Предлагаемое изобретение относится к способам и системам индикации целей и может использоваться на различных типах самолетов и вертолетов в составе прицельно-навигационных комплексов и систем.
Известен способ визуальной индикации авиационного прицельного комплекса, заключающийся в отображении на телевизионном индикаторе радиолокационного изображения места нахождения целей (РЛС-изображения), отметок целей, а также символьной информации в реальном времени (меток дальности, маркера и текущего времени). Информацию, отображаемую на индикаторе, регистрируют фотоконтрольным устройством.
Известна также система для осуществления упомянутого способа, содержащая последовательно соединенные формирователь символьной информации, видеосмеситель и индикатор, при этом второй вход видеосмесителя связан с видеовыходом радиолокатора, а вход формирователя символьной информации связан с выходом навигационной системы (“Орион-А”, Техническое описание, ч. 1, АВ 1. 000. 021 ТО, 1977 г.).
Основным недостатком способа визуальной индикации и системы для его осуществления является низкая информативность изображения, отображаемого на индикаторе из-за отсутствия на его экране изображения карты местности в районе РЛС-изображения, что затрудняет оценку взаимного положения самолета или вертолета и целей и объектов на земной или водной поверхности для выполнения маневра или решения задач навигации.
Наиболее близким по технической сущности к предлагаемому изобретению является способ визуальной индикации корабельного прицельного комплекса, заключающийся в одновременном совмещенном отображении на телевизионном индикаторе РЛС-изображения места нахождения цели, изображения карты местности в районе РЛС-изображения и меток времени. При этом совмещение изображений осуществляют путем перемещения центра радиолокационной развертки относительно неподвижного изображения карты. Изображение, отображаемое на телевизионном индикаторе, регистрируют видеомагнитофоном.
Известна также система, осуществляющая упомянутый способ, содержащая последовательно соединенные блок телевизионной камеры с картой местности района РЛС изображения, выполненной на бумажной основе, первое устройство масштабирования, видеосмеситель и телевизионный индикатор, последовательно соединенные преобразователь развертки и второе устройство масштабирования, выход которого связан со вторым входом видеосмесителя, видеомодуль символьной информации, выход которого связан с третьим входом видеосмесителя, и видеомагнитофон, причем первый и второй входы преобразователя развертки связаны соответственно с выходом радиолокатора и выходом навигационной системы (патент США №4081802, МПК 2 G 01 S 7/24, 1978 г.).
Рассматриваемые способ и система визуальной индикации имеют низкие эксплуатационные характеристики, что обусловлено необходимостью ручного выбора карты участка подстилающей поверхности в районе РЛС-изображения для его отображения на телевизионном индикаторе.
Другим недостатком способа и системы является низкое качество РЛС-изображения, предъявляемого оператору из-за возможного наличия мелких помех.
Цель заявляемого изобретения - улучшение эксплуатационных характеристик способа и системы, реализующей способ, повышение достоверности распознавания цели путем повышения качества радиолокационного изображения, отображаемого на индикаторе, и использования цифровой электронной карты.
Поставленная цель достигается тем, что в способе, основанном на совмещенном отображении на телевизионном индикаторе радиолокационного изображения места нахождения цели (РЛС-изображения) и изображения карты местности в районе РЛС-изображения, РЛС-изображение перемещают на телевизионном индикаторе, согласовывая перемещение с изменением положения самолета в пространстве, выводят на телевизионный индикатор карту участка подстилающей поверхности в районе РЛС-изображения, согласованную с режимом работы локатора и с координатами текущего местоположения самолета, определенными навигационной системой. Совмещенное отображение перемещают с учетом компонентов путевой скорости летательного аппарата, разворачивают с учетом курса и прицельного азимута, регулируют баланс РЛС-изображения и изображения карты, при этом в качестве карты используют цифровую электронную карту, подготовленную перед полетом в наземных условиях.
Для обработки РЛС-изображения используют матричный видеопроцессор, при подготовке карты на нее наносят текстовые названия географических объектов и целей, их координаты, а для программируемых целей на карту наносят условные обозначения цели.
