Изобретение относится к системам централизованной охраны транспортных средств (ТС) и может быть использовано для поиска, обнаружения, сопровождения и перехвата угнанных транспортных средств (УТС).
Известны системы охранной сигнализации, содержащие пункт (пульт) централизованного наблюдения (ПЦН) и установленные на контролируемых объектах датчики, связанные через объектовые оконечные устройства и каналы связи с ПЦН.
В состав объектовой аппаратуры может входить также приемник спутниковой системы радионавигации (GPS-приемник), позволяющий определять текущие координаты контролируемых ТС - УТС и/или ТС, используемых силами быстрого реагирования (милицией, вневедомственной охраной, частными охранными предприятиями). Выход GPS-приемника соединяется с входом объектового оконечного устройства для передачи по радиоканалу на ПЦН информации о текущем местоположении контролируемых ТС (см., например, патент US №5650770, G 08 В 25/10, 22.07.1997).
Недостатками вышеуказанных систем являются сложность и, соответственно, большая стоимость (как правило, не менее нескольких сотен долларов США) бортовой аппаратуры. Это существенно ограничивает возможности коммерческой реализации таких систем широкому кругу пользователей с небольшим или средним достатком.
Для решения этой проблемы в патенте RU №2182088, В 60 R 25/00, 10.05.2002 представлена радиоканальная система тревожной сигнализации для централизованной охраны ТС, недвижимости, людей и животных, содержащая установленные на охраняемых объектах недвижимости блоки стационарных охранных извещателей, связанные через буферные устройства со стационарными объектовыми оконечными устройствами, имеющими стационарные антенны для связи по радиоэфиру, установленные на ТС блоки возимых охранных извещателей, связанные с возимыми объектовыми оконечными устройствами, имеющими возимые антенны для связи по радиоэфиру, и находящиеся у охраняемых людей и животных носимые объектовые оконечные устройства со встроенными антеннами для связи по радиоэфиру, а также находящиеся у пользователей ТС и недвижимости персональные приемники пользователей ТС с встроенными антеннами персональных приемников для приема сообщений по радиоэфиру, центр сбора и обработки информации, имеющий пультовое оконечное устройство с антенной пультового оконечного устройства для связи по радиоэфиру, и ПЦН, в состав которого входят связанные друг с другом плата адаптера ввода информации, соединенная с пультовым оконечным устройством, процессор обработки информации, блок обработки и отображения картографической и семантической информации и принтер с адаптером принтера, вход которого соединен с процессором обработки информации, выполненным с возможностью подключения к блоку обработки и отображения картографической и семантической информации и с возможностью вывода информации на адаптер принтера, при этом ПЦН выполнен с возможностью автоматического контроля исправности радиоканала посредством отслеживания периодического поступления извещений от каждого стационарного, возимого и носимого объектовых оконечных устройств, связь по радиоэфиру выполнена в виде микросотовой сети передачи данных, содержащей базовые станции и ретрансляторы, выполненные с возможностью приема кодовых сообщений от возимых, стационарных и носимых объектовых оконечных устройств, селекции и ретрансляции указанных сообщений на ближайшие базовую станцию или ретранслятор.
Применение в вышеуказанной радиоканальной системе специализированной микросотовой сети передачи данных является, с одной стороны, достоинством указанной системы (низкая мощность излучения и, соответственно, простота и доступность бортовой абонентской аппаратуры), а с другой стороны, обуславливает ее недостаток, проявляющийся тем сильнее, чем больше требуемая зона действия системы. Он заключается в необходимости увеличения количества наземных ретрансляционных устройств пропорционально квадрату желаемого радиуса действия системы. Это усложняет инфраструктуру системы, увеличивает ее стоимость и порождает проблемы организационно-технического плана.
Указанные проблемы обусловлены, в частности, тем, что отведенный для гражданского применения частотный ресурс весьма ограничен и для развертывания микросотовой сети передачи данных на местности необходимо получить в Минсвязи России соответствующие разрешения. Кроме того, предприятие-оператор, эксплуатирующее сеть, должно иметь лицензии на услуги передачи данных и на услуги телематических служб. Для большинства разрешенных к использованию частотных диапазонов получение разрешения на использование частот для создания сети возможно лишь на вторичной основе и, как правило, в результате конкурса. Кроме того, чем больше наземных ретрансляторов применяется в системе, тем сложнее выполнить условия электромагнитной совместимости с другими радиоэлектронными средствами.
С целью ослабления влияния указанных факторов на возможность практической реализации системы в патенте RU №2198800, В 60 R 25/00, В 60 R 25/10, G 08 C 13/00, 20.02.2003, выбранном в качестве прототипа заявленного технического решения, предложена радиоканальная система сбора и обработки информации для централизованной охраны ТС, которая содержит установленные на охраняемых ТС возимые установки охранной сигнализации, выполненные с возможностью определения состояний охраняемых ТС и изменений этих состояний, формирования и передачи извещений о состояниях охраняемых ТС и извещений об изменениях этих состояний по стандартной радиосети сухопутной подвижной службы, по фрагментам микросотовой сети передачи данных и через стационарные установки охранной сигнализации, а территориально распределенные ретрансляционные узлы микросотовой сети передачи данных выполнены с возможностью приема извещений от стационарных и возимых установок охранной сигнализации, селекции указанных извещений и ретрансляции их по радиоэфиру, центр сбора и обработки информации, содержащий пультовое оконечное устройство, связанное через центральный радиомодем со стандартной, например стандарта GSM, радиосетью сухопутной подвижной службы, и ПЦН, включающий в себя адаптер ввода информации, выполненный с возможностью приема сообщений из телефонной сети, и подключенный к нему процессор обработки информации, выходы которого подключены, соответственно, к блоку обработки и отображения картографической и семантической информации и к принтеру.
