Изобретение относится к области авиационных систем, обеспечивающих решение задач управления, навигации, обнаружения целей, прицеливания, наведения и применения оружия, индикации навигационных, радиолокационных данных и данных о работе систем самолета и оружия.
Известна комплексная система, описанная в [1] и содержащая взаимосвязанные оптико-прицельную систему, активную радиолокационную прицельную станцию, пилотажно-навигационную систему, индикатор на лобовом стекле, систему управления оружием и комплект вооружения.
Недостатками такой системы являются необходимость подготовки нескольких носителей полетных заданий и большое время ввода исходных данных со специализированных пультов управления, наличие ложных и неоднозначных восприятии, существенной рабочей нагрузки и быстрой утомляемости экипажа при работе со специализированными, разнесенными по информационно-управляющему полю кабины пультами и индикаторами, невозможность адаптации оборудования при изменении номенклатуры средств прицеливания и оружия.
Наиболее близкой к предлагаемой и принятой в качестве прототипа является комплексная система управления вооружением самолета, описанная в [2]. Система - прототип содержит индикатор на лобовом стекле, оптико-прицельную систему, активную радиолокационную прицельную станцию, пилотажно-навигационную систему, систему управления оружием, комплект вооружения, бортовую вычислительную машину, блок репрограммируемой памяти, многофункциональные индикаторы, дисплейный процессор, блок преобразования телевизионных сигналов, спутниковую систему навигации. Недостатком системы-прототипа является недостаточная эффективность применения оружия из-за недостаточной точности навигации, обнаружения целей, наведения и применения оружия, ограниченность возможностей применения оружия из-за невозможности обнаружения, сопровождения и наведения оружия на наземные и надводные цели, ограниченность набора применяемых авиационных средств поражения, недостаточной отказоустойчивости системы.
Задачей изобретения является расширение функциональных возможностей системы управления и повышение эффективности применения оружия.
Сущность изобретения заключается в том, что комплексная система управления вооружением самолета, содержащая навигационную систему 1, спутниковую навигационную систему 3, радиолокационную станцию 6, первый многофункциональный индикатор 10, второй многофункциональный индикатор 11, индикатор 12 на лобовом стекле, дополнительно содержит первое бортовое вычислительное устройство 2, коммутатор 4 сигналов навигационной информации, формирователь 5 сигнала резервного режима навигационного комплекса, второе бортовое вычислительное устройство 7, цифровую вычислительную машину 8, коммутатор 9 магистралей, коммутатор 13 телевизионных сигналов, генератор 14 символов, третье бортовое вычислительное устройство 15, блок 23 инерциальных курсовертикалей, систему 24 воздушных сигналов, радиотехническую систему 25 ближней навигации, радиовысотомер 26, регистратор 27 видеоинформации, регистратор 28 полетной информации, четвертое бортовое вычислительной устройство 29, радиостанцию 30, пятое бортовое вычислительное устройство 31, линейный приемник 32, при этом первый выход навигационной системы 1 соединен с первым входом коммутатора 4 сигналов навигационной информации, второй выход навигационной системы 1 соединен с первым входом первого бортового вычислительного устройства 2, первый выход первого бортового вычислительного устройства 2 соединен с управляющим входом (У) навигационной системы 1, второй выход первого бортового вычислительного устройства 2 соединен со вторым входом коммутатора 4 сигналов навигационной информации, ко второму входу первого бортового вычислительного устройства 2 подключена спутниковая навигационная система 3, выход формирователя 5 сигнала резервного режима навигационного комплекса соединен с управляющим входом (У) коммутатора 4 сигналов навигационной информации и седьмым входом первого бортового вычислительного устройства 2, выход блока 23 инерциальных курсовертикалей соединен с первым входом навигационной системы 1 и восьмым входом первого бортового вычислительного устройства 2, выход системы 24 воздушных сигналов соединен со вторым входом навигационной системы 1 и девятым входом первого бортового вычислительного устройства 2, выход радиотехнической системы 25 ближней навигации соединен с третьим входом навигационной системы 1 и десятым входом первого бортового вычислительного устройства 2, выход радиовысотомера 26 соединен с четвертым входом навигационной системы 1 и одиннадцатым входом первого бортового вычислительного устройства 2, выход коммутатора 4 сигналов навигационной информации является выходом 21 навигационных данных, третий выход первого бортового вычислительного устройства 2 соединен с первыми входами регистратора 28 полетной информации и четвертого бортового вычислительного устройства 29, четвертый выход первого бортового вычислительного устройства 2 соединен со вторыми входами второго бортового вычислительного устройства 7, первого многофункционального индикатора 10, второго многофункционального индикатора 11, генератора 14 символов и третьего бортового вычислительного устройства 15, первый выход второго бортового вычислительного устройства 7 соединен третьим входом первого бортового вычислительного устройства 2, с третьими входами первого и второго многофункциональных