Изобретение относится к области систем автоматического управления стрельбой из танка.
Существующие способы, применяемые в системах управления огнем (СУО) танков, например СУО 1А42, предусматривают при подготовке стрельбы ввод поправок (углов упреждения) на положение пушки в вертикальной (ВН) и горизонтальной (ГН) плоскостях наведения. Источник [1] поясняет структурную схему и способ ввода поправок. Поправки на дальность до цели, крен танка, боковой ветер, выбранную баллистику, износ канала ствола, температуру окружающей среды, температуру заряда, атмосферное давление определяются или устанавливаются в баллистическом вычислителе, вводятся в каналы управления приводами и изменяют положение пушки относительно линии прицеливания. Поправки на скорость движения цели определяются в прицеле и также вводятся в каналы управления приводами.
Правила стрельбы из танков предусматривают стрельбу с места, с коротких остановок и с хода в основном при фронтальном движении танка с автоматическим вводом поправок.
При необходимости ведения стрельбы с хода в условии флангового или косого перемещения танка относительно цели правила стрельбы предусматривают следующую последовательность действий: наводчик определяет дальность до цели, определяет примерную расчетную или табличную величину бокового упреждения (величину изменения направления ВИНт (движение танка), ВИНц (движение цели), ВИНо (движение танка и цели), которые могут изменяться в пределах от 1,8 тыс. (мрад) до 12 тыс., затем вручную, удерживая прицельную марку с боковым выносом от цели на величину выбранного упреждения, производит выстрел. Время подготовки выстрела значительно увеличивается, эффективность стрельбы снижается, что является существенным недостатком. На практике этот способ стрельбы не применяется, не входит в курс обучения наводчика и не проверяется ни при каких вилах испытаний танков. Стрельба с хода при маневрировании танка на змейке с изменением курсового угла не предусматривается правилами.
Условия современного боя ставят задачу вести эффективную стрельбу при маневрировании танка, уменьшающем вероятность его поражения. Современные СУО не обеспечивают решение такой задачи, что является существенным недостатком.
Изобретение направлено на расширение функциональных возможностей применения оружия, облегчение режима прицеливания и повышение эффективности стрельбы.
Сущность изобретения заключается в том, что вводят в привод ГН статическую поправку на положение пушки в горизонтальной плоскости, пропорциональную сигналам функциональных датчиков крена танка, бокового ветра и скорости перемещения цели, дополнительно измеряют расстояние, пройденное танком, и синусно-косинусным трансформатором определяют синус курсового угла, вычисляют в счетно-решающем приборе величину сигнала управления скоростью наведения прицельной марки в горизонтальной плоскости, пропорциональной поправке, в соответствии с математической зависимостью
где Δβ - поправка;
β - курсовой угол;
L - пройденный танком путь;
D - дальность до цели,
автоматически вводят вычисленный сигнал в виде динамической поправки в танковый прицел, наводят прицельную марку на цель, тем самым удерживая прицельную марку, а вместе с ней и пушку на цели.
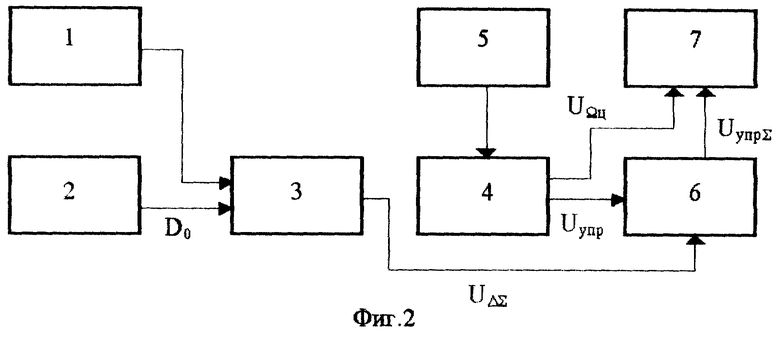
Изобретение поясняется чертежами, где на фиг.1 изображены геометрические построения, поясняющие сущность предлагаемого способа. На фиг. 2 приведена схема способа ввода поправок в современных СУО. На фиг.3 приведена схема предлагаемого способа ввода дополнительной поправки.
