Изобретение относится к системам управления ракет, предназначенных для поражения целей, летящих на предельно малых высотах.
При отсутствии учета влияния подстилающей поверхности в системе управления часть ракет может не поразить цели из-за преждевременного падения ракет на землю или срабатывания радиовзрывателя по сигналам, отраженным от подстилающей поверхности. Это связано с тем, что минимальная высота полета целей соизмерима с величиной реализуемого при наведении промаха. Для повышения вероятности поражения таких целей необходимо смещать математическое ожидание промаха mh вверх на величину, соответствующую величине ожидаемого промаха в вертикальной плоскости.
Известен метод наведения (Применение метода наведения с заданным пролетом для управления ракетой, оснащенной БЧ направленного действия. - Новости зарубежной науки и техники, №21, НИЦ, 1982), при котором реализация заданного смещения сводится к добавлению в команду управления дополнительного сигнала Δλ вида:
где l см - желаемое смещение промаха;
D - дальность между ракетой и целью;
Vсбл - скорость сближения ракеты с целью;
Kн - навигационный коэффициент.
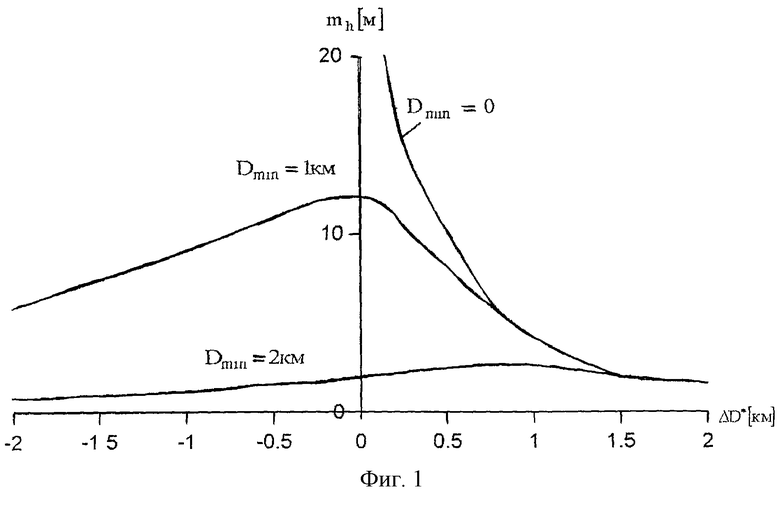
В этом случае имеется существенная зависимость математического ожидания вертикальной составляющей промаха mh от точности и помехозащищенности дальномерных устройств, входящих в систему управления. На фиг.1 представлена зависимость mh от ошибок определения дальности AD* при различных ограничениях дальности Dmin. Отсюда видно, что способ практически неработоспособен при ошибках по дальности более 1-2 км. По этим причинам становится проблематичным использование этого способа при наличии помех дальномерным устройствам ракетной системы или при отсутствии на борту ракеты информации о дальности.
Известен способ управления ракетой, наводящейся на низколетящие цели (Ракета 9М38М1. Техническое описание. 9М38М1.0000.000 TO-1. - Москва: издательство “Лимбус Пресс”, АООТ “Тип.“Правда”, 1999, с.69), при котором дополнительную команду управления, обеспечивающую смещение математического ожидания промаха вверх, формируют по сигналам активного импульсного радиовзрывателя (РВ) о дальности до подстилающей поверхности в направлении главного максимума диаграммы направленности антенн РВ. При этом РВ выдает две метки дальности D1 и D2 (D2<D1) в моменты времени t1 и t2. По интервалу времени между метками τ=t1-t2, характеризующему скорость сближения с подстилающей поверхностью, определяется величина дополнительной команды Δλ(τ), которая выдается в автопилот (АП) в момент времени t2. Зависимость Δλ(τ) выбирается для конкретной ракеты с учетом ее летно-баллистических и динамических характеристик.
При использовании этого способа отпадает необходимость в использовании информации о дальности между ракетой и целью и скорости сближения.
Однако указанный способ, принятый в качестве прототипа, обладает следующими основными недостатками.
1. Измерение активным импульсным РВ интервала времени τ между моментами формирования меток дальности D1 и D2 для измерения скорости сближения с подстилающей поверхностью эквивалентно вычислению скорости как производной по времени от расстояния при малой величине ΔD=D1-D2. Иногда это (изрезанный рельеф, специфические условия отражения радиолокационных сигналов от подстилающей поверхности) приводит к искажению информации о скорости сближения с подстилающей поверхностью.
2. Точность измерений существенно зависит от помеховой обстановки для радиовзрывателя.
3. Надежность и стабильность работы системы может существенно снижаться для подстилающей поверхности, имеющей малую ЭПР.
Целью настоящего изобретения является устранение указанных недостатков и повышение вероятности поражения целей, летящих на предельно малых высотах.
