Изобретение относится к способам получения информации о местонахождении транспортного средства (ТС) и может быть использовано для навигации, управления и борьбы с угонами (кражами) ТС.
Как известно, возможность определения текущего местоположения ТС существенно повышает вероятность возврата угнанного ТС его владельцу, способствует снижению усталости водителей и в конечном итоге - уменьшению количества аварий и дорожно-транспортных происшествий. Дополнительным преимуществом может быть более эффективное использование топлива и улучшение экологической ситуации (см., например, журнал "Мастер 12 Вольт", № 48, 2003, cc.32-37).
В настоящее время многие ТС зарубежного производства оснащаются автономными системами определения местоположения, основу которых составляют приемник глобальной спутниковой системы навигации (GPS-приемник) с выносной GPS-антенной, компактный персональный компьютер с жидкокристаллическим дисплеем как средство обработки и отображения информации и набор цифровых карт местности, например, на компакт-диске (CD) с программным обеспечением, позволяющим считывать картографические данные и отображать их на бортовом индикаторе в сопровождении семантики (надписей).
Подобные системы различной степени сложности описаны, в частности, в патентах US № 5657232, G 06 G 7/78, 12.08.1997, US № 2002/0193944, G 01 C 21/26, 19.12.2002, RU № 2173888, В 60 R 25/10, 20.09.2001, RU № 2198105, В 60 R 25/00, 20.02.2003 и многих других зарубежных и отечественных патентах.
Так, в одном из последних американских патентов US № 2003/0105587, G 01 С 21/34, 05.06.2003 описывается навигационная система для ТС, включающая в себя установленные на борту ТС GPS-приемник с GPS-антенной и дисплеем, связанный с бортовым контроллером маршрутных данных, к дополнительному входу которого подключен приемопередающий модуль, выполненный с возможностью обмена данными с интеллектуальными компьютерными пунктами наблюдения, установленными на заранее выбранных участках предполагаемого маршрута движения ТС и состоящими из работающих в реальном масштабе времени видеокамер, подключенных к блоку автоматической обработки изображений, выход которого через сервер изображений связан со стационарным приемопередающим модулем, обеспечивающим обмен данными с возимым приемопередающим модулем, установленным на борту ТС.
Используемые в данной системе интеллектуальные компьютерные пункты наблюдения, например, выпускаемые отечественным концерном "РОССИ" нейроподобные компьютерные комплексы "Rossi-MegaSense" и "ПОТОК" (ТУ 4012-014-16541985-00)", работают подобно человеческому глазу, обеспечивая:
- инвариантность к условиям освещения, позволяющую работать на открытых пространствах;
- запоминание кадров от любого события с метками времени и даты, а также индикацией мест нарушений правил дорожного движения;
- JPEG-компрессию кадров изображения;
- просмотр записанных кадров в режимах воспроизведения, шага, реального времени, а также многие другие уникальные возможности, позволяющие, в частности, обеспечить бортовую аппаратуру ТС высокоточной цифровой картографической информацией для решения задач навигации и управления.
Недостатком описанной выше навигационной системы для ТС является ее высокая стоимость. Так, цена только комплекса "Rossi-MegaSense" составляет более 1,5 тысяч долларов США (данные взяты из прайс-листа концерна "РОССИ" от апреля 2003). Кроме того, практическая реализация указанной системы требует создания соответствующей инфраструктуры и проведения строительно-монтажных работ.
Поэтому реализация описанной выше системы является делом будущего, а на практике для высокоточного определения местоположения ТС за рубежом используют цифровые карты на CD, периодически обновляемые по результатам космической и авиационной съемок поверхности Земли.
В качестве прототипа заявленного способа определения местоположения ТС выбрано одно из таких технических решений, описанное в патенте US № 2003/0177950, G 01 C 21/26, 28.11.2002. Указанный прототип представляет собой спутниковую бортовую систему навигации, в которой осуществляют следующую последовательность операций: записывают в находящуюся на борту ТС долговременную память (банк картографической информации) фрагменты карты местности, соответствующие планируемому маршруту движения ТС, в процессе прохождения ТС указанного маршрута периодически принимают на GPS-приемник сигналы глобальной спутниковой системы навигации, обрабатывают эти сигналы в соответствии с одним из используемых в указанном GPS-приемнике алгоритмов определения географических координат ТС, считывают из долговременной памяти фрагменты карты местности, соответствующие измеренным географическим координатам ТС, а также фиксируемые параметры движения ТС (скорость, пройденный путь, курсовой угол и т.п.), и осуществляют совместную обработку совокупности указанных данных в спецпроцессоре с использованием известных алгоритмов прогнозирования траектории и калмановской фильтрации, после чего отображают отметку ТС на фоне указанного фрагмента цифровой карты местности на экране бортового индикатора.