индикаторов 10 и 11, третьим входом генератора 14 символов и первым входом третьего бортового вычислительного устройства 15, второй выход второго бортового вычислительного устройства 7 соединен с управляющим входом (У) линейного приемника 32, третий выход второго бортового вычислительного устройства 7 соединен со вторыми входами регистратора 28 полетной информации и четвертого бортового вычислительного устройства 29, четвертый выход второго бортового вычислительного устройства 7 соединен с четвертыми входами первого и второго многофункциональных индикаторов 10 и 11, третьим входом третьего бортового вычислительного устройства 15 и образует первый выход 22 радиолокационных данных, первый вход-выход второго бортового вычислительного устройства 7 соединен с первым входом-выходом коммутатора 9 магистралей, второй вход-выход которого соединен с входом-выходом пятого бортового вычислительного устройства 31, третий вход-выход коммутатора 9 магистралей соединен с управляющим входом-выходом (У) радиолокационной станции 6, выход линейного приемника 32 соединен с входом цифровой вычислительной машины 8, выход которой соединен с шестыми входами первого и второго многофункциональных индикаторов 10 и 11, а также с четвертым входом четвертого бортового вычислительного устройства 29, выход сигнала промежуточной частоты (fпч) радиолокационной станции 6 соединен с входом линейного приемника 32, выход сигнала опорной частоты (fоп) радиолокационной станции 6 соединен с входом опорной частоты (fоп) линейного приемника 32, второй вход-выход второго бортового вычислительного устройства 7 соединен с управляющим входом-выходом (У) цифровой вычислительной машины 8, выход радиолокационной станции 6 образует второй выход 33 радиолокационных данных, выход первого многофункционального индикатора 10 соединен с пятыми входами первого и третьего бортовых вычислительных устройств 2 и 15 и с третьим входом второго бортового вычислительного устройства 7, выход второго многофункционально индикатора 11 соединен с четвертыми входами первого, второго и третьего бортовых вычислительных устройств 2, 7 и 15, первый выход коммутатора 13 телевизионных сигналов соединен с пятым входом первого многофункционального индикатора 10, второй выход коммутатора 13 телевизионных сигналов соединен с пятым входом второго многофункционального индикатора 11, выход генератора 14 символов соединен с входом индикатора 12 на лобовом стекле, первый выход третьего бортового вычислительного устройства 15 соединен с шестым входом первого бортового вычислительного устройства 2, первым входом второго бортового вычислительного устройства 7, первыми входами первого и второго многофункциональных индикаторов 10 и 11 и первым входом генератора 14 символов, второй выход третьего бортового вычислительного устройства 15 соединен с третьими входами регистратора 28 полетной информации и четвертого бортового вычислительного устройства 29, входы коммутатора 13 телевизионных сигналов являются входами 161..., 16N телевизионных сигналов, первый вход-выход третьего бортового вычислительного устройства 15 является входом-выходом 17 канала связи с корректируемыми авиабомбами, второй вход-выход третьего бортового вычислительного устройства 15 является входом-выходом 18 канала связи с ракетами "воздух-воздух", третий вход-выход третьего бортового вычислительного устройства 15 является входом-выходом 19 канала связи с ракетами "воздух-РЛС", четвертый вход-выход третьего бортового вычислительного устройства 15 является входом-выходом 20 канала связи с ракетами "воздух-поверхность", выходы видеосигналов (В) первого и второго многофункциональных индикаторов 10 и 11 соединены соответственно с первым и вторым входами регистратора 27 видеоинформации, выход четвертого бортового вычислительного устройства 29 соединен с входом радиостанции 30.
Сущность изобретения поясняется чертежом, на котором приведена функциональная схема предлагаемой системы управления.
На чертеже обозначены:
1 - навигационная система;
2 - первое бортовое вычислительное устройство;
3 - спутниковая навигационная система;
4 - коммутатор сигналов навигационной информации;
5 - формирователь сигнала резервного режима навигационного комплекса;
6 - радиолокационная станция;
7 - второе бортовое вычислительное устройство;
8 - цифровая вычислительная машина;
9 - коммутатор магистралей;
10 - первый многофункциональный индикатор;
11 - второй многофункциональный индикатор;
12 - индикатор на лобовом стекле;
13 - коммутатор телевизионных сигналов;
14 - генератор символов;
15 - третье бортовое вычислительное устройство;
161 - первый вход телевизионного сигнала;
16N - N-й вход телевизионного сигнала;
17 - вход-выход канала связи с корректируемыми авиабомбами;
18 - вход-выход канала связи с ракетами "воздух-воздух";
19 - вход-выход канала связи с ракетами "воздух-РЛС";
20 - вход-выход канала связи с ракетами "воздух-поверхность";
21 - выход навигационных данных;
22 - первый выход радиолокационных данных;
23 - блок инерциальных курсовертикалей;
24 - система воздушных сигналов;
25 - радиотехническая система ближней навигации;
26 - радиовысотомер;
27 - регистратор видеоинформации;
28 - регистратор полетной информации;
29 - четвертое бортовое вычислительное устройство;
30 - радиостанция;
31 - пятое бортовое вычислительное устройство;
32 - линейный приемник;
33 - второй выход радиолокационных данных.