Однако и данная система не свободна от недостатков. Дело в том, что в соответствии с Решением Государственной комиссии по радиочастотам (ГКРЧ) при Минсвязи России от 02.04.2001 (протокол № 7/5) установки охранной сигнализации должны работать в узком диапазоне частот 433,92 МГц ±0,2% с мощностью излучения до 10 мВт, что существенно ограничивает пропускную способность (количество одновременно сопровождаемых объектов) и снижает помехоустойчивость системы. Стандартные радиосети сухопутной подвижной службы, в частности, GSM-стандарта уязвимы по отношению к преднамеренным (умышленным) помехам, которые может применить злоумышленник. Так, согласно рекламной информации израильской фирмы NetLine серийно выпускаемый этой фирмой джаммер C-Guard LP при средней мощности излучения (5-50) мВт и массе не более 0,6 кг обеспечивает эффективное блокирование абонентских терминалов стандартных сотовых сетей подвижной связи в радиусе (5-80) м вокруг себя. Поэтому в реальной обстановке борьбы с угонами ТС, осуществляемыми, как правило, организованными и технически оснащенными преступными группами, стандартную сотовую сеть подвижной связи можно рассматривать лишь как вспомогательное средство передачи данных. Кроме того, как показала практика, эффективный перехват УТС возможен лишь в том случае, когда средства, дающие информацию о текущем местоположении УТС, работают в едином информационном контуре со средствами, обеспечивающими силы быстрого реагирования информацией об относительном местоположении УТС и ТС, используемых силами быстрого реагирования. Такой контур в системе-прототипе отсутствует, что существенно уменьшает вероятность успешного перехвата УТС.
Задачей настоящего технического решения является устранение указанных недостатков системы-прототипа, а именно увеличение пропускной способности, повышение помехозащищенности и вероятности успешного перехвата УТС силами быстрого реагирования.
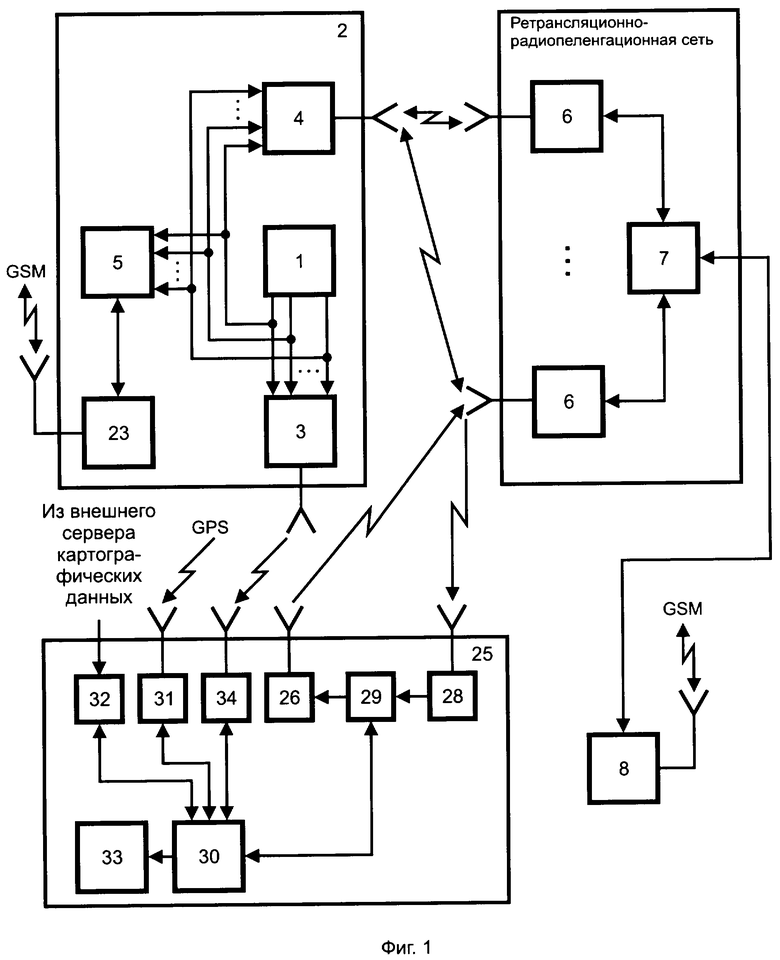
Поставленную задачу планируется решить благодаря тому, что в известной радиоканальной системе, содержащей установленные на охраняемых ТС устройства охранной сигнализации, каждое из которых содержит блок охранных извещателей, выходы которого подключены к входам объектового оконечного устройства, обеспечивающего излучение сигналов извещений с разрешенными для устройств охранной сигнализации частотой и мощностью, и к входам контроллера, связанного через возимый приемопередающий модуль со стандартной радиосетью сухопутной подвижной службы, например, стандарта GSM, а также ретрансляционные станции сотовой сети передачи данных, выполненные с возможностью приема сигналов от установленных на охраняемых ТС устройств охранной сигнализации и трансляции этих сигналов в центральный пункт управления сетью, выполненный с возможностью передачи в обратном направлении сигналов контроля и телеуправления ретрансляционными станциями сотовой сети передачи данных и устройствами охранной сигнализации, центр сбора и обработки информации, выполненный с возможностью обмена данными с центральным пунктом управления сетью и со стандартной радиосетью сухопутной подвижной службы, например, стандарта GSM, введены установки для радиопоиска УТС, установленные на ТС, используемых силами быстрого реагирования, каждая из установок для радиопоиска УТС содержит блок комплексной обработки информации, выход которого подключен к входу бортового интерфейса пользователя, и связанные с блоком комплексной обработки информации блок навигационных измерений, например GPS-приемник, бортовой радиопеленгатор, блок хранения цифровой модели местности и поисковое оконечное устройство, вход которого подключен к выходу поискового приемника, а выход - к входу поискового передающего устройства, выполненного с возможностью формирования и излучения в радиоэфир на нескольких, изменяющихся по псевдослучайному закону номиналах радиочастот, кодовых посылок, несущих информацию, необходимую для идентификации ТС по принципу "свой-чужой" и определения местоположения этого ТС, бортовой радиопеленгатор выполнен с возможностью приема по радиоэфиру сигналов объектовых оконечных устройств, установленных на охраняемых ТС, каждое устройство охранной сигнализации оснащено автономным передающим устройством, которое подключено к выходам блока охранных извещателей и выполнено с возможностью формирования и излучения в радиоэфир на нескольких, изменяющихся по псевдослучайному закону номиналах радиочастот, кодовых посылок, несущих информацию, необходимую для идентификации и определения местоположения охраняемого ТС, а каждая ретрансляционная станция сотовой сети передачи данных выполнена с возможностью радиопеленгации излучений поисковых и автономных передающих устройств и представляет собой узел ретрансляционно-радиопеленгационной сети, при этом центр сбора и обработки информации выполнен с возможностью идентификации, определения местоположения и сопровождения ТС, оборудованных устройствами охранной сигнализации или установками для радиопоиска УТС, формирования команд перехвата УТС и передачи этих команд через узлы ретрансляционно-радиопеленгационной сети на поисковые приемники.