В результате реализации указанной выше последовательности операций достигают предельно высокой точности определения текущего местоположения ТС, измеряемой единицами метров. Так, например, по данным, приведенным в журнале "Мастер 12 Вольт", № 50, июль 2003, c.30-31, подобная система, установленная на немецком автомобиле "Геленваген", обеспечивает (при использовании выпускаемых за рубежом цифровых карт) точность определения географических координат не хуже 5 м.
Общими недостатками рассмотренных выше аналогов и прототипа, существенно ограничивающими их применение в российских условиях, являются высокая стоимость бортовой аппаратуры, недоступная для большей части владельцев ТС, а также:
- жесткие режимные ограничения на допустимую точность определения географических координат (не лучше 30-90 м);
- отсутствие в свободной продаже цифровых карт и программного обеспечения, требуемых для применения указанных систем.
Указанные недостатки делают практически невозможным применение на законных основаниях описанных выше систем в российских условиях. На эти особенности обращается внимание, в частности, в вышеупомянутой статье из журнала "Мастер 12 Вольт", № 50, июль 2003, c.30-31.
Предлагаемое изобретение направлено на устранение указанных недостатков. Задачами изобретения являются:
- значительное уменьшение стоимости бортовой аппаратуры;
- преодоление режимных ограничений, связанных с допустимой точностью определения географических координат;
- обеспечение возможности использования существующих отечественных карт и упрощенного программного обеспечения.
В конечном итоге предлагаемый способ определения местоположения ТС направлен на создание хотя бы минимально необходимых условий для использования отечественными автомобилистами на законных основаниях возможностей GPS-технологий.
Для решения этой задачи в известном способе, при котором в процессе движения ТС по маршруту периодически принимают на бортовой GPS-приемник сигналы глобальной спутниковой системы позиционирования, обрабатывают эти сигналы в соответствии со стандартным решением навигационных уравнений, выявляют географические координаты ТС, а местоположение ТС определяют относительно опорных ориентиров с использованием фрагментов карты местности, по которой пролегает маршрут движения ТС, осуществляют дополнительную цифровую обработку сигналов, обработанных в соответствии с решением навигационных уравнений, путем пересчета географических координат в условные координаты автодорожного атласа, представляющие собой последовательность следующих поисковых параметров: номера тома атласа, номера страницы атласа, номера условного квадрата поиска и индексов ячейки сетки условного квадрата поиска, отображают строку чисел, соответствующую указанной последовательности поисковых параметров на экране бортового индикатора, находят в автодорожном атласе фрагмент карты местности, соответствующий отображенной строке чисел, и используют этот фрагмент для определения местоположения ТС.
Решению поставленной задачи способствуют следующие частные существенные признаки.
Дополнительную цифровую обработку сигналов, обработанных в соответствии с решением навигационных уравнений, осуществляют в бортовом GPS-приемнике.
Сигналы, обработанные в соответствии со стандартным решением навигационных уравнений, передают в контроллер, в котором осуществляют их дополнительную цифровую обработку.
В качестве контроллера используют центральный блок управления или терминальное оборудование сотовой подвижной связи охранной системы ТС.
В качестве бортового индикатора используют сотовый телефон.
Сущность изобретения поясняется на фиг.1-4.
