Изобретение относится к области стрелково-пушечного (СП) вооружения, к приемам и средствам прицеливания СП оружием при угрозе поражения его носителей ракетами противника, а более конкретно к способам прицеливания оружием огневой защиты его носителей с радиолокационным прицелом (РЛП), преимущественно доплеровским.
Изобретение может быть использовано с оружием огневой защиты в основном мобильных зенитных ракетно-пушечных комплексов, самолетов, вертолетов, катеров, танков и др. носителей, имеющих РЛП и способных вести заградительный огонь по обнаруженной и угрожающей ракете - цели.
Прицеливание - общеизвестный прием для СП оружия (1).
Известно, что в условиях отсутствия оптической видимости прицеливание осуществляют путем радиовизирования цели (РВЦ) по дальности, скорости и угловым координатам цели относительно носителя СП оружия (2), (3).
Для РВЦ обычно применяют радиолокационные устройства, которые являются составной частью РЛП оружия огневой защиты, например, таких носителей, как самолеты (4) или мобильные зенитные ракетно-пушечные комплексы (5).
Результаты РВЦ вводят в счетно-решающий прибор (СРП) РЛП, с помощью которого управляют стволом СП оружия, в основном скорострельными пушками или крупнокалиберными пулеметами (6). Огневой защитой носителя служат выстреливаемые снаряды или пули (7).
Согласно (2), (6), (7) известный способ прицеливания оружием огневой защиты носителя с РЛП заключается в обеспечении радиолокационного визирования цели, использовании его результатов для расчета с помощью СРП точек встречи снарядов или пуль с целью и в наводке ствола оружия в эти расчетные точки с учетом предполагаемой траектории полета снарядов или пуль.
Известный способ прицеливания реализован, например, с РЛП, содержащим радиолокатор обнаружения и сопровождения, выходы которого по дальности, скорости сближения и угловым координатам цели, а также выходы датчиков внешней среды подключены к соответствующим входам СРП, управляющего установкой наводки на цель стволов оружия огневой защиты (7).
Известный способ прицеливания применяют с различными типами радиолокационных устройств, однако доплеровские радиолокационные устройства в силу известных причин в настоящее время имеют преимущественное применение в РЛП мобильных носителей, перечисленных выше.
Известный способ, описанный в источниках (6) и (7), по технической сущности является наиболее близким к заявленному объекту и служит его прототипом.
Однако вышеуказанный способ имеет недостаточную точность прицеливания, которая связана с разбросом фактических траекторий снарядов или пуль от атмосферных условий (высоты, влаги, ветра) и кучности стрельбы, связанной с качеством боеприпасов и состоянием ствола оружия. По этим причинам траекторные ошибки стрельбы являются основными и даже при высоком разрешении РВЦ по дальности, скорости сближения и угловым координатам цели огневая защита носителя осуществляется с большими издержками, требующими многоствольного оружия и повышенного расхода боеприпасов. Так, например, по данным (6) для огневой защиты бомбардировщика В-58 (США) от ракет “воздух-воздух” применяют шестиствольную пушку “Вулкан” с темпом стрельбы до 6000 выстрелов в минуту.
Таким образом, решаемой задачей данного изобретения является повышение точности прицеливания оружием огневой защиты носителя с РЛП и обеспечение возможности снижения издержек за счет снижения расхода боеприпасов и применения более легкого СП оружия.
Поставленная задача достигается тем, что в способе, заключающемся в обеспечении РВЦ, расчете по его результатам с помощью СРП точек встречи снарядов или пуль с целью и наводке ствола СП оружия в эти расчетные точки с учетом предполагаемой траекторий полета снарядов или пуль, с начала стрельбы производят радиолокационное визирование выстреливаемых снарядов или пуль (РВС), соосное с РВЦ, при этом фиксируют известными средствами моменты каждого выстрела, измеряют радиолокационными средствами скорости удаления снарядов или пуль и их угловое отклонение от опорной линии визирования сопровождаемой цели и, учитывая время выстрелов, вычисляют в СРП не менее одной усредненной точки траектории полета снарядов или пуль, по которой корректируют первоначальную наводку ствола оружия на цель.
Для случая одной усредненной точки траектории полета снарядов или пуль ее измерение производят на дальности сопровождаемой цели, а корректировку первоначальной наводки ствола оружия производят по углам промаха, за которые принимают несовпадение усредненной точки траектории полета снарядов или пуль с опорной линией визирования сопровождаемой цели.
Другой вариант способа, отличается тем, что РВС производят на резонансной или близкой к ней частоте отражений снарядов или пуль.