Решению поставленной задачи способствуют следующие частные признаки заявляемого технического решения.
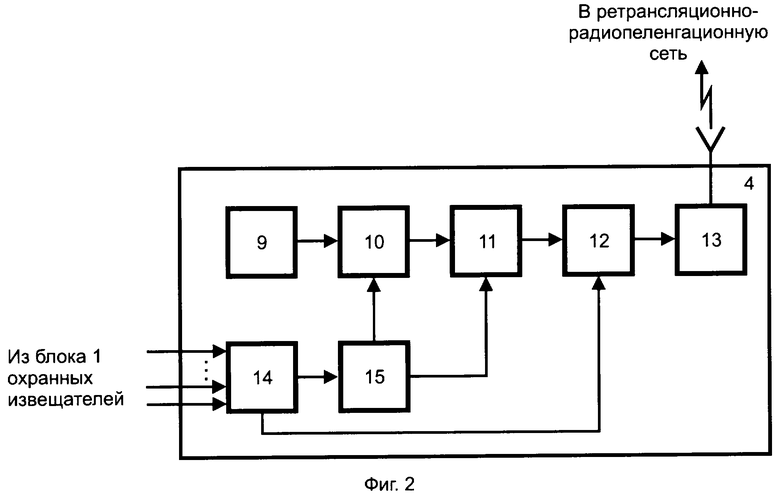
Автономное передающее устройство содержит последовательно соединенные опорный генератор, первый и второй синтезаторы, модулятор и усилитель мощности, выполненный с возможностью передачи по радиоэфиру в ретрансляционно-радиопеленгационную сеть кодовых посылок, содержащих информацию, необходимую для определения состояния и местоположения контролируемых ТС, а также последовательно соединенные блок управления и постоянное запоминающее устройство, первый выход которого подключен к управляющему входу первого синтезатора, а второй выход - к управляющему входу второго синтезатора, при этом входы блока управления являются входами автономного передающего устройства.
Центр сбора и обработки информации содержит последовательно соединенные пультовое оконечное устройство, ПЦН, блок цифровой обработки информации и блок вторичной обработки и отображения картографической и семантической информации, первый выход которого подключен к цифровому регистратору, а второй выход через блок анализа и формирования команд перехвата - ко второму входу ПЦН, а также последовательно соединенные сервер картографических данных, выполненный с возможностью ввода данных из внешнего сервера картографических данных, и блок сопряжения с цифровой моделью улично-дорожной сети, выход которого подключен ко второму входу блока вторичной обработки и отображения картографической и семантической информации, и стационарный приемопередающий модуль, выполненный с возможностью обмена данными со стандартной радиосетью сухопутной подвижной службы, например, стандарта GSM, связанный с пультовым оконечным устройством, дополнительный вход которого подключен ко второму выходу ПЦН, при этом второй выход блока цифровой обработки информации подключен к входу сервера картографических данных.
На фиг.1 представлена структурная схема предлагаемой радиоканальной системы для поиска и перехвата УТС.
На фиг.2 показана структурная схема построения автономного передающего устройства.
На фиг.3 показана структурная схема построения центра сбора и обработки информации.
На фиг.1-3 использованы следующие обозначения: 1 - блок охранных извещателей; 2 - устройство охранной сигнализации; 3 - объектовое оконечное устройство; 4 - автономное передающее устройство; 5 - контроллер; 6 - узел ретрансляционно-радиопеленгационной сети; 7 - центральный пункт управления сетью; 8 - центр сбора и обработки информации; 9 - опорный генератор; 10 - первый синтезатор; 11 - второй синтезатор; 12 - модулятор; 13 - усилитель мощности; 14 - блок управления; 15 - постоянное запоминающее устройство; 16 - пультовое оконечное устройство; 17 - ПЦН; 18 - блок цифровой обработки информации; 19 - блок вторичной обработки и отображения картографической и семантической информации; 20 - сервер картографических данных; 21 - блок сопряжения с цифровой моделью улично-дорожной сети; 22 - цифровой регистратор; 23 - возимый приемопередающий модуль; 24 - стационарный приемопередающий модуль; 25 - установка для радиопоиска УТС; 26 - поисковое передающее устройство; 27 - блок анализа и формирования команд перехвата; 28 - поисковый приемник; 29 - поисковое оконечное устройство; 30 - блок комплексной обработки информации; 31 - блок навигационных измерений; 32 - блок хранения цифровой модели местности; 33 - бортовой интерфейс пользователя; 34 - бортовой радиопеленгатор.
Блок 1 охранных извещателей, входящий в состав устройства 2 охранной сигнализации, представляет собой типовое техническое средство охранной сигнализации, предназначенное для обнаружения несанкционированного проникновения в охраняемый объект. Роль охранных извещателей могут играть датчики охранной сигнализации (датчик удара, датчик объема, концевые выключатели и др.), а также любые контрольно-измерительные приборы, позволяющие определять состояния охраняемых объектов и изменения этих состояний.
Блок 1 охранных извещателей соединен с объектовым оконечным устройством 3, автономным передающим устройством 4 и контроллером 5.
Объектовое оконечное устройство 3 предназначено для приема извещений от блока 1 охранных извещателей, преобразования принятых сигналов в требуемый для передачи формат и передачи их по каналам связи.
В качестве объектового оконечного устройства 3 может быть использован, к примеру, малогабаритный программируемый передатчик автомобильного радиопейджера "РИФ ПЕЙДЖ-100/101" (модели RP-100/101) с изменяемым (программным путем) форматом излучаемого сигнала. Указанное устройство, серийно выпускаемое предприятием-заявителем, имеет три зоны охраны, шестипроводный шлейф передатчика с управлением по четырем проводам (для модели RP-101). Оно позволяет передавать тревожные сообщения о нарушенной зоне охраны. При передаче тревожных сообщений используется ЧМ-сигнал с рабочей частотой в разрешенной для гражданского применения полосе 433,92 МГц ±0,2% и кварцевой стабилизацией частоты. Средний радиус действия объектового оконечного устройства 3 на базе вышеупомянутых моделей RP-100/101 составляет примерно 500 м при допустимой мощности излучения 10 мВт.
Автономное передающее устройство 4 использует несколько сотен номиналов радиочастот, перестраиваемых по псевдослучайному закону. Автономное передающее устройство 4 служит для приема извещений о состояниях охраняемых ТС из блока 1 охранных извещателей и передачи кодовых сообщений, соответствующих указанным извещениям, в ретрансляционно-радиопеленгационную сеть, состоящую из узлов 6 ретрансляционно-радиопеленгационной сети и центрального пункта 7 управления сетью.