Навигационная система 1 представляет собой навигационный вычислитель текущих координат самолета и содержит цифровые вычислительные устройства, а также связанные с ними устройства сопряжения (адаптеры), которые обеспечивают прием данных от блока 23 инерциальных курсовертикалей, системы 24 воздушных сигналов, радиотехнической системы 25 ближней навигации и радиовысотомера 26, прием управляющих сигналов от первого бортового вычислительного устройства 2, передачу выходных сигналов в коммутатор 4 и первое бортовое вычислительное устройство 2 через свои соответственно первый и второй выходы.
Блок 23 инерциальных курсовертикалей содержит одну или несколько инерциальных курсовертикалей. Инерциальные курсовертикали блока 23 инерциальных курсовертикалей выдают информацию о составляющих скорости самолета, его крене и тангаже.
Система 24 воздушных сигналов содержит барометрические датчики высоты и скорости.
Радиотехническая система 25 ближней навигации вырабатывает данные о дальности и азимуте относительно наземного радиомаяка.
На основании данных, поступающих от блока 23 инерциальных курсовертикалей, системы 24 воздушных сигналов, радиотехнической системы 25 ближней навигации и радиовысотомера 26, осуществляется вычисление текущих координат самолета.
Первый и второй выходы навигационной системы 1 являются выходами цифровых каналов связи цифровых вычислительных устройств, входящих в состав навигационной системы 1.
Цифровые вычислительные устройства навигационной системы 1 осуществляют вычисление координат самолета на основании первичных навигационных данных, поступающих от блока 23 инерциальных курсовертикалей, системы 24 воздушных сигналов, радиотехнической системы 25 ближней навигации и радиовысотомера 26 и преобразование их в системы координат, необходимые потребителям навигационной информации.
Управляющий вход (У) навигационной системы 1 является входом цифровых каналов связи цифровых вычислительных устройств. При вычислении координат цифровые вычислительные устройства навигационной системы 1 используют данные о погрешностях инерциальных курсовертикалей, значения которых задаются заранее или поступают через управляющий вход (У) навигационной системы 1.
Каждое из бортовых вычислительных устройств 2, 7 и 15 содержит связанные между собой внутренней интерфейсной магистралью, по меньшей мере, одну цифровую вычислительную машину, одно долговременное электроперепрограммируемое запоминающее устройство и наборы адаптеров каналов связи и устройств сопряжения, входы и выходы которых являются соответственно входами и выходами первого, второго и третьего бортовых вычислительных устройств 2, 7 и 15. Долговременные электроперепрограммируемые запоминающие устройства служат для хранения бортовой базы данных, которая содержит информацию о навигационных точках, маршрутах полетов (данных об оперативных пунктах маршрутов), различную информацию об аэродромах, линиях фронта, зонах запрета, средствах противовоздушной обороны и другую информацию. Кроме этого, частично информация бортовой базы данных, в частности карты местности, находится в долговременных электроперепрограммируемых запоминающих устройствах первого и второго многофункциональных индикаторов 10 и 11. Первое, второе и третье бортовые вычислительные устройства 2, 7 и 15 выполнены с возможностью подключения к внешним каналам связи, по которым может передаваться информация в бортовую базу данных, что позволяет оперативно обновлять и дополнять содержание бортовой базы данных, в том числе при помощи радиоканалов взаимного обмена информацией непосредственно в процессе полета, а также осуществлять обмен навигационной, радиолокационной и другой информацией с другими летательными аппаратами и наземными службами.
Навигационная система 1, первое бортовое вычислительное устройство 2, спутниковая навигационная система 3, коммутатор 4 сигналов навигационной информации и формирователь 5 сигнала резервного режима навигационного комплекса, блок 23 инерциальных курсовертикалей, система 24 воздушных сигналов, радиотехническая система 25 ближней навигации и радиовысотомер 26 образуют навигационный комплекс.
В основном режиме работы навигационного комплекса первое бортовое вычислительное устройство 2 осуществляет обработку данных, поступающих от навигационной системы 1 и спутниковой навигационной системы 3, а также первичной навигационной информации, поступающей от блока 23 инерциальных курсовертикалей, системы 24 воздушных сигналов, радиотехнической системы 25 ближней навигации и радиовысотомера 26. Первое бортовое вычислительное устройство 2 осуществляет комплексирование поступающих навигационных данных. На основании данных от спутниковой навигационной системы 3 первое бортовое вычислительное устройство осуществляет вычисление составляющих дрейфов конкретных экземпляров гироскопов инерциальных курсовертикалей и погрешностей навигационных датчиков. На основании этих данных в случае отсутствия данных от спутниковой навигационной системы 3 в течение определенного периода времени осуществляется экстраполяция данных навигационной системы 1, что позволяет повысить точность определения навигационных параметров даже при неработоспособности спутниковой навигационной системы 3. При этом используются данные, накопленные в процессе предыдущих полетов самолета. Методы вычисления составляющих дрейфов гироскопов и экстраполяции навигационных данных описаны, например, в описании изобретения по патенту [3].
Спутниковая навигационная система 3 обеспечивает прием сигналов навигационных спутников систем ГЛОНАСС и NAVSTAR и вычисляет по этим данным географические координаты самолета, а также определяет точное время. Эти данные по последовательному каналу передаются в первое бортовое вычислительное устройство 2. Причем возможно использование данных одновременно и от спутников системы ГЛОНАСС, и от спутников системы NAVSTAR.
