Изобретение относится к области вооружения, в частности к системе управления огнем боевой машины, которая может быть использована для поражения быстро перемещающихся целей.
Системы управления огнем (СУО) широко распространены в военной технике: в танках, самоходных артиллерийских установках и корабельных установках. В большинстве системы управления огнем предназначены для стрельбы с места или при прямолинейном движении боевой машины для поражения целей на небольших дальностях с относительно небольшими скоростями. Так как в этих случаях за время полета снаряда относительные перемещения боевой машины и цели малы, такие системы управления огнем обычно оперируют небольшими поправками, учитывающими относительные перемещения цели и отклонения полета снаряда из-за внешних факторов.
Известны различные варианты построения СУО.
СУО танка Т-80У - комплекс 1А45 (см. техническое описание БЛ1.335.066ТО) содержит дневной прицел 1Г46 и ночной прицельный комплекс Т01-К01 с прицелом ТПН-4 (см. техническое описание БЛ1.335.055ТО). Дневной прицел имеет независимую стабилизацию поля зрения в плоскости вертикального (ВН) и горизонтального (ГН) наведения. Ночной прицел ТПН-4 имеет зависимую стабилизацию в обеих плоскостях.
Недостатками данного варианта СУО являются большие погрешности стабилизации поля зрения ночного прицела (срединная ошибка на уровне 0,6 мрад), что затрудняет наблюдение и прицеливание в движении. Угол прицеливания в ночном прицеле вводится вручную путем смещения прицельной сетки. Так как зеркало прицела механически связано с орудием, не может быть использован режим автоматического ввода углов прицеливания и бокового упреждения в привода орудия и башни, что снижает эффективность применения вооружения.
Известен также вариант СУО танка Т-80У, где в состав комплекса 1А45 вместе с дневным прицелом 1Г46 входит тепловизионный прицел Т01-П02 (см. техническое описание БЛ1.335.078ТО). Дневной прицел наводчика 1Г46 установлен в башне танка и включает гиростабилизирующие устройства, датчики угла, вертикальное и горизонтальное зеркала. Указанные элементы обеспечивают независимую стабилизацию поля зрения и линии прицеливания в плоскости ВН и ГН. Стабилизация линии прицеливания в плоскости ВН осуществляется гиростабилизатором, наружная рамка которого посредством кинематической передачи связана с вертикальным зеркалом. Гироскоп, обеспечивая стабилизацию линии прицеливания, одновременно выполняет роль датчика угла системы стабилизации орудия. Для этого ротор датчика угла связан с вертикальным зеркалом, а статор датчика угла крепится на корпусе гиростабилизатора, который кинематически связан с орудием параллелограммным механизмом. Стабилизация орудия в плоскости ВН осуществляется относительно линии прицеливания. При движении танка привод ВН по сигналу датчика угла автоматически воздействует на орудие, установленное в цапфенных узлах башни, стремясь придать ему положение, согласованное с линией прицеливания. Стабилизация линии прицеливания в плоскости ГН осуществляется гиростабилизатором, кинематически связанным с горизонтальным зеркалом. Угол поворота башни с орудием относительно линии прицеливания в плоскости ГН измеряется датчиком угла, ротор которого кинематически связан с горизонтальным зеркалом, а статор жестко соединен с корпусом прицела и башней. Сигнал с датчика угла, пропорциональный углу рассогласования линии прицеливания и оси канала ствола орудия, поступает на вход привода ГН, который автоматически воздействует на башню и устраняет рассогласование, стремясь придать башне с орудием положение, согласованное с линией прицеливания. Тепловизионный прицел Т01-П02 установлен в башне танка, при этом горизонтальная ось зеркала прицела связана с осью качания орудия посредством механизма связи, представляющего собой систему тяг с подшипниковыми узлами и промежуточным валом. Таким образом осуществляется зависимая стабилизация поля зрения тепловизионного прицела вместе с орудием в плоскости ВН и ГН. Углы прицеливания и бокового упреждения вводятся в привод вертикального наведения (ВН) и привод горизонтального наведения (ГН) соответственно по сигналам баллистического вычислителя.
К недостаткам рассматриваемой системы следует отнести:
- низкую точность зависимой стабилизации поля зрения тепловизионного прицела (срединная ошибка до 0,4 мрад в плоскости ВН и до 0,6 мрад в плоскости ГН), что затрудняет наблюдение и прицеливание при движении боевой машины;
- затягивание времени подготовки выстрела при работе с тепловизионным прицелом, так как невозможно производить слежение за целью и дальнометрирование в процессе цикла автоматического заряжания, когда орудие стопорится на угле заряжания;
- ограниченные возможности по управлению вооружением от тепловизионного прицела, обусловленные низкой точностью синхронного слежения линий визирования дневного и тепловизионного прицелов.