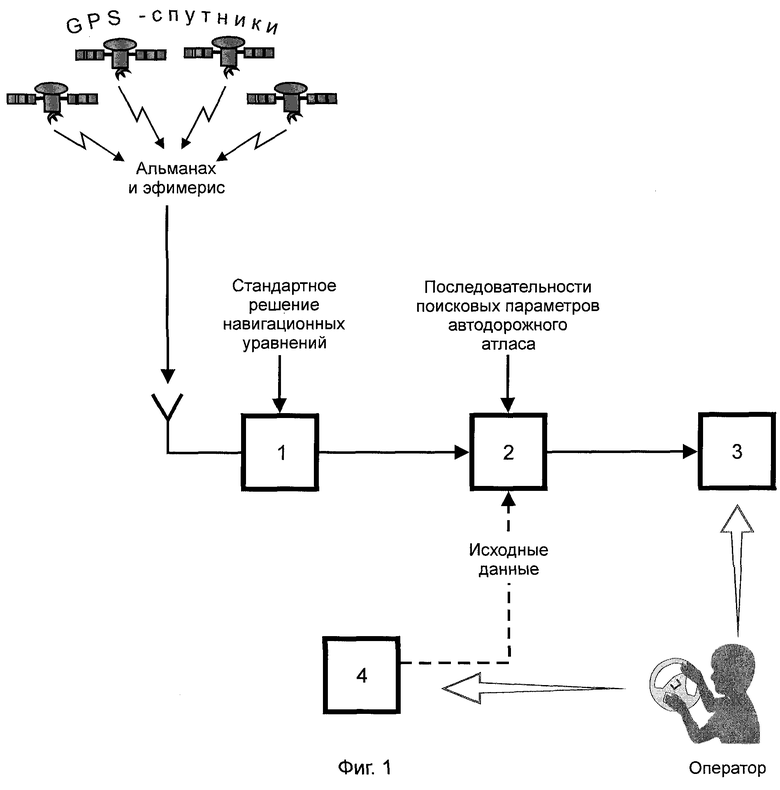
На фиг.1 приведена функциональная схема бортовой аппаратуры, реализующей заявленный способ.
На фиг.2 показана последовательность операций, представляющих заявленный способ.
На фиг.3 приведен пример обзорной схемы расположения страниц автодорожного атласа.
На фиг.4 показан внешний вид одной из страниц указанного атласа, разбитой на условные квадраты поиска с сеткой, ячейки которой индексированы по горизонтали и вертикали.
На фиг.1 использованы следующие обозначения: 1 - бортовой GPS-приемник; 2 - контроллер; 3 - бортовой индикатор; 4 - носитель фрагментов карты местности.
Рассматриваемый вариант технической реализации заявленного способа включает в себя последовательно соединенные бортовой GPS-приемник 1, контроллер 2 и бортовой индикатор 3. В качестве носителя 4 фрагментов карты местности в отличие от прототипа, в котором роль указанного носителя играл CD, используется специально изданный многотомный картографический атлас (бумажный носитель), например автодорожный атлас (атлас дорог), каждая страница которого разбита на пронумерованные условные квадраты поиска с индексированной сеткой.
Бортовой GPS-приемник 1 представляет собой законченный функциональный узел, предназначенный для приема и обработки сигналов глобальной спутниковой системы позиционирования НАВСТАР.
В частности, может быть использована доступная на коммерческом рынке функциональная плата TIM фирмы UBLOX (Швейцария), выполненная в соответствии с технологией SiRstarТМII GPS (www.u-blox.com). Указанная плата имеет размеры 2,5×2,5×3 мм и массу 3 г. Она представляет собой 12-канальный GPS-приемник, работающий при частоте поступления спутниковых сигналов 1 Гц, и имеет флэш-память на 8 Мбит. Указанная плата обеспечивает решение навигационных уравнений и позволяет сформировать на выходе готовое к построчному отображению на бортовом индикаторе 3 кодовое сообщение, содержащее, в частности, текущие географические координаты ТС (X, Y).
Выход бортового GPS-приемника 1 подключен к входу контроллера 2. В качестве контроллера 2 могут быть использованы центральный блок управления большинства серийно выпускаемых одним из предприятий-заявителей охранных систем или терминальное оборудования сотовой подвижной связи семейства REEF® GSM (модели 1000, 2000, 3000) (см., например, Каталог "Автомобильные охранные системы", 2002, "Альтоника", журнал "12 Вольт", № 3(46), 2003, c.34-37). Преобразование географических координат (X, Y) в условную "систему координат" автодорожного атласа, представляющую собой последовательность следующих поисковых параметров: номера тома, номера страницы атласа, номера условного квадрата поиска и индексов ячеек сетки, может быть осуществлено путем дополнительной цифровой обработки по исходным данным, полученным с помощью вышеупомянутого автодорожного атласа. Указанное преобразование географических координат может осуществляться и в самом GPS-приемнике, содержащем процессор для цифровой обработки информации. В этом случае необходимость в контроллере 2 отпадает.