Сведения, подтверждающие возможность осуществления изобретения с получением указанного выше технического результата, заключаются в следующем: начальный курсовой угол β (фиг.1) измеряется между направлением движения ОС танка 1 и начальным направлением ОА на цель 2. При перемещении танка из точки О в точку О1 на расстояние L пушка будет иметь направление ОВ параллельное ОА, но смещенное от цели, при этом текущая дальность до цели D, вычисляемая в баллистическом вычислителе как D=D0+ΔD, где D0 - измеренная дальность, ΔD - поправка, изменяется на дальность D1, направление ОА изменится на направление O1A. Курсовой угол CO1A изменится на величину поправки Δβ, измеренной между направлениями O1B и O1A.
На фиг.2 приведена схема способа ввода поправок в современных СУО. В устройстве прототипа на входы баллистического вычислителя 3 (фиг.2) подаются сигналы с функциональных датчиков 1 крена танка, бокового ветра, скорости цели и с лазерного дальномера 2 дальность до цели D0. Наводчик при помощи схемы управления 4 наводит марку прицела 5 на цель, при этом вырабатывается сигнал управления приводом Uупр, который суммируется в сумматоре 6 с сигналом поправок UΔΣ, вырабатываемом в баллистическом вычислителе 3. Суммарный сигнал UупрΣ поступает на привод ГН 7. Если наведение осуществляется по движущейся с боковым перемещением цели, то в прицеле 5 вырабатывается сигнал UωЦ, который также поступает на вход привода ГН 7. Сигналы поправок UΔΣ и UωЦ смещают пушку от линии прицеливания на упрежденный угол пропорциональный сигналам поправок.
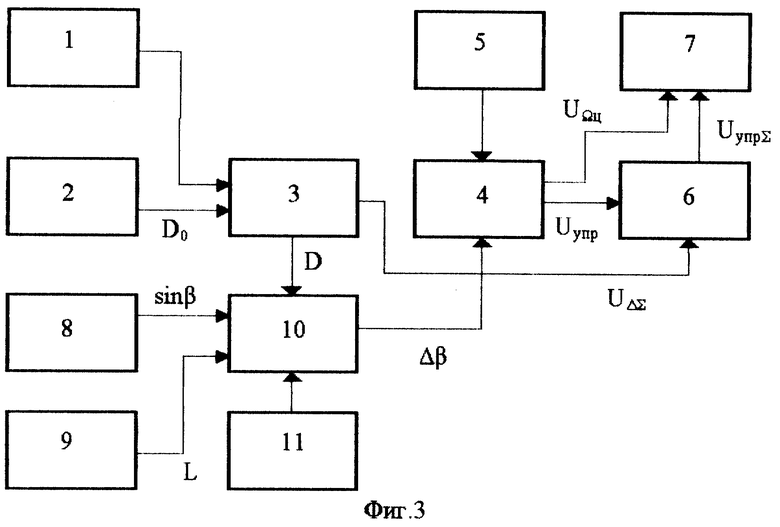
Предложенный способ (фиг.3) характеризуется следующим порядком действий: на входы баллистического вычислителя 3 подаются сигналы с функциональных датчиков 1 крена танка, бокового ветра, скорости цели и с лазерного дальномера 2 дальность до цели D0. Наводчик при помощи схемы управления 4 наводит марку прицела 5 на цель, при этом вырабатывается сигнал управления приводом Uynp, который суммируется в сумматоре 6 с сигналом поправок UΔΣ, вырабатываемом в баллистическом вычислителе 3. Суммарный сигнал UупрΣ поступает на привод ГН 7. Если наведение осуществляется по движущейся с боковым перемещением цели, то в прицеле 5 вырабатывается сигнал UωЦ, который также поступает на вход привода ГН 7. Сигналы поправок UΔΣ и UωЦ смещают пушку от линии прицеливания на упрежденный угол, пропорциональный сигналам поправок. На входы счетно-решающего прибора 10, производящего вычисления в соответствии с формулой (1), подаются сигналы с синусно-косинусного трансформатора 8, определяющего сигнал, пропорциональный sinβ, датчика пути 9, измеряющего расстояние, пройденное танком, выключателя 11, по команде с которого начинается автоматическая работа схемы. Сигнал Δβ со счетно-решающего прибора 10 вводится на вход схемы управления 4, обеспечивая автоматическое слежение прицельной марки, а вместе с ней и пушки, за целью.