Известна системам управления огнем (RU 2187060 C2, кл. F41G5/14, F41 G3/22, опубл. 10.08.2002 г.) с дневным и ночным прицелами, имеющими независимую стабилизацию полей зрения в плоскостях вертикального и горизонтального наведения. Схема управления полями зрения прицелов в СУО выполнена таким образом, что постоянно обеспечивается совмещение и синхронное перемещение линий визирования двух прицелов. Таким образом, удалось объединить два автономно работающих прицела в единый прицельный комплекс и одновременно использовать их технические возможности. Погрешность совмещения и синхронного слежения линий визирования двух прицелов в такой СУО не превышает 0,5 угл. мин. во всем диапазоне углов прокачки орудия. Этого удалось достичь за счет введения в схему СУО двух корректоров. Первый позволяет устранить погрешность синхронного слежения, обусловленную неточностью их установки в башне из-за непараллельности посадочных поверхностей. Второй корректор компенсирует погрешность передачи угла от датчика положения орудия и датчика угла плоскости вертикального наведения дневного прицела, обусловленную неточностью работы механизмов передачи угла. Система обеспечивает возможность эффективного использования вооружения танка днем и ночью.
Известна система управления вооружением танка (RU 2186324 C1, кл. F41G5/24, опубл. 27.07.2002 г.), содержащая прицел-дальномер с кнопкой включения цикла автоматического заряжания пушки, стабилизатор вооружения, танковый баллистический вычислитель, потенциометры ручного ввода поправок на температуру воздуха, изменение начальной скорости снаряда в зависимости от партии зарядов, атмосферное давление, износ канала ствола орудия, температуру заряда и автоматические датчики скорости ветра, крена, скорости танка и курсового угла. Данная система повышает точность стрельбы за счет обеспечения объективного контроля достоверности информации, необходимой для подготовки выстрела и автоматизации процесса выбора и ввода действительных значений измеряемых величин.
Известна компьютерно-телевизионная система управления стрельбой (RU 2226319 C1, кл. H04N5/33, G06F19/00, G06F171/00, опубл. 27.03.2004 г.), содержащая двухканальный телевизионный прицел, лазерный дальномер, баллистический вычислитель, датчик давления, датчик температуры и влажности, датчик силы и направления ветра, датчик угла места цели, датчик точки надира. Данное изобретение качественно повышает точность стрельбы за счет максимального учета влияющих на точность стрельбы факторов.
Указанные системы система не позволяют обеспечивать прием и одновременную обработку двух видеосигналов и решать задачу интерактивного захвата и сопровождения объекта.
Известна интеллектуальная система управления огнем боевой машины (RU 98237 U1, кл. F41G 5/00, опубл. 10.10.2010 г.), содержащая прицел наводчика многоканальный тепловизионный, прицел командира панорамный, датчики, блок управления стабилизатора вооружения, блок управления системы управления дополнительным вооружением, блок управления автомата заряжания, автоматизированные рабочие места наводчика и командира, прицел-дублер телевизионный, видеосистему кругового обзора, блок сопряжения датчиков, блок коммутации видеосигналов, многофункциональный блок управления, два мультиплексных канала информационного обмена.
Известна система управления огнем боевой машины (RU 134624 U1, F41G 5/14, опубл. 20.11.2013 г.), содержащая прицел наводчика многоканальный, прицел командира панорамный, прицел-дублер телевизионный, блок коммутации видеосигналов, блок управления системы управления дистанционной пулеметной установкой, видеосмотровые устройства командира и наводчика и пульты командира и наводчика, датчики, учитывающие положение пушки, положение башни, датчик крена и тангажа, датчик ветра, датчик изгиба ствола пушки, датчик скорости, мультиплексный канал информационного обмена, блок управления автомата заряжания, блок управления стабилизацией вооружения, отличающаяся тем, что дополнительно введены блок цифровой обработки изображений, пульт загрузки, пульт управления системы управления огнем боевой машины и автомата заряжания, аппаратура сопряжения и ввода поправок, группа входов-выходов которой с первого по пятый соединена с группой входов-выходов с первого по пятый прицела наводчика многоканального, причем второй, четвертый и пятый входы-выходы соединены через цифровые каналы информационного обмена RS422, шестой вход-выход аппаратуры сопряжения и ввода поправок соединен с входом-выходом датчика изгиба ствола пушки через цифровой канал информационного обмена RS422, группа входов-выходов с седьмого по девятый соединена соответственно с группой входов-выходов с первого по третий прицела командира панорамного, причем седьмой и восьмой входы-выходы соединены через цифровые каналы информационного обмена RS422, группа входов-выходов с десятого по двенадцатый аппаратуры сопряжения и ввода поправок соединена с группой входов-выходов с первого по третий блока управления системы управления дистанционной пулеметной установкой, причем десятый и одиннадцатый входы-выходы соединены через цифровые каналы информационного обмена RS422, при этом одиннадцатый вход-выход является резервным, четвертый вход-выход блока управления системы управления дистанционной пулеметной установкой образует первый вход-выход системы управления огнем боевой машины для соединения с программно-техническим комплексом объекта через дополнительный цифровой канал информационного обмена CAN, при этом вход блока управления системы управления дистанционной пулеметной установкой соединен с третьим выходом пульта командира, первый и второй выходы которого соединены соответственно с шестым входом аппаратуры сопряжения и ввода поправок и первым входом блока управления автомата заряжания, второй вход которого соединен с пультом загрузки, причем четвертый выход пульта командира является выходом для соединения с блоком управления стабилизацией вооружения, пятый выход пульта командира является выходом для соединения с прицелом-дублером телевизионным, первый выход которого