Для передачи извещений в рассматриваемой системе используется, кроме того, стандартная радиосеть сухопутной подвижной службы, например, стандарта GSM, терминалами которой являются установленный на охраняемом ТС возимый приемопередающий модуль 23 и стационарный приемопередающий модуль 24, расположенный в центре 8 сбора и обработки информации. Формат данных, передаваемых объектовыми оконечными устройствами 3 и автономным передающим устройством 4, задается программным путем.
Узлы 6 ретрансляционно-радиопеленгационной сети предназначены для приема кодовых сообщений, излучаемых автономными 4 и поисковыми 26 передающими устройствами, селекции этих сообщений и ретрансляции в центральный пункт 7 управления сетью. Связь узлов 6 ретрансляционно-радиопеленгационной сети с центральным пунктом 7 управления сетью может быть как проводной, например, с помощью оптоволоконных кабелей, так и беспроводной (по радиоэфиру).
При этом в обратном направлении из центрального пункта 7 управления сетью передаются команды контроля и телеуправления узлами 6 ретрансляционно-радиопеленгационной сети.
Центральный пункт 7 управления сетью связан (по радиоэфиру или по проводам) с пультовым оконечным устройством 16, входящим в состав оборудования центра 8 сбора и обработки информации. Пультовое оконечное устройство 16 связано с ПЦН 17, выход которого подключен к входу блока 18 цифровой обработки информации. Выходы блока 18 цифровой обработки информации подключены соответственно к первому входу блока 19 вторичной обработки и отображения картографической и семантической информации и к входу сервера 20 картографических данных, который через блок 21 сопряжения с цифровой моделью улично-дорожной сети подключен к второму входу блока 19 вторичной обработки и отображения картографической и семантической информации.
В качестве ПЦН 17 может быть использован серийно выпускаемый предприятием-заявителем пульт "RS-200P", предназначенный для применения в системах централизованной радиоохраны различных объектов (торговых павильонов, складов, гаражей, дач и т.п.). ПЦН 17 имеет цифровой процессор, текстовый жидкокристаллический индикатор на 2 строки по 16 символов, реле для управления различными внешними тревожными устройствами (сиреной, устройством автодозвона и др.), а также стандартный выход для подключения различных модулей расширения (дополнительных блоков обработки и отображения информации, принтера и др.).
Все события заносятся в электронный протокол энергонезависимой памяти ПЦН "RS-200P" и могут быть просмотрены и/или выведены на печать. Под событием понимается изменение состояния охраняемого ТС (тревоги различного вида, постановка под охрану и снятие с охраны, неисправности передатчиков и др.), а также некоторые действия операторов.
В качестве возимого 23 и стационарного 24 приемопередающих модулей могут быть применены, например, модификации GSM-модуля ТС35 Terminal компании Siemens, отличающиеся друг от друга лишь различным конструктивным исполнением. Для взаимодействия с другими устройствами в них использован стандартный интерфейс RS-232, что позволяет подключать их к различным типам компьютерных терминалов, используемых в системах охранной сигнализации.
В качестве автономных передающих устройств 4, узлов 6 ретрансляционно-радиопеленгационной сети и центрального пункта 7 управления сетью могут быть использованы соответствующие узлы действующей радиоохранной системы, информация о которой представлена в Интернете на сайте предприятия-разработчика (www. arkan. spb. ru).
Блок 18 цифровой обработки информации представляет собой микропроцессорный узел, предназначенный для селекции различных видов информации (идентификационных признаков, параметров движения и текущего местоположения УТС и др.) и преобразования этой информации в вид, необходимый для ее обработки в блоке 19 вторичной обработки и отображения картографической и семантической информации с последующей интерпретацией в блоке 27 анализа и формирования команд перехвата.
Блок 19 вторичной обработки и отображения картографической и семантической информации предназначен для создания, ведения и поддержания пространственного банка данных об УТС и ТС, используемых силами быстрого реагирования. Составными частями этого банка являются векторная, семантическая и растровая базы данных. На сервере картографических данных 20 хранится банк цифровых моделей местности, например улично-дорожной сети. Управляющий вход сервера картографических данных 20 подключен ко второму выходу блока 18 цифровой обработки информации и предназначен для ввода в сервер 20 картографических данных запросов на выборку из него определенных участков цифровой модели местности, соответствующих текущим координатам контролируемых ТС. Картографическая база данных формируется с помощью внешнего сервера картографических данных и периодически (с периодом в несколько месяцев) обновляется. Выход сервера 20 картографических данных через блок 21 сопряжения с моделью улично-дорожной сети соединен со вторым входом блока 19 вторичной обработки и отображения картографической и семантической информации. Блок 21 представляет собой цифровой конвертор баз данных и предназначен для согласования формата, используемого в блоке 19 вторичной обработки и отображения картографической и семантической информации, с форматом картографических данных, хранящихся на сервере 20 картографических данных.
Векторная база данных представляет собой хранилище координатного описания объектов, подключенное через специализированный драйвер к соответствующему источнику этой информации.
Семантическая база данных является хранилищем атрибутивного описания объектов (семантические таблицы и классификаторы, связанные с одним или несколькими векторными слоями одной или нескольких векторных баз данных).
Растровая база данных представляет собой набор растровых файлов, логически объединенных в слои, подключенные через специализированные драйверы данного графического формата.
Цифровая модель местности - это графическая интерпретация математического описания данных.
Блок 19 вторичной обработки и отображения картографической и семантической информации представляет собой программно-аппаратный комплекс, включающий в себя:
- сервер картографической (векторной и растровой) информации;
- геоинформационную систему (ГИС);
- средство пользовательского доступа к пространственным данным из внешних источников;
- подсистему трехмерного моделирования;
- специализированные программные приложения (сервер семантики, редактор стилей, блок контроля топологии, сервер отображения и печати).
В полномасштабном варианте реализации рассматриваемой системы в качестве блока 19 вторичной обработки и отображения картографической и семантической информации может быть использован программно-аппаратный комплекс "Геобилдер®", серийно выпускаемый и поставляемый фирмой ПК "Геокибернетика" (сертификат соответствия №РОСС RU. KP02. С00014).