Навигационная информация, полученная в результате обработки данных, поступающих от навигационной системы 1, первичной навигационной информации, поступающей от блока 23 инерциальных курсовертикалей, системы 24 воздушных сигналов, радиотехнической системы 25 ближней навигации, радиовысотомера 26 и данных спутниковой навигационной системы 3, выдается первым бортовым вычислительным устройством 2 через его второй выход и через коммутатор 4 сигналов навигационной информации на выход 21 навигационных данных. Выход 21 навигационных данных служит для подключения системы автоматического управления самолета. Также навигационная информация выдается первым бортовым вычислительным устройством через его третий выход в регистратор 28 полетной информации и в четвертое бортовое вычислительное устройство 29 и через четвертый выход в первый и второй многофункциональные индикаторы 10 и 11, в генератор 14 символов, во второе и третье бортовые вычислительные устройства 7 и 15.
В резервном режиме работы навигационного комплекса на выход 21 навигационных данных (и соответственно в подключенную к этому выходу систему автоматического управления самолета) выдается навигационная информация, поступающая непосредственно с первого выхода навигационной системы 1.
Формирователь 5 сигнала резервного режима навигационного комплекса может представлять собой переключатель (тумблер, кнопку) или более сложное электронное устройство (в том числе цифровую вычислительную машину). Функции формирователя 5 сигнала резервного режима навигационного комплекса могут быть возложены на одно из бортовых вычислительных устройств или на вычислительные устройства первого или второго многофункциональных индикаторов 10 или 11.
Кроме системы автоматического управления самолета к выходу 21 навигационных данных могут быть подключены внешние системы-потребители навигационной информации, такие как система управления оружием и целеуказания, дополнительные индикаторы, система регистрации полетной информации и т.п.
Радиолокационная станция 6, второе бортовое вычислительное устройство 7, цифровая вычислительная машина 8 и коммутатор 9 магистралей, пятое бортовое вычислительное устройство 31 и линейный приемник 32 образуют радиолокационный комплекс.
Радиолокационная станция 6 обеспечивает обнаружение и сопровождение воздушных целей (режим "воздух-воздух"). Для управления радиолокационной станцией 6 служит пятое бортовое вычислительное устройство 31. В данном режиме коммутатор 9 магистралей соединяет вход-выход пятого бортового вычислительного устройства 31 с управляющим входом-выходом (У) радиолокационной станции 6. Радиолокационная станция 6 осуществляет обработку радиолокационных данных и решение задач обнаружения целей, определения параметров движения целей, сопровождения целей и т.п.
Радиолокационные данные от радиолокационной станции 6 поступают через второй выход 33 радиолокационных данных потребителям радиолокационной информации (авиационным средствам поражения).
В режиме обнаружения и сопровождения надводных и наземных целей (режим "воздух-поверхность") управление радиолокационной станцией 6 и формирование сигнала, излучаемого антенной радиолокационной станции 6, осуществляет второе бортовое вычислительное устройство 7. В данном режиме коммутатор 9 магистралей соединяет первый вход-выход второго бортового вычислительного устройства 7 с управляющим входом-выходом (У) радиолокационной станции 6. При этом для дальнейшей обработки используется сигнал предварительной частоты fпч, поступающий с выхода сигнала предварительной частоты радиолокационной станции 6.
Этот сигнал поступает на вход линейного приемника 32, в котором после прохождения фазового детектора сигнал преобразуется в цифровую форму.
Линейный приемник 32 содержит последовательно соединенные усилитель, фазовый детектор и аналого-цифровой преобразователь.
Обработка оцифрованного радиолокационного сигнала, поступающего с выхода линейного приемника 32, осуществляется цифровой вычислительной машиной 8.
Цифровая вычислительная машина 8 является специализированной вычислительной машиной для цифровой обработки сигналов и решает задачи по обнаружению, сопровождению, определению параметров движения наземных и надводных целей. Цифровая вычислительная машина 8 содержит программируемый процессор сигналов. Результаты обработки радиолокационных данных в цифровой вычислительной машине 8 в виде цифрового видеосигнала выдаются на выход цифровой вычислительной машины 8, а также в виде численных данных передаются через управляющий вход-выход (У) цифровой вычислительной машины 8 во второе ботовое вычислительное устройство 7, которое через свой четвертый выход выдает эту информацию в первый и второй многофункциональные индикаторы 10 и 11, в третье бортовое вычислительное устройство 15 и на первый выход 22 радиолокационных данных.
К первому выходу 22 радиолокационных данных могут быть подключены внешние системы-потребители радиолокационной информации, такие как система управления оружием и целеуказания, дополнительные индикаторы, система регистрации полетной информации и т.п. С выхода цифровой вычислительной машины 8 радиолокационная информация передается в первый и второй многофункциональные индикаторы 10 и 11, а также в четвертое бортовое вычислительное устройство 29.