Поставленная цель достигается также тем, что система визуальной индикации авиационного прицельного комплекса, осуществляющая упомянутый способ, включающая радиолокатор, навигационную систему, последовательно соединенные видеомодуль символьной информации, видеосмеситель и телевизионный индикатор, снабжена последовательно соединенными аналого-цифровым преобразователем, видеопроцессором и цифроаналоговым преобразователем, а также микроЭВМ, блоком памяти, блоком сопряжения, видеомодулем цифровой электронной карты, преобразователем телевизионного сигнала и модулем контрольных данных, при этом выход цифроаналогового преобразователя связан со вторым входом видеосмесителя, а микроЭВМ, блок памяти, видеомодуль цифровой электронной карты, преобразователь телевизионного сигнала и модуль контрольных данных связаны двусторонней связью с первым, вторым, третьим, четвертым и пятым портами блока сопряжения соответственно, второй порт видеомодуля символьной информации связан двусторонней связью с шестым портом блока сопряжения, выход видеомодуля цифровой электронной карты связан с третьим входом видеосмесителя, выход которого связан также со входом преобразователя телевизионного сигнала, порт управления телевизионного индикатора связан с четвертым входом видеосмесителя, вторым входом видеопроцессора и седьмым портом блока сопряжения, видеовыход радиолокатора связан со входом аналого-цифрового преобразователя, а восьмой, девятый и десятый порты блока сопряжения связаны двусторонней связью с навигационной системой, вторым портом радиолокатора и третьим входом видеопроцессора соответственно.
При этом блок памяти системы выполнен на микросхемах флеш-памяти, содержащих данные цифровой электронной карты, контрольные данные, служебные данные и данные, отображаемые на телевизионном индикаторе.
Отличительными от наиболее близкого аналога признаками являются:
- РЛС-изображение перемещают на телевизионном индикаторе, согласовывая перемещение с изменением положения самолета в пространстве;
- выводят на телевизионный индикатор карту участка подстилающей поверхности в районе РЛС-изображения, согласованную с режимом работы локатора, с координатами текущего местоположения самолета, определенными навигационной системой;
- совмещенное отображение перемещают с учетом компонентов путевой скорости летательного аппарата, разворачивают с учетом курса и прицельного азимута;
- регулируют баланс РЛС-изображения и изображения карты;
- для обработки РЛС-изображения используют матричный видеопроцессор;
- используют цифровую электронную карту, подготовленную перед полетом в наземных условиях;
- при подготовке карты на нее наносят текстовые названия географических объектов и целей, их координаты, а для программируемых целей на карту наносят условные обозначения цели;
- снабжение последовательно соединенными аналого-цифровым преобразователем, видеопроцессором и цифроаналоговым преобразователем;
- снабжение микроЭВМ, блоком памяти, блоком сопряжения, видеомодулем цифровой электронной карты, преобразователем телевизионного сигнала и модулем контрольных данных;
- связь выхода цифроаналогового преобразователя со вторым входом видеосмесителя;
- двусторонняя связь микроЭВМ, блока памяти, видеомодуля цифровой электронной карты, преобразователя телевизионного сигнала, модуля контрольных данных с первым, вторым, третьим, четвертым и пятым портами блока сопряжения соответственно;
- двусторонняя связь второго порта видеомодуля символьной информации с шестым портом блока сопряжения;
- связь выхода видеомодуля цифровой электронной карты с третьим входом видеосмесителя;
- связь выхода видеосмесителя со входом преобразователя телевизионного сигнала;
- связь порта управления телевизионного индикатора с четвертым входом видеосмесителя, вторым входом видеопроцессора и седьмым портом блока сопряжения;
- связь видеовыхода радиолокатора со входом аналого-цифрового преобразователя;
- двусторонняя связь восьмого, девятого и десятого портов блока сопряжения с навигационной системой, вторым портом радиолокатора и третьим входом видеопроцессора соответственно;
- выполнение блока памяти на микросхемах флеш-памяти.
Предлагаемое изобретение обладает следующими преимуществами по сравнению с ближайшим аналогом.