Поставленная цель достигается тем, что дополнительную команду управления ракетой для смещения математического ожидания промаха вверх формируют по информации о скорости сближения с поверхностью, вырабатываемой инерциальной системой управления (ИСУ), в момент появления метки дальности D2 до подстилающей поверхности с активного импульсного радиовзрывателя.
Дальность D2 выбирается исходя из минимально допустимого времени выдачи дополнительной команды управления Δλ до подрыва боевой части, чтобы обеспечить необходимую величину смещения промаха.
На фиг.2 изображена структурная схема формирования команд управления, представляющая собой пример реализации предлагаемого способа.
Сущность управления ракетой, наводящейся на низколетящие цели, по предлагаемому способу заключается в следующем.
Для повышения вероятности поражения целей, летящих на предельно малых высотах, необходимо смещать математическое ожидание промаха вверх на величину, соответствующую величине ожидаемого промаха в вертикальной плоскости. Для этого формируется дополнительная команда управления с использованием информации о дальности до подстилающей поверхности с активного импульсного радиовзрывателя и о скорости сближения с подстилающей поверхностью, вырабатываемой инерциальной системой управления.
По мере снижения ракеты (Р) к поверхности на дальности D2 до подстилающей поверхности в направлении главного максимума диаграммы направленности антенной системы активного импульсного РВ с блока смещения промаха (БСП) подается на вход системы стабилизации, реализованной в ИСУ, через сумматор (С) дополнительная команда управления, формируемая в соответствии с информацией о скорости сближения с подстилающей поверхностью, вырабатываемой ИСУ, обеспечивая смещение промаха вверх в момент подрыва боевой части.
Величина дальности D2 выбирается исходя из минимально допустимого времени выдачи дополнительной команды управления до подрыва боевой части, чтобы обеспечить необходимую величину смещения промаха.
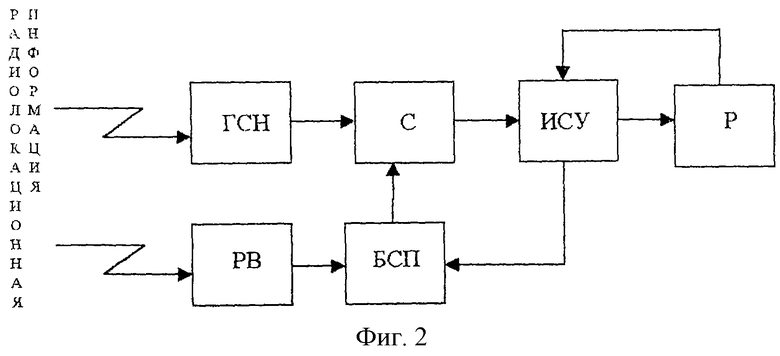
Зависимость величины дополнительной команды управления Δλ, отнесенной к максимальной команде управления λmax, от скорости сближения с подстилающей поверхностью  , отнесенной к максимальной скорости сближения
, отнесенной к максимальной скорости сближения  , для конкретной управляемой ракеты, полученная по результатам математического моделирования, приведена на фиг.3.
, для конкретной управляемой ракеты, полученная по результатам математического моделирования, приведена на фиг.3.
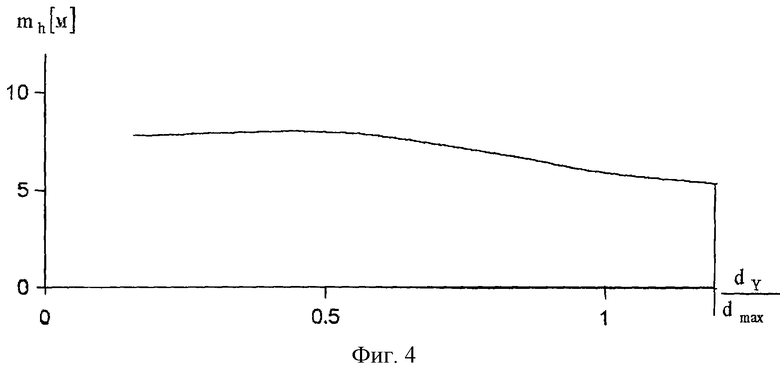
На фиг.4 приведена зависимость математического ожидания вертикальной составляющей промаха mh от относительной дальности до точки встречи (dy/dmax) при наведении на цель, летящую на высоте 15 м. Величина mh составляет 5-7 м во всей зоне применения, что обеспечивает заданную вероятность поражения.
