14 и вычислитель 15 могут быть выполнены функционально с помощью одного устройства, например компьютера типа Pentium.
Предлагаемое устройство реализации способа юстировки работает следующим образом.
В начале работы производится операция по установке перекрестия 4 визира 6 в нулевое положение относительно базовой системы координат. Бортовая система координат в свою очередь ориентируется в заданное положение, в данном примере реализации она устанавливается параллельно земной системе координат по вводимым в поле зрения меткам стабилизации (1, 2 Фиг.4, Фиг.5).
Все остальные системы координат, используемые для юстировки, при совмещении базовой системы координат по меткам стабилизации 1, 2 с земной системой также совмещаются с ней за счет предварительной установки:
- системы формирования перекрестия (ОXпYпZп - Фиг.4) - относительно базовой системы координат;
- системы растра (ОХрYрZр - Фиг.4) относительно системы стабилизации.
Установка головы оператора производится последовательно в заданные точки пространства, где в данном рассматриваемом случае должны быть произведены следующие развороты:
Т1 (ϕхзад1=0, ϕyзад1=0, ϕzзад1=0);
Т2 (ϕхзад2=15°, ϕyзад2=0, ϕzзад2=0);
Т3 (ϕхзад3=0, ϕyзад3=0, ϕzзад3=-20°);
Т4 (ϕхзад4=15°, ϕyзад4=0, ϕzзад4=-20°);
Т5 (ϕхзад5=30°, ϕyзад5=0, ϕzзад5=0).
Установка в перечисленные точки пространства головы оператора производится с помощью блока ориентации и задания разворота 12 (см. Фиг.9) при соответствующих поворотах растра 3 (см. Фиг.4, Фиг.5) относительно базовой системы координат 0ХУZ для введения углов ϕyзад; ϕzзад,а с помощью перекрестия, нанесенного на растре, - разворот ϕхзад.
Для примера работы предлагаемого устройства в процессе юстировки ниже рассмотрено однозначное определение юстировочного параметра Δψy3 для юстировки измерителя 9 (И3), определяющего величину угловой скорости  . Для определения указанного параметра Δψy3 производится операция установки головы оператора с помощью блока 12 в заданные точки пространства Т1, T3, перемещения из которых зависят только от одного юстировочного параметра Δψy3 (см. Фиг.6).
. Для определения указанного параметра Δψy3 производится операция установки головы оператора с помощью блока 12 в заданные точки пространства Т1, T3, перемещения из которых зависят только от одного юстировочного параметра Δψy3 (см. Фиг.6).
Учитывая, что процесс определения и выдачи углов визирования в любой точке пространства есть процесс непрерывный и текущие величины в каждом канале ϕх, ϕy, ϕz отличаются друг от друга в зависимости от имеющих место изменяемых погрешностей, для проведения юстировки выделяют постоянную составляющую погрешности в заданном канале, в рассматриваемом случае канал ϕх, в результате проведения следующих операций:
- регистрируют "n" текущих значений выходных углов канала ϕх электронного блока 14 юстируемого изделия, поступающих в вычислитель 15. Сигналы, подлежащие регистрации, проходят по цепи: выход 3 электронного блока 11, вход 3 вычислителя 15, где и производится регистрация при положении головы оператора в заданных точках пространства Т1 и Т3.
В точке Т1:
от ϕх1 i=1 до ϕх1 i=n,
В точке Т3:
от ϕх3 i=1 до ϕх3 i=n;
- сравнивают каждое зарегистрированное значение ϕх1i, ϕх3i с априорной информацией ϕхзад1; ϕхзад3,поступающей из блока ввода параметров 13 на вход 4 вычислителя 15.
В точке Т1:
от ϕх1i-ϕxзад1=Δϕх1i;
В точке Т3:
от ϕх3i-ϕхзад3=Δϕх3i;
- осредняют регистрируемую величину рассогласования Δϕх1i; Δϕх3i в вычислителе 15.
В точке Т1:

В точке Т3:
В результате проведения указанных операций однозначно определяют величину юстировочного разворота Δψy3 для измерителя И3 в соответствии с описанной ранее методикой (см. уравнение 2 и схему, представленную на Фиг.6):
Величины передаточных отношений  и
и  вводятся в вычислитель 15 из блока ввода параметров 13 через вход 4.
вводятся в вычислитель 15 из блока ввода параметров 13 через вход 4.
Окончание юстировки по описываемому в данном примере юстировочному параметру Δψy3 производится в результате разворота измерителя (И3) относительно оси ОY3 на известную величину и в известном направлении Δψy3. Возможно проведение юстировки по описанным юстировочным параметрам в результате их учета в рабочих алгоритмах юстируемого прибора.
Анализ предлагаемого способа юстировки нашлемном визирной системы и сравнение его со способом-прототипом и существующими аналогами показывают, что юстировка, производимая с помощью вводимого в поле зрение оператора растра 3 при выдерживании стабильного положения поля зрения по меткам стабилизации 1, 2, задает порядок разворота головы оператора в такие точки пространства, перемещение из которых однозначно определяет необходимые юстировочные параметры по регистрируемым значениям выходных углов визирования и сравнению их с априорной информацией.