соединен с пятым входом аппаратуры сопряжения и ввода поправок, первые, вторые, третьи и четвертые входы которой соединены соответственно с входом датчика ветра, датчика крена и тангажа, датчика положения башни и датчика положения пушки, второй выход прицела-дублера телевизионного предназначен для соединения с пультом командира и для соединения с пультом управления системы управления огнем боевой машины и автомата заряжания, первый, второй и третий выходы которого служат для соединения со вторым входом блока управления стабилизацией вооружения, для соединения с прицелом-дублером телевизионным и для соединения с блоком управления автомата заряжания соответственно, причем вход-выход блока управления автомата заряжания соединен с тринадцатым входом-выходом аппаратуры сопряжения и ввода поправок, четырнадцатый и пятнадцатый входы-выходы которой образуют соответственно второй вход-выход системы управления огнем боевой машины для соединения с программно-техническим комплексом объекта и третий вход-выход системы управления огнем боевой машины для соединения с программно-техническим комплексом объекта через цифровой канал информационного обмена CAN, причем шестнадцатый вход-выход аппаратуры сопряжения и ввода поправок соединен с первым входом-выходом блока управления стабилизацией вооружения, первый вход которого служит для связи со вторым выходом пульта наводчика, первый выход которого соединен с седьмым входом аппаратуры сопряжения и ввода поправок, первый и второй выходы которой соединены соответственно с входом пульта управления системы управления огнем боевой машины и автомата заряжания и с третьим входом блока управления стабилизацией вооружения, четвертый вход которого служит для связи с датчиком скорости, выход блока управления стабилизацией вооружения предназначен для связи с пультом командира, причем вход-выход блока управления стабилизацией вооружения является четвертым входом-выходом системы управления огнем боевой машины для соединения с программно-техническим комплексом объекта через цифровой канал информационного обмена CAN, вход-выход блока коммутации видеосигналов является пятым входом-выходом системы управления огнем боевой машины, предназначенным для соединения с программно-техническим комплексом объекта через цифровой канал информационного обмена CAN, первый вход-выход блока цифровой обработки изображений является шестым входом-выходом системы управления огнем боевой машины, который служит для соединения с программно-техническим комплексом объекта через цифровой канал информационного обмена CAN, второй вход-выход блока цифровой обработки изображений является седьмым входом-выходом системы управления огнем боевой машины, предназначенным для соединения с программно-техническим комплексом объекта через мультиплексный канал информационного обмена, причем группа входов с первого по четвертый блока цифровой обработки изображений соединена с группой выходов с первого по четвертый блока коммутации видеосигналов, пятый и шестой выходы которого служат для соединения с видеосмотровым устройством командира, девятый и десятый выходы блока коммутации видеосигналов служат для соединения с видеосмотровым устройством наводчика, при этом шестой и девятый выходы блока коммутации видеосигналов являются дополнительными, седьмой и восьмой выходы блока коммутации видеосигналов являются первым и вторым резервными видеовыходами (ВидеоВых.1-рез., ВидеоВых.2-рез.), первый и второй входы блока коммутации видеосигналов соединены соответственно с первым и вторым выходами блока цифровой обработки изображений, третий и четвертый входы блока коммутации видеосигналов предназначены для соединения с прицелом командира панорамным, при этом четвертый вход является резервным, пятый вход блока коммутации видеосигналов служит для соединения с прицелом-дублером телевизионным, седьмой и восьмой входы блока коммутации видеосигналов предназначены для соединения с прицелом наводчика многоканальным тепловизионным, при этом седьмой вход является резервным, шестой вход блока коммутации видеосигналов является резервным видеовходом (ВидеоВх.-рез.), причем прицел наводчика многоканальный тепловизионный имеет дополнительный выход через канал "Видео ПНМ", прицел командира панорамный имеет дополнительный выход через канал "Видео ПКП" и прицел-дублер телевизионный имеет дополнительный выход через канал "Видео ПДТ". Указанная система обеспечивает повышение надежности и расширение функциональных возможностей системы управления огнем боевой машины.
Известна система управления огнем «КАЛИНА» современного танка Т-90МС (https://vpk.name/library/f/kalina-suo.), включающая в свой состав прицел наводчика, панорамный прицел командира, цифровой баллистический вычислитель и комплект датчиков условий стрельбы (скорость ветра, крен).
Известна развитая система управления огнем зенитно-ракетного комплекса «Тунгуска» (https://tvzvezda.ru/weapon/raketi/201112071527-idxt.htm), которая позволяет вести автоматическую стрельбу не только с места, но и с ходу.
Известна система управления огнем зенитно-ракетного комплекса «Панцирь-С1» (https://www.npovk.ru/produktsiya/zenitnye-raketno-pushechnye-kompleksy/pantsir-s1/). «Панцирь-С1» может вести прицельную стрельбу во время движения. Это позволяет машине более эффективно прикрывать колонны техники от авиаударов.
Из доступных источников (http://oruzhie.info/vojska-pvo/414-2s6m-tunguska-m) известно, что сплошная зона поражения цели указанных выше зенитно-ракетных комплексов достигается за счет последовательного обстрела цели с высоким темпом стрельбы из артиллерийской установки калибра 30 мм.
Недостатком всех указанных выше систем является то, что их использование не позволяет добиться точного определения траектории движения высокоскоростной цели при произвольном маневре объекта-носителя и поражение целей при более низком темпе стрельбы.
В задачу изобретения положено создание новой системы управления огнем с возможностью определения траектории движения высокоскоростной цели при произвольном маневре объекта-носителя.