Данный способ позволяет скомплексировать положительные свойства уже существующих ИСУ и РВ:
- ИСУ достаточно точно измеряет скорость изменения высоты полета ракеты  , то есть скорость сближения ракеты с подстилающей поверхностью
, то есть скорость сближения ракеты с подстилающей поверхностью  , но грубо высоту полета ракеты (σY=40-100 м) и не учитывает рельефа местности;
, но грубо высоту полета ракеты (σY=40-100 м) и не учитывает рельефа местности;
- РВ достаточно точно измеряет дальность до подстилающей поверхности (σD=4-6 м при D≤100 м), но грубо скорость сближения с поверхностью 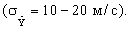 Ошибки определения меток дальности D1 и D2 в прототипе могут приводить в некоторых случаях к увеличению СКО промаха в вертикальной плоскости в 1,5-2 раза, что, в свою очередь, ведет к снижению вероятности поражения целей. При использовании предлагаемого способа СКО может увеличиваться не более чем на 20-25%. Кроме того, использование только одной метки меньшей дальности D2 вместо двух позволяет увеличить сигнал от подстилающей поверхности на 5-6 дБ при том же потенциале РВ, что позволяет повысить помехозащищенность системы, надежность и стабильность ее работы по сравнению с прототипом.
Ошибки определения меток дальности D1 и D2 в прототипе могут приводить в некоторых случаях к увеличению СКО промаха в вертикальной плоскости в 1,5-2 раза, что, в свою очередь, ведет к снижению вероятности поражения целей. При использовании предлагаемого способа СКО может увеличиваться не более чем на 20-25%. Кроме того, использование только одной метки меньшей дальности D2 вместо двух позволяет увеличить сигнал от подстилающей поверхности на 5-6 дБ при том же потенциале РВ, что позволяет повысить помехозащищенность системы, надежность и стабильность ее работы по сравнению с прототипом.
Применение предлагаемого способа позволяет повысить вероятность поражения целей на 0,05-0,1.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС ПРОТИВОВОЗДУШНОЙ РАКЕТНО-КОСМИЧЕСКОЙ ОБОРОНЫ | 2002 |
|
RU2227892C1 |
| ПРОТИВОКОРАБЕЛЬНАЯ РАКЕТА | 2011 |
|
RU2477832C2 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2332634C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2351889C2 |
| РАДИОВЗРЫВАТЕЛЬ ЗАЛПОВОГО ПОДРЫВА БОЕПРИПАСОВ ЗАМЕДЛЕННОГО ДЕЙСТВИЯ С ОПТИКО-ЭЛЕКТРОННЫМ УСТРОЙСТВОМ ПОДТВЕРЖДЕНИЯ НАЛИЧИЯ ЦЕЛИ "АККОРД-2К" | 2001 |
|
RU2216709C2 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2253825C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2292523C2 |
| Способ поражения воздушной цели управляемой ракетой | 2019 |
|
RU2707637C1 |
| Способ поражения цели управляемой ракетой | 2019 |
|
RU2730277C1 |
| ОСКОЛОЧНО-ФУГАСНАЯ БОЕВАЯ ЧАСТЬ НАПРАВЛЕННО-КРУГОВОГО ДЕЙСТВИЯ | 2006 |
|
RU2301958C1 |
Изобретение относится к способам управления ракетами, предназначенными для поражения низколетящих целей. Сущность изобретения заключается в том, что формируют дополнительную команду управления для смещения математического ожидания промаха вверх с использованием информации о дальности до подстилающей поверхности с активного импульсного радиовзрывателя. Дополнительную команду формируют по информации о скорости сближения с поверхностью, вырабатываемой инерциальной системой управления, в момент появления метки о дальности до подстилающей поверхности, которая выбирается исходя из минимально допустимого времени выдачи дополнительной команды управления до подрыва боевой части. Реализация изобретения позволяет повысить помехозащищенность системы наведения, надежность и стабильность ее работы. 4 ил.
Способ управления ракетой, наводящейся на низколетящие цели, при котором формируют дополнительную команду управления для смещения математического ожидания промаха вверх с использованием информации о дальности до подстилающей поверхности с активного импульсного радиовзрывателя, отличающийся тем, что дополнительную команду управления ракетой формируют по информации о скорости сближения с поверхностью, вырабатываемой инерциальной системой управления, в момент появления метки о дальности до подстилающей поверхности, которая выбирается исходя из минимально допустимого времени выдачи дополнительной команды управления до подрыва боевой части.
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Техническое описание | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| - М.: Лимбус Пресс, 1999, с.69 | |||
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЫСОКОМАНЕВРЕННОЙ РАКЕТОЙ | 1998 |
|
RU2146353C1 |
| СПОСОБ ВВОДА ИНФОРМАЦИИ О ДАЛЬНОСТИ ДО ЦЕЛИ В БАЛЛИСТИЧЕСКИЙ ВЫЧИСЛИТЕЛЬ СИСТЕМЫ УПРАВЛЕНИЯ СНАРЯДАМИ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2178141C2 |
| УСТРОЙСТВО ДЛЯ УБОРКИ ПЛОДОВ | 2004 |
|
RU2251834C1 |
| US 4291849, 29.09.1981. | |||