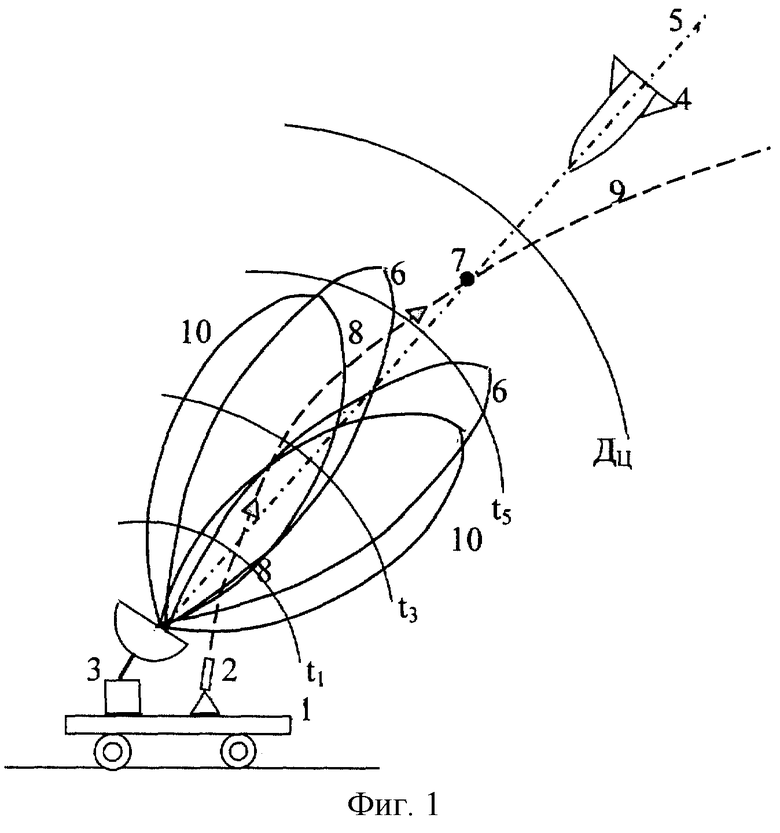
На фиг.1 изображена схема огневой защиты на примере мобильного наземного носителя СП оружия.
На фиг.2 изображена часть спектра отраженных сигналов при работе радиолокатора РЛП.
На фиг.3 изображена полоса частот, перекрываемых системой фильтрации по скорости удаления снарядов или пуль.
На фиг.4 изображена диаграмма изменения скоростей снарядов или пуль и импульсы временных стробов для траекторных измерений по дистанции стрельбы.
На фиг.5 изображен разрез луча радиолокатора РЛП в картинной плоскости. (Согласно (8) - плоскости, перпендикулярной к равносигнальному направлению и проходящей через цель).
На фиг.6 изображены условные траекторные скорости и угловые отклонения снарядов или пуль по дистанции стрельбы.
Возможность реализации заявляемого способа, например, для прицеливания по самонаводящейся на радиолокатор РЛП ракете типа “Шрайк” (АСМ-45 по классификации США) заключается в следующем (фиг.1).
Мобильный носитель 1 оружия 2 с РЛП 3 облучает радиоимпульсами цель - ракету 4, находящуюся на линии 5 равносигнального направления лучей 6 антенны радиолокатора РЛП 3 в режиме РВЦ. На дальности ДЦ, соответствующей максимальной дальности стрельбы оружия 2, известным приемом с помощью СРП РЛП 3 вычисляют точку 7 встречи цели 4 и снаряда 8 с учетом предполагаемой траектории 9 его движения и соответственно наводят ствол оружия 2 (первоначальная наводка).
С момента начала стрельбы производят РВС, соосное с линией 5 равносигнального направления для РВЦ. Соосное РВС и РВЦ возможно как в случае применения радиолокаторов, например двухдиапазонных, имеющих общую антенну с разными лучами 6 и 10, так и в случае применения радиолокатора с антенной, имеющей один из этих лучей.
Измерение скоростей для РВЦ и РВС производят с помощью радиолокатора РЛП 3 по доплеровскому сдвигу fД частот, излучаемых (f0) и принятых радиосигналов (f0 ± fД), используя известную формулу  где V - скорость цели или снаряда, С - скорость света.
где V - скорость цели или снаряда, С - скорость света.
В спектре принятых сигналов импульсно-доплеровского радиолокатора (фиг.2) сигналы цели UЦ(f0+fДЦ) и снарядов UС(f0-fДС) находятся справа и слева от сигналов UN(f0). Это обстоятельство позволяет осуществлять прием отраженных сигналов и выделять сигналы цели и снарядов по скорости их удаления и угловому отклонению одновременно приемниками двух угловых дискриминаторов радиолокатора РЛП или поочередно - одним.
Облучение цели - ракеты 4 и снарядов 8 может производиться на разных частотах, причем для РВС предпочтительны резонансные или близкие к ним частоты отражений, особенно для применения малокалиберного оружия.