Техническим результатом является повышение точности определения траектории цели и точности наведения орудия на точку встречи снаряда с целью, в том числе и при более низком темпе стрельбы.
Это достигается тем, что система управления огнем боевой машины содержит прицельный комплекс, включающий оптико-электронную систему, выполненную с телевизионным, тепловизионным и дальномерным каналами, телеавтомат сопровождения цели, привод горизонтального наведения прицела и привод вертикального наведения прицела с датчиками углового положения, выполненные с возможностью обмена данными между собой, центральную вычислительную систему, систему управления приводами наведения и стабилизации ствола орудия, включающую блок усиления мощности, привод горизонтального наведения ствола орудия и привод вертикального наведения ствола орудия с датчиками углового положения, выполненные с возможностью обмена данными между собой, комплекс топопривязки и навигации, установленный в башне боевой машины, включающий инерциальную навигационную систему и наземную аппаратуру спутниковой навигационной системы, выполненные с возможностью обмена данными между собой, датчик пройденного пути, при этом прицельный комплекс соединен с центральной вычислительной системой, центральная вычислительная система соединена с системой управления приводами наведения и стабилизации орудия и с комплексом топопривязки и навигации, датчик пройденного пути соединен с инерциальной навигационной системой, в центральной вычислительной системе установлено специальное программное обеспечение с расчетными алгоритмами, позволяющими преобразовывать данные, полученные в локальной системе координат прицела, в Земную топографическую систему координат; телеавтомат сопровождения цели представляет собой программно-аппаратный комплекс, который позволяет определить точное положение цели по полученным от оптико-электронной системы видеоизображению цели от телевизионного, или тепловизионного каналам и угловому положению визирной оси от датчиков углового положения привода горизонтального наведения прицела и привода вертикального наведения прицела; в качестве датчика пройденного пути используется одометрический датчик; прицельный комплекс соединен с центральной вычислительной системой, центральная вычислительная система соединена с системой управления приводами наведения и стабилизации орудия и с комплексом топопривязки и навигации, датчик пройденного пути соединен с инерциальной навигационной системой с помощью кабельного канала информационного обмена.
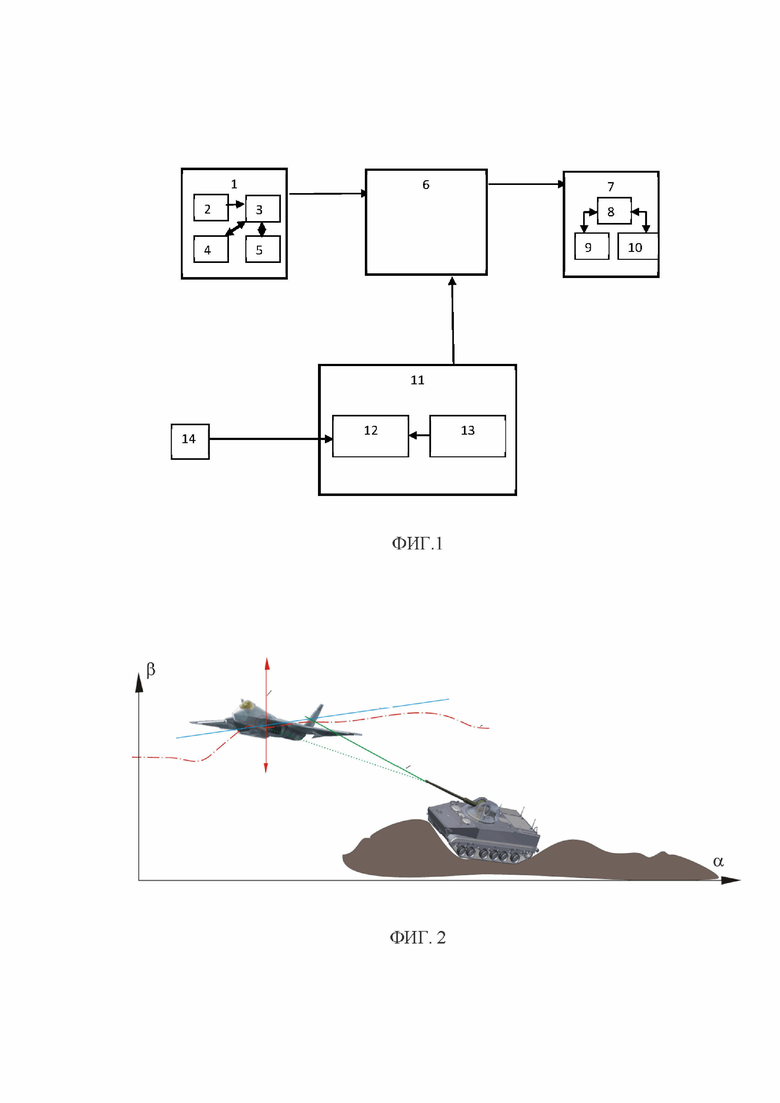
На фиг. 1 представлена функциональная схема системы управления огнем боевой машины.
На фиг. 2 представлен схематический рисунок, демонстрирующий необходимость учета маневра боевой машины на пересеченной местности для точного определения траектории цели, где:
 - кажущаяся поперечная скорость;
- кажущаяся поперечная скорость;
 - траектория полета цели;
- траектория полета цели;
 - ось ствола;
- ось ствола;
 - видимая с ЗАК 57 траектория полета цели.