Показанная на фиг.1 связь носителя 4 фрагментов карты местности с бортовым индикатором 3 осуществляется визуально оператором, функции которого может выполнять водитель ТС или кто-нибудь из его пассажиров. Оператор фиксирует боковым зрением вышеуказанную последовательность поисковых параметров на экране бортового индикатора 3, например, как показано на фиг.4, это ряд цифр: 12-73-27-3-10, и находит требуемый фрагмент карты местности в виде ячейки сетки на указанном условном квадрате поиска. В качестве бортового индикатора 3 может быть использован, в частности, дисплей сотового телефона.
В отличие от прототипа, в котором роль носителя 4 фрагментов карты местности выполняет CD, в рассматриваемой системе эту роль играет автодорожный атлас. Указанный атлас состоит из отдельных томов, соответствующих определенным регионам, каждый том имеет пронумерованные страницы (см. фиг.3). Каждая страница разбита на пронумерованные условные квадраты поиска, отображающие с точностью до дома фрагменты местности. Для примера на фиг.3 и 4 показан вид обзорной схемы расположения страниц аналогичного автодорожного атласа "Большая Москва", выпущенного в 2003 г., и внешний вид одной из страниц, разбитой на условные квадраты поиска, внутри которых имеется сетка с индексированными (по горизонтали и по вертикали) ячейками. Указанный атлас создан компанией "Атласы национальных дорог" с использованием геоинформационной технологии на основе крупномасштабных топографических карт Федеральной службы геодезии и картографии России. Используемые в указанном атласе условные обозначения и знаки указывают опорные ориентиры, относительно которых оператор определяет местоположение ТС. Все рассмотренные выше составные части описанного выше варианта технической реализации заявленного способа выпускаются серийно и совместимы друг с другом. Поэтому возможность практической реализации указанного варианта не вызывает сомнений.
Рассматриваемая система определения местоположения ТС работает следующим образом.
Периодически (1-2 раза в минуту) бортовой GPS-приемник 1 принимает сигналы глобальной спутниковой системы навигации. Для определения географических координат ТС (X, Y) необходимо, чтобы одновременно принимались сигналы не менее чем от четырех спутников. GPS-спутники передают два вида данных - альманах и эфимерис. Альманах содержит параметры орбит всех спутников. Каждый спутник передает альманах для всех спутников. Данные альманаха не отличаются большой точностью и действительны в течение нескольких месяцев. Данные эфимериса содержат корректировки параметров орбит и отсчета времени для каждого спутника, что необходимо для высокоточного определения координат.
Географические координаты ТС определяются в GPS-приемнике 1 путем цифровой обработки принятых сигналов в соответствии со стандартным алгоритмом решения навигационных уравнений (трилатерации, то есть вычисления местоположения объекта по результатам измерений его дальностей до точек с заданными координатами) и принятым со спутников альманахом. Информация, соответствующая географическим координатам ТС, обрабатывается в процессоре GPS-приемника или передается из GPS-приемника 1 в контроллер 2, в оперативной памяти которого хранится соответствующая программа пересчета географических координат ТС в вышеуказанную последовательность поисковых параметров. Для простоты ниже рассматривается только второй из указанных вариантов.
Исходные данные, необходимые для такого пересчета, вводятся в контроллер заранее (вручную либо с помощью специального программатора) с использованием механизма компоновки атласа. Полученная на выходе контроллера 2 информация передается в бортовой индикатор 3, например, на сотовый телефон пользователя ТС для отображения в удобном для пользователя ТС виде последовательности поисковых параметров, например, в виде ряда цифр: 12-73-27-3-10 (см. фиг.4).
Используя имеющуюся в атласе обзорную схему расположения страниц и видя на экране бортового индикатора 3 требуемую последовательность поисковых параметров, оператор имеет возможность быстро найти в заданном томе атласа требуемую страницу, условный квадрат поиска и ячейку сетки, соответствующие отображенным на бортовом индикаторе 3 поисковым параметрам, и затем с использованием местных ориентиров и соответствующих условных знаков атласа определить свое местоположение на трассе или улично-дорожной сети. Таким образом, в отличие от прототипа, в котором текущее местоположение ТС отображается автоматически на фрагменте электронной карты местности, в предлагаемом техническом решении оно определяется визуально оператором с использованием специально изданного автодорожного атласа.