Такое решение дает большой экономический эффект за счет значительного повышения точности юстировки и уменьшения времени ее проведения, обусловленных следующими факторами:
- однозначное определение юстируемых параметров;
- учет погрешностей внутреннего построения визирно-измерительной системы, в первую очередь тех частей, которые при юстировке не подлежат разборке;
- устранение необходимости применения длительных и неоднозначных операций метода последовательных приближений.
Таким образом, перечисленные факторы обеспечивают предлагаемому способу быстродействие, точность и возможность автоматизации процесса юстировки.
При этом последовательность операций и обеспечение работы предлагаемого способа в земной системе координат расширяют область его применения для любых визирных и навигационных систем, в том числе с применением различных датчиков определения положения линии визирования в заданных базовых системах координат.
Использованная литература
1. М.Я.Крюгер и др. "Справочник конструктора оптико-механических приборов", Ленинград: Машиностроение, 1980 г.
2. Л.П.Лазарев "Оптико-электронные приборы наведения", Москва: Машиностроение, 1989 г.
3. Патент Украины №30189 A.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ОСИ ВИЗИРА | 2001 |
|
RU2227924C2 |
| ОПТИКОЭЛЕКТРОННАЯ ПРИЦЕЛЬНАЯ СИСТЕМА САМОЛЕТА | 1999 |
|
RU2158406C1 |
| НАШЛЕМНАЯ СИСТЕМА ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ЛИНИИ ВИЗИРОВАНИЯ НА ЕЕ ОСНОВЕ | 2017 |
|
RU2674533C1 |
| Способ и устройство автоматической юстировки зеркальных телескопов | 2017 |
|
RU2690723C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2010 |
|
RU2464617C2 |
| СПОСОБ ПРОГРАММНО-КОРРЕКТИРУЕМОГО СОПРОВОЖДЕНИЯ ЦЕЛИ | 2022 |
|
RU2795367C1 |
| Способ согласования линии визирования оптического прибора с продольной осью наземного транспортного средства | 2017 |
|
RU2657334C1 |
| ЗАЩИЩЕННЫЙ СПОСОБ ОПТИМАЛЬНОЙ ПРИВЯЗКИ К ПОДВИЖНОЙ НАЗЕМНОЙ ЦЕЛИ | 2019 |
|
RU2713584C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2012 |
|
RU2516857C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО ПРИЦЕЛИВАНИЯ ПО ПОДВИЖНОЙ НАЗЕМНОЙ ЦЕЛИ | 2016 |
|
RU2629130C1 |

Способ юстировки нашлемной системы визирования, включающей визир и измерители угловой скорости разворота головы оператора, установленные на шлеме, включает ориентацию перекрестия визира в нулевое положение относительно базовой системы координат визира и жесткое закрепление измерителей на шлеме оператора. При этом в поле зрения оператора вводят метки стабилизации горизонтальной плоскости базовой системы координат визира, ориентируют горизонтальную плоскость базовой системы параллельно горизонтальной плоскости Земли и фиксируют ее положение. Затем вводят в поле зрения оператора растр с метками заданного разворота головы оператора и после каждого разворота при совмещении перекрестия визира с заданной меткой регистрируют n текущих значений углов визирования, сравнивают их с априорной информацией, а затем разворачивают последовательно чувствительную ось каждого измерителя относительно базовой системы координат визира в направлении и на величину, однозначно определяемую измеренным рассогласованием между зарегистрированными значениями углов визирования и априорной информацией. Обеспечивается быстродействие и точность юстировки чувствительных осей измерителей разворотов головы оператора. 9 ил.
Способ юстировки нашлемной системы визирования, включающей визир, измерители угловой скорости разворота головы оператора, установленные на шлеме, заключающийся в ориентации перекрестия визира в нулевое положение относительно базовой системы координат визира и в жестком закреплении измерителей на шлеме оператора, отличающийся тем, что вводят в поле зрения оператора метки стабилизации горизонтальной плоскости базовой системы координат визира, ориентируют горизонтальную плоскость базовой системы параллельно горизонтальной плоскости Земли и фиксируют ее положение, а затем вводят в поле зрения оператора растр с метками заданного разворота головы оператора и после каждого разворота при совмещении перекрестия визира с заданной меткой регистрируют n текущих значений углов визирования, сравнивают их с априорной информацией, а затем разворачивают последовательно чувствительную ось каждого измерителя относительно базовой системы координат визира в направлении и на величину, однозначно определяемую измеренным рассогласованием между зарегистрированными значениями углов визирования и априорной информацией.
| Счетный логарифмический диск | 1931 |
|
SU30189A1 |
| СПОСОБ КОРРЕКЦИИ ЭНДОГЕННОЙ ИНТОКСИКАЦИИ И ПРОФИЛАКТИКИ НЕЖЕЛАТЕЛЬНЫХ ПОБОЧНЫХ РЕАКЦИЙ ПРОТИВОТУБЕРКУЛЕЗНЫХ ПРЕПАРАТОВ У БОЛЬНЫХ ТУБЕРКУЛЕЗОМ | 2007 |
|
RU2347573C1 |
| US 5847976 А, 08.12.1998 | |||
| НАШЛЕМНАЯ СИСТЕМА ЦЕЛЕУКАЗАНИЯ | 2000 |
|
RU2168152C1 |