- видимая с ЗАК 57 траектория полета цели.
Конструктивно система управления огнем боевой машины на фиг. 1 содержит:
1 - прицельный комплекс,
2 - оптико-электронную систему,
3 - телеавтомат сопровождения цели,
4 - привод горизонтального наведения прицела,
5 - привод вертикального наведения прицела,
6 - центральную вычислительную систему,
7 - система управления приводами наведения и стабилизации ствола орудия,
8 - блок усиления мощности,
9 - привод горизонтального наведения ствола орудия,
10 - привод вертикального наведения ствола орудия,
11 - комплекс топопривязки и навигации,
12 - инерциальную навигационную систему,
13 - наземную аппаратуру спутниковой навигационной системы,
14 - датчик пройденного пути.
Прицельный комплекс 1 включает оптико-электронную систему 2 с телеавтоматом сопровождения цели 3, с приводом горизонтального наведения прицела 4 и с приводом вертикального наведения прицела 5, выполненные с возможностью обмена данными между собой, например, по кабельному каналу информационного обмена.
Оптико - электронная система 2 выполнена с телевизионным, тепловизионным и дальномерным каналами, позволяющими обнаруживать цели и определять дальность до них.
Телеавтомат сопровождения цели 3 представляет собой программно-аппаратный комплекс, который позволяет определить точное положение цели по полученным от оптико-электронной системы 2 видеоизображению цели от телевизионного или тепловизионного каналов и угловому положению визирной оси от датчиков углового положения привода горизонтального наведения прицела 4 и привода вертикального наведения прицела 5.
Привод горизонтального наведения прицела 4 и привод вертикального наведения прицела 5 представляют собой электродвигатели с механическими редукторами и с датчиками углового положения.
Прицельный комплекс 1 соединен с центральной вычислительной системой 6, например, с помощью кабельного канала информационного обмена.
Центральная вычислительная система 6 представляет собой вычислительный комплекс с системой отображения информации.
Центральная вычислительная система 6 соединена с системой управления приводами наведения и стабилизации орудия 7 и с комплексом топопривязки и навигации 11, например, с помощью кабельного канала информационного обмена.
Система управления приводами наведения и стабилизации орудия 7 включает блок усиления мощности 8, привод горизонтального наведения орудия 9 и привод вертикального наведения орудия 10, выполненные с возможностью обмена данными между собой, например, по кабельному каналу информационного обмена.
Привод горизонтального наведения орудия 9 и привод вертикального наведения орудия 10 представляют собой электродвигатели с механическими редукторами и с датчиками углового положения.
Комплекс топопривязки и навигации 11 соединен с центральной вычислительной системой 6, например, с помощью кабельного канала информационного обмена.
Комплекс топопривязки и навигации 11 включает инерциальную навигационную систему 12, соединенную с наземной аппаратурой спутниковой навигационной системы 13, выполненные с возможностью обмена данными между собой, например, по кабельному каналу информационного обмена.
Инерциальная навигационная система 12 расположена в башне боевой машины.
Датчик пройденного пути 14 соединен с инерциальной навигационной системой 12, например, с помощью кабельного канала информационного обмена.
В качестве датчика пройденного пути 14, используется, например, одометрический датчик.
Предлагаемая система управления огнем боевой машины работает следующим образом.
Прицельный комплекс 1 обнаруживает цель, определяет дальность до нее, захватывает и сопровождает цель, определяет координаты и скорость цели в локальной системе координат прицела и передает эту информацию в центральную вычислительную систему 6. В телеавтомат сопровождения цели 3 от телевизионного (или тепловизионного) канала оптико-электронной системы 2 поступает информация в виде видеоизображения цели и, по запросу, информация о дальности до цели Д, а также от датчиков углового положения привода горизонтального наведения прицела 4 и привода вертикального наведения прицела 5 - данные об углах поворота αприц и βприц (углах визирной оси прицельного комплекса 1 по данным датчиков углового положения привода горизонтального наведения прицела 4 и привода вертикального наведения прицела 5). Телеавтомат сопровождения цели 3 уточняет углы отклонения цели δα и δβ от положения визирной оси прицельного комплекса 1 по видео и передает:
- в привод горизонтального наведения прицела 4 и в привод вертикального наведения прицела 5 - данные об углах отклонения цели δα и δβ для отработки;
- в центральную вычислительную систему 6 - данные об углах (δα+αприц) и (δβ+βприц), дальности до цели Д, размерах цели (в локальной системе координат прицельного комплекса 1).
Комплекс топопривязки и навигации 11 определяет и передает в центральную вычислительную систему 6 ориентацию (данные о дирекционном угле ψ, тангаже ν и крене γ) и текущие координаты боевой машины в Земной системе координат. Для более точного определения текущих координат боевой машины комплекс топопривязки и навигации 11 использует данные от датчика пройденного пути 14.
Центральная вычислительная система 6 с учетом данных от прицельного комплекса 1 и комплекса топопривязки и навигации 11:
- определяет координаты цели, траекторию, упрежденную точку и скорость цели в Земной системе координат;
- определяет и выдает в систему управления приводами наведения и стабилизации ствола орудия 7 данные об углах наведения ψц, νц и угловую скорость цели Vцx, Vцy, Vцz (с учетом баллистической, метеорологической и др. поправок) для ориентации его в точку встречи снаряда с целью;
- определяет по данным датчика начальной скорости временную поправку взрывателя.