Это, безусловно, приводит к некоторой временной задержке, являющейся платой за существенное упрощение (а, следовательно, удешевление) бортовой аппаратуры. Но главное заключается в том, что для реализации заявленного способа не требуется высокой точности определения географических координат (X, Y), поскольку указанные координаты используются не для определения местоположения ТС, а для выбора ячейки сетки условного квадрата поиска, соответствующей искомому фрагменту карты местности, в пределах которой предположительно находится ТС. При этом снимаются вышеупомянутые режимные ограничения и GPS-приемник может применяться в бортовой навигационной системе ТС на законных основаниях. Кроме того, картографический атлас значительно дешевле и более доступен, чем CD с цифровыми картами местности. Таким образом, заявленное техническое решение обладает новизной, полезностью и позволяет решить поставленные задачи:
- значительно уменьшить стоимость бортовой аппаратуры;
- преодолеть режимные ограничения на допустимую точность определения географических координат;
- обеспечить возможность использования существующих отечественных карт и упрощенного программного обеспечения.
В связи с этим предложенное техническое решение может быть классифицировано как изобретение.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2272255C1 |
| ОХРАННО-НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2229398C1 |
| ИНФОРМАЦИОННО-ОХРАННЫЙ КОМПЛЕКС ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2228862C1 |
| СИСТЕМА ОХРАНЫ И ПОИСКА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2008 |
|
RU2349962C1 |
| СПУТНИКОВАЯ ОХРАННО-ПОИСКОВАЯ СИСТЕМА | 2008 |
|
RU2349472C1 |
| РАДИОКАНАЛЬНАЯ СИСТЕМА ДЛЯ ПОИСКА И ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2228860C1 |
| ИНФОРМАЦИОННО-НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2005 |
|
RU2266217C1 |
| СПОСОБ ЦЕНТРАЛИЗОВАННОГО КОНТРОЛЯ СОСТОЯНИЯ И МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2007 |
|
RU2348551C1 |
| СПОСОБ МОНИТОРИНГА, СОПРОВОЖДЕНИЯ И УПРАВЛЕНИЯ НАЗЕМНЫМИ ТРАНСПОРТНЫМИ СРЕДСТВАМИ | 2005 |
|
RU2288509C1 |
| СИСТЕМА БЕЗОПАСНОСТИ, НАВИГАЦИИ И МОНИТОРИНГА ТРАНСПОРТНЫХ СРЕДСТВ | 2001 |
|
RU2175920C1 |



Изобретение относится к технике получения информации о местонахождении транспортного средства (ТС) и может быть использовано для навигации и управления ТС. В процессе движения ТС по маршруту периодически принимают на бортовой GPS-приемник сигналы глобальной спутниковой системы позиционирования, обрабатывают их стандартным решением навигационных уравнений, выявляют географические координаты ТС, а местоположение ТС определяют относительно опорных ориентиров с использованием фрагментов карты местности, по которой пролегает маршрут движения ТС. При этом над сигналами, обработанными решением навигационных уравнений, осуществляют дополнительную цифровую обработку путем пересчета географических координат в условные координаты автодорожного атласа. Условные координаты представляют собой последовательность следующих поисковых параметров: номера тома атласа, номера страницы атласа, номера условного квадрата поиска и индексов ячейки сетки условного квадрата поиска. Указанную последовательность отображают на экране бортового индикатора, находят в автодорожном атласе фрагмент карты местности, соответствующий отображенной последовательности, и используют этот фрагмент для определения местоположения ТС. Изобретение позволяет уменьшить стоимость бортовой аппаратуры, преодолеть режимные ограничения на допустимую точность определения географических координат и использовать существующие отечественные карты и программное обеспечение. 4 з.п. ф-лы, 4 ил.
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| ТЕЛЕМАТИЧЕСКИЙ ОХРАННО-ПРОТИВОУГОННЫЙ КОМПЛЕКС | 2002 |
|
RU2198105C1 |