Третье бортовое вычислительное устройство 15 обеспечивает управление авиационными средствами поражения (корректируемыми авиабомбами, ракетами "воздух-воздух", "воздух-РЛС", "воздух-поверхность"), выдачу в них целеуказания, команд, радиолокационной и навигационной информации, прием от них информации об их состоянии.
Устройства согласования (адаптеры), входящие в состав навигационной системы 1, вычислительные устройства 2, 7, 15, 29, 31 и другие блоки системы могут быть выполнены по различным известным схемам в зависимости от видов сигналов, которые необходимо согласовывать (преобразовывать), например, по схемам, приведенным в описании к изобретениям [4, 5].
Регистратор 28 полетной информации осуществляет запись и хранение информации, поступающей от навигационного и радиолокационного комплексов и от третьего бортового вычислительного устройства 15 (информацию от авиационных средств поражения, подключенных к входам-выходам третьего бортового вычислительного устройства 15). Регистратор 28 полетной информации может быть выполнен с возможностью демонтажа и замены его запоминающего устройства (носителя информации) для передачи собранной информации в другие вычислительные системы и устройства для ее дальнейшей обработки и анализа.
Информация, передаваемая в регистратор 28 полетной информации, а также цифровой видеосигнал с выхода цифровой вычислительной машины 8 поступают на соответствующие входы четвертого бортового вычислительного устройства 29, которое подготавливает эту информацию для ее передачи при помощи радиостанции 30 наземным службам и другим летательным аппаратам по радиоканалу.
Каждый из многофункциональных бортовых индикаторов 10 и 11 содержат видеоиндикатор, видеографический процессор, магистраль информационного обмена видеоинформацией, системную магистраль информационного обмена, электронно-вычислительную машину, долговременное запоминающее устройство, адаптер ввода-вывода, панель управления, телевизионный видеоадаптер с регулятором яркости и регулятором контрастности, формирователь телевизионного сигнала, лампу подсвета видеоиндикатора с регулятором яркости лампы подсвета видеоиндикатора, устройство управления, вентилятор принудительного обдува, обогреватель видеоиндикатора, формирователь управляющего напряжения лампы подсвета видеоиндикатора, первый и второй датчики температуры, первый и второй датчики освещенности, при этом входы видеоинформации видеоиндикатора, входы видеоинформации формирователя телевизионного сигнала и выходы видеоинформации видеографического процессора соединены с магистралью информационного обмена видеоинформацией, входы-выходы информационного обмена видеографического процессора, входы-выходы информационного обмена электронно-вычислительной машины, входы-выходы информационного обмена долговременного запоминающего устройства и входы-выходы информационного обмена адаптера ввода-вывода соединены с системной магистралью информационного обмена, входы адаптера ввода-вывода с первого по третий являются входами последовательных каналов многофункционального бортового индикатора с первого по третий соответственно, выход адаптера ввода-вывода является выходом последовательного канала многофункционального бортового индикатора, к входам-выходам цифрового ввода-вывода электронно-вычислительной машины подключена панель управления, выход телевизионного видеоадаптера соединен cо входом оцифрованного видеосигнала видеографического процессора, к входу управления яркостью и к входу управления контрастностью телевизионного видеоадаптера подключены соответственно регулятор яркости и регулятор контрастности, первый и второй входы телевизионного видеоадаптера являются соответственно входом полного телевизионного сигнала многофункционального бортового индикатора и входом цветоделенного телевизионного сигнала многофункционального бортового индикатора, выход формирователя телевизионного сигнала является выходом телевизионного сигнала многофункционального бортового индикатора, к входам с первого по четвертый устройства управления подключены соответственно первый датчик температуры, второй датчик температуры, первый датчик освещенности и второй датчик освещенности, к первому и второму выходам устройства управления подключены соответственно вентилятор принудительного обдува и обогреватель видеоиндикатора, третий и четвертый выходы устройства управления соединены соответственно со вторым и первым входами формирователя управляющего напряжения лампы подсвета видеоиндикатора, пятый выход устройства управления соединен с управляющим входом видеоиндикатора, к управляющему входу формирователя управляющего напряжения лампы подсвета видеоиндикатора подключен регулятор яркости лампы подсвета видеоиндикатора, к первому, второму и третьему выходам формирователя управляющего напряжения лампы подсвета видеоиндикатора подключены соответственно лампа подсвета видеоиндикатора, первая нить накала лампы подсвета видеоиндикатора, вторая нить накала лампы подсвета видеоиндикатора.
Многофункциональные индикаторы 10 и 11 могут быть выполнены по различным схемам, например, приведенным в описании изобретения по патенту [6].
Первый, второй и третий входы первого и второго многофункциональных индикаторов 10 и 11 образованы соответственно первыми, вторыми и третьими входами адаптера ввода-вывода и являются входами последовательных каналов. Пятые входы первого и второго многофункциональных индикаторов 10 и 11 образованы первыми входами телевизионного видеоадаптера и являются входами полного телевизионного сигнала, а четвертые входы первого и второго многофункциональных индикаторов 10 и 11 образованы вторыми входами телевизионного видеоадаптера и являются входами цветоделенного телевизионного сигнала (RGB). Шестые входы первого и второго многофункциональных индикаторов 10 и 11 являются входами цифрового цветоделенного видеосигнала. Выходы первого и второго многофункциональных индикаторов 10 и 11 образованы выходами адаптеров ввода-вывода и являются выходами последовательных каналов. Выходы видеосигналов (В) первого и второго многофункциональных индикаторов 10 и 11 образованы выходами формирователей телевизионного сигнала.