Совмещение на телевизионном индикаторе РЛС-изображения места нахождения цели с учетом изменения положения самолета в пространстве и цифровой электронной карты местности в районе РЛС-изображения с учетом режима работы локатора и с учетом координат текущего местоположения самолета, перемещение совмещенного отображения с учетом компонентов путевой скорости летательного аппарата, с учетом курса и прицельного азимута позволило повысить достоверность распознавания целей. Прошедшие в летно-испытательном центре (г.Ахтубинск, Астраханской обл.) Государственные испытания показали повышение точностных характеристик в 3,2 раза; в 3 раза повысилась надежность работы прицельно-навигационного комплекса, в состав которого входит предлагаемое изобретение (“Аэрокосмические новости”, №32 (237), 01-07 августа 2001 г.)
Включение в состав системы микроЭВМ, видеомодуля цифровой электронной карты, а также блока памяти с файлом цифровой электронной карты района полета обеспечивает автоматическую смену отображаемых на телевизионном индикторе участков навигационной карты, автоматическое перемасштабирование навигационной карты в зависимости от режимов работы радиолокатора, а также представление оператору карты в более удобном виде за счет обеспечения автоматического горизонтирования надписей на карте и автоматического исключения из навигационной карты данных по малоразмерным объектам.
Запись телевизионного изображения на блок памяти, выполненный на микросхемах флеш-памяти, позволяет повысить качество и надежность записи, а также сократить трудозатраты при его обработке после полета.
Выполнение блока памяти на микросхемах флеш-памяти, содержащих данные цифровой электронной карты, контрольные данные, служебные данные и данные, отображаемые на телевизионном индикаторе, уменьшает габариты и массу системы.
Наличие в составе системы модуля контрольных данных с файлом контрольных данных в составе блока памяти позволяет обеспечить контроль системы практически в полном объеме, что существенно повышает показатели контролепригодности системы визуальной индикации.