Для обеспечения РВС с использованием эффекта Доплера в радиолокаторе РЛП должна предусматриваться система фильтрации, например, в виде полосовых фильтров, перекрывающая диапазон возможного разброса доплеровских частот ΔfДС от fДС max до fДС min, соответствующих разбросу VС скоростей удаления снарядов или пуль по дистанции стрельбы (фиг.3).
С момента каждого выстрела из ствола оружия 1, которые фиксируют известными средствами, например с помощью датчиков на стволе оружия, измеряют стандартными средствами РЛП типа счетчиков времени время нахождения снаряда 8 на дистанции стрельбы, например, в моменты времени t1, t3, t5, и t7, которые в сумме с интервалами времени t2, t4 и t6 составляют время tС (фиг.4) прохождения (пролета) снарядом или пулей дистанции ДЦ (фиг.1).
Указанные моменты времени для каждого снаряда или пули отмечают вырабатываемыми внутри радиолокатора РЛП видеоимпульсами τ1, τ2...τn, с помощью которых затем опрашивают выходы системы фильтрации для частот от fДС max до fДС min, соответственно для траекторных точек скоростей VС снарядов или пуль от VС max до VС min (фиг.4), которые определяют также с помощью стандартных средств РЛП, например по номерам фильтров fДС.
Используя эти измерения скоростей VС и отрезки времени tS после каждого выстрела, измеряют известным образом в СРП дальность до каждого снаряда или пули (ДС=VС·tS). Измерение угловых отклонений снарядов или пуль от линии РВЦ производят с помощью углового дискриминатора радиолокатора РЛП, работающего в режиме РВС с использованием частот fДС.
Для РВЦ с автосопровождением по угловым координатам (ϕУК) обычно используют угловой дискриминатор моноимпульсного радиолокатора РЛП 3. Когда обеспечивается автосопровождение по (ϕУК), напряжение сигнала ошибки на его выходе практически отсутствует и равносигнальное направление соответствует линии визирования цели (точка ОЦ на фиг.5).
Для РВС автосопровождения по (ϕУК) не требуется, т.к. разнополярные скорости (сближение с целью и удаление снарядов или пуль) позволяют использовать линию визирования цели в режиме РВЦ как опорную для отсчета отклонений ΔϕС снарядов 8 или пуль от линии 5 равносигнального направления. В режиме РВС отсчеты по азимуту (A3) и углу места (УМ) производят по значениям ΔϕС A3 и ΔϕС УМ в моменты времени от t1 до t7 (фиг.4), по которым находят средние значения ΔϕУК A3 и ΔϕУК УМ в этих точках траектории (фиг.6).
По результатам измерений ΔVС, ΔϕУК A3, ΔϕУК УМ в точках ts1, ts3, tS7 и tS за время tС прохождения пути дистанции ДЦ стрельбы каждым одним снарядом или пулей с помощью СПР определяют не менее одной усредненной точки или всю фактическую усредненную траекторию полета снаряда или пуль (фиг.6), и по ней корректируют первоначальную наводку ствола оружия на цель. Необходимость ограничить измерения одной усредненной точкой траектории возникает тогда, когда подлетное время цели - ракеты еще обеспечивает возможность стрельбы по ней или стрельба ведется с угловым упреждением, в результате чего РВС становится возможным только на дальности сопровождаемой цели. В этом случае точка ОС (фиг.5) траектории в картинной плоскости является центром площади SРС рассеяния снарядов или пуль и ее несовпадение с точкой ОЦ линии РВЦ соответствует углу промаха, который используется для корректировки первоначальной наводки ствола оружия на цель.
Таким образом, особенностью предлагаемого способа является то, что первоначальное наведение ствола оружия с учетом предполагаемой траектории полета снарядов или пуль корректируют по их фактической усредненной траектории, которую измеряют по времени удаления снарядов или пуль от ствола оружия, по скорости их полета и углового отклонения от линии визирования цели. При этом угловое отклонение траектории снарядов или пуль измеряют в разомкнутом контуре углового сопровождения снарядов или пуль, принимая за опорное значение направление на цель - ракету в замкнутом контуре ее углового сопровождения. Для случая стрельбы с угловым упреждением корректировку первоначальной наводки ствола оружия на цель производят по углам промаха на дальности цели.
Точность измерения углов промаха предлагаемым способом ограничивается в основном точностью углового визирования цели-ракеты и точностью измерения углов визирования снарядов или пуль. Точность измерения времени их полета определяется точностью отсчета времени, которая может быть достаточно высокой.
В результате использования изобретения существенно повышается точность прицеливания оружием огневой защиты и вероятность поражения угрожающей ракеты-цели, в том числе и на курсах ракеты, требующих стрельбы с угловым упреждением. Обеспечивается возможность использования более легкого СП оружия и с меньшим расходом боеприпасов. Возможно применение малокалиберного вооружения. Возможно использование стандартных радиолокационных средств РЛП.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Большая Советская Энциклопедия. 2-е изд. Том 34. Прицеливание. с.с.547, 548.