Информация, выводимая на видеоиндикаторах первого и второго многофункциональных индикаторов 10 и 11 в виде видеосигналов, поступающих на выходы видеосигналов (В) первого и второго многофункциональных индикаторов 10 и 11, записывается регистратором 27 видеоинформации. Регистратор 27 видеоинформации может быть выполнен с возможностью демонтажа и замены его запоминающего устройства (носителя информации).
Комплексная система управления вооружением самолета работает следующим образом.
Информация от навигационного и радиолокационного комплексов поступает в первый и второй многофункциональные индикаторы 10 и 11, которые также используют информацию бортовой базы данных, сигналы, поступающие от телевизионных систем авиационных средств поражения с учетом режима работы, задаваемого оператором (летчиком) при помощи панелей управления многофункциональных индикаторов, формируют изображение на экранах своих видеоиндикаторов. Информация от навигационного и радиолокационного комплексов также передается через третье бортовое вычислительное устройство 15 в авиационные средства поражения. Через входы 161,..., 16N телевизионных сигналов и через коммутатор 13 телевизионных сигналов от телевизионных головок самонаведения авиационных средств поражения поступают видеосигналы на первый и второй многофункциональные индикаторы 10 и 11. При помощи панелей управления первого и второго многофункциональных индикаторов 10 и 11 оператор управляет режимами навигационного и радиолокационного комплексов, многофункциональных индикаторов, управляет подготовкой к пуску и пуском авиационных средств поражения. На основании информации, представленной на экранах первого и второго многофункциональных индикаторов 10 и 11 (навигационной информации, радиолокационных данных, данных об обнаруженных и сопровождаемых целях, изображениях от телевизионных головок самонаведения авиационных средств поражения, информации о состоянии авиационных средств поражения, а также информации из бортовой базы данных) и на индикаторе 12, на лобовом стекле, оператор принимает решение о применении соответствующего авиационного средства поражения и при помощи панелей управления многофункциональных индикаторов выдает соответствующие команды. Под управлением третьего бортового вычислительного устройства 15 производится подготовка к пуску (передача необходимых данных из радиолокационного и навигационного комплексов, из бортовой базы данных в выбранное авиационного средство поражения, выдача необходимых подготовительных и тестовых команд и т.д.) и пуск выбранного авиационного средства поражения. Данные о подготовке и проведении пуска также отображаются на видеоиндикаторах многофункциональных индикаторов. Одновременно данные от радиолокационного и навигационного комплексов и данные о состоянии авиационных средств поражения записываются регистратором 28 полетной информации, а также при помощи четвертого бортового вычислительного устройства 29 и радиостанции 30 передаются по радиоканалу наземным службам и другим летательным аппаратам. Видеоданные от первого и второго многофункциональных индикаторов 10 и 11 записываются регистратором 27 видеоинформации.
Таким образом, использование предлагаемого изобретения позволяет расширить функциональные возможно системы управления вооружением и повысить эффективность его применения.
Промышленная применимость изобретения определяется тем, что предлагаемая система управления может быть изготовлена в соответствии с предлагаемым описанием и чертежами на основе известных комплектующих изделий при использовании современного технологического оборудования и использован по прямому назначению в авиационных системах, обеспечивающих решение задач управления, навигации, обнаружения целей, прицеливания, наведения и применения оружия, индикации навигационных, радиолокационных данных и данных о работе систем самолета и оружия.
Источники информации
1. Мубаракшин Р.В., Балуев В.М., Воронов Б.В. Прицельные системы стрельбы, часть I, М.: ВВИА им. Н. Е. Жуковского, 1973, с.65-97.
2. Св. РФ 12608 на ПМ, МПК G 01 C 23/00, опубл. 20.01.2000г., (прототип).
3. Пат. РФ 2170410 на изобретение, МПК G O1 С 23/00, опубл. 10.01.2001г.
4. Пат. РФ 2159954 на изобретение, МПК G O1 F 13/00, опубл. 27.11.2000г.
5. Пат. РФ 2163728 на изобретение, МПК G 06 F 15/16, опубл. 27.02.2001г.