Обработка радиолокационного изображения видеопроцессором позволяет улучшить качество изображения, предъявляемого оператору, за счет устранения мелких помех на экране телевизионного индикатора.
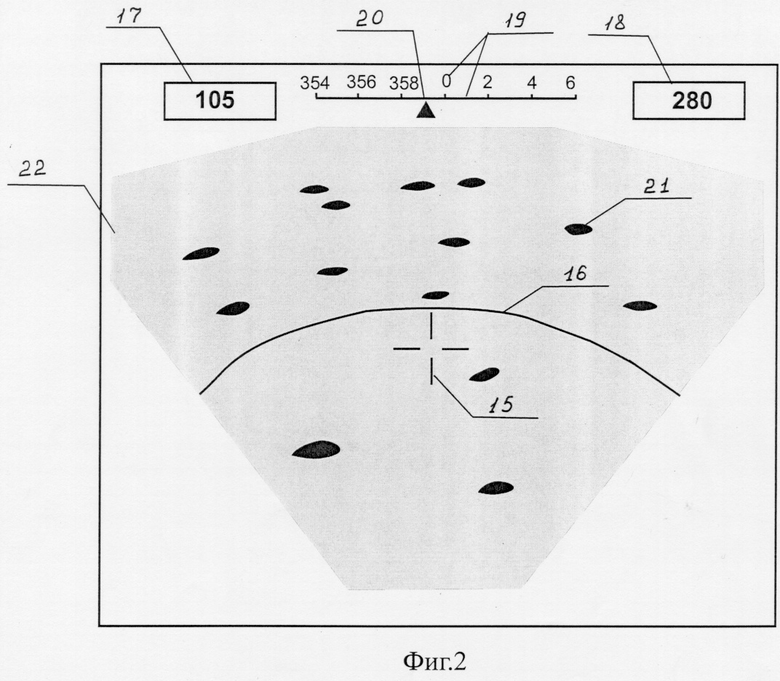
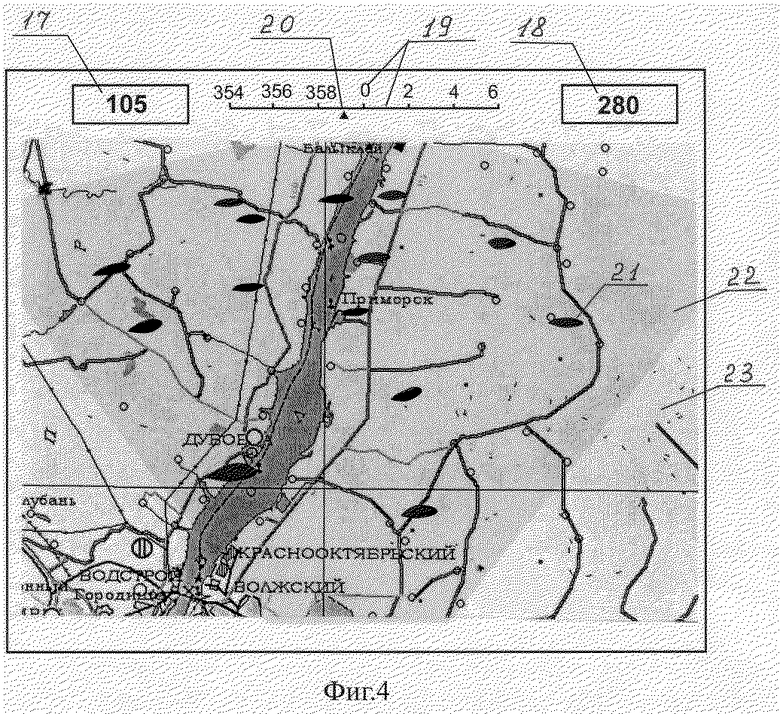
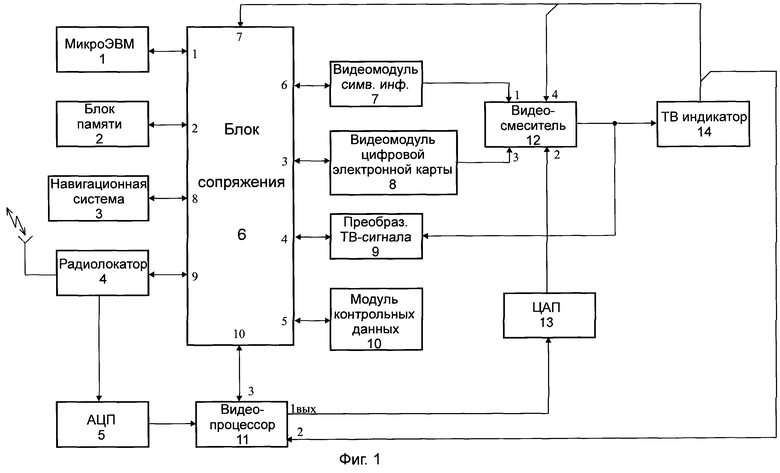
Реализация способа повышения достоверности распознавания цели и системы для его осуществления поясняется фиг. 1-4. На фиг.1 представлена структурная схема заявляемой системы. На фиг.2 - индикация радиолокационного изображения на экране телевизионного индикатора. На фиг.3 - индикация цифровой электронной карты на экране телевизионного индикатора. На фиг.4 - совмещенное изображение радиолокационной обстановки и цифровой электронной карты на экране телевизионного индикатора.
Предлагаемое изобретение реализуется следующим образом. Район нахождения цели и цель изучают, в результате чего получают сведения
1) о точном расположении целей;
2) о дальности и характере видимости целей;
3) о системе ориентиров, обеспечивающих выход на цель.
Выбирают район полета, в наземных условиях подготавливают карту района, наносят на нее обозначения целей в соответствии с их геодезическими координатами ψ, λ, определяют тип цели ВЦ, РЦ, ВРЦ (визуальная, радиолокационная, визуально-радиолокационная). Для программируемых целей на карту наносят условные обозначения цели. В качестве карты используют цифровую электронную карту.
Обнаруживают и опознают цель, для чего используют совмещенное отображение на телевизионном индикаторе радиолокационного изображения места нахождения цели (РЛС-изображения) и изображения участка карты местности (подстилающей поверхности) в районе РЛС-изображения, где находится цель. Для этого штурман вращением соответствующей рукоятки добивается на экране удобной для наблюдения совмещенной индикации РЛС-изображения и электронной карты района, где находится цель (выбирает баланс изображений в зависимости от их интенсивности) (фиг.4).