Описание и принципы функционирования программно-аппаратного комплекса "Геобилдер" представлены в фирменном материале "Комплекс программных средств GeoBuilder", 2002 г. и на сайте предприятия-производителя www.geobuilder.ru. Возможны и упрощенные варианты построения блока 19, при которых возможности комплекса "Геобилдер" используются частично. Блок 27 анализа и формирования команд перехвата представляет собой автоматизированное рабочее место оператора.
Различные варианты построения блока 27 анализа и формирования команд перехвата представлены, например, в описании патента US №2002/0103622, G 06 F 15/00, 01.08.2002. Выбор конкретного варианта построения блока 27 анализа и формирования команд перехвата зависит от условий практической реализации предлагаемой системы и не является предметом настоящего изобретения.
К блоку 19 вторичной обработки и отображения картографической и семантической информации подключен цифровой регистратор 22, предназначенный для вывода информации о контролируемых ТС и о состоянии различных функциональных узлов рассматриваемой системы для документирования и хранения в бумажном или в каком-либо другом виде. Роль цифрового регистратора 22 может выполнять обычный принтер для персонального компьютера.
Другие используемые в центре 8 сбора и обработки информации блоки и узлы представляют собой стандартные изделия электронно-вычислительной техники, применяемые в серийно выпускаемых радиоэлектронных средствах.
Установка 25 для радиопоиска УТС, расположенная на борту ТС, используемого силами быстрого реагирования, включает в себя:
- поисковое передающее устройство 26, поисковый приемник 28 и поисковое оконечное устройство 29, обеспечивающие возможность определения местоположения ТС, используемого силами быстрого реагирования, относительно центра 8 сбора и обработки информации;
- блок 30 комплексной обработки информации, блок 31 навигационных измерений, блок 32 хранения цифровой модели местности и бортовой интерфейс 33 пользователя, обеспечивающие сбор, обработку и визуализацию навигационной информации;
- бортовой радиопеленгатор 34, обеспечивающий определение местоположения ТС, используемого силами быстрого реагирования, относительно УТС, являющегося объектом перехвата.
Блок 31 навигационных измерений, обеспечивающий автономное определения текущего местоположения ТС в географической системе координат, как правило, выполняют в виде GPS-приемника. Блок 31 навигационных измерений связан с блоком 30 комплексной обработки информации. Примером практической реализации такого технического решения является, например, система TRACER, описанная в журнале "12 Вольт", 2001, №1.
Поисковый приемник 28 предназначен для приема по радиоэфиру внешних целеуказаний и команд перехвата, транслируемых узлами 6 ретрансляционно-радиопеленгационной сети, и передачи их через поисковое оконечное устройство 29 в блок 30 комплексной обработки информации и в поисковое передающее устройство 26. Поисковое оконечное устройство 29 аналогично объектовому оконечному устройству 3, используемому в устройствах 2 охранной сигнализации, и отличается от последнего лишь количеством входов (один вместо нескольких - по количеству шлейфов). Поисковое передающее устройство 26 отличается от автономного передающего устройства 4 также наличием только одного входа.
Блок 32 хранения цифровой модели местности аналогичен по построению серверу 20 картографических данных и отличается от последнего лишь меньшим объемом долговременной памяти.
Бортовой интерфейс пользователя 33 представляет собой дисплей на жидких кристаллах, применяемый, например, в носимых компьютерах типа Ноутбук. В последние годы такими дисплеями оснащается большинство автомобилей зарубежного производства (см., например, сайт журнала "За рулем" в Интернете).
Бортовые радиопеленгаторы 34, которые могут быть использованы в установках 25 для радиопоиска УТС, серийно выпускаются фирмой-заявителем под торговой маркой "РИФ ФАЙНДЕР-800" (сертификат соответствия №РОСС.RU.МЕ30.В00721). Указанный бортовой радиопеленгатор 34 предназначен для установки на автомобиле для определения относительных координат (дальности и угла направления) другого автомобиля (движущегося или неподвижного), на котором установлено объектовое оконечное устройство, работающее на разрешенных частотах 433,92 МГц ±0,2% с мощностью излучения до 10 мВт.
Рассматриваемая радиоканальная система для поиска и перехвата УТС работает следующим образом.
Работа системы требует обеспечения возможности излучения кодовых посылок с УТС. Активация этого излучения производится в автоматическом режиме при срабатывании каких-либо датчиков в блоке 1 охранных извещателей, входящем в состав устройства 2 охранной сигнализации. Это свидетельствует о несанкционированном воздействии на ТС и/или о его угоне.
Тревожный сигнал, формируемый блоком 1 охранных извещателей, поступает одновременно в объектовое оконечное устройство 3, в автономное передающее устройство 4 и в контроллер 5. Из автономного передающего устройства 4 тревожный сигнал излучается в эфир в виде тревожного сообщения, которое принимается одним или несколькими узлами 6 ретрансляционно-радио-пеленгационной сети, из которых оно поступает в центральный пункт 7 управления сетью.
Автономные передающие устройства 4 обеспечивают излучение последовательностей радиоимпульсов, которые несут в себе информацию об идентификационных признаках данного УТС (см. выше).
Формирование указанных последовательностей осуществляется по стандартной схеме (см. фиг.2), включающей в себя цепь: "опорный генератор 9, первый 10 и второй 11 синтезаторы, модулятор 12 и усилитель мощности 13", и управляющую цепочку, состоящую из последовательно включенных блока управления 14 и постоянного запоминающего устройства 15. Управляющие воздействия в виде извещений из блока 1 охранных извещателей поступают на входы блока управления 14, являющиеся входами всего автономного передающего устройства 4. В блоке управления 14 по этим воздействиям выделяются определенные адреса ячеек постоянного запоминающего устройства 15, в которых хранятся коды выделенных номиналов модулирующих частот. Сигналы постоянного запоминающего устройства 15 управляют работой первого 10 и второго 11 синтезаторов. При этом блок управления 14 одновременно управляет модулятором 12. В результате на вход усилителя мощности 13 поступает сигнал с изменяемой по псевдослучайному закону несущей, модулированной кодовыми последовательностями импульсов, несущими информацию об идентификационных признаках УТС. После усиления в усилителе 13 мощности этот сигнал излучается в эфир.
Для определения текущего местоположения УТС относительно центра 8 сбора и обработки информации используется метод амплитудной пеленгации сигналов, излучаемых автономным передающим устройством 4. Идентификационные признаки данного УТС определяются частотными и временными параметрами принятых сигналов, которые заранее устанавливаются в автономном передающем устройстве 4 программным путем (при записи в постоянное запоминающее устройство 15).