6. Пат. РФ 2162204 на изобретение, МПК G 01 D 7/00, опубл. 20.01.2001г.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2170409C1 |
| СИСТЕМА ИНДИКАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2206872C2 |
| КОМПЛЕКС НАВИГАЦИИ И ЭЛЕКТРОННОЙ ИНДИКАЦИИ | 2003 |
|
RU2215995C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ БОРТОВОЙ ИНДИКАТОР | 2000 |
|
RU2162204C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2170410C1 |
| КОМБИНИРОВАННАЯ СИСТЕМА НАВИГАЦИИ | 2003 |
|
RU2229686C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2230294C1 |
| КОМБИНИРОВАННЫЙ НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2224220C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2293950C1 |
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ВЕРТОЛЕТА | 2012 |
|
RU2520174C2 |
Изобретение относится к области авиационных систем, обеспечивающих решение задач управления, навигации, обнаружения целей, прицеливания, наведения и применения оружия, индикации навигационных, радиолокационных данных и данных о работе систем самолета и оружия. Технический результат заключается в расширении функциональных возможностей системы управления и повышении эффективности применения оружия. Комплексная система управления вооружением самолета, содержащая навигационную систему, спутниковую навигационную систему, радиолокационную станцию, первый и второй многофункциональные индикаторы, индикатор на лобовом стекле, дополнительно содержит пять бортовых вычислительных устройств, коммутатор сигналов навигационной информации, формирователь сигнала резервного режима навигационного комплекса, цифровую вычислительную машину, коммутатор магистралей, коммутатор телевизионных сигналов, генератор символов, блок инерциальных курсовертикалей, систему воздушных сигналов, радиотехническую систему ближней навигации, радиовысотомер, регистратор видеоинформации, регистратор полетной информации, радиостанцию, линейный приемник. 1 ил.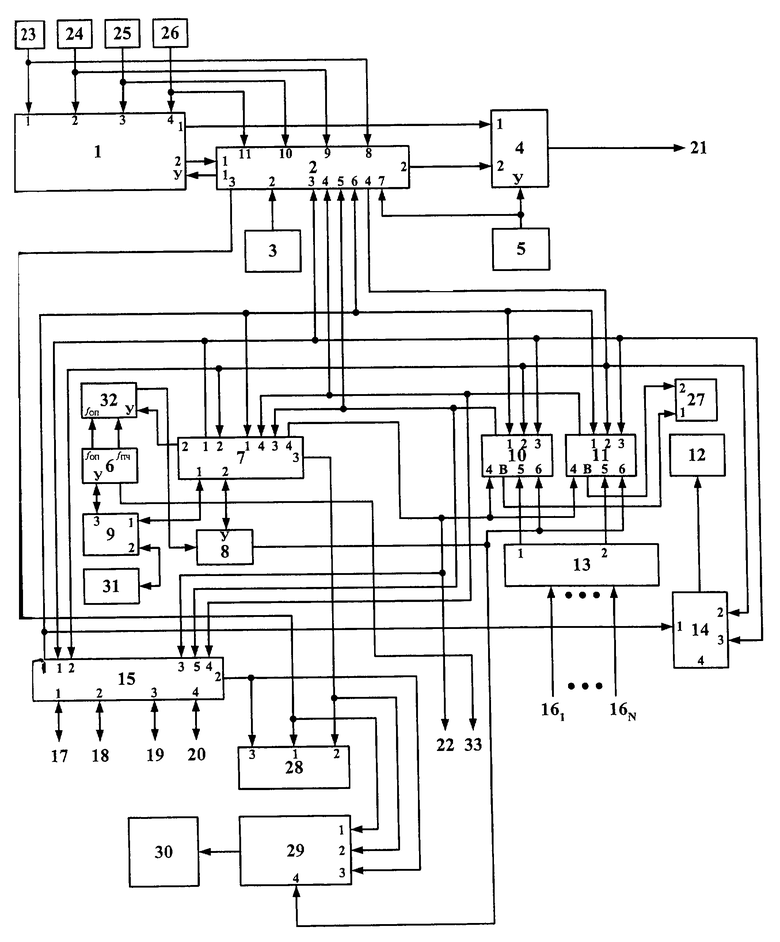
Комплексная система управления вооружением самолета, содержащая навигационную систему, спутниковую навигационную систему, радиолокационную станцию, первый многофункциональный индикатор, второй многофункциональный индикатор, индикатор на лобовом стекле, цифровую вычислительную машину, отличающаяся тем, что дополнительно содержит первое бортовое вычислительное устройство, коммутатор сигналов навигационной информации, формирователь сигнала резервного режима навигационного комплекса, второе бортовое вычислительное устройство, коммутатор магистралей, коммутатор телевизионных сигналов, генератор символов, третье бортовое вычислительное устройство, блок инерциальных курсовертикалей, систему воздушных сигналов, радиотехническую систему ближней навигации, радиовысотомер, регистратор видеоинформации, регистратор полетной информации, четвертое бортовое вычислительное устройство, радиостанцию, пятое бортовое вычислительное устройство, линейный приемник, при этом первый выход навигационной системы соединен с первым входом коммутатора сигналов навигационной информации, второй выход навигационной системы соединен с первым входом первого бортового вычислительного устройства, первый выход первого бортового вычислительного устройства соединен с управляющим входом навигационной системы, второй выход первого бортового вычислительного устройства соединен со вторым входом коммутатора сигналов навигационной информации, ко второму входу первого бортового вычислительного устройства подключена спутниковая навигационная система, выход формирователя сигнала резервного режима навигационного комплекса соединен с управляющим входом коммутатора сигналов навигационной информации и седьмым входом первого бортового вычислительного устройства, выход блока инерциальных курсовертикалей соединен с первым входом навигационной системы и восьмым входом первого бортового вычислительного устройства, выход системы воздушных сигналов соединен со вторым входом навигационной системы и девятым входом первого бортового вычислительного устройства, выход радиотехнической системы ближней навигации соединен с третьим входом навигационной системы и десятым входом первого бортового вычислительного устройства, выход радиовысотомера соединен с четвертым входом навигационной системы и одиннадцатым входом первого бортового вычислительного устройства, выход коммутатора сигналов навигационной информации является выходом навигационных данных, третий выход первого бортового вычислительного устройства соединен с первыми входами регистратора полетной информации и четвертого бортового вычислительного устройства, четвертый