Для предотвращения перемещения РЛС-изображения при изменении положения самолета по углам крена и тангажа, устранения влияния рысканья самолета по курсу на наблюдаемость целей в радиолокатор от навигационной системы 3 через блок сопряжения 6 подают сигналы крена γ, тангажа ν и курсовой стабилизации ψст.
На телевизионный индикатор выводят цифровую электронную карту, согласованную с координатами текущего местоположения самолета, определенными навигационной системой, т.е. видеомодуль цифровой электронной карты 8, блок памяти 2, микроЭВМ 1, с учетом данных навигационной системы 3 обеспечивают автоматическую смену отображаемых на телевизионном индикаторе участков карты, автоматическое перемасштабирование карты в зависимости от режимов работы радиолокатора 4, а также представляют оператору карту в удобном для работы виде за счет обеспечения автоматического горизонтирования надписей на карте и автоматического исключения из карты данных по малоразмерным объектам.
Совмещенное изображение перемещают с учетом компонентов путевой скорости летательного аппарата, разворачивают с учетом курса и прицельного азимута.
Выбрав удобный для работы баланс изображений, штурман сравнивает положение отметки от цели 21 (фиг.2), полученной в составе РЛС-изображения, обработанного матричным видеопроцессором 11, и условное изображение цели на цифровой электронной карте и принимает решение о нанесении удара.
Система визуальной индикации авиационного прицельного комплекса, реализующая упомянутый способ, состоит из микроЭВМ 1, блока памяти 2, навигационной системы 3, радиолокатора 4, аналого-цифрового преобразователя 5, блока сопряжения 6, видеомодуля символьной информации 7, видеомодуля цифровой электронной карты 8, преобразователя телевизионного сигнала 9, модуля контрольных данных 10, видеопроцессора 11, видеосмесителя 12, цифроаналогового преобразователя 13 и телевизионного индикатора 14.
Выход видеомодуля символьной информации 7 через последовательно соединенный видеосмеситель 12 связан со входом телевизионного индикатора 14. Видеовыход радиолокатора 4 через последовательно соединенные аналого-цифровой преобразователь 5, видеопроцессор 11, цифроаналоговый преобразователь 13 связан со вторым входом видеосмесителя 12, третий вход которого связан с выходом видеомодуля цифровой электронной карты 8. Порт управления телевизионного индикатора 14 связан с четвертым входом видеосмесителя 12, вторым входом видеопроцессора 11 и седьмым портом блока сопряжения 6. Выход видеосмесителя 12 связан также со входом преобразователя телевизионного сигнала 9. Первый, второй, третий, четвертый, пятый, шестой, восьмой, девятый и десятый порты блока сопряжения 6 связаны двусторонней связью с портами микроЭВМ 1, блока памяти 2, видеомодуля цифровой электронной карты 8, преобразователя телевизионного сигнала 9, модуля контрольных данных 10, видеомодуля символьной информации 7, навигационной системы 3, радиолокатора 4 и третьим входом видеопроцессора 11 соответственно.
Система визуальной индикации функционирует следующим образом.
Перед полетом в блок памяти 2 с помощью наземной автоматизированной системы подготовки полетных данных, например АСППД-24, реализованной на базе отечественной универсальной Геоинформационной системы “Карта 2000”, вводятся данные цифровой электронной карты, включающие файлы, описывающие гидрографию, дорожную сеть, населенные пункты, промышленные и социальные объекты, надписи, а также заданный маршрут полета, разрешенные зоны полетов, файл служебной информации (№ борта, № рейса и т.д.), а также готовится специальный файл, предназначенный для записи телевизионного изображения.
После выполнения процедуры подготовки блок памяти 2 устанавливается в контроллер блока сопряжения 6.
В процессе полета навигационной системой 3 непрерывно измеряются и через блок сопряжения 6 выдаются в микроЭВМ 1 текущие географические координаты ϕ, λ, высота полета, скорость W, угол курса ψ, сигналы управления маркером Акр., Дкр., разовые команды “Привязка”, “Сброс”.
Радиолокатор сканирует земную поверхность в секторе азимутальной плоскости в двух режимах работы, задаваемых переключателем на лицевой панели телевизионного индикатора 14:
- в режиме “Обзор” с сектором сканирования ±40 град;
- в режиме “Микроплан” с сектором сканирования ±10, ±20 град.