С помощью ретрансляционно-радиопеленгационной сети осуществляется радиослежение за УТС в выделенной полосе частот. При обнаружении излучения какого-либо автономного передающего устройства 4 одним или несколькими узлами 6 ретрансляционно-радиопеленгационной сети в указанных узлах автоматически измеряются энергетические и частотные параметры принятых сигналов и фиксируются моменты приема излучений. Результаты указанных измерений передаются в центральный пункт 7 управления сетью по радиоэфиру или по проводным каналам связи. Центральный пункт 7 управления сетью осуществляет:
- прием информации от узлов 6 ретрансляционно-радиопеленгационной сети;
- идентификацию контролируемых УТС;
- определение текущего местоположения контролируемых УТС относительно центрального пункта 7 управления сетью;
- формирование кодовых сообщений, содержащих информацию об идентификационных признаках контролируемых УТС, их текущем местоположении и о координатах узлов 6 ретрансляционно-радиопеленгационной сети, ретранслировавших исходное тревожное сообщение;
передачу указанных кодовых сообщений в центр 8 сбора и обработки информации;
- формирование и передачу сигналов контроля и телеуправления узлами 6 ретрансляционно-радиопеленгационной сети, а через них - автономными передающими устройствами 4.
В центре 8 сбора и обработки информации (см. фиг.3) каждое кодовое сообщение принимается пультовым оконечным устройством 16 и передается в ПЦН 17. ПЦН 17 переходит при этом в состояние ТРЕВОГА. Вначале селектируется информация, содержащая идентификационные признаки УТС (государственный номер, марка, цвет, данные о владельце и пр.). Затем эта информация ставится в соответствие информации о текущих координатах УТС относительно наземного центра 8 сбора и обработки информации.
Эта информация подается на вход блока 18 цифровой обработки информации, где из нее формируется кодовое сообщение, несущее необходимые данные для поиска и сопровождения данного УТС.
Указанное кодовое сообщение подается в блок 19 вторичной обработки и отображения картографической и семантической информации.
Одновременно в блоке 18 цифровой обработки информации формируется запрос на вызов из сервера 20 картографических данных участка цифровой модели улично-дорожной сети, соответствующего текущим "грубым" координатам УТС. Вызванная из сервера 20 картографических данных информация преобразуется в требуемый формат в блоке 21 сопряжения с цифровой моделью улично-дорожной сети и поступает в блок 19 вторичной обработки и отображения картографической и семантической информации.
В блоке 19 вторичной обработки и отображения картографической и семантической информации эти данные обрабатываются и отображаются в соответствии с используемой ГИС-технологией. Результатом обработки является наглядное представление на экране монитора, входящего в состав блока 19 вторичной обработки и отображения картографической и семантической информации, отметок сопровождаемых УТС на фоне карты-схемы улично-дорожной сети обслуживаемого района в сопровождении текстовой информации (например, указываются цвет, государственный номер и марка УТС, его географические координаты, данные о владельце и т.п.). Указанные данные обновляются с периодом, определяемым условиями устойчивого сопровождения контролируемого УТС на улично-дорожной сети. Одновременно могут сопровождаться несколько УТС.
На цифровой регистратор 22 из блока 19 вторичной обработки и отображения картографической и семантической информации выводится лишь та информация, которая необходима для документирования и долговременного хранения (на диске, магнитной ленте или в бумажном виде).
Для повышения устойчивости работы системы информацию, содержащую идентификационные признаки УТС, передают также по стандартной радиосети подвижной службы, например по сотовой сети стандарта GSM. Эту функцию выполняют входящий в состав устройств 2 охранной сигнализации возимый приемопередающий модуль 23 и установленный в центре 8 сбора и обработки информации стационарный приемопередающий модуль 24. Кодовые сообщения, содержащие идентификационные признаки УТС (хранящиеся в памяти контроллера 5), поступают в приемопередающий модуль 23 из контроллера 5, излучаются в радиоэфир и после прохождения по GSM-сети поступают через стационарный приемопередающий модуль 27 в пультовое оконечное устройство 16. Далее, обработка и отображение указанных кодовых сообщений осуществляются так же, как и при описанной выше процедуре использования ретрансляционно-радиопеленгационной сети.
Управление ТС, используемое силами быстрого реагирования, осуществляется следующим образом.
После взятия УТС на сопровождение и получения подтверждения о том, что данное ТС действительно находится в угоне, оператор центра 8 сбора и обработки информации выдает экипажам ТС, используемых силами быстрого реагирования, данные о местоположении и идентификационных признаках УТС (начальное внешнее целеуказание). Конкретный способ получения подтверждения и передачи внешних целеуказаний не существенен для заявленного технического решения и поэтому в данной заявке не описывается.
Получив внешнее целеуказание, оператор установки 25 для радиопоиска УТС включает поисковое передающее устройство 26, входящее в состав указанной установки. Так же, как и автономное передающее устройство 4, входящее в состав устройства 2 охранной сигнализации на борту УТС, поисковое передающее устройство 26 обеспечивает излучение помехозащищенных последовательностей радиоимпульсов на изменяющейся по псевдослучайному закону несущей частоте. В данном случае эти последовательности несут информацию об идентификационных признаках данного ТС, используемого силами быстрого реагирования (государственный номер, состав экипажа и т.п.) для перехвата заданного УТС. Операции по формированию указанных последовательностей радиоимпульсов, по их излучению в эфир, радиопеленгации поисковых передающих устройств 26, являющихся источниками указанных излучений, передаче полученных данных из центрального пункта 7 сетью в центр 8 сбора и обработки информации, по обработке и отображению данных о ТС, используемых силами быстрого реагирования для перехвата заданного УТС, аналогичны операциям, осуществляемым при поиске и сопровождении УТС (см. выше).
В результате осуществления указанной последовательности действий по формированию, передаче и обработке сигналов оператор центра 8 сбора и обработки информации получает возможность наблюдать на экране монитора блока 19 вторичной обработки и отображения картографической и семантической информации перемещающиеся друг относительно друга (на фоне карты-схемы улично-дорожной сети) отметку УТС и отметки ТС, используемых силами быстрого реагирования. Координаты указанных отметок поступают в блок 27 анализа и формирования команд перехвата, в котором рассчитываются оптимальные маршруты перехвата и формируются соответствующие последовательности команд (текущие внешние целеуказания), которые передаются в ПЦН 17. В ПЦН 17 указанные внешние целеуказания преобразуются в стандартные извещения и через пультовое оконечное устройство 16 передаются в центральный пункт 7 управления сетью, который ретранслирует их на узлы 6 ретрансляционно-радиопеленгационной сети, ближайшие к ТС, используемый силами быстрого реагирования для осуществления перехвата заданного УТС.
