Предлагаемое изобретение относится к системам автоматического регулирования, а конкретно, к системам стабилизации и наведения артиллерийского вооружения, установленного на подвижных носителях, например блока оружия боевой машины пехоты (БМП).
Известны системы стабилизации и наведения, применяемые для управления вооружением танков, например, примененные в системе управления огнем 1А42 [1], в которых при необходимости ведения фланговой стрельбы с хода [2] по движущейся цели наводчик определяет дальность до цели, определяет величину упреждения, учитывая величину взаимного изменения направления движения цели и танка, а затем вручную, удерживая прицельную марку с выносом от цели на величину выбранного упреждения, производит выстрел. При этом значительно увеличивается время подготовки выстрела, что снижает эффективность стрельбы при маневрировании танка, особенно при движении "по змейке".
Известна также система стабилизации и наведения, в которой использован способ обеспечения прицельной стрельбы с хода при фланговых перемещениях танка [3], выбранная за прототип, которая содержит (фиг.1) последовательно соединенные пульт управления 5, прицел 4, сумматор 6 и исполнительный привод 7.
В систему введен баллистический вычислитель 3, электрически связанный с датчиком крена 2 и дальномером 1, а также счетно-решающий прибор 10, первый вход которого подключен к баллистическому вычислителю 3, причем сигнал на этом входе пропорционален дальности до цели D. Второй вход счетно-решающего прибора 10 подключен к датчику угла 8, сигнал которого пропорционален синусу курсового угла β движения танка. Третий вход счетно-решающего прибора 10 подключен к датчику пути 9, сигнал которого пропорционален пройденному танком пути L. К управляющему входу счетно-решающего прибора 10 подключен выключатель 11, а выход счетно-решающего прибора соединен с третьим входом прицела 4.
Система работает следующим образом. Режим ввода поправки осуществляется (в виде дополнительной скорости слежения за целью) периодически по команде от выключателя 11 с установленным временем такта. На каждом такте происходит считывание величины текущей дальности до цели D, а также величины sinβ и запоминание их в счетно-решающем приборе 10. По сигналу датчика пути 9 измеряется приращение пути L, пройденного танком за время каждого такта, и запоминается в конце такта в счетно-решающем приборе 10. Счетно-решающий прибор 10 вычисляет динамическую поправку в соответствии с математической зависимостью:

где Δβ - динамическая поправка;
β - курсовой угол;
L - пройденный путь;
D - дальность до цели.
Динамическая поправка вводится в прицел 4, смещая пушку в упрежденную точку относительно прицельной марки.
Недостатком данной системы является необходимость измерения дальности до цели, как минимум, два раза до введения поправки. Однако дальность до цели можно измерить только после наведения марки прицела на цель и удержания ее на цели в течение времени, необходимого для обеспечения процесса измерения дальности. Получается, что до введения динамической поправки на фланговое смещение наводчик должен обнаружить цель, навести и удерживать марку прицела на цели и только потом проводится измерение дальности и появляется поправка на фланговое смещение.
Таким образом, данная система не обеспечивает условия обнаружения цели и наведения марки прицела на цель при фланговом перемещении танка или БМП.
Предлагаемое техническое решение направлено на обеспечение условий обнаружения цели при фланговом маневре носителя (танка или БМП) за счет формирования сигнала дополнительной скорости наведения, обеспечивающей стабилизацию поля зрения прицела на регулируемой дальности.
Сущность предлагаемого технического решения заключается в том, что в систему стабилизации и наведения, содержащую пульт управления, прицел и исполнительный привод, введены последовательно соединенные датчик скорости носителя, усилитель-модулятор, датчик относительного угла поворота объекта управления с вращающимся трансформатором, демодулятор, управляемый делитель и коммутатор, при этом пульт управления соединен с первым входом прицела, второй и третий входы которого соответственно соединены с выходом исполнительного привода и выходом коммутатора, а выход прицела соединен с исполнительным приводом.