В отличии от статической поправки современных СУО в виде углового упреждения, в предлагаемом способе дополнительно вводится динамическая поправка в виде скорости слежения за целью.
Возможность осуществление изобретения с получением вышеуказанного технического результата подтверждается следующим.
Рассмотрим на фиг. 1 треугольник OO1A, где угол, на который требуется довернуть пушку на цель, равен углу при вершине А.
По теореме косинусов
По теореме синусов
В виду того, что D>L и угол Δβ мал, можно принять D1=D и sinΔβ = Δβ.
Тогда
Предлагаемый способ характеризуется следующим порядком действий:
- при совпадении прицельной марки с целью включить режим автоматического ввода поправки, который в дальнейшем осуществляется периодически, с установленным временем такта;
- на каждом такте произвести считывание текущей дальности D, sinβ и запоминание их в счетно-решающем приборе;
- измерить приращение пути L, пройденного танком за время каждого такта и запомнить его в конце такта;
- вычислить угловую поправку на изменение положения прицельной марки, которое через масштабирующий усилитель задается на время такта как постоянное значение скорости наведения прицельной марки.
Рассмотрим на фиг. 2 функциональную схему ввода поправок в современных СУО. Датчики 1 и дальномер 2 вводят в баллистический вычислитель измеренные и установленные значения физических параметров, перечисленных выше. Баллистический вычислитель 3 вырабатывает суммарное значение поправок, которое через сумматор 6 вводится в привод ГН 7. Привод отрабатывает эту поправку, смещает башню с пушкой в упрежденную точку относительно прицельной марки.
Рассмотрим на фиг.1 и фиг.3 функциональную схему ввода поправок при предлагаемом способе, отличающуюся тем, что дополнительно синусно-косинусным трансформатором 8 определяют синус курсового угла β, датчиком пути 9 измеряют пройденный путь L. Значения дальности до цели D, пути L и sinβ вводятся в счетно-решающий прибор 10, который вычисляет поправку и вводит ее в прицел как постоянную скорость наведения прицельной марки, а следовательно, и пушки в сторону цели. Режим ввода поправки начинается и заканчивается по команде с выключателя 11.
Возможность осуществления предлагаемого способа ввода поправки на фланговые перемещения танка подтверждается тем, что дополнительные приборы, необходимые для этой цели, известны.
Вычисление пройденного танком пути производится в существующих баллистических вычислителях при определении поправки на дальность, применение датчика пути типа АЮИЖ.462414.002 или ЮЛ2.781.001, используемых в танковой навигационной аппаратуре, обеспечивает более высокую точность измерений. Прибор с синусно-косинусным трансформатором разработан и вводится в конструкцию перспективного и модернизируемых танков для использования в автоматизированной системе управления танковым подразделением.
Решение задачи в соответствии с формулой (1) можно осуществить в существующих баллистических вычислителях с минимальной доработкой, либо в микропроцессоре, входящем в СУО перспективного танка, либо в отдельном счетно-решающем приборе, либо в схеме управления приводом башни.