Узлы 6 ретрансляционно-радиопеленгационной сети осуществляют передачу указанных извещений на изменяемой по псевдослучайному закону несущей. Извещения принимаются поисковым приемником 28 и передаются в поисковое оконечное устройство 29. В поисковом оконечном устройстве 29 из указанных извещений выделяется составляющая, несущая информацию об идентификационных признаках и местоположении контролируемого УТС - объекта перехвата (информационная составляющая), которая передается в блок 30 комплексной обработки информации. Одновременно в поисковом оконечном устройстве 29 формируется служебный сигнал подтверждения приема внешнего целеуказания, который через поисковое передающее устройство 26 излучается в эфир. Сигнал подтверждения принимается узлами 6 ретрансляционно-радиопеленгационной сети и передается в центральный пункт 7 управления сетью. При неполучении сигналов подтверждения центральный пункт 7 управления сетью повторяет трансляцию извещений, используя другие узлы 6 ретрансляционно-радиопеленгационной сети, до получения необходимых подтверждений их приема заданными установками 25 для радиопоиска УТС.
Для повышения точности определения текущих координат ТС, используемых силами быстрого реагирования, на борту каждого из них осуществляется автономное определение собственного местоположения (географических координат) с привязкой их к цифровой модели местности. Автономное местоопределение осуществляют с помощью блока 31 навигационных измерений, например, GPS-приемника - по сигналам глобальной спутниковой системы радионавигации (GPS).
Из блока 31 навигационных измерений информация, позволяющая определить текущие географические координаты ТС, поступает в блок 30 комплексной обработки информации, в котором по совокупности измеренных навигационных параметров определяется текущее местоположение ТС, используемого силами быстрого реагирования, то есть решается система навигационных уравнений (навигационная задача).
Решение навигационных уравнений в блоке 30 комплексной обработки информации производится с некоторой заранее выбранной частотой. Например, при использовании в качестве блока 31 навигационных измерений GPS-приемника дважды в секунду, то есть с частотой получения спутниковых радионавигационных сигналов.
Дополнительную информацию для повышения точности определения местонахождения ТС и его устойчивого сопровождения дает цифровая модель местности (улично-дорожной сети) в виде набора линейных сегментов и узлов, хранящаяся в блоке 32 хранения цифровой модели местности. Навигационная задача может быть решена при этом различными способами. Например, при использовании аппаратуры и методов определения местоположения ТС, приведенных в патенте US №2002/0193944, G 01 С 21/26, 19.12.2002, осуществляют:
- расчет координат точек нахождения ТС на основе алгоритмов, использующих вышеуказанную цифровую модель местности (улично-дорожной сети);
- расчет требуемого количества точек определения координат ТС на основе алгоритмов, зависящих от вида используемых навигационных измерений;
- определение наиболее вероятного местоположения ТС исходя из принятого критерия оптимизации решения навигационной задачи;
- построение и сглаживание траектории движения сопровождаемого ТС с использованием алгоритмов оптимальной фильтрации.
В качестве оптимального решения навигационной задачи могут быть выбраны, например, координаты местоположения последнего сегмента дороги, в пределах которого были измерены координаты сопровождаемого ТС. Результирующая точность определения местоположения ТС при этом возрастает благодаря уменьшению размеров области неопределенности положения ТС.
Количество точек определения местоположения ТС выбирается в зависимости от разности между рассчитанным по данным GPS-приемника углом направления движения ТС и экстраполированным углом направления линейного сегмента дороги, на котором в данный момент находится ТС.
Текущее местоположение ТС, а также необходимые текстовые данные отображаются на экране бортового интерфейса 33 пользователя и используются экипажем сил быстрого реагирования для ускорения перехвата УТС.
Примером практической реализации вышеуказанных методов навигации ТС для перехвата заданного УТС является алгоритм работы вышеупомянутой системы TRACER, описанный в журнале "12 Вольт", 2001, №1. Для определения плоскостных координат и скорости движения ТС в указанной системе используется спутниковая навигация, а для передачи тревожных сообщений и навигационных данных - стандартная сотовая сеть подвижной связи. Принимая радионавигационные сигналы на блок 31 навигационных измерений не менее, чем от трех спутников, блок 30 комплексной обработки информации вычисляет плоскостные координаты ТС, которые накладываются на оцифрованную электронную карту местности. Указанная карта с изображением отметок сопровождаемого УТС отображается на бортовом интерфейсе 33 пользователя и используется при перехвате УТС. Бортовой комплект аппаратуры системы TRACER представляет собой малогабаритный конструктивный узел с встроенными блоком 30 комплексной обработки информации, GPS-приемником и GSM-модулем. В блоке 30 комплексной обработки информации используется ГИС-система, обеспечивающая оперативность, наглядность отображения относительного местоположения УТС и ТС, используемого силами быстрого реагирования, и соответственно удобство управления процессом перехвата заданного УТС силами быстрого реагирования. При отсутствии приема спутниковых сигналов траектория движения ТС пролонгируется с использованием имеющейся цифровой модели местности (улично-дорожной сети) и алгоритмов оптимальной фильтрации.
Однако достижение высокой точности определения местоположения ТС, используемых силами быстрого реагирования, еще недостаточно для эффективного перехвата УТС. Дело в том, что как показали многочисленные экспериментальные исследования, среднестатистическая ошибка радиопеленгационных методов определения местоположения подвижных объектов в городских условиях значительно превышает расчетные значения. В основном это связано с влиянием элементов городской застройки на прохождение сигналов (эффектами экранирования, дифракции радиоволн и пр.). Поэтому на практике точность определения местоположения УТС, не имеющего на борту высокоточных автономных средств навигационных измерений, только с помощью ретрансляционно-радиопеленгационной сети составляет в лучшем случае 150-200 м. Этого недостаточно для эффективного перехвата УТС, несмотря на высокую точность определения координат ТС, используемого силами быстрого реагирования. С другой стороны, введение в состав устройств 2 охранной сигнализации высокоточных навигационных измерителей, например GPS-приемника, существенно удорожает аппаратуру устройства 2 охранной сигнализации и делает ее недоступной для пользователя со средним уровнем доходов.