Для этого формируются кратковременные импульсы сверхвысокочастотных электромагнитных колебаний, которые через антенну излучаются в направлении земной поверхности.
Импульсы, отраженные от различных объектов земной поверхности (мосты, строения, автомашины, корабли и т.д.), в виде РЛС-сигнала принимаются антенной радиолокатора, усиливаются, преобразовываются аналого-цифровым преобразователем 5 в цифровой код и подаются на вход видеопроцессора 11.
Для предотвращения перемещения зоны обзора при изменении положения самолета по углам крена и тангажа, устранения влияния рысканья самолета по курсу на наблюдаемость целей в радиолокатор от навигационной системы 3 через блок сопряжения 6 поступают сигналы крена γ, тангажа ν и курсовой стабилизации ψст.
Видеопроцессор 11 осуществляет обработку принятого сигнала в реальном времени с учетом особенностей работы радиолокатора 4 в режимах “Обзор” и “Микроплан” в соответствии с линейным алгоритмом фильтрации, сочетающим анизотропное двумерное сглаживание РЛС-сигнала и одномерное преобразование лапласиано-подобным оператором по азимуту.
Кадр сглаженного изображения А формируется в соответствии со следующей зависимостью:
где i=0,...,1023-W; j=0,...,1023-LS;
A= - кадр исходного изображения;
- кадр исходного изображения;
W*LS - размер окна сглаживания.
Преобразование лапласиано-подобным оператором по азимуту осуществляется дифференцированием по азимуту путем вычитания из яркости элемента изображения доли яркости его окрестности по азимуту
где i=0,..., 1023-W; j=Lf,...,1023-Lf.
Коэффициент k=1, 2, 4, 8 характеризует степень дифференцирования: чем больше коэффициент k, тем меньше степень дифференцирования.
Коэффициент дифференцирования задается оператором с помощью переключателя, установленного на лицевой панели телевизионного индикатора 14.
Обработанный видеопроцессором 11 цифровой РЛС-сигнал преобразовывается цифроаналоговым преобразователем 13 в аналоговый РЛС-сигнал телевизионного стандарта и подается на второй вход видеосмесителя 12 для последующего отображения на телевизионном индикаторе 14.
МикроЭВМ 1, в соответствии с заложенной в нее программой, по текущим координатам ϕ, λ и высоте Н осуществляет выбор из блока памяти 2 данных цифровой электронной карты участка района полета размером 4096×4096 пикселов. Выбранные данные преобразуются из векторного в матричный вид, затем в соответствии с известными процедурами производятся поворот цифровой электронной карты на угол курса самолета ψ и величину угла азимута маркера Акр., перемасштабирование в соответствии с выбранным режимом радиолокатора 4 и масштабом развертки по дальности М 150-75-25 км, горизонтирование надписей. При большом объеме данных в составе цифровой электронной карты микроЭВМ 1 в соответствии с заложенной программой исключает из файла данные по малоразмерным объектам. Сформированный микроЭВМ файл данных выделенного участка через блок сопряжения 6 передается в видеомодуль цифровой электронной карты 8 для приема, хранения и последующего преобразования.
В начале каждого кадра развертки микроЭВМ 1 задает начальные адреса строки и столбца участка цифровой электронной карты, подлежащего отображению размером 1024×1024 пикселов, относительно которых видеомодулем 8 производятся последовательное считывание цифровых значений пикселов, преобразование, формирование аналогового видеосигнала и выдача его на третий вход видеосмесителя для последующего отображения на экране телевизионного индикатора 14.
Основу видеомодуля цифровой электронной карты 8 составляют оперативное запоминающее устройство (ОЗУ) емкостью 16 Мбайт, позволяющее хранить изображения размером 4096×4096 пикселов, имеющих 256 градаций яркости, схема управления и синхронизации, схема формирования адреса ОЗУ и цифроаналоговый преобразователь (не показаны).
После обработки данных цифровой электронной карты микроЭВМ 1 формирует данные символьной информации, включающие, например, условное обозначение и положение маркера 15, метки дальности 16, положение и цифровые значения навигационных параметров: дальности 17; заданного курса 18; положение и цифровые значения движущейся шкалы текущего курса 19; положение и условное обозначение индекса неподвижного указателя курса 20; отметки от целей 21.