выход первого бортового вычислительного устройства соединен со вторыми входами второго бортового вычислительного устройства, первого многофункционального индикатора, второго многофункционального индикатора, генератора символов и третьего бортового вычислительного устройства, первый выход второго бортового вычислительного устройства соединен с третьим входом первого бортового вычислительного устройства, с третьими входами первого и второго многофункциональных индикаторов, третьим входом генератора символов и первым входом третьего бортового вычислительного устройства, второй выход второго бортового вычислительного устройства соединен с управляющим входом линейного приемника, третий выход второго бортового вычислительного устройства соединен со вторыми входами регистратора полетной информации и четвертого бортового вычислительного устройства, четвертый выход второго бортового вычислительного устройства соединен с четвертыми входами первого и второго многофункциональных индикаторов, третьим входом третьего бортового вычислительного устройства и образует первый выход радиолокационных данных, первый вход-выход второго бортового вычислительного устройства соединен с первым входом-выходом коммутатора магистралей, второй вход-выход которого соединен с входом-выходом пятого бортового вычислительного устройства, третий вход-выход коммутатора магистралей соединен с управляющим входом-выходом радиолокационной станции, выход линейного приемника соединен с входом цифровой вычислительной машины, выход которой соединен с шестыми входами первого и второго многофункциональных индикаторов, а также с четвертым входом четвертого бортового вычислительного устройства, выход сигнала промежуточной частоты радиолокационной станции соединен с входом линейного приемника, выход сигнала опорной частоты радиолокационной станции соединен с входом опорной частоты линейного приемника, второй вход-выход второго бортового вычислительного устройства соединен с управляющим входом-выходом цифровой вычислительной машины, выход радиолокационной станции образует второй выход радиолокационных данных, выход первого многофункционального индикатора соединен с пятыми входами первого и третьего бортовых вычислительных устройств и с третьим входом второго бортового вычислительного устройства, выход второго многофункционального индикатора соединен с четвертыми входами первого, второго и третьего бортовых вычислительных устройств, первый выход коммутатора телевизионных сигналов соединен с пятым входом первого многофункционального индикатора, второй выход коммутатора телевизионных сигналов соединен с пятым входом второго многофункционального индикатора, выход генератора символов соединен с входом индикатора на лобовом стекле, первый выход третьего бортового вычислительного устройства соединен с шестым входом первого бортового вычислительного устройства, первым входом второго бортового вычислительного устройства, первыми входами первого и второго многофункциональных индикаторов и первым входом генератора символов, второй выход третьего бортового вычислительного устройства соединен с третьими входами регистратора полетной информации и четвертого бортового вычислительного устройства, входы коммутатора телевизионных сигналов являются входами телевизионных сигналов, первый вход-выход третьего бортового вычислительного устройства является входом-выходом канала связи с корректируемыми авиабомбами, второй вход-выход третьего бортового вычислительного устройства является входом-выходом канала связи с ракетами "воздух-воздух", третий вход-выход третьего бортового вычислительного устройства является входом-выходом канала связи с ракетами "воздух-РЛС", четвертый вход-выход третьего бортового вычислительного устройства является входом-выходом канала связи с ракетами "воздух-поверхность", выходы видеосигналов первого и второго многофункциональных индикаторов соединены соответственно с первым и вторым входами регистратора видеоинформации, выход четвертого бортового вычислительного устройства соединен с входом радиостанции.
| ПРИЦЕЛЬНОЕ ПРИСПОСОБЛЕНИЕ ДЛЯ ГОРИЗОНТАЛЬНОЙ НАВОДКИ ПОМОЩЬЮ СОВМЕЩЕНИЯ ДВУХ ЛИНИЙ, ИЗ КОТОРЫХ ОДНА НАХОДИТСЯ В ПРИЦЕЛЬНОМ ПРИСПОСОБЛЕНИИ, А ДРУГАЯ - НАД ИЛИ ПОД ОРУДИЕМ | 1926 |
|
SU12608A1 |
| СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2150070C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ ИСТРЕБИТЕЛЯ | 1988 |
|
RU2024818C1 |
| DE 3630701 A1, 19.03.1987 | |||
| АВТОТРАНСПОРТНОЕ СРЕДСТВО | 2012 |
|
RU2542863C1 |
| КОМПЛЕКС ГРУППОВОГО БОЕВОГО ВЗАИМОДЕЙСТВИЯ ВЕРТОЛЕТОВ АВИАЦИИ СУХОПУТНЫХ ВОЙСК | 1998 |
|
RU2141625C1 |