Источники информации
1. Теория и конструкция танка, т.2. - М.: Машиностроение, 1982 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА СТАБИЛИЗАЦИИ И НАВЕДЕНИЯ | 2002 |
|
RU2230279C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2172463C2 |
| Система управления огнем боевой машины | 2022 |
|
RU2785804C1 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ (ВАРИАНТЫ) И ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2366886C2 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ВОЗДУШНОЙ ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2002 |
|
RU2218544C2 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ И СТАБИЛИЗАТОР ВООРУЖЕНИЯ | 2007 |
|
RU2360208C2 |
| КОМПЛЕКС ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ | 2007 |
|
RU2351876C1 |
| ТАНК С ЗЕНИТНЫМ ВООРУЖЕНИЕМ | 2002 |
|
RU2231737C1 |
| СПОСОБ СТРЕЛЬБЫ КОМПЛЕКСА ВООРУЖЕНИЯ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ, СПОСОБ ОПРЕДЕЛЕНИЯ ЭКСПЕРИМЕНТАЛЬНОЙ ЗАВИСИМОСТИ УГЛОВОЙ СКОРОСТИ ЛИНИИ ВИЗИРОВАНИЯ | 2012 |
|
RU2529241C2 |
| СПОСОБ СТРЕЛЬБЫ БОЕВОЙ МАШИНЫ ПО ЦЕЛИ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2243483C1 |
Изобретение относится к области военной техники. Технический результат - расширение функциональных возможностей применения оружия, облегчение режима прицеливания и повышение эффективности стрельбы. Способ обеспечения прицельной стрельбы при фланговых перемещениях танка заключается в том, что вводят в привод горизонтального наведения статическую поправку на положение пушки в горизонтальной плоскости, пропорциональную сигналам функциональных датчиков крена танка, бокового ветра и скорости перемещения цели. Дополнительно измеряют расстояние, пройденное танком, и синусно-косинусным трансформатором определяют синус курсового угла, вычисляют в счетно-решающем приборе величину сигнала управления скоростью наведения прицельной марки в горизонтальной плоскости, пропорциональной поправке, в соответствии с математической зависимостью  где Δβ - поправка; β - курсовой угол; L - пройденный танком путь; D - дальность до цели, автоматически вводят вычисленный сигнал в виде динамической поправки в танковый прицел, наводят прицельную марку на цель, тем самым удерживая прицельную марку, а вместе с ней и пушку на цели. 1 з.п. ф-лы, 3 ил.
где Δβ - поправка; β - курсовой угол; L - пройденный танком путь; D - дальность до цели, автоматически вводят вычисленный сигнал в виде динамической поправки в танковый прицел, наводят прицельную марку на цель, тем самым удерживая прицельную марку, а вместе с ней и пушку на цели. 1 з.п. ф-лы, 3 ил.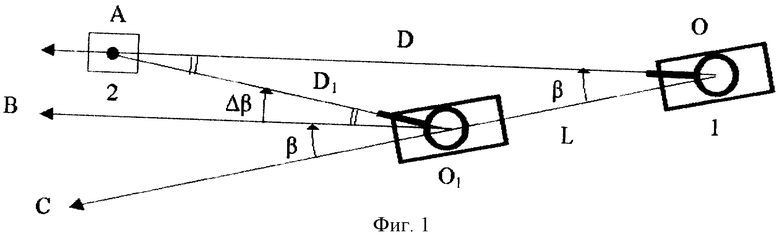

где Δβ - поправка;
β - курсовой угол;
L - пройденный танком путь;
D - дальность до цели,
автоматически вводят вычисленный сигнал в виде динамической поправки в танковый прицел, наводят прицельную марку на цель, тем самым удерживая прицельную марку, а вместе с ней и пушку на цели.
| Теория и конструкция танка | |||
| / Под ред | |||
| П.П.Исакова | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Основы проектирования вооружения танка | |||
| - М.: Машиностроение, 1982, с.133-135 | |||
| RU 94009649 A1, 27.04.1996 | |||
| DE 1913406, 10.05.1973 | |||
| US 4172409, 30.10.1979 | |||
| АЛМАЗНЫЙ ИНСТРУМЕНТ ДЛЯ ПРАВКИ ШЛИФОВАЛЬНЫХ КРУГОВ | 2007 |
|
RU2354532C1 |