Выход из данного положения заключается в применении на заключительном участке перехвата УТС бортового радиопеленгатора 34. Когда ТС, используемое силами быстрого реагирования, приближается к заданному УТС на расстояние, соответствующее ошибке внешнего целеуказания, наступает заключительная стадия перехвата. В этом случае для достижения необходимой (порядка нескольких метров) точности определения относительных координат УТС и ТС, осуществляющего перехват, используется радиопеленгация УТС в диапазоне частот 433,92 МГц ±0,2% при мощности излучения до 10 мВт, разрешенных для устройств охранной сигнализации (см выше).
Радиопеленгацию УТС на заключительном участке осуществляют по сигналам, излучаемым объектовым оконечным устройством 3. Указанные сигналы принимают бортовым радиопеленгатором 34 и передают в блок 30 комплексной обработки информации. Бортовой радиопеленгатор 34 включается автоматически после получения соответствующей команды из блока 30 комплексной обработки информации, формируемой после сокращения относительного расстояния между УТС и ТС, используемого силами быстрого реагирования, заданного значения, соответствующего точности пеленгации УТС узлами 6 ретрансляционно-радиопеленгационной сети.
Использование сигналов бортового радиопеленгатора 34 для уточнения ранее полученного решения навигационной задачи позволяет достичь необходимой точности (единиц метров) определения относительных координат УТС и ТС, используемых силами быстрого реагирования. Указанное уточненное решение навигационной задачи получается алгоритмически в блоке 30 комплексной обработки информации. Выходные результаты отображаются на дисплее бортового интерфейса пользователя 33 и используются экипажем сил быстрого реагирования для высокоточного наведения ТС на заключительной стадии перехвата контролируемого УТС.
Таким образом, объединение описанных выше функциональных узлов радиоэлектронной аппаратуры в единый, работающий в реальном масштабе времени контур поиска, обнаружения, сопровождения и перехвата УТС порождает качественно новые свойства заявленной системы по сравнению с системой-прототипом, позволяя решить поставленную задачу, а именно увеличить пропускную способность и помехоустойчивость системы, а также повысить вероятность перехвата УТС.
Все элементы заявляемой системы выпускаются серийно и доступны на коммерческом рынке, причем большая их часть производится предприятием-заявителем. Поэтому возможность практической реализации предлагаемого технического решения не вызывает сомнений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАДИОПОИСКА И ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2004 |
|
RU2253578C1 |
| РАДИОКАНАЛЬНАЯ СИСТЕМА МОНИТОРИНГА И СОПРОВОЖДЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2004 |
|
RU2240938C1 |
| РАДИОПЕЛЕНГАЦИОННАЯ СИСТЕМА ДЛЯ ПОИСКА И СОПРОВОЖДЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2005 |
|
RU2264937C1 |
| СПОСОБ ЦЕНТРАЛИЗОВАННОГО КОНТРОЛЯ СОСТОЯНИЯ И МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2007 |
|
RU2348551C1 |
| СИСТЕМА ДЛЯ ПОИСКА И ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2004 |
|
RU2258618C1 |
| СИСТЕМА МОНИТОРИНГА ТРАНСПОРТНЫХ СРЕДСТВ И ОБЪЕКТОВ НЕДВИЖИМОСТИ | 2004 |
|
RU2243113C1 |
| РАДИОКАНАЛЬНАЯ СИСТЕМА СБОРА И ОБРАБОТКИ ИНФОРМАЦИИ ДЛЯ ЦЕНТРАЛИЗОВАННОЙ ОХРАНЫ ОБЪЕКТОВ НЕДВИЖИМОСТИ, ТРАНСПОРТНЫХ СРЕДСТВ, ЛЮДЕЙ И ЖИВОТНЫХ | 2003 |
|
RU2216463C1 |
| ИНФОРМАЦИОННО-ОХРАННАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНЫХ СРЕДСТВ И ОБЪЕКТОВ НЕДВИЖИМОСТИ | 2004 |
|
RU2244641C1 |
| РАДИОКАНАЛЬНАЯ СИСТЕМА СБОРА И ОБРАБОТКИ ИНФОРМАЦИИ ДЛЯ СОПРОВОЖДЕНИЯ, МОНИТОРИНГА И ЦЕНТРАЛИЗОВАННОЙ ОХРАНЫ ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2220859C1 |
| СПОСОБ ЦЕНТРАЛИЗОВАННОЙ РАДИООХРАНЫ С ИСПОЛЬЗОВАНИЕМ ПАТРУЛЬНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2003 |
|
RU2238590C1 |

Изобретение относится к системам централизованной охраны транспортных средств (ТС). На ТС установлены устройства охранной сигнализации, в которых приемопередающий модуль связан по эфиру с радиосетью сухопутной подвижной службы, например стандарта GSM, а автономное передающее устройство излучает в эфир кодовые посылки с информацией для идентификации и определения местоположения ТС. На ТС сил быстрого реагирования имеются установки для радиопоиска угнанных ТС. Каждая из них содержит поисковый приемник, поисковое передающее устройство, излучающее в эфир кодовые посылки с информацией для идентификации ТС по принципу "свой-чужой" и определения местоположения ТС, а также бортовой пеленгатор, связанный по эфиру с объектовыми оконечными устройствами ТС. Ретрансляционно-радиопеленгационная сеть пеленгует излучения поисковых и автономных передающих устройств и транслирует извещения на центральный пункт управления. Центр сбора и обработки информации обменивается данными с этим пунктом и с радиосетью сухопутной подвижной службы и обеспечивает идентификацию, определение местоположения и сопровождение ТС, оборудованных устройствами охранной сигнализации и установками для радиопоиска угнанных ТС, а также передает команды перехвата угнанных ТС через узлы ретрансляционно-радиопеленгационной сети на поисковые приемники. Система характеризуется повышенными пропускной способностью и помехоустойчивостью и увеличивает вероятность перехвата угнанных ТС. 2 з.п. ф-лы, 3 ил.
| РАДИОКАНАЛЬНАЯ СИСТЕМА СБОРА И ОБРАБОТКИ ИНФОРМАЦИИ ДЛЯ ЦЕНТРАЛИЗОВАННОЙ ОХРАНЫ ТРАНСПОРТНЫХ СРЕДСТВ, НЕДВИЖИМОСТИ, ЛЮДЕЙ И ЖИВОТНЫХ | 2002 |
|
RU2198800C1 |