Упомянутые данные символьной информации отображаются на телевизионном индикаторе вместе с отображением радиолокационной обстановки 22, отображением цифровой электронной карты 23, совмещенным отображением радиолокационной обстановки и цифровой электронной карты (фиг.2-4).
Сформированные микроЭВМ 1 данные символьной информации в виде файла передаются через блок сопряжения 6 в видеомодуль символьной информации 7 для приема, хранения и последующей выдачи данных на первый вход видеосмесителя 12.
Кроме того, видеомодуль символьной информации 7 обеспечивает формирование маски, необходимой для получения удобочитаемого изображения после преобразования цифрового РЛС-сигнала в аналоговый РЛС-сигнал телевизионного стандарта с учетом коррекции движения самолета.
Видеомодуль символьной информации 7 содержит счетчики и мультиплексоры адреса, схему синхронизации, оперативное запоминающее устройство, буферные регистры, постоянное запоминающее устройство (ПЗУ) и выходной сдвиговый регистр (не показаны).
Цикл работы видеомодуля 7 состоит из двух тактов.
В первом такте данные двух пикселов из микроЭВМ 1 заносятся в буферный регистр и по сигналу записи из схемы синхронизации заносятся по соответствующим адресам в ОЗУ.
Во втором такте по адресам, формируемым на счетчиках и мультиплексоре адреса, осуществляются считывание из ОЗУ значений двух пикселов символьной информации и выдача их на видеосмеситель 12.
Значение маски для каждого пиксела телевизионной развертки хранятся в ПЗУ и определяются режимом радиолокатора 4.
Считываемые из ПЗУ значения маски заносятся в буферный сдвиговый регистр, на выходе которого формируется сигнал маски, поступающий на первый вход видеосмесителя 12.
На выходе видеосмесителя 12 формируется совмещенный телевизионный сигнал цифровой электронной карты, радиолокационной обстановки, символьно-графической информации, который подается на вход преобразователя телевизионного сигнала 9 и на видеовход телевизионного индикатора 14.
Преобразователем телевизионного сигнала 9 формируется цифровой код смешанного телевизионного сигнала, который через блок сопряжения 6 выдается в микроЭВМ 1, где выполняется стандартная процедура сжатия цифрового кода, а затем по сигналам навигационной системы 3 “Привязка”, “Сброс” производится его запись в специальный файл блока памяти 2 для послеполетной обработки и анализа действий экипажа в полете.
В режиме “Контроль” микроЭВМ 1 с учетом импульсов синхронизации и режимов работы радиолокатора 4 организует выдачу информации из ПЗУ модуля контрольных данных 10 данных цифрового тестового РЛС-сигнала на третий вход видеопроцессора 11, а также данных тестового изображения цифровой электронной карты из контрольного блока памяти 2 и контрольных данных символьно-графической информации в видеомодуль 8 и видеомодуль символьной информации 7 соответственно.
Телевизионный индикатор 14 обеспечивает отображение на экране смешанного телевизионного сигнала. Для обеспечения требуемого качества изображения в видеосмесителе 12 предусмотрена регулировка уровней сигнала цифровой электронной карты и РЛС-сигнала с помощью регулятора на лицевой панели телевизионного индикатора 14.
Это позволяет оператору при необходимости получить на экране телевизионное изображение радиолокационной обстановки в заданном секторе земной поверхности по курсу самолета или телевизионное изображение цифровой электронной карты или совмещенное изображение радиолокационной обстановки и цифровой электронной карты.
Синхронизация работы видеопроцессора 11, видеомодулей, преобразователей и развертки телевизионного сигнала осуществляется синхросигналами, формируемыми микроЭВМ 1 и выдаваемыми в эти блоки через блок сопряжения 6. В системе предусмотрен режим контроля, задаваемого оператором посредством переключателя на лицевой панели телевизионного индикатора 14.
Для реализации этого режима в модуле контрольных данных 10, включающем постоянное запоминающее устройство (ПЗУ), хранятся тестовые изображения для различных режимов работы радиолокатора 4 (“Обзор”, “Микроплан”), масштабов развертки и сектора обзора.