После этого система управления приводами наведения и стабилизации ствола орудия 7 обеспечивает оптимальное наведение на цель ствола орудия приводом горизонтального наведения ствола орудия 9 и приводом вертикального наведения ствола орудия 10 с датчиками углов положения и угловой скорости ствола. Блок усиления мощности 8 в зависимости от положения ствола относительно предполагаемой точки встречи снаряда с целью вырабатывает параметры тока для электродвигателя, необходимые для придания стволу оптимальных угловой скорости и углового ускорения. При попадании ствола орудия в допусковую зону наведения система управления приводами наведения и стабилизации ствола орудия 7 вырабатывает сигнал, разрешающий выстрел.
На марше при произвольном маневре боевой машины полученная по данным прицела «кажущаяся» траектория движения высокоскоростных, в том числе и воздушных целей, значительно отличается от реальной (фиг. 2). Поэтому ее необходимо пересчитать в траекторию движения цели в неподвижной системе координат, носителем которой является комплекс топопривязки и навигации 11, после чего спрогнозировать точку встречи снаряда с целью в текущем режиме и осуществить наведение орудия в эту точку.
В системе управления огнем боевой машины используется специальное программное обеспечение, установленное в центральной вычислительной системе 6, в котором реализованы расчетные алгоритмы, позволяющие преобразовывать данные, полученные в локальной системе координат прицельного комплекса 1, в Земную топографическую систему координат.В связи с этим для построения расчетных алгоритмов вводятся следующие системы координат:
- неподвижная система координат, ось Xн которой горизонтальна и лежит в плоскости меридиана, ось Yн перпендикулярна к линии меридиана (соответствует Земной топографической системе координат с погрешностями, вносимыми комплексом топопривязки и навигации 11);
- система координат инерциальной навигационной системы 12, входящей в состав комплекса топопривязки и навигации 11, расположенного в башне боевой машины;
- система координат башни боевой машины, где ось YБ совпадает с осью вращения башни (перпендикулярна погону башни), а ось XБ продольная, перпендикулярная осям YБ и цапф;
- система координат прицельного комплекса 1, где ось YПК перпендикулярна погону азимутальной части прицельного комплекса 1, ось ZПК параллельна угломестной оси прицельного комплекса 1;
Начало координат неподвижной системы координат ( определяется в точке положения боевой машины на момент начала сопровождения цели. В этой системе координат определяются измеренные координаты цели, траектория полета цели и расчетные координаты точки встречи снаряда с целью.
определяется в точке положения боевой машины на момент начала сопровождения цели. В этой системе координат определяются измеренные координаты цели, траектория полета цели и расчетные координаты точки встречи снаряда с целью.
Для получения вектора визирной оси прицела в неподвижной системе координат ( ) нужно вектор визирной оси прицельного комплекса 1 в локальной систем координат
) нужно вектор визирной оси прицельного комплекса 1 в локальной систем координат  последовательно перевести в систему координат комплекса топопривязки и навигации 11 и, наконец, в неподвижную систему координат, используя матрицы преобразования из системы координат прицельного комплекса 1 в систему координат комплекса топопривязки и навигации 11:
последовательно перевести в систему координат комплекса топопривязки и навигации 11 и, наконец, в неподвижную систему координат, используя матрицы преобразования из системы координат прицельного комплекса 1 в систему координат комплекса топопривязки и навигации 11:
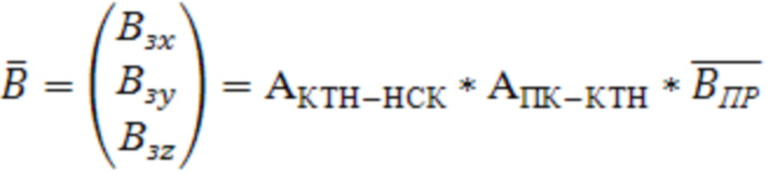
где  - вектор визирной оси прицела в локальной системе координат прицельного комплекса 1;
- вектор визирной оси прицела в локальной системе координат прицельного комплекса 1;
 и
и  - матрицы преобразования из системы координат прицельного комплекса 1 в систему координат комплекса топопривязки и навигации 11 и, дальше, в неподвижную систему координат соответственно;
- матрицы преобразования из системы координат прицельного комплекса 1 в систему координат комплекса топопривязки и навигации 11 и, дальше, в неподвижную систему координат соответственно;
 и
и  - углы визирной оси прицела в системе координат прицельного комплекса 1 по данным датчиков углового положения приводов горизонтального и вертикального наведения прицельного комплекса 1.
- углы визирной оси прицела в системе координат прицельного комплекса 1 по данным датчиков углового положения приводов горизонтального и вертикального наведения прицельного комплекса 1.
Все матрицы преобразования имеют вид:
 ;
;
а аргументы в элементах матриц имеют следующие значения:
для АПК-КТН - ψПР, νПР, γПР (углы Эйлера, полученные при юстировке прицела относительно комплекса топопривязки и навигации 11);
для  - ψКТН, νКТН, γКТН (текущие углы Эйлера, измеренные комплексом топопривязки и навигации 11).
- ψКТН, νКТН, γКТН (текущие углы Эйлера, измеренные комплексом топопривязки и навигации 11).