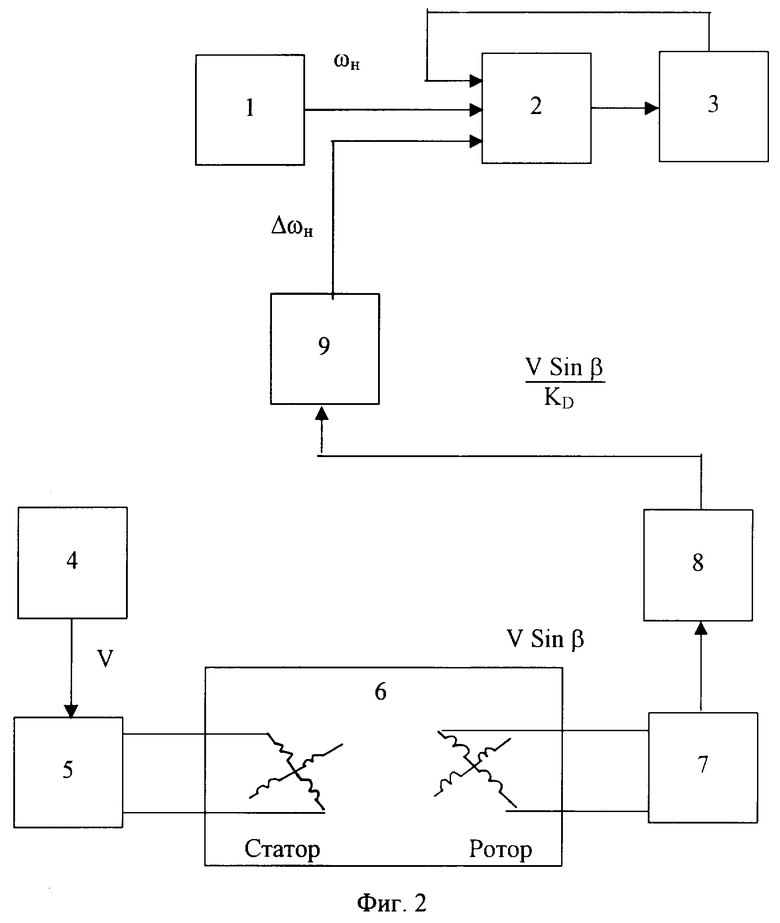
Материалы заявки поясняются чертежами, где на фиг.1 представлена блочная схема системы стабилизации и наведения, принятая за прототип; на фиг.2 представлена блочная схема предлагаемой системы стабилизации и наведения; на фиг.3 представлена схема компенсации влияния флангового маневра на поле зрения прицела.
Сведения, подтверждающие возможность осуществления предлагаемого технического решения с получением вышеуказанного технического результата, заключаются в следующем.
Предлагаемая система стабилизации и наведения (фиг.2) состоит из последовательно соединенных пульта управления 1, прицела 2 и исполнительного привода 3, выход которого соединен со вторым входом прицела 2. Кроме того, система содержит последовательно соединенные датчик скорости носителя 4, усилитель-модулятор 5, вращающийся трансформатор датчика 6 относительного угла поворота объекта управления, демодулятор 7, управляемый делитель 8 и коммутатор 9, причем выход коммутатора 9 соединен с третьим входом прицела 2.
Предлагаемая система работает следующим образом.
В режиме формирования сигнала дополнительной скорости наведения статорная обмотка вращающегося трансформатора датчика относительного угла поворота объекта управления 6 запитывается промодулированным и усиленным в усилителе-модуляторе 5 напряжением сигнала скорости движения, поступающим от датчика скорости носителя 4. На выходе синусной обмотки ротора вращающегося трансформатора датчика 6 получаем сигнал, пропорциональный произведению скорости движения V и синуса угла поворота башни относительно корпуса носителя - sinβ. Эти сигналы проходят через демодулятор 7 на управляемый делитель 8. В качестве управляемого делителя 8, который определяет дальность стабилизации поля зрения прицела при маневре носителя, использован переменный резистор, установленный на корпусе пульта управления. Положение полностью выведенного резистора соответствует нулевому значению дополнительной скорости наведения Δωн, соответствующего максимальной дальности наблюдения, при которой угол колебаний поля зрения прицела при маневре близок к нулю. При введении переменного резистора управляемого делителя 8 уменьшается дальность стабилизированного наблюдения и при маневре стабилизируется поле зрения прицела на некоторой дальности, соответствующей выставленному положению переменного резистора управляемого делителя 8. Причем эта дальность стабилизации поля зрения прицела не зависит от параметров маневра носителя. Устройство работает во всем диапазоне углов положения башни относительно корпуса носителя, т.е. в диапазоне углов 360°, а также при любом знаке скорости движения.
Таким образом, компенсация влияния флангового маневра на поле зрения прицела обеспечивается введением в сигнал скорости наводки ωн поправки Δωн, вычисленной по формуле:
где Δωн - поправка на скорость наводки, обеспечивающая стабилизацию поля зрения прицела при фланговом перемещении носителя;
VТ - скорость движения носителя;
β - курсовой угол, угол между направлением движения носителя и направлением пушки и башни в горизонтальной плоскости;
Kd - коэффициент, пропорциональный дальности до цели (выставляется управляемым делителем 8).