Тестовые изображения отображаются оператору на телевизионном индикаторе 14, и оператор может их сравнивать с изображениями, приведенными в инструкции по эксплуатации системы.
Многократное воспроизведение предлагаемой системы действительно возможно, т.к. все ее модули и устройства могут быть выполнены на типовой отечественной и зарубежной элементной базе.
Так, в качестве микроЭВМ 1 можно применить, например, встраиваемую одноплатную бортовую ЭВМ отечественной разработки БАГЕТ-83 в стандарте PC-104 на базе процессорного модуля с тактовой частотой 100 МГц и обеспечивающую управление объектами в реальном времени.
В качестве блока памяти может быть использована FLASH-карта стандарта PCMCIA емкостью 0,5-1 Гб. Видеомодули, преобразователи, видеопроцессор легко реализуются отечественными электрорадиоэлементами - микросхемами серий 1533, 533, 556, конденсаторами серий К10-17а, а также зарубежными микросхемами типа АМ7202А и др.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2011 |
|
RU2488775C1 |
| НАВИГАЦИОННОЕ УСТРОЙСТВО | 2001 |
|
RU2190189C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2022 |
|
RU2791341C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ВЫСОКОСКОРОСТНЫХ СУДОВ | 2004 |
|
RU2260191C1 |
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ САМОЛЕТА | 2002 |
|
RU2216484C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ САМОЛЕТ | 2003 |
|
RU2231478C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2392586C1 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА МНОГОФУНКЦИОНАЛЬНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2476920C1 |
| АВТОМАТИЧЕСКАЯ НРЛС С УВЕЛИЧЕННЫМ НЕОБСЛУЖИВАЕМЫМ ПЕРИОДОМ АВТОНОМНОЙ РАБОТЫ | 2012 |
|
RU2522910C2 |

Изобретение относится к способам и системам индикации целей и может использоваться на различных типах самолетов и вертолетов в составе прицельно-навигационных комплексов и систем. Достигаемым техническим результатом является улучшение эксплуатационных характеристик путем повышения качества РЛС-изображения, отображаемого на индикаторе, и использования цифровой электронной карты. Поставленная задача решается тем, что в способе, основанном на совмещенном отображении на телевизионном индикаторе радиолокационного изображения места нахождения цели (РЛС-изображения) и изображения перемещают на телевизионном индикаторе, согласовывая перемещение с изменением положения самолета в пространстве, выводят на телевизионный индикатор карту участка подстилающей поверхности в районе РЛС-изображения, согласованную с режимом работы локатора и с координатами текущего местоположения самолета, определенными навигационной системой. Совмещенное отображение перемещают с учетом компонентов путевой скорости летательного аппарата, разворачивают с учетом курса и прицельного азимута, регулируют баланс РЛС-изображения и изображения карты, при этом в качестве карты используют цифровую электронную карту, подготовленную перед полетом в наземных условиях. Для обработки РЛС-изображения используют матричный видеопроцессор, а при подготовке карты на нее наносят текстовые названия географических объектов и целей, их координаты, а для программируемых целей на карту наносят условные обозначения цели. Поставленная цель достигается с помощью системы распознавания цели, включающей радиолокатор, навигационную систему, последовательно соединенные видеомодуль символьной информации, видеосмеситель и телевизионный индикатор, последовательно соединенные аналого-цифровой преобразователь, видеопроцессор и цифроаналоговый преобразователь, а также микроЭВМ, блок памяти, блок сопряжения, видеомодуль цифровой электронной карты, преобразователь телевизионного сигнала и модуль контрольных данных. 2 с. и 2 з.п. ф-лы, 4 ил.
| US 4081802 А, 28.03.1978 | |||
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2170409C1 |
| ПАССИВНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИЗЛУЧАЮЩЕГО ОБЪЕКТА | 1998 |
|
RU2134891C1 |
| Способ получения арилдихлорфосфитов | 1975 |
|
SU550399A1 |
| US 4590569 А, 20.05.1986 | |||
| US 5440483 А, 08.08.1995 | |||
| JP 91119975, 06.05.1997. | |||