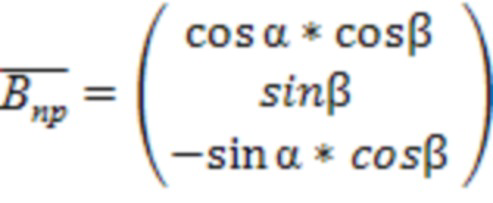
Текущие координаты цели в неподвижной системе координат рассчитываются по формуле:

где  - текущие координаты боевой машины, выдаваемые комплексом топопривязки и навигации 11;
- текущие координаты боевой машины, выдаваемые комплексом топопривязки и навигации 11;
 - координаты боевой машины, выдаваемые комплексом топопривязки и навигации 11 в момент начала слежения за целью;
- координаты боевой машины, выдаваемые комплексом топопривязки и навигации 11 в момент начала слежения за целью;
 - вектор цели в системе координат прицельного комплекса 1;
- вектор цели в системе координат прицельного комплекса 1;
 - текущая дальность до цели;
- текущая дальность до цели;
и - углы визирной оси прицела в системе координат прицельного комплекса 1 по данным датчиков углового положения;
 - смещение системы координат прицела относительно системы координат башни боевой машины.
- смещение системы координат прицела относительно системы координат башни боевой машины.
По полученным после начала слежения тридцати текущим координатам цели методом наименьших квадратов определяется траектория, скорость и ускорение цели, после чего определяются текущие точки встречи снаряда с целью для каждого последующего временного интервала наведения до момента выстрела.
Наличие в системе управления огнем комплекса топопривязки и навигации, в состав которого входит инерциальная навигационная система, наземная аппаратура спутниковой навигационной системы и датчик пройденного пути, позволяет определить координаты боевой машины и пространственное угловое положение башни со стволом пушки и визирной оси прицела в неподвижной системе координат, связанной с Земной топографической системой координат.
Таким образом, предлагаемое изобретение позволяет обеспечить поражение высокоскоростной цели даже при более низком темпе стрельбы за счет повышения точности наведения орудия на точку встречи снаряда с целью.
Ниже представлен пример конкретного осуществления предлагаемой системы управления огнем боевой машины.
Пример 1.
Система управления огнем была реализована в дистанционно управляемом боевом модуле с автоматической пушкой калибра 57 мм (ДУБМ-57).
В прицельном комплексе в качестве оптико-электронной системы использовалась оптико-электронная система обнаружения и прицеливания 7617.00.00.000 (ОАО «Пеленг», Беларусь), в качестве телеавтомата сопровождения цели использовался автомат сопровождения целей ВЕШК.466219.001 (ООО «ВедаПроект»), в качестве привода горизонтального наведения прицела и привода вертикального наведения прицела использовались электродвигатели с механическими редукторами и с датчиками углового положения.
В качестве центральной вычислительной системы использовался блок многофункциональной панели оператора АНЛФ.433815.001 (ЗАО «НПК «Альфа-М») со специальным программным обеспечением, обладающим расчетными алгоритмами, позволяющими преобразовывать данные, полученные в локальной системе координат прицела, в Земную топографическую систему координат.
В системе управления приводами наведения и стабилизации орудия в качестве блока усиления мощности использовался блок усиления мощности, разработанный АО «ЦНИИ» Буревестник», в качестве привода горизонтального наведения орудия и привод вертикального наведения орудия использовались электродвигатели с механическими редукторами и с датчиками углового положения.
В комплексе топопривязки и навигации в качестве инерциальной навигационной системы использовался блок ГЛ-150М (ООО «Гиролаб», г.Пермь), в качестве наземной аппаратуры спутниковой навигационной системы использовалась аппаратура «Бриз КМ-У» (АО «КБ «НАВИС»).
В качестве датчика пройденного пути использовался одометрический датчик.
Расчеты показали, что определенную по данному алгоритму погрешность прогноза координат точки встречи снаряда с целью на дальности до 6000 м не превышают 3,5 м.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ | 2007 |
|
RU2351876C1 |
| Система управления огнем боевой машины | 2020 |
|
RU2743893C1 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ И СТАБИЛИЗАТОР ВООРУЖЕНИЯ | 2007 |
|
RU2360208C2 |
| САМОХОДНОЕ АРТИЛЛЕРИЙСКОЕ ОРУДИЕ | 1995 |
|
RU2108614C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ (ВАРИАНТЫ) И ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2366886C2 |
| КОМПЛЕКС УПРАВЛЕНИЯ ВООРУЖЕНИЕМ ТАНКА | 2002 |
|
RU2226664C2 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ С ЗАКРЫТЫХ ПОЗИЦИЙ ПО НЕНАБЛЮДАЕМОЙ ЦЕЛИ И СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ ДЛЯ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2444693C2 |
| БРОНИРОВАННАЯ БАШНЯ "ТАЙФУН" БОЕВОЙ МАШИНЫ | 2003 |
|
RU2254546C1 |
| БОЕВОЙ МОДУЛЬ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 2024 |
|
RU2839637C1 |
| СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ | 2000 |
|
RU2187060C2 |
Изобретение относится к области вооружения, в частности к системе управления огнем боевой машины, которая может быть использована для поражения быстро перемещающихся целей. Система управления огнем боевой машины содержит прицельный комплекс, включающий оптико-электронную систему, телеавтомат сопровождения цели, привод горизонтального наведения прицела и привод вертикального наведения прицела с датчиками углового положения, выполненные с возможностью обмена данными между собой, центральную вычислительную систему, систему управления приводами наведения и стабилизации ствола орудия, включающую блок усиления мощности, привод горизонтального наведения ствола орудия и привод вертикального наведения ствола орудия с датчиками углового положения, выполненные с возможностью обмена данными между собой, комплекс топопривязки и навигации, установленный в башне боевой машины, включающий инерциальную навигационную систему и наземную аппаратуру спутниковой навигационной системы, выполненные с возможностью обмена данными между собой, датчик пройденного пути. При этом прицельный комплекс соединен с центральной вычислительной системой, центральная вычислительная система соединена с системой управления приводами наведения и стабилизации орудия и с комплексом топопривязки и навигации, датчик пройденного пути соединен с инерциальной навигационной системой, в центральной вычислительной системе установлено специальное программное обеспечение с расчетными алгоритмами, позволяющими преобразовывать данные, полученные в локальной системе координат прицела, в Земную топографическую систему координат. Техническим результатом является повышение точности определения траектории цели и точности наведения орудия на точку встречи снаряда с целью, в том числе при более низком темпе стрельбы. 3 з.п. ф-лы, 2 ил.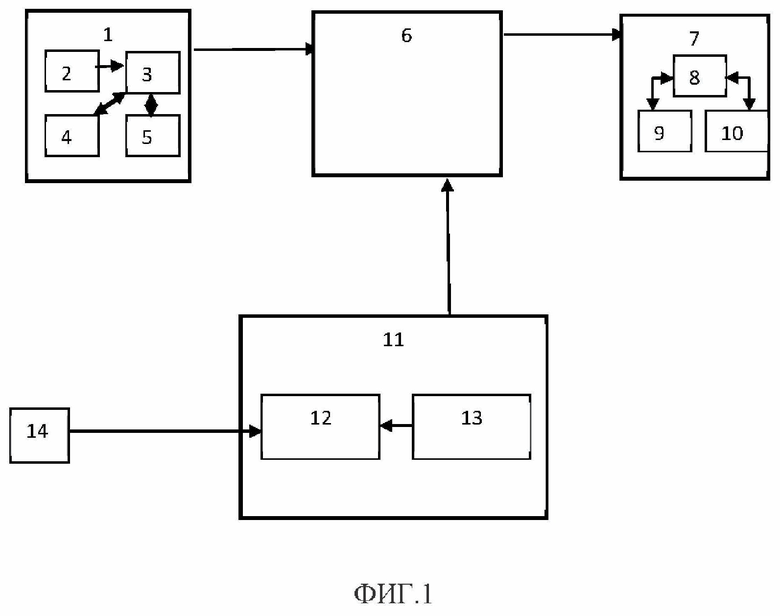
1. Система управления огнем боевой машины содержит прицельный комплекс, включающий оптико-электронную систему, выполненную с телевизионным, тепловизионным и дальномерным каналами, телеавтомат сопровождения цели, привод горизонтального наведения прицела и привод вертикального наведения прицела с датчиками углового положения, выполненные с возможностью обмена данными между собой, центральную вычислительную систему, систему управления приводами наведения и стабилизации ствола орудия, включающую блок усиления мощности, привод горизонтального наведения ствола орудия и привод вертикального наведения ствола орудия с датчиками углового положения, выполненные с возможностью обмена данными между собой, комплекс топопривязки и навигации, установленный в башне боевой машины, включающий инерциальную навигационную систему и наземную аппаратуру спутниковой навигационной системы, выполненные с возможностью обмена данными между собой, датчик пройденного пути, при этом прицельный комплекс соединен с центральной вычислительной системой, центральная вычислительная система соединена с системой управления приводами наведения и стабилизации орудия и с комплексом топопривязки и навигации, датчик пройденного пути соединен с инерциальной навигационной системой, в центральной вычислительной системе установлено специальное программное обеспечение с расчётными алгоритмами, позволяющими преобразовывать данные, полученные в локальной системе координат прицела, в Земную топографическую систему координат.
2. Система по п. 1, отличающаяся тем, что телеавтомат сопровождения цели представляет собой программно-аппаратный комплекс, который позволяет определить точное положение цели по полученным от оптико-электронной системы видеоизображению цели от телевизионного или тепловизионного каналам и угловому положению визирной оси от датчиков углового положения привода горизонтального наведения прицела и привода вертикального наведения прицела.
3. Система по п. 1, отличающаяся тем, что в качестве датчика пройденного пути используется одометрический датчик.
4. Система по п. 1, отличающаяся тем, что прицельный комплекс соединен с центральной вычислительной системой, центральная вычислительная система соединена с системой управления приводами наведения и стабилизации орудия и с комплексом топопривязки и навигации, датчик пройденного пути соединен с инерциальной навигационной системой с помощью кабельного канала информационного обмена.
| ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ УПРАВЛЕНИЯ ОГНЕМ (ВАРИАНТЫ) | 2002 |
|
RU2224206C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО НАВЕДЕНИЯ ОРУЖИЯ НА ПОДВИЖНУЮ ЦЕЛЬ | 2014 |
|
RU2555643C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ ИСТРЕБИТЕЛЯ | 2010 |
|
RU2439461C1 |
| US 20110162250 A1, 07.07.2011 | |||
| US 20160091282 A1, 31.03.2016. | |||