Схема, поясняющая работу устройства компенсации влияния флангового маневра на поле зрения прицела, представлена на фиг.3. На схеме носитель (БМП) движется по "змейке" А-А′. При этом центр поля зрения стабилизированного прицела перемещается в пределах между линиями АВ и А′В′. Угловые перемещения ориентиров в поле зрения при маневре будут зависеть от дальности их нахождения от движущейся БМП. При включении коммутатором 9 устройства компенсации и установки регулировочного резистора управляемого делителя 8 в положение, соответствующее дальности D1, положение ориентиров, находящихся на линии С-С′, будет неподвижным, а в пространстве между БМП и линией С-С′ колебания ориентиров будут уменьшены, причем величины этих колебаний заключаются в треугольнике АОА′. На дальности D1 колебания ориентиров будут близки к нулю, а на дальностях, превышающих D1, колебания ориентиров вновь увеличиваются, причем их смещение в поле зрения прицела будет противоположным по сравнению с положением, имевшим место до включения устройства компенсации.
Предлагаемое техническое решение проверено электронным моделированием, а также экспериментальной проверкой в макетном образце модернизированного стабилизатора вооружения БМП. Испытания показали, что предлагаемое устройство компенсации влияния флангового маневра на поле зрения прицела осуществляет формирование сигнала дополнительной скорости наведения Δωн, обеспечивающей стабилизацию поля зрения прицела на регулируемой дальности при фланговом маневре БМП, что существенно улучшает условия работы наводчика.
По результатам экспериментальной проверки предлагаемое техническое решение введено в документацию модернизированного стабилизатора блока оружия перспективной БМП.
Источники информации
1. Корнеев В.В. Танковые автоматические системы. Стабилизаторы и исполнительные приводы танкового вооружения. - М.: АБТВ, 1968, с. 17.
2. Правила стрельбы из танков (ПСТ-90). - М.: Военное издательство, 1991, с. 26-27.
3. Патент № 2190822 (приоритет от 10.07.2000).
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ И СТАБИЛИЗАТОР ВООРУЖЕНИЯ | 2007 |
|
RU2360208C2 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ | 2007 |
|
RU2351876C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ С ЗАКРЫТЫХ ПОЗИЦИЙ ПО НЕНАБЛЮДАЕМОЙ ЦЕЛИ И СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ ДЛЯ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2444693C2 |
| УСТРОЙСТВО ДЛЯ ПРИЦЕЛИВАНИЯ | 1993 |
|
RU2074366C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2006 |
|
RU2324134C1 |
| СПОСОБ УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2005 |
|
RU2298759C1 |
| СПОСОБ УПРАВЛЕНИЯ ВООРУЖЕНИЕМ | 2004 |
|
RU2275581C1 |
| Система управления огнем боевой машины и блок управления автоматикой | 2018 |
|
RU2718186C1 |
| УСТРОЙСТВО ДЛЯ ПРИЦЕЛИВАНИЯ | 1993 |
|
RU2077019C1 |
| Система управления огнем боевой машины | 2022 |
|
RU2785804C1 |

Изобретение относится к системам автоматического регулирования, а конкретно, к системам стабилизации и наведения артиллерийского вооружения, установленного на подвижных носителях, например блока оружия боевой машины пехоты (БМП). Технический результат - обнаружение цели при фланговом маневре танка или БМП. Сущность предлагаемого технического решения заключается в том, что в систему стабилизации и наведения, содержащую последовательно соединенные пульт управления, прицел и исполнительный привод, выход которого соединен со вторым входом прицела, введены последовательно соединенные датчик скорости носителя, усилитель-модулятор, вращающийся трансформатор датчика относительного угла поворота объекта управления, демодулятор, управляемый делитель и коммутатор, причем выход коммутатора соединен с третьим входом прицела. 3 ил.

Система стабилизации и наведения, содержащая пульт управления, прицел и исполнительный привод, отличающаяся тем, что она снабжена последовательно соединенными датчиком скорости носителя, усилителем-модулятором, датчиком относительного угла поворота объекта управления с вращающимся трансформатором, демодулятором, управляемым делителем и коммутатором, при этом пульт управления соединен с первым входом прицела, второй и третий входы которого соответственно соединены с выходом исполнительного привода и выходом коммутатора, а выход прицела соединен с исполнительным приводом.
| СПОСОБ ОБЕСПЕЧЕНИЯ ПРИЦЕЛЬНОЙ СТРЕЛЬБЫ С ХОДА ПРИ ФЛАНГОВЫХ ПЕРЕМЕЩЕНИЯХ ТАНКА | 2000 |
|
RU2190822C2 |
| DE 1913406, 01.10.1970 | |||
| US 4172409, 30.10.1979 | |||
| АЛМАЗНЫЙ ИНСТРУМЕНТ ДЛЯ ПРАВКИ ШЛИФОВАЛЬНЫХ КРУГОВ | 2007 |
|
RU2354532C1 |