2. А.П. Вержиковский и др. Краткий словарь по радиоэлектронике. М., Воениздат, 1964. Радиолокационный визир - с.с.160, 161. Радиолокационный прицел - с.162.
3. Основы радиоуправления. Под ред. В.А. Вейцеля и В.Н. Типугина. Учебное пособие для вузов. М., “Сов. Радио”, 1973, 464 с. Радиовизиры цели и управляемых снарядов, с.28.
4. Бортовые радиолокационные системы. Пер. с англ. Под ред. К.Н. Трофимова. М., Воениздат, 1964, 672 с.
5. Зенитные ракетные и ракетно-пушечные комплексы капиталистических стран. (Обзор по материалам иностранной печати). Под ред. Е.А. Федосова. М., НИЦ (770), 1986, 249 с. (ГосНИИАС).
6. Радиолокационные устройства (Теория и практика построения). Под ред. В.В. Григорина - Рябова. М., изд. “Сов. радио”, 1970, 680 с.
7. Там же. Радиолокационный прицел, с.с.588...590. Функциональная схема радиолокационного прицела. Рис.21.25.
8. П.И.Дудник и Ю.И.Чересов. Авиационные радиолокационные устройства, М., ВВИА им. Н.Е. Жуковского, 1986, с.284, с.285 (Картинная плоскость).
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС ПРОТИВОВОЗДУШНОЙ РАКЕТНО-КОСМИЧЕСКОЙ ОБОРОНЫ | 2002 |
|
RU2227892C1 |
| СИСТЕМА ПРИЦЕЛИВАНИЯ ОРУЖИЯ | 2021 |
|
RU2784528C1 |
| СПОСОБ СТРЕЛЬБЫ С ПАЛУБНОЙ ПУСКОВОЙ УСТАНОВКИ ПРОТИВОЛОДОЧНОГО РАКЕТНОГО КОМПЛЕКСА | 1995 |
|
RU2093783C1 |
| СПОСОБ ОБУЧЕНИЯ ОПЕРАТОРОВ ТАНКОВОГО ВООРУЖЕНИЯ | 2011 |
|
RU2483271C2 |
| СПОСОБ БОКОВОЙ СТРЕЛЬБЫ ОГНЕВЫМИ СРЕДСТВАМИ ПОРАЖЕНИЯ ЦЕЛЕЙ С ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2740828C1 |
| СПОСОБ ОБУЧЕНИЯ ОПЕРАТОРОВ ТАНКОВОГО ВООРУЖЕНИЯ | 2011 |
|
RU2472095C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2213927C1 |
| ПАТРОН ДЛЯ СНАЙПЕРСКОГО ОРУЖИЯ | 2014 |
|
RU2552406C1 |
| СПОСОБ РОБОТИЗИРОВАННОГО ОБЕСПЕЧЕНИЯ ПРИМЕНЕНИЯ ВЫСОКОТОЧНОГО ОРУЖИЯ | 2013 |
|
RU2551390C1 |
| Способ вывода вращающейся по углу крена ракеты с гироскопом направления в зону захвата цели головкой самонаведения и система для его осуществления | 2017 |
|
RU2659622C1 |





Изобретение относится к области стрелково-пушечного вооружения, в частности к способам прицеливания. Сущность изобретения заключается в том, что с начала стрельбы производят радиолокационное визирование выстреливаемых снарядов или пуль, соосное с радиолокационным визированием цели. Моменты каждого выстрела фиксируют, измеряют радиолокационными средствами скорости удаления снарядов или пуль и их угловое отклонение от опорной линии визирования сопровождаемой цели. С учетом времени выстрелов вычисляют с помощью счетно-решающего прибора не менее одной усредненной точки траектории полета снарядов или пуль, по которой корректируют первоначальную наводку ствола оружия на цель. Реализация изобретения позволяет повысить точность прицеливания. 2 з.п. ф-лы, 6 ил.
| Под ред | |||
| В.В | |||
| ГРИГОРИНА-РЯБОВА | |||
| Радиолокационные устройства | |||
| - М.: Сов | |||
| радио, 1970, с.588-590 | |||
| РАДИОЛОКАЦИОННАЯ УСТАНОВКА | 1994 |
|
RU2090825C1 |
| Способ получения пиросульфита натрия | 1981 |
|
SU1108072A1 |
| СПОСОБ ПРИГОТОВЛЕНИЯ ПИВА | 1996 |
|
RU2103341C1 |
| ЭЛЕКТРОМАГНИТНЫЙ НАСОС | 2004 |
|
RU2330990C2 |
| DE 3816050 A1, 23.11.1989. | |||

